Изобретение относится к электротехнике и может быть использовано для отработки ступенчатых программно-задающих воздействий при регулировании скорости вращения электродвигателей различных .производственных механизмов.
Цель изобретения является повышение основных показателей качества отработки
программно-задающих воздействий, а именно, быстродействия и точности путем пассивной настройки (адаптации) каждого канала управления.
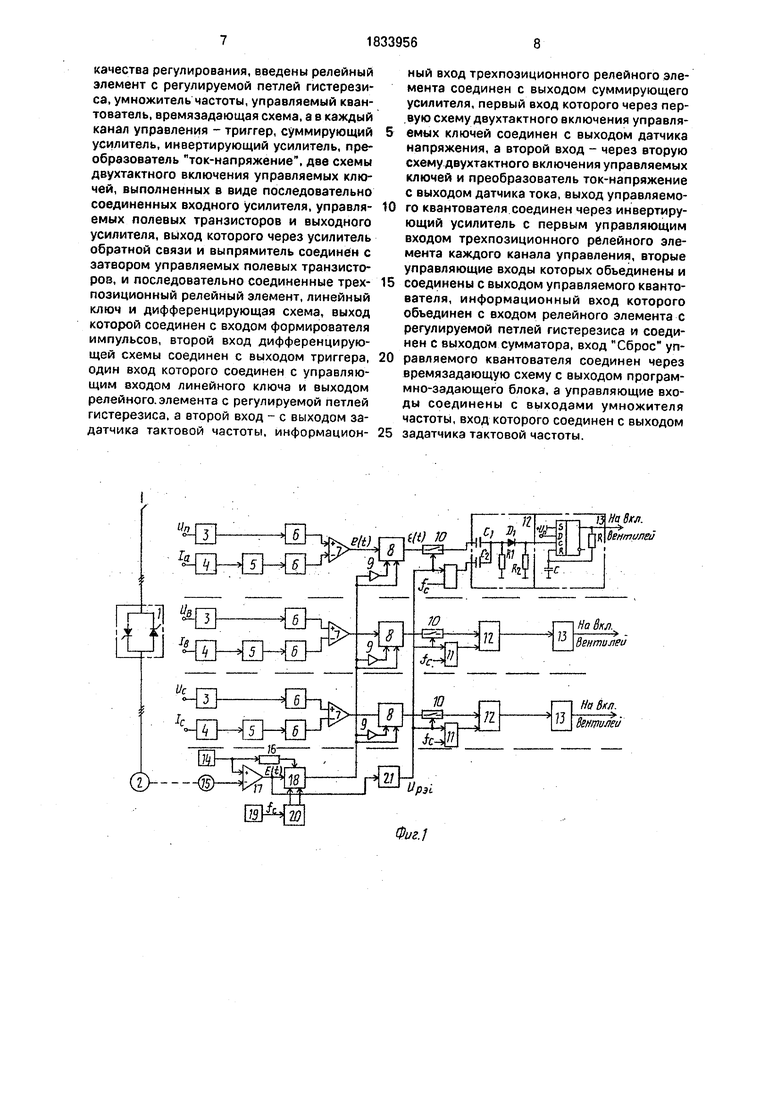
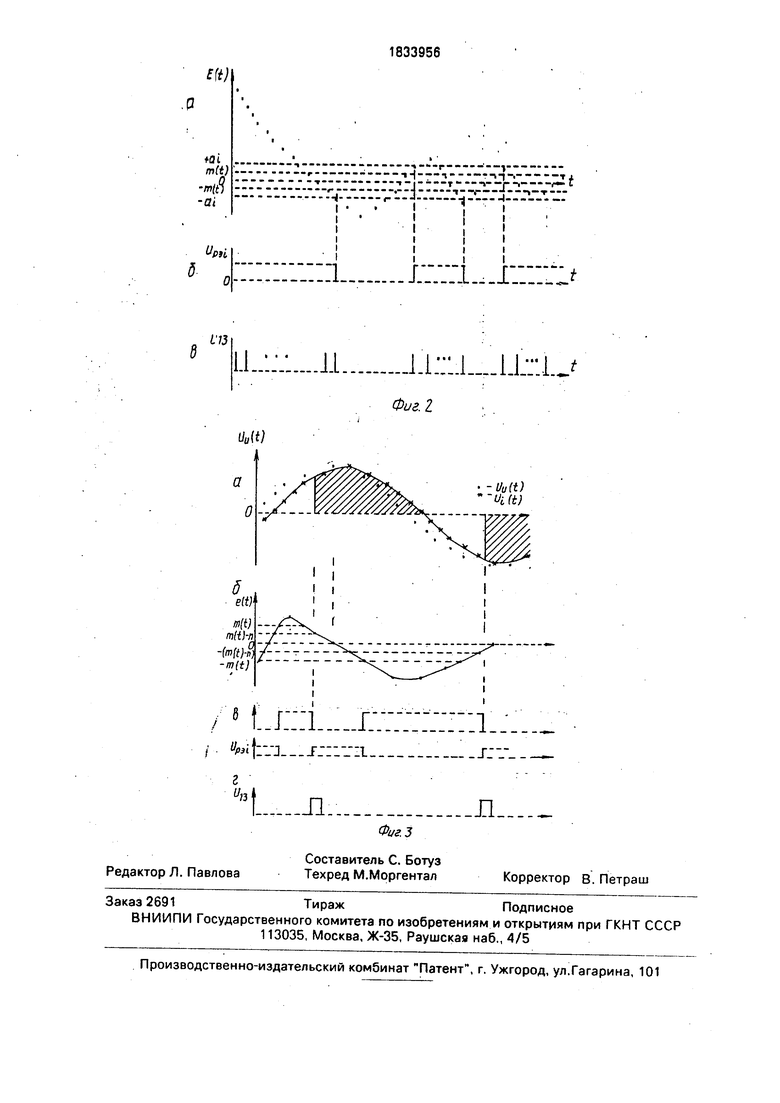
На фиг. 1 представлен пример реализации устройства, реализующего предлагаемый способ; на фиг. 2, 3 - временные диаграммы, поясняющие работу заявленного технического решения.
Устройство для управления электродвигателем с вентильным преобразователем содержит блок тиристорных коммутаторов 1, элактродвигатель 2, датчики напряжения и тока 3, 4, преобразователи ток-на- пряжоние 5, нормирующие устройства 6, суммирующие усилители 7, функциональные преобразователи 8, инвертирующие усилители 9, линейные ключи 10, триггеры 11, дифференцирующие схемы 12, формирователи импульсов 13, выполненные в виде одновибраторов, программно- задающее устройство 14, датчик скорости 15, времязадающая схема 16, сумматор 17, управляемый квантователь 18, задатчик
тактовой частоты 19, в качестве которого может быть использовано сетевое напряжение, умножитель частоты 20 и релейный элемент с регулируемой петлей
гистерезиса 21,
Устройство функционирует следующим
Образом, В начальный момент времени момент подачи, например, ступенчатого
программно-задающего воздействия (ПЗВ),
на выходе сумматора 17 будет сформирован соответствующий сигнал ошибки E(t) (фиг. 2,а), обеспечивая на выходе релейного элемента 21 формирование сигнала; Upai (фиг. 2,6), который может быть описан следующим зависимостями
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| СПОСОБ СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385531C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2383863C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ С ПРЯМЫМ УПРАВЛЕНИЕМ ТОКОМ | 2016 |
|
RU2642819C2 |
| Устройство для управления двигателем переменного тока | 1978 |
|
SU782117A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
Использование: для отработки ступенчатых программно-задающих воздействий при регулировании скорости вращения электродвигателей различных производственных механизмов. Сущность изобретения: способ управления электродвигателем заключается в том, что измеряют частоту вращения электродвигателя, фазные токи и напряжения, преобразуют измеренные фазные токи в напряжении, нормируют измеренные напряжения и напряжения, полученные в результате указанного преобразования фазных токов, сравнивают их мгновенные значения между собой и определяют их разность e(t), одновременно сравнивают измеренное значение частоты вращения с заданным дискретным программно-задающим воздействием, формируют дискретное значение ошибки E(t) по частоте вращения, а управляющие импульсы подают в момент времени, определяемый по установленной зависимости. Устройство для осуществления способа содержит блок тиристорных коммутаторов 1, электродвигатель 2, датчики напряжения и тока 3, 4, преобразователи ток-напряжение 5, нормирующие устройства 6, суммирующие усилители 7, функциональные преобразователи 8, инвертирующие усилители 9, линейные ключи 10, триггеры 11, дифференцирующие схемы 12, формирователи импульсов 13, выполненные в виде одно- вибраторов, программно-задающий блок 14, датчик частоты вращения 15, времязада- ющую схему 16, сумматор 17, управляемый квантователь 18, задатчик тактовой частоты 19, в качестве которого может быть использовано сетевое напряжение, умножитель частоты 20 и релейный элемент с регулируемой петлей гистерезиса 21. 2 с.п. ф- лы, 3 ил. w Ё 00 со GJ ю ел Os
Урэ
sign Е (т), при lE(t)| Ја1 для всех t 0; U-рэ 0-1), при Е (t) G(-a1, а1) для всех t 0;
где
sign Е (t)
+ 1, при E(t) 0; О, при Е (t) 0; -1, при E (t)0;
- величина зоны гистерезиса, Ia1l (2/k1)U1 (k2/k1)U2, приэтом k1 и k2 коэффициенты усиления соответствующих усилителей.
Кроме этого, в начальный момент подачи ПЗВ на выходе времязадающей схемы будет сформирован сигнал сброса, поступающий на соответствующий вход управляемого квантователя 18 - на его третий вход. Этот процесс реализован путем кратковременного замыкания ключей квантователя, которые шунтируют элементы его аналоговой памяти. В свою очередь срабатывание релейного элемента 21 приведет к формированию сигналов запуска в каждой фазе каналов управления по цепи последовательно соединенных триггера 11, дифференцирующей схемы 12 и формирователя импульсов 13, При этом на выходе одновибратора 13 короткий импульс (см. фиг. 2,в) приведет к коммутации обмоток электродвигателя к ис- точнику сетевого напряжения. Здесь и далее для упрощения пояснений будем рассматривать процесс формирования управляющих воздействий на примере формирования сигнала управления в одной фазе, т.к. это процесс справедлив для каждой фазы в отдельности.
Измеренные значения фазных токов la (Id, Ic) преобразовывают в напряжение с
0
5
0 5 0 5 0
помощью преобразователя ток-напряжение 5. Полученные значения напряжений и токов через нормирующие устройства 6 поступают на соответствующие входы суммирующего усилителя 7, на выходе которого формируется разностный сигнал (см, фиг. 3,а).
ЕфМ (Uu(t) - и((т)Кф(т),
где Кф(г) - коэффициент усиления сумматора 7, Ои(т.)и Ui(t)- нормированные величины измеренных значений (мгновенных) на-, пряжения и тока соответственно. Каждый из которых получают на выходе соответствующего нормирующего устройства, реализованного, например на основе использования двухтактной схемы включения МДП-транзисторов.
Кроме того, в схеме нормирующего блока коэффициент передачи уменьшается начиная от самых малых входных сигналов, а не от заданного номинального значения, как это имеет место в управляемых ограничителях. Это позволяет нормировать измеряемые значения тока и напряжения в каждой фазе на основе использования сжимающих отображений их амплитудных значений, а именно, для гармонических:
Uu(t) Au(t) sin cot и Ui(t) Ai(t)sin(cot );
обеспечивая Au(t) Al(t) A(t) для всех t О, а это позволяет получить на выходе суммирующего усилителя 7 гармонический сигнал следующего вида: e(t) 2Аз1п(Ф/2) х xcos(a t - Ф/2), т.е. получаем нормированные разности входных значений токов и напряжений соответствующих фаз (см, фиг. 2,6).
Сигнал нормированной разности e(t) поступает на вход функционального преобразователя 8, работа этого блока может быть описана следующими соотношениями
ф|
+ 1, при |e(t)l m(t);
Ф(М), при |е (т)I G Im (t) - n, m (t)l;
О, при le(t)l m (t)- n;
где
m(t) KJ| E(t)dt + n, ч - 1
ti - t(i-i) - кратна частоте изменения сетевого напряжения, при этом кратность этой длительности устанавливают 1/(Kp fc), коэффициент кратности Кр можно выбрать, например, на основе использо- вания теоремы отсчета непрерывных сигналов в дискретном представлении 2.
Процесс формирования выходного сиг- нала функционального преобразователя проиллюстрирован на фиг. 3,в. При этом на фиг. 3,г показаны моменты формирования импульсных сигналов на выходе формирователя импульсов 13. а на фиг. 3,а заштрихована соответствующая область открытого состояния тиристоров коммутатора 1.
Как видно из приведенных соотношений для случая dE(t)/dt 0, за счет запоми- нания предшествующего состояния выходной величины релейного элемента Ерэ(М), для всех Е(т) G(-a1, а1). где I2a1 lЈ& - величина требуемой (заданной) точности отработки ПЗВ, устраняется возможность потери информации о сигнале ошибки, что поясняет эффект повышения точности отработки ПЗВ в режиме отработки малых изме- нений E(t) без необходимости вычислять производную от изменения сигнала ошибки. При этом угол проводимости тиристоров в каждой фазе будет функционально связан с текущими значениями основных показате- лей качества отработки программно-задающих воздействий.
Степень функциональных связей можно раздельно установить для каждого канала управления как перед включением в работу устройства управления, так и непосредственно во время обработки, например, каждой ступеньки программно-задающих воздействий. Вышеописанные возможности во многих практически важных случаях
0
5
0
5
о 5
программного управления электроприводами, с точки зрения упрощения процесса настройки и оптимизации режимов регулирования (плавности переходных процессов при пуске за счет уменьшения интенсивности электромагнитных процессов), выгодно отличают данный способ и устройство от известных технических решений. Формула изобретения 1. Способ управления электродвигателем с вентильным преобразователем, при котором измеряют частоту вращения электродвигателя, фазные токи и напряжения и подают управляющие импульсы на соответствующие ключи преобразователя в определенной последовательности для подключения электродвигателя к источнику питания, отличающийся тем, что, с целью повышения качества регулирования, преобразуют измеренные фазные токи в напряжения, нормируют измеренные напряжения и напряжения, полученные в результате указанного преобразования фазных токов, сравнивают их мгновенные значения между собой и определяют их разность e(t), одновременно сравнивают измеренное значение частоты вращения электродвигателя с заданным дискретным программно-задающим воздействием, формируют дискретное значение ошибки E(t) по частоте вращения, а управляющие импульсы подают в момент времени, определяемый по следующей зависимости:
Ф
+ 1, при |e(t)l m (t);
Ф(И), при I e (t) I G I m (t) - n, m (t) I.
О, при le(t)l m (t)- n;
где m
ti. (t) К / E(t)d(t) + n - пропорциональti - 1
но-интегральная составляющая ошибки по частоте вращения, Кип- постоянные коэффициенты, (ti - ты) - интервал времени, кратный частоте изменения сетевого напряжения.
качества регулирования, введены релейный элемент с регулируемой петлей гистерезиса, умножитель частоты, управляемый квантователь, времязадающая схема, а в каждый канал управления - триггер, суммирующий усилитель, инвертирующий усилитель, преобразователь ток-напряжение, две схемы двухтактного включения управляемых ключей, выполненных в виде последовательно соединенных входного усилителя, управля- емых полевых транзисторов и выходного усилителя, выход которого через усилитель обратной связи и выпрямитель соединён с затвором управляемых полевых транзисторов, и последовательно соединенные трех- позиционный релейный элемент, линейный ключ и дифференцирующая схема, выход которой соединен с входом формирователя импульсов, второй вход дифференцирующей схемы соединен с выходом триггера, один вход которого соединен с управляющим входом линейного ключа и выходом релейного, элемента с регулируемой петлей гистерезиса, а второй вход - с выходом за- датчика тактовой частоты, информацион-
Ј
Га
L/C
ный вход трехпозиционного релейного элемента соединен с выходом суммирующего усилителя, первый вход которого через первую схему двухтактного включения управляемых ключей соединен с выходом датчика напряжения, а второй вход - через вторую схему двухтактного включения управляемых ключей и преобразователь ток-напряжение с выходом датчика тока, выход управляемого квантователя соединен через инвертирующий усилитель с первым управляющим входом трехпозиционного релейного элемента каждого канала управления, вторые управляющие входы которых объединены и соединены с выходом управляемого квантователя, информационный вход которого объединен с входом релейного элемента с регулируемой петлей гистерезиса и соединен с выходом сумматора, вход Сброс управляемого квантователя соединен через времязадающую схему с выходом программно-задающего блока, а управляющие входы соединены с выходами умножителя частоты, вход которого соединен с выходом задатчика тактовой частоты.
На бы. Вентмей
L 13
LLi:: Jl
a
0-X-5
eli)
m(t) mH)-n
-m(t)
.Ur.U
-Uu(t)
unt)
| Устройство для управления углом отпирания вентилей | 1985 |
|
SU1319181A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматизированный- электропривод/Под ред | |||
| Н.Ф | |||
| Ильинского | |||
| - М.: Энер- гоиздат, 1980., с | |||
| Крутильный аппарат | 1922 |
|
SU234A1 |
| Г | |||
