Изобретение относится к средствам передвижения, а более точно касается устройств для самовытаскивания транспортного сродства. Изобретение может применяться в машинах на гусеничном ходу, например в гусеничных тягачах, в тракторах, а также в машинах, управляемых дистанционно.
Целью изобретения является повышение эффективности использования устройства за счет многократного его применения.
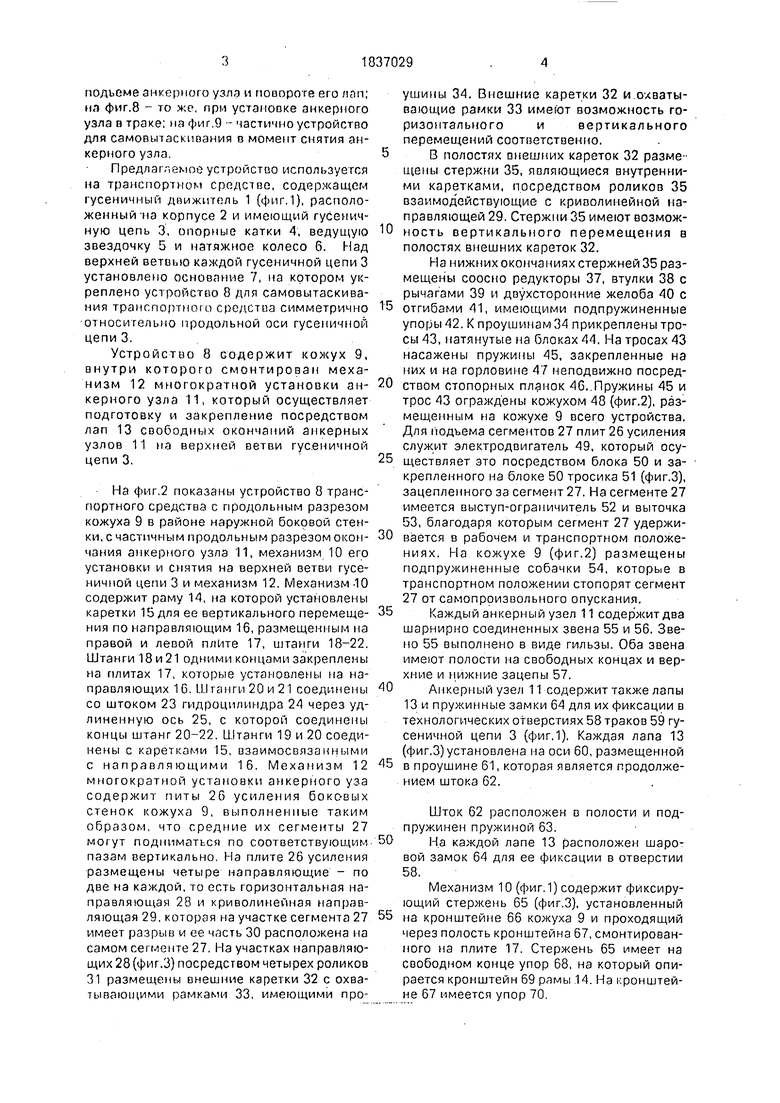
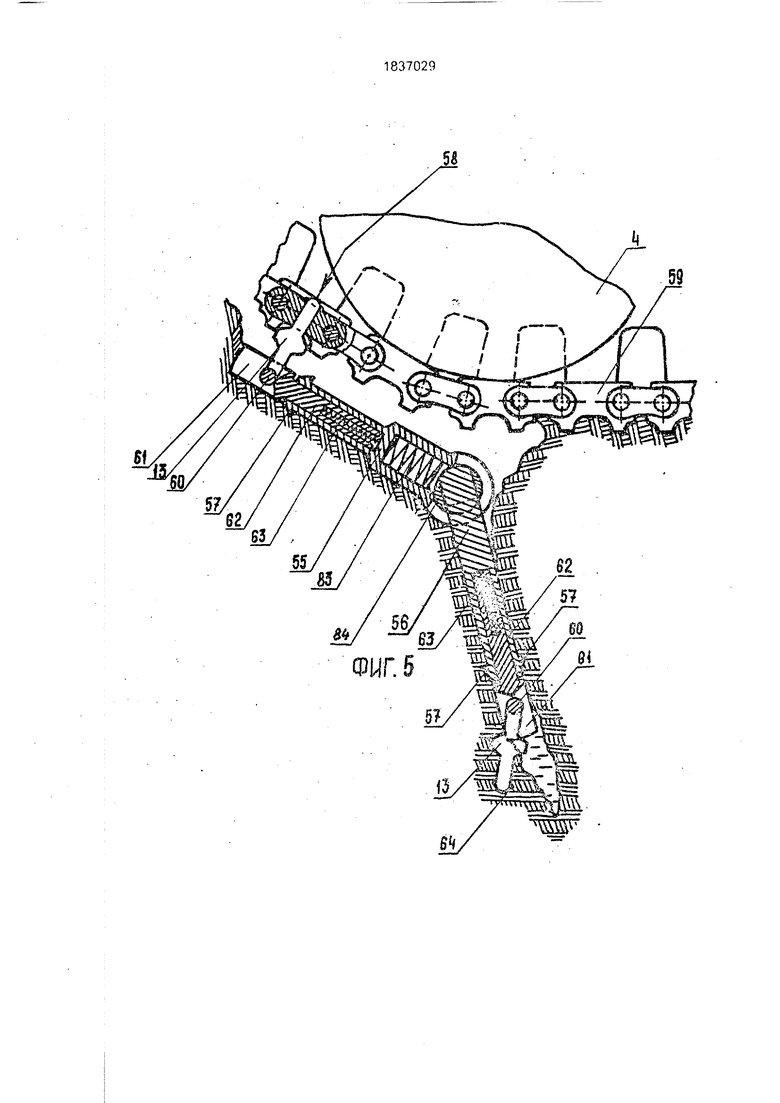
На фиг,1 изображен общий вид устройства для самовытаскивания транспортного средства; на фиг.2 - то же, разрез; на фиг.З - механизм для многократной установки анкерного узла, общий вид; на фиг.4 - анкерный узел а рабочем состоянии, продольный разрез; на фиг.5 - то же, в момент извлечения из грунта; на фиг.6 - механизм многократной установки анкерного узла в момент опускания последнего; на фиг.7 - то же. при
со
OJ
vj
О
ю ю
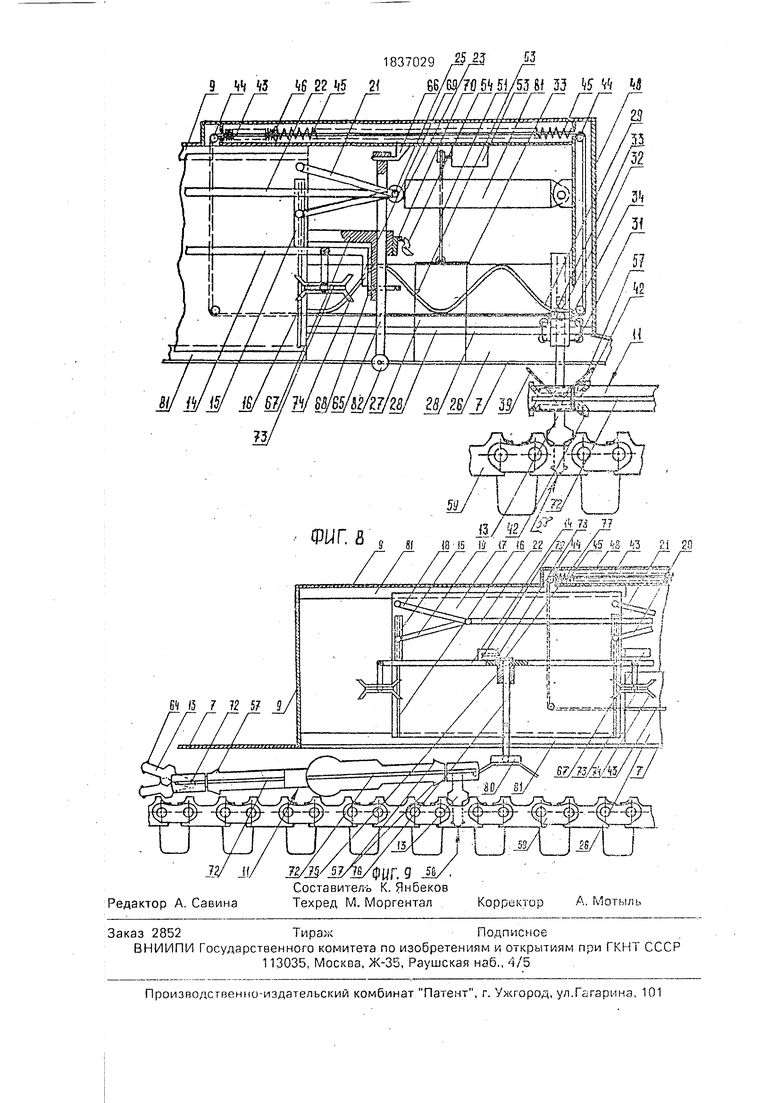
подъеме анкерного узлэ и повороте его лап; на фиг.8 то же, при установке анкерного узла в траке; на фиг.9 - частично устройство для самовытаскивания в момент снятия анкерного узла.
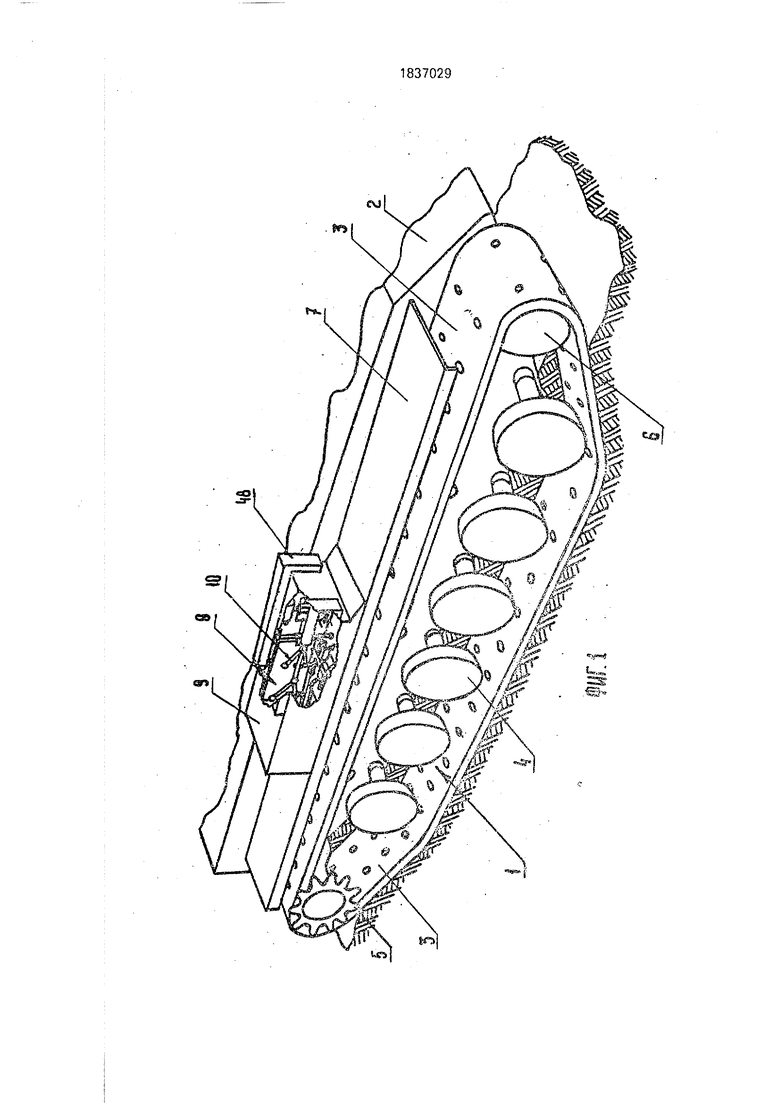
Предлагаемое устройство используется на транспортном средстве, содержащем гусеничный движитель 1 (фиг.1), расположенный на корпусе 2 и имеющий гусеничную цепь 3, опорные катки 4, ведущую звездочку 5 и натяжное колесо 6. Над верхней ветвью каждой гусеничной цепи 3 установлено основание 7, на котором укреплено устройство 8 для самовытаскивания транспортного средства симметрично относительно продольной оси гусеничной цепи 3.
Устройство 8 содержит кожух 9, внутри которого смонтирован механизм 12 многократной установки анкерного узла 11, который осуществляет подготовку и закрепление посредством лап 13 свободных окончаний анкерных узлов 11 па верхней ветви гусеничной цепи 3.
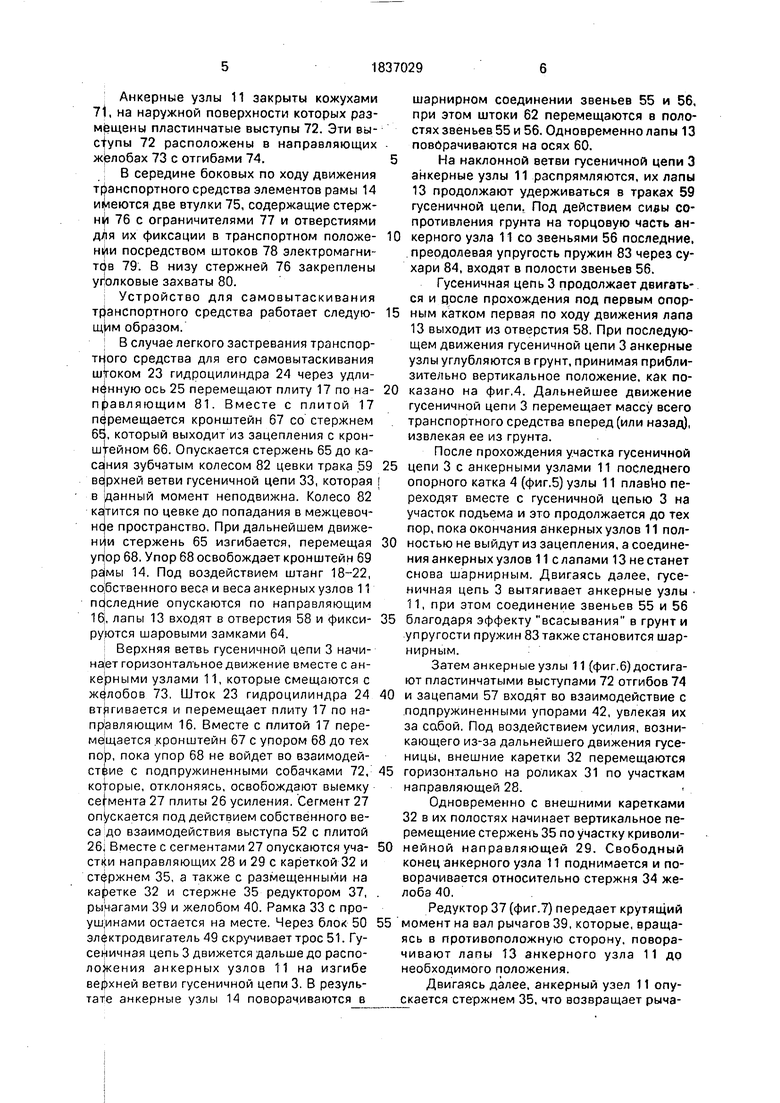
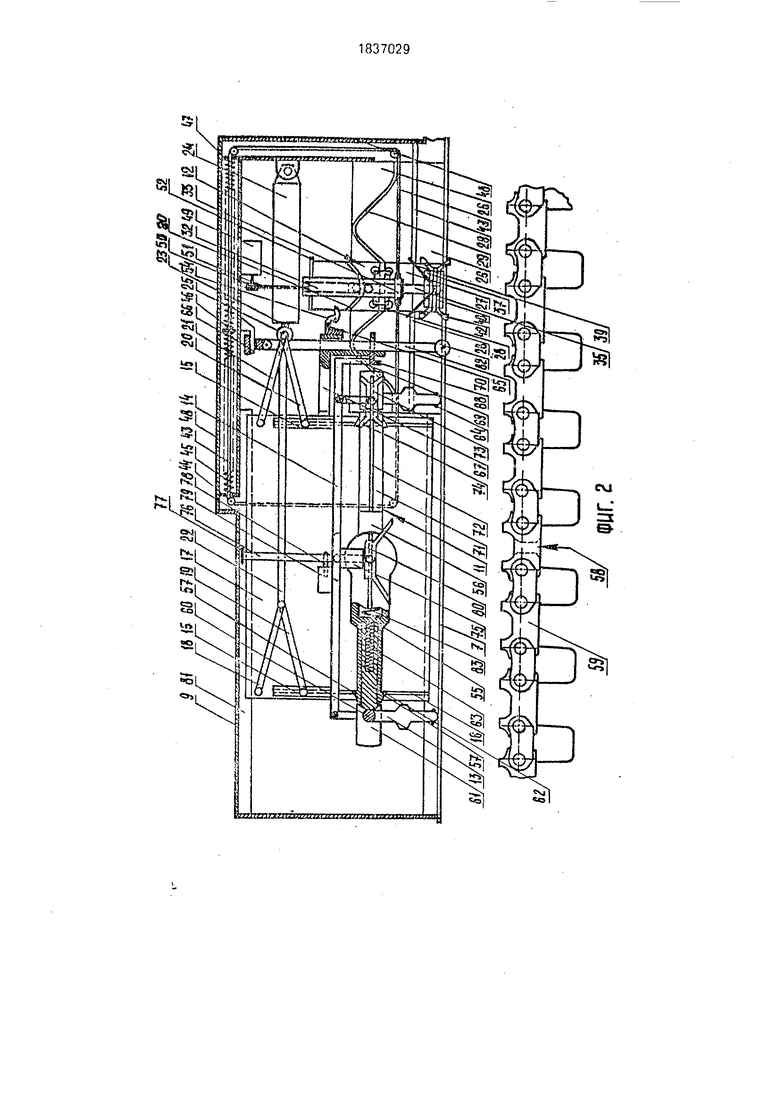
На фиг.2 показаны устройство 0 транспортного средства с продольным разрезом кожуха 9 в районе наружной боковой стенки, с частичным продольным разрезом окончания анкерного узлэ 11, механизм 10 его установки и снятия на верхней ветви гусеничной цепи 3 и механизм 12. Механизм 10 содержит раму 14, на которой установлены каретки 15 для ее вертикального перемещения по направляющим 16, размещенным на правой и левой плите 17, штанги 18-22. Штанги 18 и21 одними концами закреплены на плитах 17, которые установлены на направляющих 16. Штанги 20 и 21 соединены со штоком 23 гидроцилиндра 24 через удлиненную ось 25, с которой соединены концы штанг 20-22. Штанги 19 и 20 соединены с каретками 15, взаимосвязанными с направляющими 16. Механизм 12 многократной установки анкерного уза содержит питы 26 усиления боковых стенок кожуха 9, выполненные таким образом, что средние их сегменты 27 могут подниматься по соответствующим пазам вертикально. На плите 26 усиления размещены четыре направляющие - по две на каждой, то есть горизонтальная направляющая 28 и криволинейная направляющая 29, которая на участке сегмента 27 имеет разрыв и ее часть 30 расположена на самом сегменте 27. На участках направляющих 28 (фиг.З) посредством четырех роликов 31 размещены внешние каретки 32 с охватывающими рамками 33, имеющими проушины 34. Внешние каретки 32 и.охватывающие рамки 33 имеют возможность горизонтального и вертикального перемещений соответственно. В полостях внешних кареток 32 размещены стержни 35, являющиеся внутренними каретками, посредством роликов 35 взаимодействующие с криволинейной направляющей 29. Стержни 35 имеют возмож
ность вертикального перемещения в
полостях внешних кареток 32.
На нижних окончаниях стержней 35 размещены соосно редукторы 37, втулки 38 с рычагами 39 и двухсторонние желоба 40 с
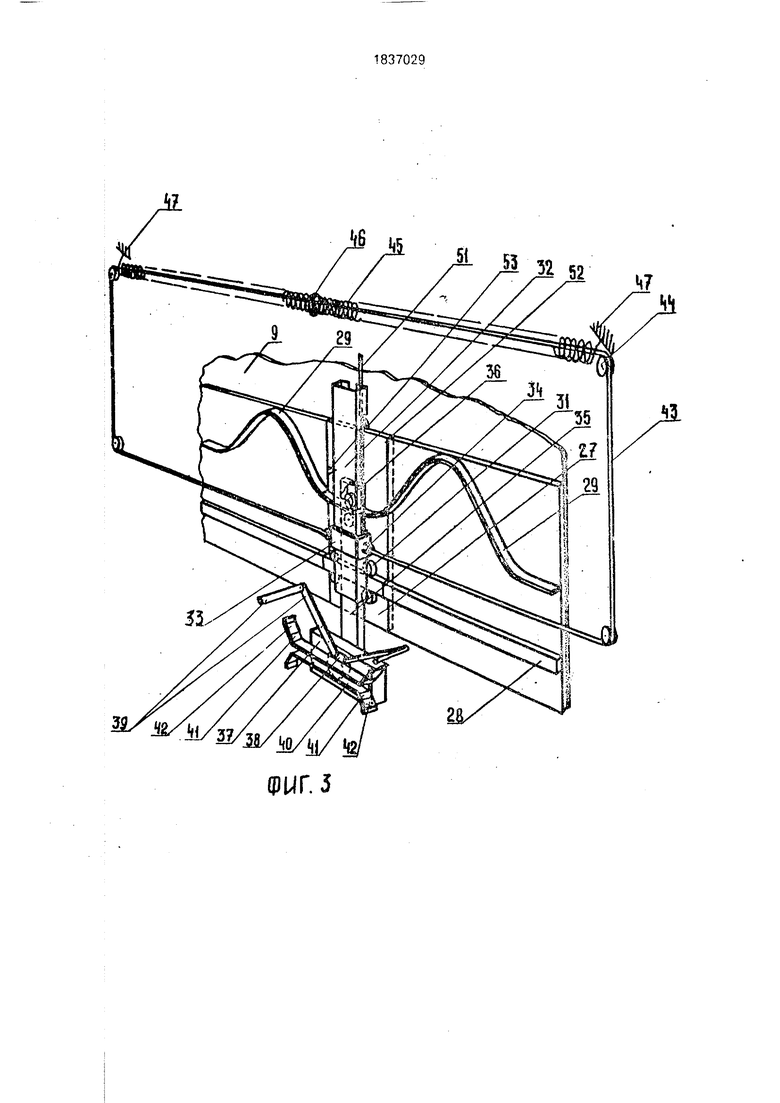
отгибами 41, имеющими подпружиненные упоры 42. К проушинам 34 прикреплены тросы 43, натянутые на блоках 44. На тросах 43 насажены пружины 45, закрепленные на них и на горловине 47 неподвижно посредством стопорных планок 46..Пружины 45 и трос 43 ограждены кожухом 48 (фиг.2), размещенным на кожухе 9 всего устройства. Для подъема сегментов 27 плит 26 усиления служит электродвигатель 49, который осуществляет это посредством блока 50 и закрепленного на блоке 50 тросика 51 (фиг.З), зацепленного за сегмент 27. На сегменте 27 имеется выступ-ограничитель 52 и выточка 53, благодаря которым сегмент 27 удерживается в рабочем и транспортном положениях. На кожухе 9 (фиг.2) размещены подпружиненные собачки 54, которые в транспортном положении стопорят сегмент 27 от самопроизвольного опускания.
Каждый анкерный узел 11 содержит два
шарнирно соединенных звена 55 и 56. Звено 55 выполнено в виде гильзы. Оба звена имеют полости на свободных концах и верхние и нижние зацепы 57.
Анкерный узел 11 содержит также лапы 13 и пружинные замки 64 для их фиксации в технологических отверстиях 58 траков 59 гусеничной цепи 3 (фиг.1), Каждая лапа 13 (фиг.З) установлена на оси 60, размещенной
в проушине 61, которая является продолжением штока 62.
Шток 62 расположен в полости и подпружинен пружиной 63.
На каждой лапе 13 расположен шаровой замок 64 для ее фиксации в отверстии 58.
Механизм 10 (фиг.1) содержит фиксирующий стержень 65 (фиг.З), установленный
на кронштейне 66 кожуха 9 и проходящий через полость кронштейна 67, смонтированного на плите 17. Стержень 65 имеет на свободном конце упор 68, на который опирается кронштейн 69 рамы .14. На кронштейне 67 имеется упор 70.
Анкерные узлы 11 закрыты кожухами 71, на наружной поверхности которых раз- пластинчатые выступы 72. Эти вы- с|упы 72 расположены в направляющих жалобах 73 с отгибами 74.
В середине боковых по ходу движения транспортного средства элементов рамы 14 имеются две втулки 75, содержащие стерж- 76 с ограничителями 77 и отверстиями их фиксации в транспортном положе- HtfiH посредством штоков 78 электромагни- тйв 79. В низу стержней 76 закреплены угрлковые захваты 80.
Устройство для самовытаскивания транспортного средства работает следую- образом.
В случае легкого застревания транспор- средства для его самовытаскивания штоком 23 гидроцилиндра 24 через удлиненную ось 25 перемещают плиту 17 по на- правляющим 81. Вместе с плитой 17 перемещается кронштейн 67 со стержнем 6Е,который выходит из зацепления с кронштейном 66. Опускается стержень 65 до касания зубчатым колесом 82 цевки трака 59 верхней ветви гусеничной цепи 33, которая в данный момент неподвижна. Колесо 82 катится по цевке до попадания в межцевоч- нсе пространство. При дальнейшем движении стержень 65 изгибается, перемещая упор 68. Упор 68 освобождает кронштейн 69 ра|мы 14. Под воздействием штанг 18-22, собственного веса и веса анкерных узлов 11 последние опускаются по направляющим 16J, лапы 13 входят в отверстия 58 и фикси- шаровыми замками 64.
Верхняя ветвь гусеничной цепи 3 начинает горизонтальное движение вместе с анкерными узлами 11, которые смещаются с желобов 73, Шток 23 гидроцилиндра 24 втягивается и перемещает плиту 17 по направляющим 16. Вместе с плитой 17 пере- ме|щается кронштейн 67 с упором 68 до тех nob, пока упор 68 не войдет во взаимодей- стрие с подпружиненными собачками 72, которые, отклоняясь, освобождают выемку сегмента 27 плиты 26 усиления. Сегмент 27 опускается под действием собственного веса до взаимодействия выступа 52 с плитой 26 Вместе с сегментами 27 опускаются уча- стйи направляющих 28 и 29 с кареткой 32 и стержнем 35, а также с размещенными на каретке 32 и стержне 35 редуктором 37, рычагами 39 и желобом 40. Рамка 33 с про- уш;инами остается на месте. Через блок 50 электродвигатель 49 скручивает трос 51. Гу- се$ичная цепь 3 движется дальше до распо- ло|кения анкерных узлов 11 на изгибе верхней ветви гусеничной цепи 3. В результате анкерные узлы 14 поворачиваются в
шарнирном соединении звеньев 55 и 56, при этом штоки 62 перемещаются в полостях звеньев 55 и 56. Одновременно лапы 13 поворачиваются на осях 60.
На наклонной ветви гусеничной цепи 3 анкерные узлы 11 распрямляются, их лапы 13 продолжают удерживаться в траках 59 гусеничной цепи, Под действием сивы сопротивления грунта на торцовую часть анкерного узла 11 со звеньями 56 последние, преодолевая упругость пружин 83 через сухари 84, входят в полости звеньев 56.
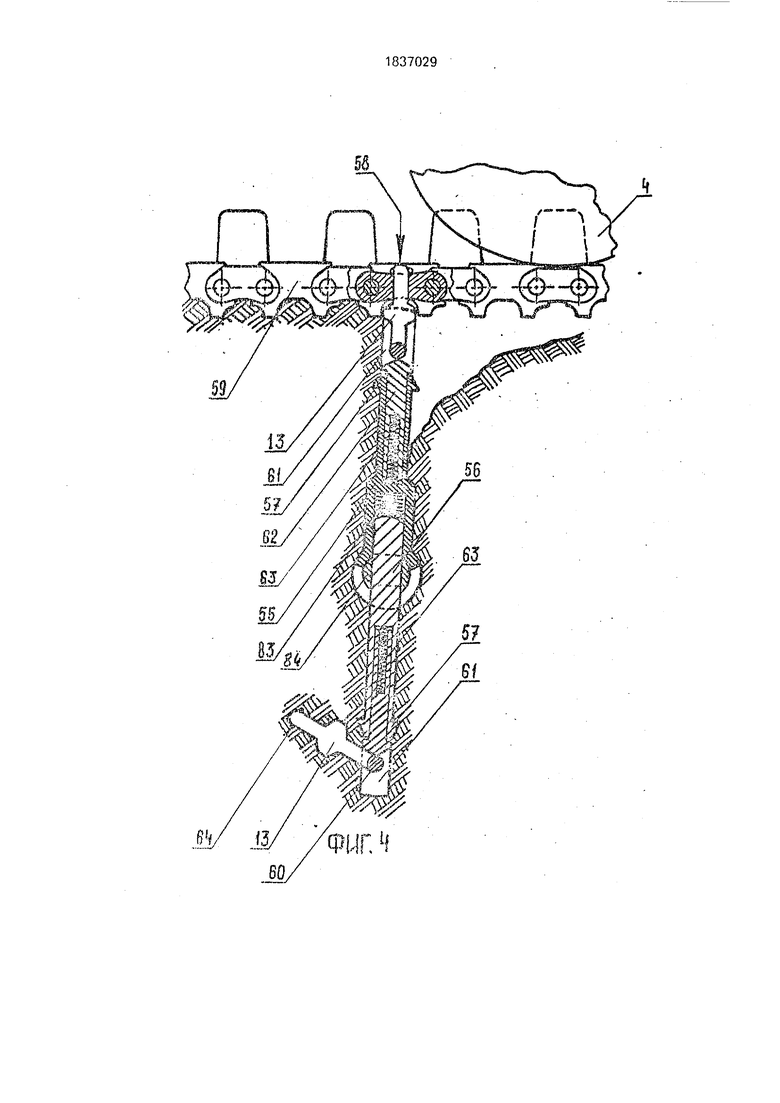
Гусеничная цепь 3 продолжает двигаться и щосле прохождения под первым опорным катком первая по ходу движения лапа 13 выходит из отверстия 58, При последующем движения гусеничной цепи 3 анкерные узлы углубляются в грунт, принимая приблизительно вертикальное положение, как показано на фиг.4. Дальнейшее движение гусеничной цепи 3 перемещает массу всего транспортного средства вперед (или назад), извлекая ее из грунта.
После прохождения участка гусеничной цепи 3 с анкерными узлами 11 последнего опорного катка 4 (фиг.5) узлы 11 плавно переходят вместе с гусеничной цепью 3 на участок подъема и это продолжается до тех пор, пока окончания анкерных узлов 11 полностью не выйдут из зацепления, а соединения анкерных узлов 11 с лапами 13 не станет снова шарнирным. Двигаясь далее, гусеничная цепь 3 вытягивает анкерные узлы 11, при этом соединение звеньев 55 и 56 благодаря эффекту всасывания в грунт и упругости пружин 83 также становится шарнирным.
Затем анкерные узлы 11 (фиг.6) достигают пластинчатыми выступами 72 отгибов 74 и зацепами 57 входят во взаимодействие с .подпружиненными упорами 42, увлекая их за сабой, Под воздействием усилия, возникающего из-за дальнейшего движения гусеницы, внешние каретки 32 перемещаются горизонтально на роликах 31 по участкам направляющей 28.
Одновременно с внешними каретками 32 в их полостях начинает вертикальное перемещение стержень 35 по участку криволинейной направляющей 29. Свободный конец анкерного узла 11 поднимается и поворачивается относительно стержня 34 желоба 40,
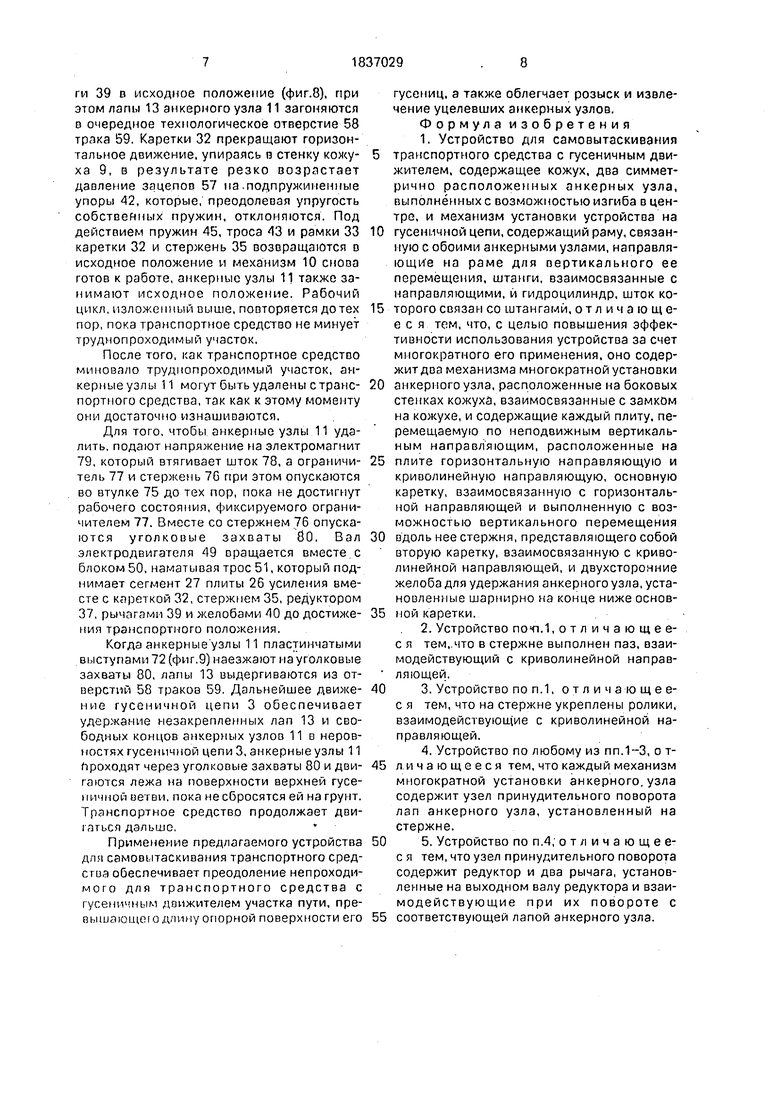
Редуктор 37 (фиг.7) передает крутящий момент на вал рычагов 39, которые, вращаясь в противоположную сторону, поворачивают лапы 13 анкерного узла 11 до необходимого положения.
Двигаясь далее, анкерный узел 11 опускается стержнем 35, что возвращает рычаги 39 в исходное положение (фиг.8), при этом лапы 13 анкерного узла 11 загоняются в очередное технологическое отверстие 58 трака 59. Каретки 32 прекращают горизонтальное движение, упираясь в стенку кожуха 9, в результате резко возрастает давление зацепов 57 на-подпружиненные упоры 42, которые, преодолевая упругость собственных пружин, отклоняются. Под действием пружин 45, троса 43 и рамки 33 каретки 32 и стержень 35 возвращаются о исходное положение и механизм 10 снова готов к работе, анкерные узлы 11 также занимают исходное положение. Рабочий цикл, изложенный выше, повторяется до тех пор, пока транспортное средство не минует труднопроходимый участок,
После того, как транспортное средство миновало труднопроходимый участок, анкерные узлы 11 могут быть удалены странс- портного средства, так как к этому моменту они достаточно изнашиваются.
Для того, чтобы анкерные узлы 11 удалить, подают напряжение на электромагнит 79, который втягивает шток 78, а ограничитель 77 и стержень 76 при этом опускаются во втулке 75 до тех пор, пока не достигнут рабочего состояния, фиксируемого ограничителем 77. Вместе со стержнем 76 опускаются уголковые захваты 80, Вал электродвигателя 49 вращается вместе, с блоком 50, наматывал трос 51, который поднимает сегмент 27 плиты 26 усиления вместе с кареткой 32, стержнем 35, редуктором 37, рычагами 39 и желобами 40 до достижения транспортного положения.
Когда анкерные узлы 11 пластинчатыми выступами 72 (фиг.9) наезжают на уголковые захваты 80, лапы 13 выдергиваются из отверстий 58 траков 59. Дальнейшее движение гусеничной цепи 3 обеспечивает удержание незакрепленных лап 13 и свободных концов анкерных узлов 11 в неровностях гусеничной цепи 3, анкерные узлы 11 гфоходят через уголковые захваты 80 и двигаются лежа на поверхности верхней гусеничной ветви, пока не сбросятся ей на грунт. Транспортное средство продолжает двигаться дальше.
Применение предлагаемого устройства для самовытаскивания транспортного средства обеспечивает преодоление непроходи- мого для транспортного средства с гусеничным движителем участка пути, превышающего длину опорной поверхности его
гусениц, а также облегчает розыск и извлечение уцелевших анкерных узлов. Формула изобретения
1.Устройство для самовытаскиванил транспортного средства с гусеничным движителем, содержащее кожух, два симметрично расположенных анкерных узла, выполненных с возможностью изгиба в центре, и механизм установки устройства на
гусеничной цепи, содержащий раму, связанную с обоими анкерными узлами, направляющее на раме для вертикального ее перемещения, штанги, взаимосвязанные с направляющими, и гидроцилиндр, шток которого связан со штангами, отличающееся тем, что, с целью повышения эффективности использования устройства за счет многократного его применения, оно содержит два механизма многократной установки
анкерного узла, расположенные на боковых стенках кожуха, взаимосвязанные с замком на кожухе, и содержащие каждый плиту, перемещаемую по неподвижным вертикальным направляющим, расположенные на
плите горизонтальную направляющую и криволинейную направляющую, основную каретку, взаимосвязанную с горизонтальной направляющей и выполненную с возможностью вертикального перемещения
вдоль нее стержня, представляющего собой вторую каретку, взаимосвязанную с криволинейной направляющей, и двухсторонние желоба для удержания анкерного узла, установленные шарнирно на конце ниже основной каретки.
2.Устройство поть1, о т л и ч а ю щ е е- с л тем,.что в стержне выполнен паз, взаимодействующий с криволинейной направ ляюицей.
3. Устройство по п.1, отличающее- с я тем, что на стержне укреплены ролики, взаимодействующие с криволинейной направляющей.
4. Устройство по любому из пп.1-3, о тл.и ч а ю щ е е с я тем, что каждый механизм многократной установки анкерного.узла содержит узел принудительного поворота лап анкерного узла, установленный на стержне.
5. Устройство по п.4, отличающее-: с я тем, что узел принудительного поворота содержит редуктор и два рычага, установленные на выходном валу редуктора и взаимодействующие при их повороте с
соответствующей лапой анкерного узла.
er
Оэ СМ
о
Гго
СС
2 Ш
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство с гусеничным движителем | 1990 |
|
SU1729890A1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2037446C1 |
| УСТРОЙСТВО ДЛЯ САМОВЫТАСКИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ГУСЕНИЧНЫМ ДВИЖИТЕЛЕМ | 1993 |
|
RU2037447C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2008 |
|
RU2365916C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2013 |
|
RU2540432C1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ КОЛЕСНОГО ТРАКТОРА | 2011 |
|
RU2484977C1 |
| УСТАНОВКА ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ СО ДНА ОКЕАНА | 2005 |
|
RU2289696C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2003 |
|
RU2236673C1 |
| ВЫСОКОУНИВЕРСАЛИЗИРОВАННАЯ ХОДОВАЯ ЧАСТЬ СОВРЕМЕННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1996 |
|
RU2123432C1 |

) Изобретение относится к средствам передвижения. Сущность изобретения: устройство содержит кожух, два симметрично расположенных анкерных узла, выполненных с возможностью изгиба в центре, меха- ни|зм установки устройства на гусеничной цепи и два механизма многократной установки анкерного узла, расположенные на боковых стенках кожуха и взаимосвязанные с замком на кожухе. Механизм установки устройства на гусеничной цепи содержит раму, связанную с обоими анкерными.узлами, направляющие на раме для вертикального ее перемещения, штанги,, взаимосвязанные с направляющими, и гидроцилиндр, шток которого связан со штангами, а каждый механизм многократной установки содержит плиту, перемещаемую по неподвижным вертикальным направляющим, расположенные на плите горизонтальную направляющую и криволинейную направляющую, основную каретку, взаимосвязанную с горизонтальной направляющей и выполненную с возможностью вертикального перемещения вдоль нее стержня, являющегося второй кареткой, взаимосвязанной с криволинейной направляющей, и двухсторонние салазки для удержания анкерного узла, установленные шарнирно на конце стержня ниже основной кареГки. 4 з.п. ф-лы, 9 ил. СО с
& Kiitt/towiyiss KM я ып&ямшзуъйвию&я юб
IS 08SS&tl
ФИГ.З
32 52
Ц7
59
61 W tf I Я 2f ДО /Ю / /M 5//5352 35 К Ц f
Tfff гг г1 шЈггггг
1ЈiiYiT jA / TC7Si U( X
iSff Л2 Д2| 20 W/25ЙЙ iiJfiJ4 Ж15й I
2
ҐШШг/7П // /
ФПГ. 7
SS S3 2550 W
2J50
IV Jf, Редактор А. Савина
тг/1§/м™/№.9 -is/Составител-ь К. Янбеков
Техред М. Моргентал . Корректор А. Мотыль
| Авторское свидетельство СССР N51889487, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Катунский A.M | |||
| Вождение танков, М.: Во|ениздат, 1976, с.148-155 | |||
| Многоцелевой тягач тяжелый МТТ | |||
| Руководство по эксплуатации | |||
| М.: Изд-во МО CCfCP, 1961.C.252 | |||
| I Авторское свидетельство СССР №1772912, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| i Авторское свидетельство СССР №11729890, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Ы) УСТРОЙСТВО ДЛЯ САМОВЫТАСКИ- В/|НИЯ ТРАНСПОРТНОГО СРЕДСТВА С ГУСЕНИЧНЫМ ДВИЖИТЕЛЕМ | |||
