ют летательный аппарат на палубу и освобождают захват 26 от каната, во время посадки автоматически стабилизируют пространственное положение каната в условиях качки и изменения курса кррабля, посадочную скорость и высоту полета летательного аппарата снижают путем разворота его на величину угла атаки, обеспечивающего уравновешивание веса аппарата тягой двигателя и аэродинамической подъемной силой, а в момент захвата каната двигатели отключают, для чего каждый из кранов 2 установлен на поворотной платформе б, управляемой гидроцилиндрами 18 и 20, стрелы выполнены независимо раздвижными, а устройство с захватом 26 на летательном аппарате установлено в продольной плоскости носовой части фюзеляжа. 2 с. и 3 з.п, ф-лы, 7 ил.
Изобретение относится к авиационной технике, а именно, к посадке летательных аппаратов, и касается способа и системы посадки пилотируемого летательного аппарата на авианесущий корабль. Целью изобретения является повышение боевой эффективности боевого применения и безопасности посадки. В способе посадки, согласно которому перед посадкой приводят на корабле в рабочее положение причальное устройство в виде двух стреловых кранов 2 с закрепленным канатом между стрелами, а на летательном аппарате 1 выпускают устройство с захватом 26 для сцепления его с канатом, снижают высоту и скорость полета летательного аппарата до уровня, обеспечивающего сцепление захвата 26 с канатом, захватывают канат, опуска26 27 00 CJ XJ О СО 00 77
. Изобретение относится к авиационной технике, а именно к посадке летательных аппаратов, и касается способа и системы посадки пилотируемого летательного аппарата на авианесущий корабль.
Целью изобретения является повышение эффективности боевого применения и безопасности посадки.
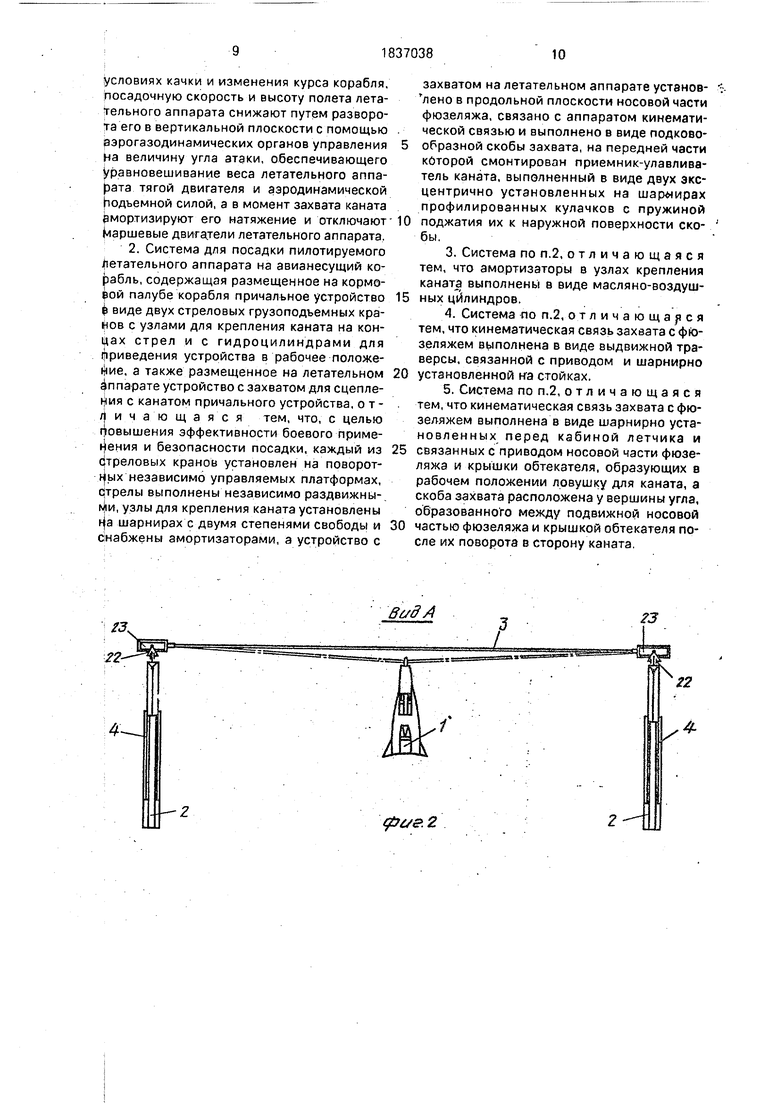
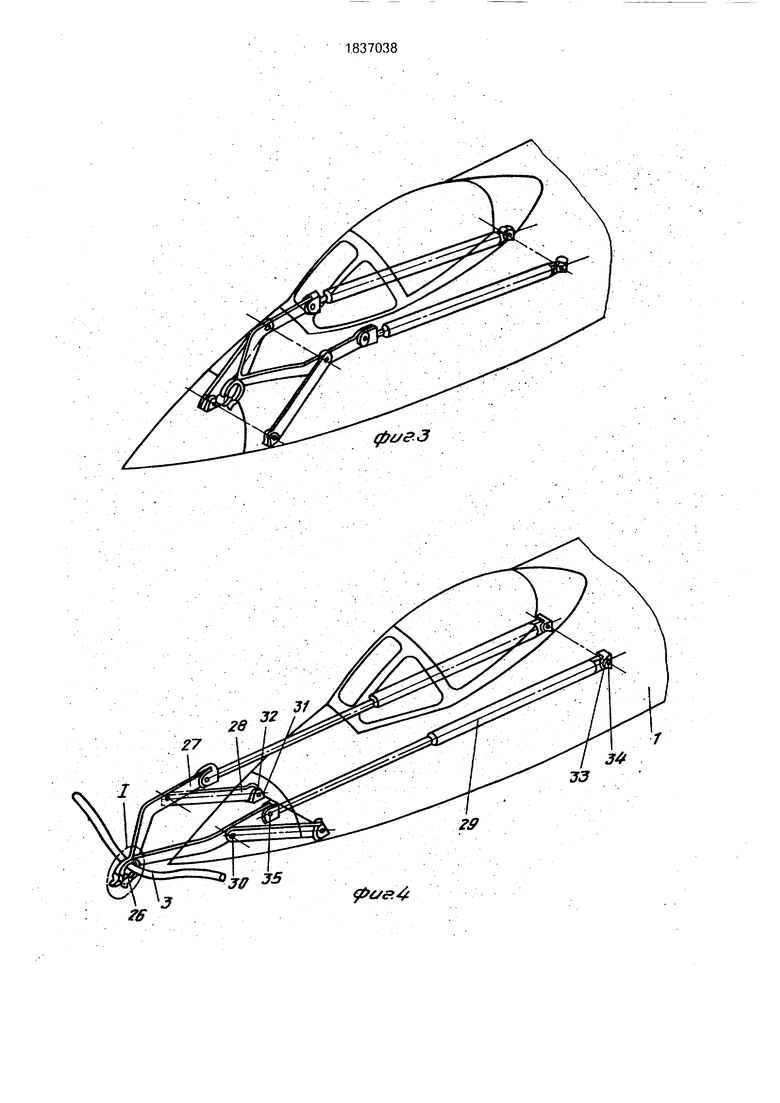
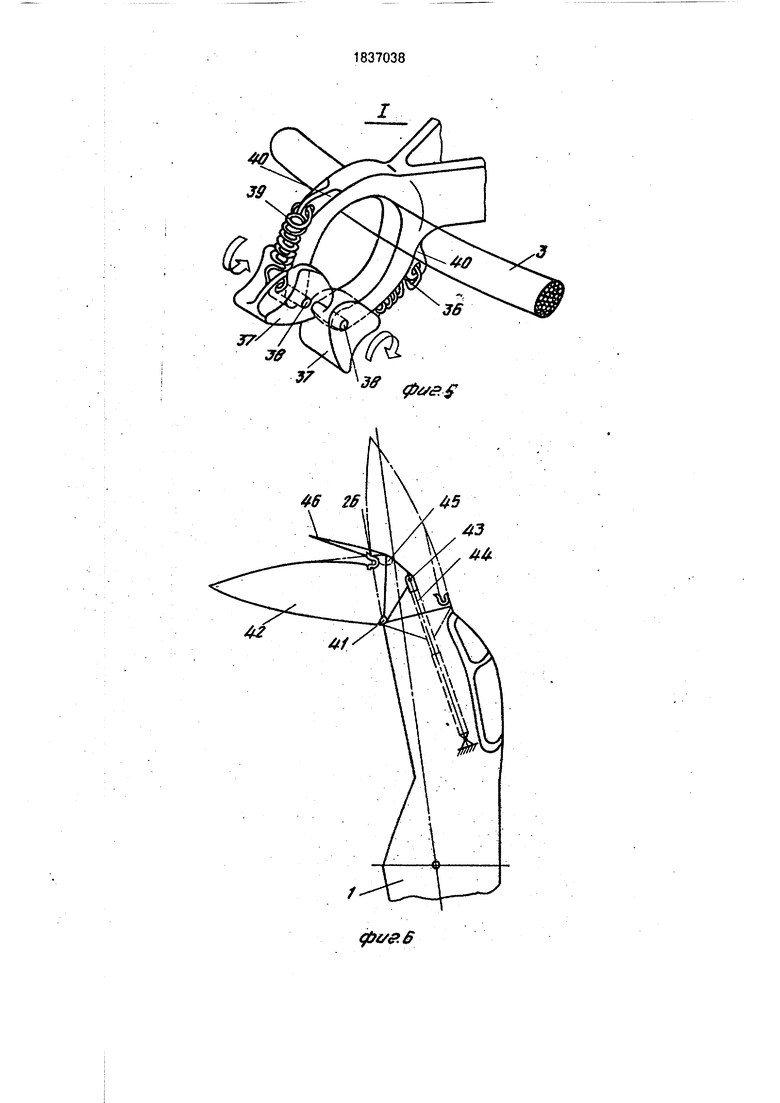
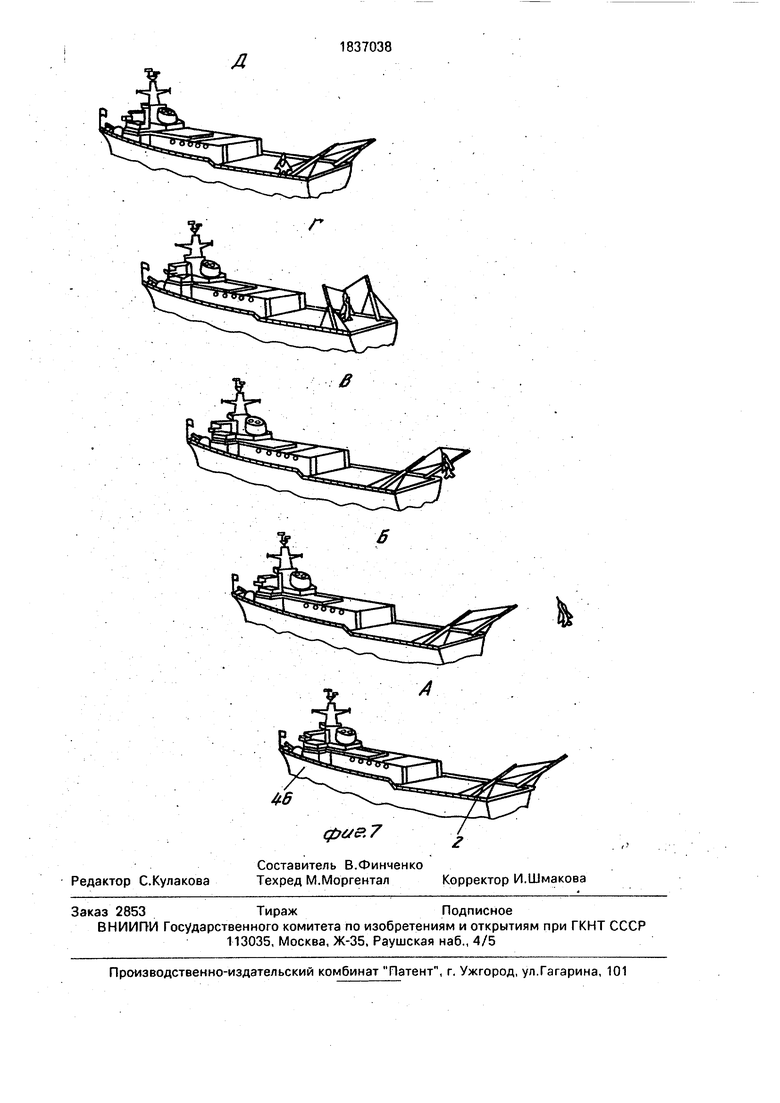
На фиг.1 приведен схематический вид системы в момент захвата летательным аппаратом каната причального устройства; на фиг.2 - вид А на фиг.1; на фиг.З - схема устройства с захватом, установленного на летательном аппарате в убранном положении; на фиг.4 - то же, в выпущенном положении; на фиг.5.- узел I на фиг.4; на фиг.6 - схема устройства кинематической связи захвата с летательным аппаратом; на фиг.7 показаны этапы осуществления способа посадки летательного аппарата на корабль.
Система для посадки летательного аппарата 1 на корабль содержит причальное устройство, размещаемое на кормовой палубе корабля, и размещаемое на летательном аппарате устройство для соединения с причальным устройством при посадке.
Причальное устройство состоит из двух одинаковых стреловых грузоподъемных кранов 2, расположенных симметрично на некотором расстоянии друг от друга, исключающем повреждение планера летательного аппарата.при посадке и последующей транспортировке на место стоянки или хра- нения,и соединенных между собой натянутым канатом 3.
Стрелы грузоподъемных кранов независимо друг от друга обладают возможностью вращения в параллельных плоскостях, расположенных относительно друг друга на расстоянии длины каната 3. Каждый грузоподъемный кран 2 состоит из выдвижной телескопической стрелы 4, установленной с помощью шарнирной опоры 5 на поворотной платформе 6, которая крепится к конструкции корабля с помощью шарнирной опоры 7. Стрелы 4, поворотные платформы 6 могут независимо друг от друга поворачиваться в одной плоскости относительно параллельных осей вращения, проходящих через опоры 5 и 7 перпендикулярно к этой плоскости. Выдвижная телескопическая стрела 4 выполнена в виде механизма, состоящего из нескольких телескопически складывающихся балок-секций, например, из трех 8, 9 и 10 и гидравлических цилиндров 11 и 12, связанных с балками с возможностью возвратио-постунательного
движения их составляющих частей вдоль продольной оси стрелы. Гидравлические цилиндры 11 и 12 установлены внутри стрелы и связаны с балками 8, 9 и 10 при помощи шарниров 13, 14, 15 и 16.
Балка 8 своим нижним основанием через шарнир 5 связана с поворотной платформой 6, а через шарнир 17 - со штоком цилиндра 18, .установленного с помощью шарнира 19 на поворотной платформе 6 и
.служащего для поворота стрелы 4 относительно платформы 6. Поворотная платформа 6 через шарнирную опору 19 связана со штоком гидроцилиндра 20, установленного на шарнирной опоре 21, которая крепится к
конструкции корабля. На конце верхней секции 10 каждой стрелы в двухстепенном кардановом подвесе 22 установлены амортизаторы 23, например цилиндры масляно- воздушной амортизации. Выходные штоки
амортизаторов 23 направлены навстречу друг другу по оси каната 3, который крепится к этим штокам.
Двухстепенные кардановые подвесы 22 обеспечивают поворот цилиндров амортизаторов 23 относительно двух взаимно перпендикулярных осей вращения: оси 24, совпадающей с продольной осью стрелы 4
и беи 25, что исключает перегиб каната 3 во вр|емя работы причального устройства. : Устройство с захватом для сцепления летательного аппарата с.канатом причального устройства в убранном положении находится внутри носовой части фюзеляжа, с которым оно связано кинематически и обладает при посадке возможностью выпуска рабочего органа - захвата 26 вперед, в исходное положение перед носовой частью
фюзеляжа в пределах зоны обзора видимой из кабины летчика или углового, поворота, в продольной плоскости летательного аппарата, всей носовой части фюзеляжа, расположенной перед кабиной летчика, в сторону направления посадки.
I Устройство с захватом каната расположено в продольной плоскости фюзеляжа и состоит из захвата 26, закрепленного на траверсе.27, которая установлена на по- ДЁИЖНЫХ стойках 28. Траверса 27 связана со ш оками гидроцилиндров 29 с возможностью выпуска в полете перед посадкой.
Стойки 28 одним концом через шарнирные оси 30 связаны с траверсой 27, другим с помощью опор 31 установлены внутри фюзеляжа с возможностью поворота относительно-соосной оси 32 в продольной плоскости летательного аппарата. Гидро- цилиидры 29 с помощью опор 33 установле- ни внутри фюзеляжа с возможностью пс ворота относительно соосной оси 34 в той же плоскости, а их штоки через шарнирные оси 35 связаны с траверсой 27.
С целью сохранения при посадке хоро- шего обзора внешней обстановки, видимой из кабины летчика, и исключения загромождения ее конструктивными элементами при вы- захвата 26 силовой каркас траверсы 27 выполнен, например, в виде подвижной ст|ворки люка, наружный контур которого в уб|ранно.м положении, не нарушает аэроди- на мический контур фюзеляжа. Захват 26 ус- тфовлен в передней части траверсы 27 и представляет собой подковообразной фор- мы скобу 36, установленную в продольной пг оскости летательного аппарата, Открытая концевая часть скобы 36 служит основанием дгя крепления приемника-улавливателя ка- нг та причального устройства и в положении Захват выпущен всегда направлена в сто- рсну полета при посадке.
Приемник-улавливатель смонтирован н4 концах скобы и содержит два эксцент- установленных на шарнирах профи- л рованных кулачка 37. Кулачки 37 расположены на параллельных осях 38.
: Возможность работы в режиме стабили- гЦции при причаливании позволяет при- ч4/тьному устройству непрерывно
0
5
0
5 0
5
поддерживать и сохранять неизменным заранее заданное положение каната 3 в пространстве, при этом стрелы.4 относительно шарнирных опор 5 могут вращаться и занимать любое промежуточное положение в плоскости вращения между крайними положениями II и III и изменять свою длину от минимальной - положение II до максимальной - положение III. Положение I кинематически соответствует среднему положению каната 2 и стрелы 3 в пространстве относительно крайних положений II и III. Сохранение заданного положения каната 2 в. пространстве в режиме стабилизации, а также поддержание постоянного усилия его натяжения обеспечивают кинематически связанные со стрелами 3 гидроцилиндры 10, 11, 17, которые обладают возможностью управления с помощью ЭВМ.
Возможность работы причального устройства в режиме стабилизации при транспортировке исключает раскачивание летательного аппарата и его повреждение в условиях подвеса на канате 3. Транспортировку летательного аппарата после причаливания обеспечивают гидроцилиндры 19 путем поворота платформ 5 относительно шарнирных опор 20 в сторону НД корабля и гидроцйлиндры 10, 11, 17 при управлении стрелами 3 в режиме стабилизации.
На фиг.6 показано предлагаемое техническое решение устройства для захвата каната при посадке и примеры компоновки летательного аппарата с этим устройством.
В полете устройство для захвата каната находится в убранном положении внутри носовой части фюзеляжа, с которым оно связано посредством осей 38 и при помощи двух пружин 39, установленных в проушинах 40 на наружной поверхности скобы 36, поджаты к наружной поверхности этой скобы.
Устройство с захватом может быть также выполнено в виде установленной перед кабиной летчика на шарнире 41 носовой части фюзеляжа 42, связанной через шарнирные оси 43 со штоками гидроцилиндров 44.
На верхней задней поверхности по- . движной части фюзеляжа на шарнирной оси 45 установлена и кинематически связана с этой частью крышка обтекателя 46.
Отклонение носовой части фюзеляжа 42 с помощью гидроцилиндров 44 одновременно вызывает открытие под некоторым углом к ней крышки обтекателя, которые после совместного углового поворота в одной продольной плоскости при открытом положении крышки образуют между собой ловушку для каната 3. В центре ловушки
вблизи шарнирной оси 45 под крышкой обтекателя 46 установлен захват 26,
Система для посадки работает следующим образом.
На авианесущем корабле, находящемся в движении, перед началом полетов летательных аппаратов с помощью гидроцилиндров 11, 12, 18, связанных со стрелой 4, и гидроцилиндров 20, связанных с поворотной платформой 6, переводят стрелы 4 при- чального устройства из исходного положения Стрела убрана в исходное положение Стрела в рабочем положении, при этом автоматически поддерживается заданное усилие натяжения каната 3.
При волнении на море и качке корабля включают систему причального устройства в режим стабилизации заданного положения каната 3 в пространстве и непрерывно выдерживают это положение, а при измене- нии курса корабля разворачивают канат 3 в горизонтальной плоскости с помощью гидроцилиндров 1-1,12,18, связанных с элементами стрелы 4, которые .управляются ЭВМ.
На летательном аппарате снижают выг соту и скорость и производят заход на посадку (фиг.7, А).-.Выполняют маневр перевода летательного аппарата на большие углы атаки путем разворота в вертикальной плоскости с по- мощью аэрогазодинэмических органов управления на величину угла атаки, обеспечивающего уравновешивание веса летательного аппарата тягой двигателя и аэродинамической подъемной силой, одно-: временно снижают величину посадочной скорости до скорости движения корабля, а высоту полета до высоты положения каната 3 над уровнем моря.
Находящийся внутри носовой части фю- зеляжа захват 26 с помощью гидроцилиндров 29 переводят в положение Захват выпущен или поворачивают в сторону полета при посадке с помощью гидроцилиндров 44 всю носовую часть фюзеляжа 42 и открывают крышку обтекателя 46.
Выдерживают положение захвата 28 на высоте каната 3 (фиг.7. Б).
Управляют летательным аппаратом и в процессе управления подводят приемник- улавливатель захвата 26 к канату 3 причального устройства или улавливают канат 3 ловушкой , образованной носовой частью фюзеляжа 42 и крышкой обтекателя 46, которая направляет его к захвату 26, и при достижении относительной скорости посад- ки,близкой к нулю,захватывают канат 3.
& процессе захвата приемник-улавливатель, установленный на концевой части скобы 36, подводят до упора в канат 3 и
преодолевая усилия натяжения пружин 39, отжимают кулачки 37 от наружной поверхности скобы 36, при этом кулачки 37, поворачиваясь относительно осей 38, пропускают канат 3 внутрь скобы 36. Освобожденные от внешнего воздействия со стороны каната 3 кулачки 37 под действием пружин 39 возвращаются в первоначальное положение и запирают канат 3 внутри скобы 36 захвата 26 с постоянной фиксацией этого положения за счет прижатия кулачков 37 к внешней стороне скобы 36 при помдщи пружин 39, Момент касания скобы 36 каната 3 и его натяжение амортизируют за счет.пере- мещения штоков в цилиндрах масляно-воз- душной амортизации 23 причального устройства.
Отключают маршевые двигатели лета,- тёльного аппарата и переводят работу причального устройства из режима стабилизации пр; причаливании в режим стабилизации п;. л транспортировке в условиях подвеса лкгательного аппарата на канате 3 (фиг,7. В).
Транспортируют и устанавливают летательный аппарат на место стоянки, хранения или старта-, с этой целью, используя гидроцилиндры 11, 12, 18 и 20, вращают стрелы 4 и поворотные платформы 6 вперед, в сторону направления движения корабля (фиг.7, Г). Летательный аппарат отцепляют, при этом преодолевая натяжение пружин 39, поворачивают кулачки 37 внутрь скобы 36, освобождают захват 26 от каната 3.
Устанавливают стрелы,4 с канатом 3 в исходное положение, для этого используют в работе все гидравлические приводы причального устройства г(фиг.4, Д).
Формула изобрете.-ни я
условиях качки и изменения курса корабля, посадочную скорость и высоту полета летательного аппарата снижают путем разворота его в вертикальной плоскости с помощью рэрогазодинамических органов управления На величину угла атаки, обеспечивающего уравновешивание веса летательного аппарата тягой двигателя и аэродинамической одъемной силой, а в момент захвата каната Амортизируют его натяжение и отключают Йаршевые двигатели летательного аппарата. 2. Система для посадки пилотируемого Летательного аппарата на авианесущий корабль, содержащая размещенное на кормо- ой палубе корабля причальное устройство в виде двух стреловых грузоподъемных кра- с узлами для крепления каната на кон- щах стрел и с гидроцилиндрами для Приведения устройства в рабочее положе- ijme, а также размещенное на летательном Аппарате устройство с захватом для сцепле- ая с канатом причального устройства, отличающаяся тем, что, с целью Повышения эффективности боевого приме- ения и безопасности посадки, каждый из с|треловых кранов установлен на поворот- ых независимо управляемых платформах, фрелы выполнены независимо раздвижны- NJIH, узлы для крепления каната установлены н|а шарнирах с двумя степенями свободы и Снабжены амортизаторами, а устройство с
захватом на летательном аппарате установ- лено в продольной плоскости носовой части фюзеляжа, связано с аппаратом кинематической связью и выполнено в виде подковообразной скобы захвата, на передней части которой смонтирован приемник-улавливатель каната, выполненный в виде двух эксцентрично установленных на шарнирах профилированных кулачков с пружиной
поджатия их к наружной поверхности скобы.
установленной ка стойках.
связанных с приводом носовой части фюзеляжа и крышки обтекателя, образующих в рабочем положении ловушку для каната, а скоба захвата расположена у вершины угла, образованного между подвижной носовой
частью фюзеляжа и крышкой обтекателя после их поворота в сторону каната.
ВидА
J5
фи&З
34
зз
Zff
фЈ/&4
40
37фг/яр
Ф&&6
1837038
46
фе/&7
| Патент США № 3801050, кл | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
