Изобретение относится к авиационной технике, а точнее к способам и устройствам осуществления посадки беспилотного летательного аппарата (БПЛА) самолетного типа вне стационарных аэродромов при отсутствии взлетно-посадочной полосы (ВПП).
Со второй половины XX столетия в мире отмечается непрерывное совершенствование БПЛА, улучшаются их тактико-технические характеристики (ТТХ), разрабатываются современные образцы и их применение в различных сферах деятельности. Практически все войны уже ведутся с использованием БПЛА, которые можно производить массово, в отличие от современных самолетов. Такие аппараты превратились в грозную силу благодаря современной электронике, композитным материалам, технологиям «стелс» и разнообразному вооружению, которое можно на них установить. Их практически не останавливают помехи, которые нейтрализуются современными системами связи (в т.ч. спутниковой) и использованием между БПЛА и станцией управления БПЛА-ретранслятора. Они могут сутками «висеть» над передовой, обеспечивая поиск и обнаружение наземных и надводных целей, классификацию обнаруженных целей, определение координат объектов и целей, непрерывный мониторинг обстановки, информационное обеспечение применения огневых и ударных средств в разведывательно-ударных системах. Так же используются для постановки помех, ретрансляции связи и огневого поражения объектов. В интересах решения этих задач создается подавляющее большинство комплексов БПЛА.
Выполнение этих задач напрямую зависит от возможностей применения данных комплексов, использования как с ВПП так и с неподготовленных площадок. Важнейшим элементом является посадка, особенно вне специально подготовленных, требующих больших капиталовложений площадок. Возможность использования и прежде всего для посадки с ограниченных площадок позволяет расширить область применения БПЛА и сохранить их для повторного использования.
Известен способ принудительной посадки БПЛА вертолетного типа на посадочную площадку корабля (RU 2620848 от 2017 г.), при котором выравнивают скорость и курс БПЛА со скоростью и курсом корабля, стабилизируют БПЛА в точке зависания над точкой посадки на палубе, летательный аппарат и корабль соединяют посадочным тросом, подаваемым или с борта корабля, или с борта БПЛА, свободный конец посадочного троса фиксируют в захватном механизме и притягивают летательный аппарат к посадочной площадке корабля, наматывая посадочный трос на лебедку притяга, уводят БПЛА назад к корме относительно точки посадки с таким расчетом, чтобы посадочный трос отклонился от вертикали на 45-55°, и создают тормозящее усилие, увеличивая подъемную силу на несущем винте, при этом посадочный трос при притяге удерживают с наклоном на угол 45…55° к корме.
Недостатком этого устройства является необходимость наличия подвижной посадочной площадки соответствующей скорости летательного аппарата.
Также известно устройство для взлета и посадки БПЛА (RU 2694251 от 2019 г.), содержащее посадочную площадку, устройство захвата строп парашюта, манипулятор с закрепленными на нем видеокамерой и электронными посадочными средствами излучения в разных диапазонах частоты с конусообразными диаграммами направленности, консоль, двухплоскостной стабилизатор, приемную камеру и индикатор, причем к посадочной площадке шарнирно закреплен своим концом манипулятор, который другим своим концом шарнирно прикреплен к консоли, при этом другой конец консоли соединен с двухплоскостным стабилизатором, причем манипулятор выполнен телескопическим с четырьмя степенями свободы и возможностью изменения угловой скорости, а сетка-улавливатель шарнирно прикреплена к посадочной площадке и выполнена с возможностью ее складывания при складывании посадочной площадки в приемную камеру.
Недостатком данного технического решения является сложность конструкции, требующая наличия манипулятора и точной согласованной работе всех устройств.
Известен способ посадки беспилотного самолета на аэрофинишер (RU 2399560 от 2010 г.), в котором используют приемный участок подвижного троса, натянутый через направляющие ролики горизонтально посредине между верхними концами двух балок, имеющих механическую связь нижними концами с основанием, а на принимаемом самолете захватывающая трос система расположена позади его центра тяжести, при этом на посадочном режиме траекторию полета самолета формируют так, чтобы зацепление за приемный участок троса происходило при пролете или после пролета над этим участком, после чего выключают воздушный движитель и как можно интенсивнее тормозят самолет до заданной скорости, соблюдая при этом принятые для него ограничения по перегрузке и регулируя выпуск приемного троса, для заданного диапазона скоростей захода на посадку в допустимых условиях эксплуатации конкретного типа самолета. Характеристики захватывающей трос системы (длина, вес, несущие свойства и аэродинамическое сопротивление) определены так, чтобы ширина заметаемой гибким поводком полосы захвата была не меньше точности управления по высоте траекторией полета этого типа самолета, у первого каскада аэрофинишера поддерживающие приемный участок троса балки (мачты) неподвижны относительно основания в процессе захода на посадку, а высота расположения приемного участка троса над прилегающей к аэрофинишеру поверхностью больше суммы номинального приращения высоты на заданном маневре перехода на пологое кабрирование и точности управления самолетом по высоте, причем второй каскад аэрофинишера размещают относительно первого каскада так, чтобы область допустимых начальных условий второго каскада аэрофинишера полностью покрывала область конечных состояний самолета после торможения его на первом каскаде, на режиме захода на посадку наведение траектории полета производят в расположенную на осевой вертикальной плоскости аэрофинишера номинальную точку начала выполнения маневра пологого подъема, затем осуществляют этот маневр вдоль осевой плоскости аэрофинишера до момента наложения захватывающей системы на приемный участок троса, соединяют устройство зацепления с приемным тросом, после чего подавляющую часть кинетической энергии самолета поглощают на первом каскаде аэрофинишера за счет работы, совершаемой сосредоточенной силой подводимой через поводок к основному несущему элементу (основным несущим элементам) конструктивно-силовой схемы самолета, а оставшуюся часть кинетической энергии поглощают на втором каскаде аэрофинишера преимущественно за счет работы распределенных сил, воздействующих на внешнюю поверхность самолета со стороны демпфирующих элементов этого каскада.
Недостатком данного технического решения является необходимость соблюдения жестких параметров полета при посадке, сложность конструкции в которой существует необходимость точного учета характеристик летательного аппарата захватывающего трос, знание его длины и веса.
Наиболее близкой по технической сущности к заявленному изобретению является система посадки БПЛА самолетного типа (RU 2678407 от 2019 г.), состоящая из интегрированной части, расположенной во внутренней полости фюзеляжа БПЛА и базовой части, установленной на стационарном или подвижном объекте, при этом:
- интегрированная часть системы содержит трос с якорем, закрепленный на поперечно установленную фюзеляжу силовую трубу;
- отсек для троса, выполненный в виде вертикально расположенной во внутренней полости фюзеляжа БПЛА самолетного типа трубы и соединенной с хвостовой балкой летательного аппарата;
- устройство, выталкивающее якорь, представляющее собой сервомашинку и трубку-направляющую, расположенную внутри вертикальной трубы;
- систему наведения, содержащую видеопередатчик и камеру, расположенную в носовой части летательного аппарата строго по курсу летательного аппарата, а базовая часть представляет собой посадочный элемент, выполненный в виде горизонтальной реи, выполненной с возможность поворота вокруг собственной оси, при этом на базовой части системы посадки БПЛА самолетного типа установлены метки, выполненные с возможностью определения упомянутой камерой. Дополнительно содержит лебедку, выполненную с возможностью затягивания троса с якорем и расположенную во внутренней полости фюзеляжа БПЛА самолетного типа.
Недостатком данного технического решения является необходимость наличия специальной конструкции посадочного элемента, ограничивающая область применения, трудность безаварийного извлечения летательного аппарата из данной конструкции посадочного элемента.
Задачей, решаемой заявленным техническим решением, является создание эффективной системы безаварийной посадки БПЛА самолетного типа на ограниченные по размеру посадочные площадки.
Техническим результатом является расширение возможностей использования БПЛА самолетного типа, снижение зависимости от ограниченной площади для посадки.
Требуемый технический результат достигается тем, что система посадки беспилотных летательных аппаратов, состоит из размещенных в фюзеляже БПЛА самолетного типа лебедки с тросом и якорем, лебедка дополнительно оборудована датчиком силы натяжения троса. Так же в фюзеляже размещаются эластичная газонепроницаемая емкость, внутри которой находится трубчатый теплообменник, нагреваемый электрическим нагревательным элементом, к теплообменнику через воздушный клапан присоединен баллон, заполненным сжатым подъемным газом. Работа всех устройств беспилотного летательного аппарата обеспечивает система управления и координируется оператором по радиоканалу. В качестве посадочного элемента используется вывешенный на опорах фал с жестко закрепленными концами.
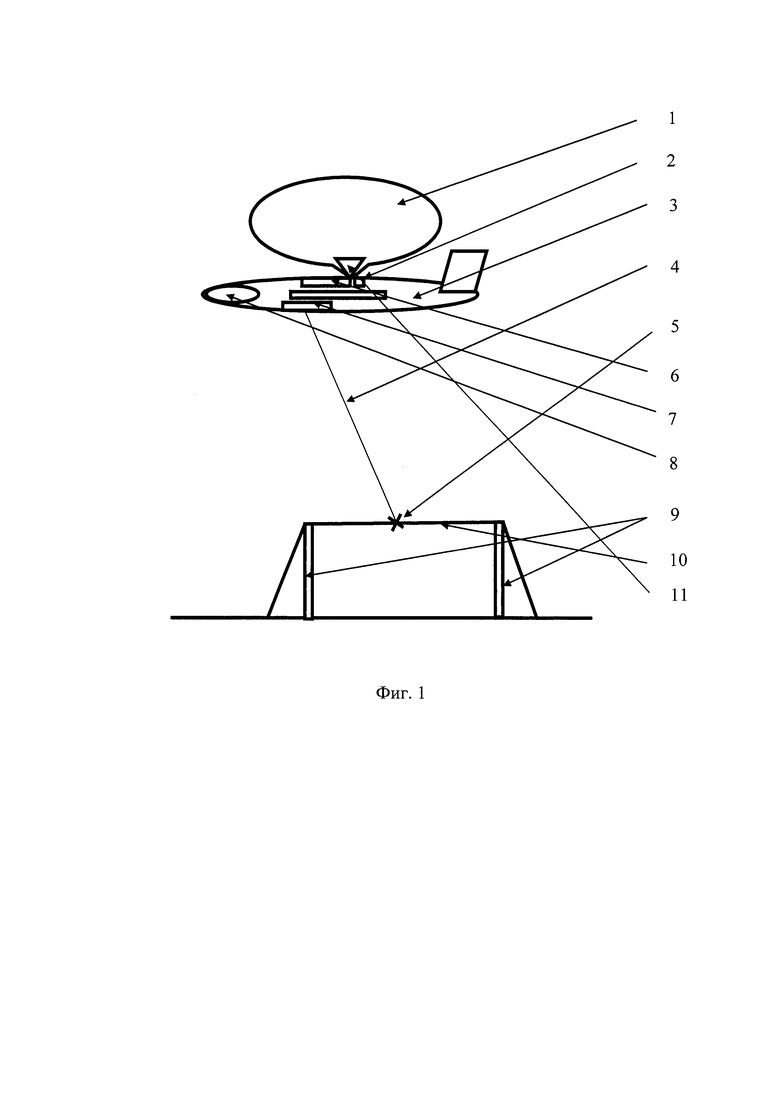
Сущность изобретения поясняется чертежом, где на Фиг. 1 представлена система посадки БПЛА, включающая в свой состав:
1 - эластичная газонепроницаемая емкость;
2 - воздушный клапан;
3 - фюзеляж беспилотного летательного аппарата;
4 - трос;
5 - якорь;
6 - баллон со сжатым подъемным газом;
7 - лебедка;
8 - система управления и связи;
9 - опоры;
10 - фал;
11 - теплообменник.
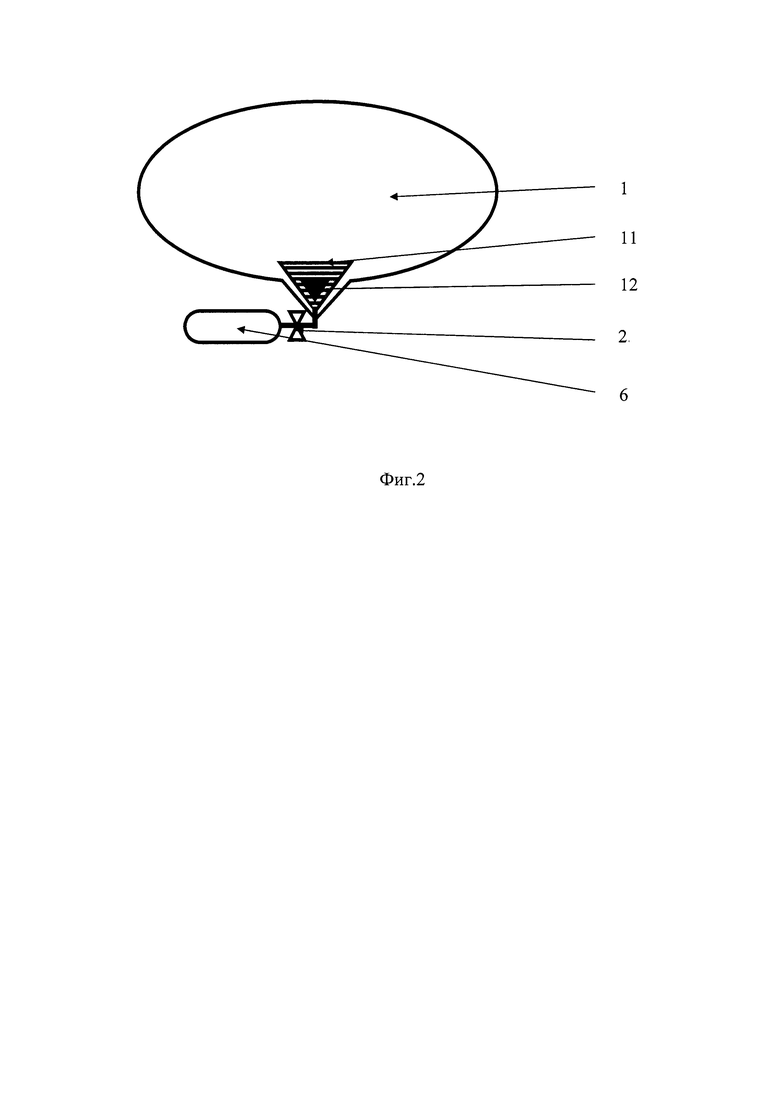
На Фиг. 2 представлено устройство подогрева подъемного газа, системы посадки БПЛА:
1 - эластичная газонепроницаемая емкость;
2 - воздушный клапан;
6 - баллон со сжатым подъемным газом;
11 - трубчатый теплообменник;
12 - электрический нагревательный элемент.
Система посадки БПЛА работает следующим образом: при минимальном запасе топлива на летательном аппарате осуществляется оповещение оператора о необходимости скорой посадки. Осуществляется подготовка посадочного элемента состоящего из вывешенного на опорах (9) фала (10) с жестко закрепленными концами.
БПЛА по команде оператора, полученной через систему управления и связи (8), снижается на установленную высоту, с помощью лебедки (7) вытравливает из фюзеляжа БПЛА (3) трос (4) с якорем (5) на конце.
БПЛА барражирует в районе посадочного элемента до осуществления зацепа якорем (5) фала (10). При зацепе увеличивается сила натяжения троса (4), фиксируемая датчиком силы натяжения троса, и системой управления и связи (8) вырабатываются команды на отключение двигателя БПЛА, включение электрического нагревательного элемента (12), нагревающего трубчатый теплообменник (11) и открытие воздушного клапана (2). Сжатый подъемный газ (гелий, водород) вырываясь из баллона (6) осуществляет адиабатическое расширение характеризующееся падением температуры подъемного газа. Для повышения температуры подъемного газа поток направляется в трубчатый теплообменник (11), где повышается температура подъемного газа. Повышение температуры подъемного газа позволяет быстро, используя минимально необходимое количество подъемного газа, заполнить эластичную газонепроницаемой емкость (1) подъемным газом из баллона со сжатым подъемным газом (6). Подъемная сила газа в эластичной газонепроницаемой емкости (1) вывешивает БПЛА. Сматывая трос (4) с помощью лебедки (7) или со стороны якоря (5) вручную или другими устройствами, осуществляют мягкую посадку летательного аппарата.
Объем подъемного газа для осуществления мягкой посадки рассчитывается индивидуально для каждого типа летательного аппарата с учетом веса фюзеляжа, двигателя и других элементов, а также используемой полезной нагрузки. Необходимо отметить, что при использовании БПЛА с ДВС запас топлива будет расходоваться в полете и масса уменьшится при посадке.
После пополнения запасов топлива, обслуживания других элементов БПЛА, замены баллона со сжатым подъемным газом (6), полезной нагрузки при необходимости, летательный аппарат можно повторно использовать, запустив со специального устройства.
Возможность многократно применять БПЛА самолетного типа позволяет эффективно использовать их функциональные возможности. Способность длительное время находиться в воздухе и осуществлять наблюдение за протяженными территориями, выполнять задачи наблюдения, обеспечения связи и целеуказания, а при необходимости и поражения обнаруженных объектов позволяет реализовать все плюсы БПЛА самолетного типа и использовать их в различных физико-географических условиях местности при отсутствии специальных площадок. Открывается возможность использования их с морских и речных судов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678407C1 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678408C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА НА АЭРОФИНИШЕР | 2009 |
|
RU2399560C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОГО ТИПА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2767389C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС С УНИВЕРСАЛЬНЫМ СИЛОВЫМ УСТРОЙСТВОМ | 2012 |
|
RU2497714C2 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС АВИАНЕСУЩЕГО КОРАБЛЯ | 2012 |
|
RU2494005C1 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОДВИЖИТЕЛЕМ И ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2014 |
|
RU2592963C2 |
Изобретение относится к беспилотным летательным аппаратам. Система посадки беспилотных летательных аппаратов состоит из размещенных в фюзеляже (3) лебедки (7) с тросом (4) и якорем (5), оборудованной датчиком силы натяжения троса. В фюзеляже размещаются эластичная газонепроницаемая емкость (1), внутри которой находится теплообменник (11) с нагревательным элементом. К теплообменнику (11) через воздушный клапан (2) присоединен баллон (6), заполненный сжатым подъемным газом. Работу всех устройств беспилотного летательного аппарата обеспечивает система управления (8) и координирует оператор по радиоканалу. В качестве посадочного элемента используется вывешенный на опорах (9) фал (10) с жестко закрепленными концами. Достигается снижение зависимости от ограниченной площади для посадки. 2 ил.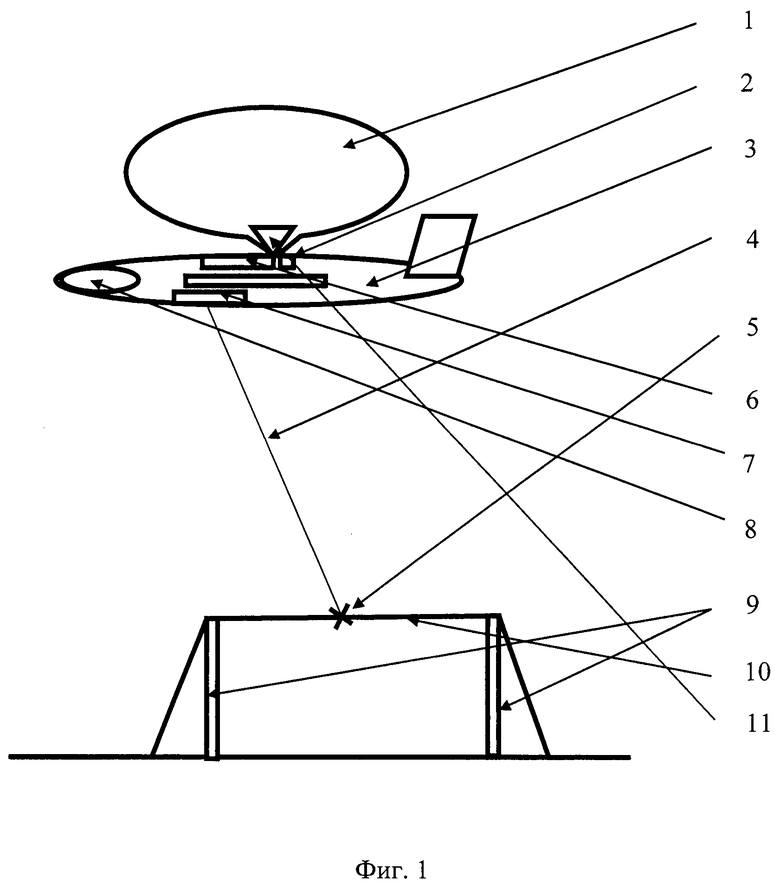
Система посадки беспилотных летательных аппаратов, состоящая из размещенных в фюзеляже беспилотного летательного аппарата самолетного типа лебедки с тросом и якорем и посадочного элемента, отличающаяся тем, что в фюзеляже беспилотного летательного аппарата самолетного типа дополнительно размещается эластичная газонепроницаемая емкость, внутри которой находится трубчатый теплообменник с нагревательным электрическим элементом, к теплообменнику через воздушный клапан присоединен баллон, заполненный сжатым подъемным газом, также лебедка дополнительно оборудована датчиком силы натяжения троса, имеется система управления и связи, в качестве посадочного элемента используется вывешенный на опорах фал с жестко закрепленными концами.
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678407C1 |
| РОТОРНО-ДЕПКАЯ МАШИНА | 0 |
|
SU221478A1 |
| ПАТЕНТНО- ..гА. П. Струковi * Is | 0 |
|
SU180260A1 |
| US 9407000 B1, 02.08.2016 | |||
| US 20240101286 A1, 28.03.2024 | |||
| EP 3680181 A1, 15.07.2020 | |||
| US 8276844 B2, 02.10.2012 | |||
| WO 2013171735 A1, 21.11.2013. | |||

