Предлагаемое изобретение относится к области космической техники, а именно к устройствам управления угловым положением космического аппарата (КА) с помощью гироскопических исполнительных органов.
В настоящее время известны силовые гироскопические устройства (СГУ), предназначенные для генерирования моментов с целью управления угловым положением КА (см., например, Б.В.Раушенбах, Е.Н.Токарь. Управление ориентацией космических аппаратов, М.: Наука, 1974 г.)
Такие устройства характеризуются значительными перекрестными связями; в общем случае, при вращении гироскопа вокруг одной оси подвеса вектор кинетического момента описывает сложную траекторию, что приводит к появлению моментов вокруг других осей КА. Перекрестные связи усложняют динамику движения КА, приводят к появлению дополнительных ошибок углового положения аппарата и к нерациональному расходу энергии.
Величину моментов, развиваемых такими устройствами, определяют обычно расчетным путем по сложным аналитическим выражениям, используя информацию об углах отклонения гироскопов и угловых скоростях поворота осей подвеса. Это приводит к тому, что резко усложняется аппаратурный состав гироскопического устройства, a для выполнения расчетов необходима бортовая вычислительная машина.
В известном устройстве, описанном в авт. св. № 1839792, МПК кл. G 01 С 19/00, используют два механически синхронизированных трехстепенных гироскопа, для устранения перекрестной связи по одной оси, а уменьшение перекрестных связей по двум другим осям осуществляют с помощью отрицательных обратных связей по моментам, выделяемым СГУ. Такая связь основана на использовании момента гироскопической реакции подобных устройств, который вызывает деформацию элементов их конструкции. Деформация элементов прямо пропорциональна моментам, развиваемым СГУ, поэтому при измерении этой деформации и введении ее в качестве отрицательной обратной связи на соответствующие электроприводы поворота получается устройство, которое с минимальным аппаратурным составом обеспечивает автономность каналов управления, пропорциональность характеристик "вход - выход" и уменьшение влияния ряда технологических факторов СГУ (неравенство кинетических моментов, неперпендикулярность осей подвеса, люфт и т.д.) на систему управления положением КА.
Недостатком такого устройства является то, что измерители момента должны регистрировать довольно малые величины деформации в широком диапазоне их изменения. Со временем элементы конструкции под воздействием внешней среды, "старения" материала и других факторов изменяют свои первоначальные размеры. Особенно это сказывается на измерителе момента (обычно мостовом), который с течением времени разбалансируется. Это приводит к тому, что на выходе измерителя момента, даже при отсутствии управляющего сигнала, появляется сигнал ошибки, являющийся внутренним возмущающим моментом для системы управления КА. Величина такого сигнала может быть довольно большой, что уменьшает точность создания управляющих моментов и при использовании такого устройства в системе управления КА значительно увеличивает ошибку его угловой ориентации. Происходящий со временем разбаланс цепи обратной связи по выделяемому CГУ моменту существенно снижает срок высокоточного активного существования и уменьшает надежность системы управления КА с таким устройством.
Целью предлагаемого изобретения является увеличение точности, долговечности и надежности силового гироскопического устройства для управления ориентацией космических аппаратов.
Поставленная цель достигается тем, что в силовое гироскопическое устройство по авт. св. №1839792 введены блок формирования скорости, усилительно-преобразующее устройство, нуль-органы, блоки включения автоподстройки и исполнительные устройства балансировки, причем каждый вход нуль-органа связан с выходом усилительно-преобразующего устройства цепи измерения момента, а выход, через блок включения автоподстройки, поступает на вход исполнительного устройства балансировки, связанного с мостовым измерителем момента, в свою очередь каждый вход блока включения автоподстройки связан с выходами блока формирования скорости и усилительно-преобразующего устройства, входы которых связаны с соответствующими входами управления.
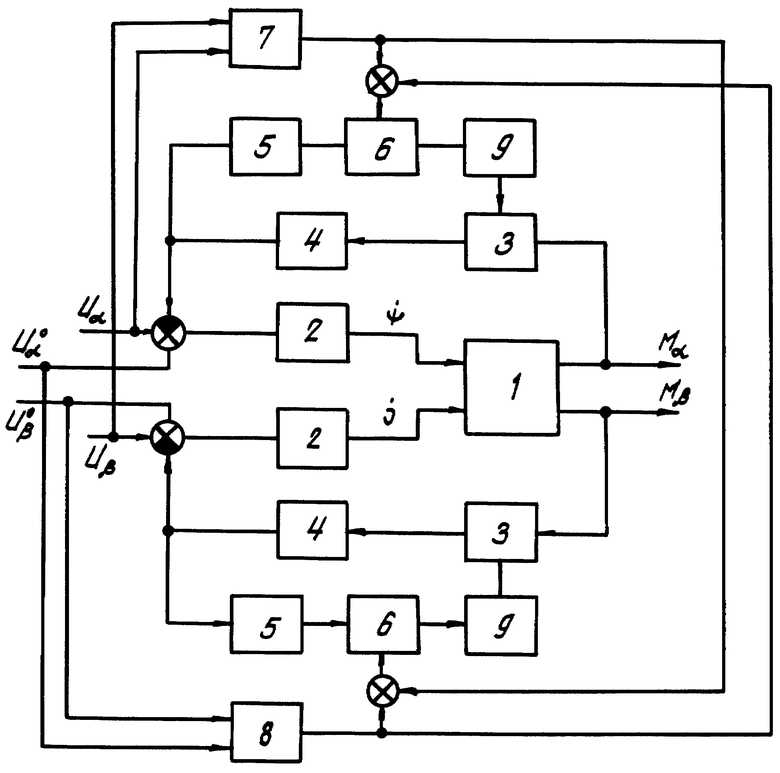
Блок-схема предлагаемого устройства для двух каналов управления представлена на чертеже.
Силовое гироскопическое устройство 1 с электроприводами поворота по каждой оси 2 охвачено основными обратными связями, состоящими из мостовых измерителей моментов 3 и усилительно-преобразующих устройств 4. Дополнительные обратные связи автобалансировки для каждого канала управления состоят из нуль-органов 5, блоков включения автобалансировки 6, управляемых от блока формирования скорости 7 и усилительно-преобразующего устройства 8, и исполнительного устройства балансировки 9.
Устройство работает следующим образом. В режиме стабилизации КА сигналы с датчиков положения Uα и Uβ приходят на соответствующие входы управления СГУ. При малых вращениях КА, в установившемся режиме, места, где расположены мостовые измерители момента 3, не испытывают деформации (за исключением малых возмущающих воздействий на КА, которые обычно соизмеримы с нижним уровнем чувствительности измерителей момента) и усиленные сигналы с них, поступая на входы электроприводов 2, формируют на выходе СГУ моменты, пропорциональные разбалансу измерителей момента, которые, являясь возмущающими, увеличивают ошибку стабилизации КА. Во время малого вращения КА блок формирования скорости 7, связанный c входными сигналами Uα и Uβ, не выдает сигнала в блоки включения автоподстройки 6, которые, работая по принципу нормально-замкнутого реле, подключают обратную связь из нуль-органа 5 и исполнительного устройства 9, с фиксацией отбалансированного значения при разрыве цепи автоподстройки, осуществляющих балансировку мостовых измерителей момента 3. Устройство включения автоподстройки 6 работает в релейном режиме, подключая цепь балансировки на короткие промежутки времени, достаточные для проведения автоподстройки измерителя момента 3. В течение этого времени управление ведется, минуя контур обратной связи измерения момента. Блок формирования скорости 7 выполнен таким образом, что при появлении изменения входных сигналов Uα и Uβ, обусловленных переходными процессами, вызванными большими возмущающими
воздействиями или при балансировке больших рассогласований, он выдает сигнал в виде напряжения U≈Uα(Uβ), необходимый для срабатывания блоков включения автоподстройки 6, отключающих цепь балансировки мостовых измерителей момента, и СГУ работает с основными обратными связями по выделяемым моментам. Нижняя граница формирования скорости, необходимая для срабатывания блока включения автоподстройки, лежит в пределах чувствительности измерителя момента и выбирается, исходя из необходимой точности ориентации КА, обычно является достаточным, когда скорость изменения входного сигнала, при которой срабатывает блок включения автоподстройки, находится в пределах

где Mс - момент сопротивления по оси разворота гироскопа;
H - кинетический момент гироскопа.
Это вызвано тем, что момент сопротивления по оси разворота гироскопа является порогом чувствительности на вращение КА для измерителей момента, расположенных на механизме синхронизации.
Для получения высокой точности необходимо постоянную времени контура обратной связи автоподстройки выбирать значительно ниже контура "СГУ-КА", так как при этом измерители момента отбалансируются прежде, чем изменение моментов от СГУ, вызванное в процессе балансировки, приведет к вращению КА со скоростью, достаточной для разрыва цепи автоподстройки. В противном случае процесс балансировки может быть длительным.
При необходимости создания постоянных управляющих моментов на КА, с целью его переориентации, создания программных разворотов или разгрузке, сигналы, пропорциональные этим моментам, поступают на другие входы CГУ U°α и U°β. С этими входами связано усилительно-преобразующее устройство 8, выход которого также поступает на входы блоков включения автоподстройки 6, и которое, при появлении постоянных сигналов управления, выдает сигнал, достаточный для разрыва цепи обратной связи автоподстройки, при этом СГУ также работает только с обратными связями по выделяемым на оси моментам.
Блок формирования скорости 7 и усилительно-преобразующее устройство 8 используются по одному на оба канала управления, то есть связаны с обоими входами устройства, а выходы подключены к блокам включения автоподстройки 6. Это обуславливается наличием перекрестных связей, присущих всем СГУ, так как при изменении сигнала на одном входе устройства, оба электропривода работают так, чтобы на противоположном выходе момент СГУ был равен нулю, и если блок формирования скорости или усилительно-преобразующее устройство не разрывает цепь автоподстройки по этой оси, сигнал с измерителя момента, поступающий на электропривод и необходимый для компенсации момента, будет балансироваться цепью автоподстройки, имеющей малую постоянную времени. В этом случае пропадет эффект автономности от цепи обратной связи по выделяемому моменту.
Данное силовое гироскопическое устройство для управления ориентацией космических аппаратов в результате введения дополнительных связей, балансирующих мостовые измерители момента в зависимости от изменения входных сигналов, обладает более высокой точностью во время длительного активного существования КА с таким исполнительным органом системы управления ориентацией и большей надежностью из-за автоматической компенсации нежелательных погрешностей устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКИХ АППАРАТОВ | 1973 |
|
SU1839792A1 |
| СПОСОБ ОРИЕНТАЦИИ ЦЕЛЕВОЙ АППАРАТУРЫ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2009 |
|
RU2412873C1 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| Система астроориентации орбитального космического аппарата с обратными связями | 2023 |
|
RU2812876C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ЭЛЕМЕНТ СИЛОВОГО ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА ДЛЯ СОЗДАНИЯ УПРАВЛЯЮЩЕГО МОМЕНТА НА БОРТУ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2007 |
|
RU2343419C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2007 |
|
RU2375269C2 |
| Устройство для управления движением космического аппарата вокруг центра масс | 1990 |
|
SU1819834A1 |
| БЕЗЫНЕРЦИОННЫЙ СИЛОВОЙ ГИРОСКОП | 2006 |
|
RU2308003C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2519603C2 |
Изобретение относится к области космической техники, а именно к устройствам управления угловым положением космических аппаратов с помощью гироскопических исполнительных органов, выполненных на основе спаренных гироскопов. Устройство содержит трехстепенные гироскопы с механической синхронизацией однотипных осей подвесов и электроприводами по этим осям и мостовыми измерителями моментов на каждом механизме синхронизации, выходы которых через усилительно-преобразующие блоки соединены со входами управления электроприводов, а также блок формирования скорости и преобразователь управляющих сигналов, при этом между усилительно-преобразующими блоками и мостовыми измерителями введены последовательно соединенные нуль-органы, блоки включения автоподстройки и исполнительные устройства балансировки, а второй и третий входы блоков включения автоподстройки соединены соответственно с блоком формирования скорости и преобразователем управляющих сигналов. Техническим результатом является повышение точности и надежности устройства. 1 ил.
Устройство для управления ориентацией космического аппарата, содержащее трехстепенные гироскопы с механической синхронизацией однотипных осей, с электроприводами по этим осям и мостовыми измерителями моментов на каждом механизме синхронизации, выходы которых через усилительно-преобразующие блоки соединены со входами электроприводов, отличающееся тем, что, с целью повышения точности и надежности устройства, в него введены блок формирования скорости, преобразователь управляющих сигналов, а между усилительно-преобразующими блоками и мостовыми измерителями моментов каждого механизма синхронизации - последовательно соединенные нуль-органы, блоки включения автоподстройки и исполнительные устройства балансировки, причем второй и третий входы блоков включения автоподстройки соединены соответственно с блоком формирования скорости и преобразователем управляющих сигналов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СИЛОВОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКИХ АППАРАТОВ | 1973 |
|
SU1839792A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3158340, кл | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |

