Предлагаемое изобретение относится к электромеханическим исполнительным органам управления угловым положением космических летательных аппаратов, выполненных на основе спаренных (синхронизированных) гироскопов.
В настоящее время известны устройства, содержащие два гироскопа с механической синхронизацией осей их подвеса и электроприводы поворота гироскопов по осям подвеса (см. Кэннон Р.К., Гироскопическая связь в системе управления ориентацией космического корабля. - Техническая механика, №1, 1962).
Такие устройства предназначены для генерирования моментов с целью управления угловым положением космических аппаратов относительно двух ортогональных осей. Применение подобных устройств на космических аппаратах существенно затрудняется из-за наличия перекрестных взаимосвязей внутри гироблока, возникающих из-за сложных пространственных движений гироскопов и приводящих к генерированию динамических моментов вокруг двух осей даже при управлении гироблоком с целью получения момента лишь вокруг одной из осей. Перекрестные связи внутри гироблока существенно усложняют динамику углового движения космического аппарата, приводят к появлению дополнительных ошибок в его угловой ориентации и к дополнительному нерациональному расходу энергии.
Компенсацию вредного влияния нежелательных составляющих моментов управления, обусловленных внутренними взаимосвязями в гироблоке, принципиально можно произвести с помощью вычислительных средств, используя информацию об углах отклонения гироскопов и угловых скоростях поворотов рам их подвесов (см. Джекот Лиска. Трехстепенный силовой гироблок для точного управления ориентацией. -Ракетная техника и космонавтика, №3, 1968). Однако подобная компенсация приводит к существенному усложнению систем ориентации, для ее реализации необходима бортовая ЭВМ. К тому же ряд технологических факторов (неравенство кинетических моментов, неперпендикулярность осей подвеса, люфты и т.п.) остаются неучтенными.
Предлагаемое устройство в известной мере свободно от указанных недостатков. Развязка каналов управления в предлагаемом гироблоке достигается за счет измерения моментов на выходных синхронизированных осях гироблоков и введения на этой основе компенсирующих обратных связей.
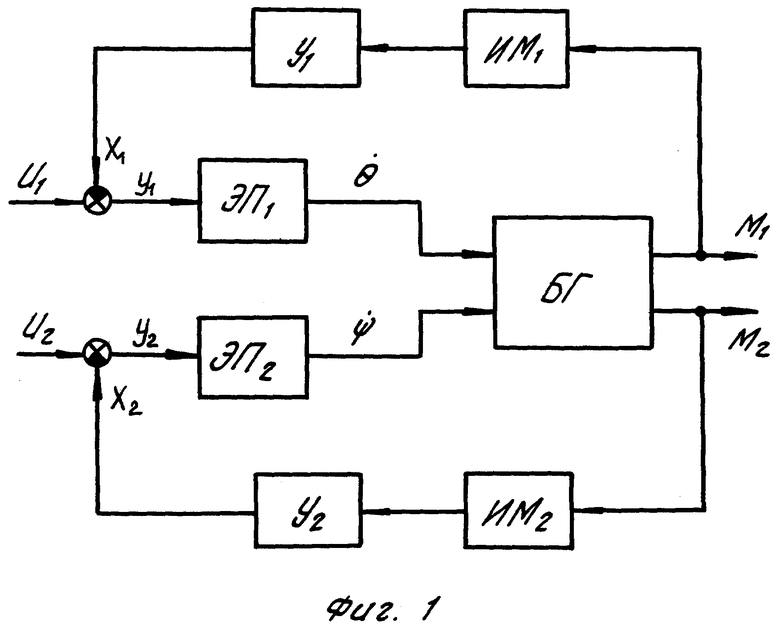
Блок-схема предлагаемого устройства представлена на фиг.1.
Здесь БГ - блок механически синхронизированных (спаренных) гироскопов;
ЭП1, ЭП2 - электроприводы поворота осей подвеса гироскопов;
ИМ1, ИМ2 - измерители моментов на синхронизированных осях подвеса гироскопов;
У1, У2 - усилительно-преобразующие устройства;
U1, U2 - сигналы управления;
M1, M2 - динамические моменты, развиваемые гироблоком по ортогональным осям;
 - скорости поворота осей подвеса гироскопов.
- скорости поворота осей подвеса гироскопов.
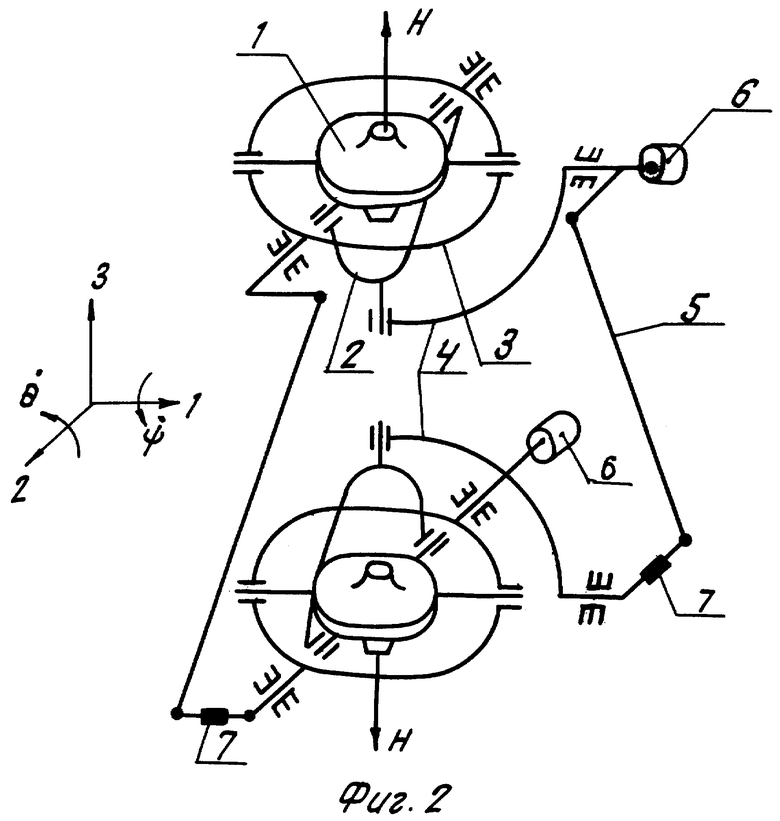
Одна из возможных схем гироблока с механически спаренными гироскопами приведена на фиг.2. В этом гироблоке гиророторы 1 установлены в подвесе бикарданового типа, включающем внутренние и наружные рамки (соответственно 2, 3), и водила 4. Оси вращения наружных рам 3 и водила 4 механически синхронизированы (в данном случае - с помощью антипараллелограммных устройств 5). Для управления гироблоком эти оси соединены с двигателями 6 электроприводов.
В данном устройстве динамические моменты передаются на космический аппарат с целью управления его ориентацией через механизмы синхронизации и двигатели, поэтому, установив на кривошипах механизмов синхронизации измерители деформации (например, тензодатчики) 7, можно получить информацию о моментах, создаваемых гироблоком. В дальнейшем эта информация может быть использована для уменьшения внутренних взаимосвязей 1 в гироблоке согласно фиг.1.
Для этих целей сигналы с измерителей моментов ИМ1 и ИМ2 предварительно усиливают и подают на вход электроприводов, реализуя отрицательные обратные связи как показано на фиг.1.
Для подтверждения эффективности введения обратных связей по моментам, согласно фиг.1, установим взаимосвязь управляющих сигналов U1, U2 и генерируемых моментов M1 и М2 в описанном гироблоке.
Динамика рассматриваемой системы с приемлемыми допущениями, описывается следующей совокупностью уравнений:
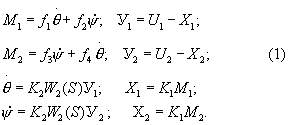
где f1÷f4 - нелинейные функции углов  и
и  ,
,
K2W2(S) - передаточные функции электроприводов.
Согласно системе уравнений (1) введение обратных связей по моментам приводит к следующим значениям выходных моментов гироблока:

Если обеспечить в области рабочих частот
K1K2W2(jω )>> 1,
то получим:

что свидетельствует о существенном снижении влияния внутренних взаимосвязей в гироблоке автономизации и приближении к линейным его характеристик M1 (U1) и M2 (U2), и, следовательно, об эффективном использовании введенных обратных связей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКИХ АППАРАТОВ | 1976 |
|
SU1839794A1 |
| СИЛОВОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 1971 |
|
SU1839791A1 |
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1994 |
|
RU2117917C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| ЭЛЕМЕНТ СИЛОВОГО ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА ДЛЯ СОЗДАНИЯ УПРАВЛЯЮЩЕГО МОМЕНТА НА БОРТУ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2007 |
|
RU2343419C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| БЕЗЫНЕРЦИОННЫЙ СИЛОВОЙ ГИРОСКОП | 2006 |
|
RU2308003C1 |
| СПОСОБ НАЧАЛЬНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2000 |
|
RU2180729C2 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ДВИЖЕНИЯ | 1991 |
|
RU2253090C2 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
Изобретение относится к электромеханическим исполнительным органам управления угловым положением космических летательных аппаратов, выполненных на основе спаренных гироскопов. Устройство содержит трехстепенные гироскопы с механической синхронизацией однотипных осей подвесов и электроприводами по этим осям, при этом на каждом механизме синхронизации установлены измерители моментов, выходы которых через усилительно-преобразующие блоки соединены со входами управления электроприводов. Техническим результатом является повышение надежности работы. 2 ил.
Силовое гироскопическое устройство для управления ориентацией космических аппаратов, содержащее трехстепенные гироскопы с механической синхронизацией однотипных осей подвесов и электроприводами по этим осям, отличающееся тем, что, с целью повышения надежности работы, в нем на каждом механизме синхронизации установлены измерители моментов, при этом выходы этих измерителей через усилительно-преобразующие блоки соединены со входами управления электроприводов.
| Авторское свидетельство СССР № 378713, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

