Предлагаемое изобретение относится к маятниковым компенсационным акселерометрам.
Одной из наиболее актуальных проблем современной акселерометрии является повышение точности работы акселерометров в условиях динамических воздействий - ударных, импульсных и виброударных перегрузок. Наиболее эффективным методом снижения погрешностей от динамических воздействий является повышение динамического коэффициента передачи акселерометра.
Известен компенсационный акселерометр, в котором применена нелинейная коррекция, позволяющая значительно уменьшить вибрационную погрешность. Однако этот акселерометр обладает существенным недостатком, заключающимся в большой фазовой нестабильности выходной частоты, которая, вследствие малости времени калибровки акселерометра, может приводить к значительным погрешностям в измерении масштабного коэффициента. Причиной большой фазовой нестабильности является гармоническая помеха с частотой источника бортового питания, возникающая на входе регулирующего блока из-за наличия паразитных связей сигнальных цепей акселерометра с цепями питания переменного тока. Фильтрация этой помехи в тракте акселерометра при помощи линейных методов приводит к необходимости уменьшения динамического коэффициента передачи акселерометра, т.е. к уменьшению точности его работы в динамических режимах. Целью предлагаемого изобретения является повышение точности работы акселерометра в динамических режимах. Сущность изобретения состоит в том, что на выход регулирующего блока последовательно с датчиком момента включен резистор, один вывод которого через конденсатор и два последовательно соединенных резистора подключен к одному входу регулирующего блока, а другой вывод резистора соединен со вторым входом регулирующего блока, а также через нелинейный резистор с отрицательной характеристикой с общей точкой последовательно соединенных резисторов.
На фиг. 1 приведен пример структурной схемы акселерометра, в котором реализовано предлагаемое изобретение. На фиг. 1 обозначены: 1 - чувствительный элемент, состоящий из воспринимающего элемента (маятника) - 2, подвижной системы - 3, датчика угла - 4, датчика момента - 5, 6 - регулирующий блок (РБ).
Датчик угла чувствительного элемента 4 соединен со входом регулирующего блока 6, на выход которого включен датчик момента 5. На выходе регулирующего блока 6, последовательно с датчиком момента 5 включен резистор R3, один вывод которого через конденсатор С1 и последовательно соединенные резисторы R1 и R2 подключен ко входу регулирующего блока. Общая точка резисторов R1 и В2 через нелинейное сопротивление с отрицательной характеристикой 7 подключена ко второму входу регулирующего блока и второму выводу резистора R3. Нелинейное сопротивление 7 в рассматриваемом примере реализовано в виде последовательного соединения постоянного резистора R4 и параллельно включенных диодов Д1 и Д2.
Схема работает следующим образом. При действии ускорения на воспринимающий элемент 2, подвижная система 3 перемещается на угол, преобразуемый датчиком угла 4 в напряжение, которое после усиления и преобразования в регулирующем блоке 6 поступает в датчик момента 5, создавая компенсирующий момент обратной связи. Подключение резисторов R1 и R2 к резистору R3 выбрано реализующим отрицательную обратную связь с выхода на вход РБ.
Предлагаемый акселерометр при отсутствии динамических перегрузок имеет достаточно малый динамический коэффициент передачи, обеспечивающий высокую помехозащищенность акселерометра, т.е. практическое отсутствие переменной составляющей в токе обратной связи. При этом нелинейный резистор имеет большое сопротивление, обеспечивающее отсутствие шунтирования тока обратной связи, протекающего по цепи С1, R2 и R1 с выхода на вход регулирующего блока. Воздействие динамических перегрузок приводит к появлению значительных переменных сигналов в токе обратной связи. По мере увеличения амплитуды и частоты переменной составляющей увеличивается величина падения напряжения на резисторе R3, что приводит к уменьшению величины нелинейного сопротивления 7. В рассматриваемом случае это происходит вследствие того, что увеличение тока через цепь R4 и Д1 и Д2 приводит к уменьшению динамического сопротивления нелинейного резистора. Уменьшение сопротивления нелинейного резистора приводит к шунтированию части тока обратной связи по цепи C1, R2 и R1, что обуславливает увеличение динамического коэффициента передачи акселерометра при воздействии динамических перегрузок.
Таким образом, предлагаемая схема акселерометра обладает повышенной помехозащищенностью, и автоматически увеличивает свои коэффициент передачи в зависимости от амплитуды и частоты динамических перегрузок, что обеспечивает достаточно малую погрешность акселерометра в этих режимах.
Экспериментальная проверка показала возможность увеличения коэффициента передачи акселерометра при воздействии вибрации с амплитудой 3g в 4,5-5 раз по сравнению с коэффициентом передачи в режиме измерения масштабного коэффициента.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2341805C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2096785C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ДИСКРЕТНЫМ ВЫХОДОМ | 1978 |
|
SU1839853A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2138822C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ДИСКРЕТНЫМ ВЫХОДОМ | 1981 |
|
SU1839892A2 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2210781C2 |
| Прецизионный компенсационный маятниковый акселерометр | 1970 |
|
SU1839936A1 |
| Преобразователь переменного напряжения в постоянное с принудительным формированием входных токов | 1989 |
|
SU1677820A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗВУКОВОГО ДАВЛЕНИЯ | 2011 |
|
RU2476841C1 |
Изобретение относится к маятниковым компенсационным акселерометрам. Сущность: акселерометр содержит чувствительный элемент с датчиком силы и датчиком смещения, усилитель обратной связи и резистор, соединенный с общей точкой и включенный на выходе усилителя последовательно с обмоткой датчика силы. Кроме того, акселерометр снабжен первой цепочкой из последовательно соединенных конденсатора и двух резисторов, а также последовательно соединенными резистором и включенными встречно параллельно диодами. При этом резистор второй цепочки одним концом подключен к точке соединения резисторов первой цепочки, диоды присоединены к общей точке, а свободные концы конденсатора и резистора первой цепочки соединены с резистором в цепи датчика силы и входом усилителя соответственно Технический результат: увеличение точности работы в динамических режимах. 1 ил.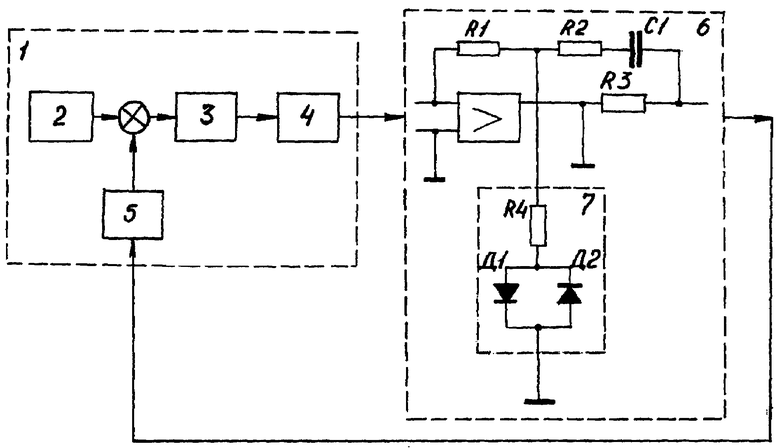
Компенсационный акселерометр, содержащий чувствительный элемент с датчиками силы и смещения, усилитель обратной связи и соединенный с общей точкой резистора, включенный на выходе усилителя последовательно с обмоткой датчика силы, отличающийся тем, что, с целью увеличения точности в динамических режимах, он снабжен цепочкой из последовательно соединенных конденсатора и двух резисторов, а также последовательно соединенными резистором, подключенным одним концом к точке соединения резисторов первой цепочки, и включенными встречно параллельно диодами, присоединенными к общей точке, при этом свободные концы конденсатора и резистора первой цепочки соединены с резистором в цепи датчика силы и входом усилителя соответственно.

