Изобретение относится к прецизионным маятниковым компенсационным акселерометрам, широко применяемым в автономных системах управления.
Задача повышения точности работы систем управления потребовала дальнейшего повышения точности и данного типа акселерометра.
Ряд составляющих погрешности маятникового компенсационного акселерометра определяется изменением углового положения подвижной системы чувствительного элемента (ЧЭ) вследствие изменения величины рабочего ускорения или появления внешнего гармонического воздействия (вибрации).
Задача минимизации угловых отклонений подвижной системы решается путем выбора оптимальных значений параметров отдельных узлов и всей замкнутой системы [Л1].
Дальнейшее уменьшение колебательности подвижной системы ЧЭ требует существенного изменения конструктивных параметров чувствительного элемента.
Дополнительная ошибка при воздействии вибрации возникает также при работе аналогового акселерометра с электронным преобразователем -"ток-частота" с интегрирующим конденсатором на входе [Л2].
Ошибка эта связана с тем, что, как правило, рабочее ускорение измеряемое акселерометром, имеет один знак и преобразователь с целью упрощения приборного решения работает лишь от одной полярности тока, поэтому при отрицательной полярности выходного тока (при отрицательной полуволне вибрации) интегрирующий конденсатор преобразователя включается последовательно с датчиком момента и вследствие увеличения сопротивления нагрузки усилителя увеличивается и амплитуда колебаний подвижной системы.
Целью предлагаемого изобретения является повышение точности прецизионных компенсационных маятниковых акселерометров в статических и динамических режимах работы. Сущность предлагаемого изобретения состоит в том, что в предлагаемом устройстве, благодаря охвату всего усилительного устройства маятникового компенсационного акселерометра нелинейной частотнозависимой отрицательной обратной связью по выходному току, существенно уменьшена величина углового перемещения подвижной системы как от изменения величины рабочего ускорения, так и от воздействия вибрации. Блок-схема устройства показана на фиг.1.
Акселерометр состоит из чувствительного элемента 1, включающего в себя элемент воспринимающий ускорение - маятник 2, подвижную систему 3, датчик угла 4 и датчик момента 5, а также усилительно-преобразовательное устройство 7, состоящее из усилительного устройства 6 и элементов корректирующего контура R1, C1, R3, С2 и нелинейного сопротивления R*2, величина которого уменьшается при увеличении амплитуды напряжения на нем.
Работает акселерометр следующим образом.
При отработке медленно-изменяющегося рабочего ускорения наличие конденсатора С2 в обратной связи придает астатизм по углу перемещения подвижной системы.
Параметры корректирующего контура, включая и величину сопротивления R*2 для малых амплитуд сигналов, выбирают таким образом, чтобы обеспечить малую величину колебательности по углу, а, следовательно, малую и виброошибку.
Однако система имеет в этом случае малый запас по фазе на частоте среза, необходимый лишь для обеспечения устойчивой работы.
Это обстоятельство обуславливает наличие большой величины показателя колебательности по току МI.
Наличие в обратной связи усилителя нелинейного сопротивления обеспечивает уменьшение величины МI при увеличении амплитуды вибрации благодаря перемещению частоты среза системы в область с большим запасом по фазе. В результате при всех возможных параметрах вибрации система работает в линейном диапазоне характеристик.
В то же время при вибрациях малой амплитуды или большой амплитуды, но с частотой отличной от частоты резонанса замкнутой системы по току акселерометр работает с малой колебательностью по углу подвижной системы, а, следовательно, и с малой виброошибкой.
Применение нелинейной обратной связи по выходному току позволяет иметь большое выходное сопротивление, особенно при больших амплитудах вибрации, и тем самым практически исключить увеличение ошибки от нелинейного включения интегрирующего конденсатора преобразователя.
Источники информации
1. Глазов А.В., Смирнов Е.С. "Выбор структурной схемы", Труды НИИАП, 1967 г. вып.3, стр.56-80.
2. Григорьев Л.П., Киселев Л.Н., Шестаков О.Н. "Дискретный маятниковый акселерометр", Труды НИИАП, 1967 г. вып.3, стр.80-91.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ДИСКРЕТНЫМ ВЫХОДОМ | 1974 |
|
SU1839856A1 |
| Компенсационный акселерометр | 1974 |
|
SU1839839A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1969 |
|
SU1839872A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2341805C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2478212C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ОПОР ТРЕНИЯ АКСЕЛЕРОМЕТРА | 1993 |
|
RU2039995C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
Изобретение относится к прецизионным маятниковым компенсационным акселерометрам и может быть использовано в автономных системах управления. Сущность: акселерометр содержит чувствительный элемент с датчиками смещения и силы, корректирующий контур и усилитель. Кроме того, между входом и выходом усилителя включены последовательно соединенные емкость и нелинейный резистор с отрицательной характеристикой. Технический результат: снижение интегральной погрешности под действием вибровозмущениий. 1 ил.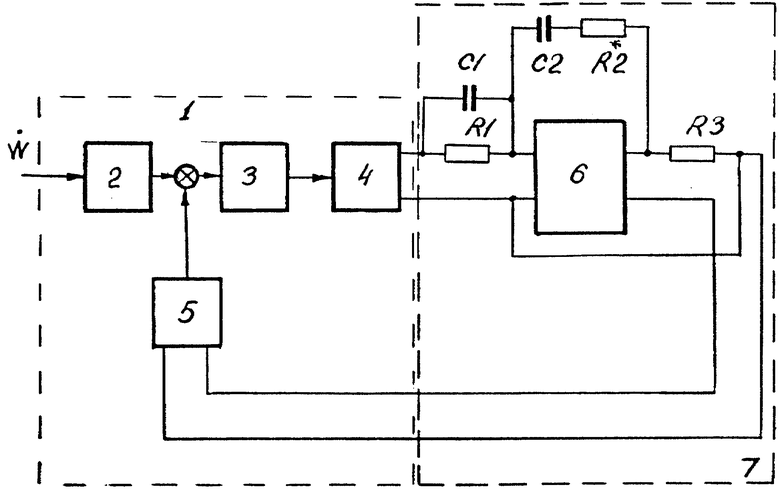
Компенсационный акселерометр, содержащий чувствительный элемент с датчиками смещения и силы, корректирующий контур и усилитель, отличающийся тем, что, с целью снижения интегральной погрешности под действием вибровозмущений, между входом и выходом усилителя включены последовательно соединенные емкость и нелинейный резистор с отрицательной характеристикой.

