Изобретение относится к области измерительной техники, а именно к прецизионным акселерометрам с компенсационным преобразованием для измерения линейных ускорений.
Известен компенсационный акселерометр, содержащий корпус, чувствительный элемент, датчик положения, подключенный к входу усилителя следящей системы, к выходу которого подключены компенсационная катушка магнитоэлектрического силового преобразователя и соединенный с ней масштабный резистор [1]
Недостатком такого акселерометра является постоянство разрешающей способности во всем диапазоне измеряемых ускорений, что ограничивает точность измерений на нижнем пределе измеряемых ускорений.
Наиболее близким по технической сущности является компенсационный акселерометр [2] содержащий корпус, чувствительный элемент, датчик положения, магнитоэлектрический силовой преобразователь с постоянным магнитом и компенсационной катушкой, усилитель акселерометра с корректирующим фильтром, масштабный резистор, причем датчик положения подключен к входу усилителя акселерометра, один вывод компенсационной катушки подсоединен к выводу масштабного резистора.
Недостатком такого компенсационного акселерометра является изменение полосы частот пропускания и динамической характеристики акселерометра при изменении коэффициента преобразования акселерометра путем включения или выключения масштабного резистора.
Техническим результатом изобретения является устранение влияния на динамические характеристики акселерометра изменения коэффициента преобразования акселерометра путем изменения суммарного сопротивления масштабных резисторов.
Указанный результат достигается тем, что в компенсационный акселерометр, содержащий чувствительный элемент, датчик положения, магнитоэлектрический силовой преобразователь с постоянным магнитом и компенсационной катушкой, усилитель акселерометра с корректирующим фильтром, масштабный резистор, причем датчик положения подключен к входу усилителя акселерометра, один вывод компенсационной катушки подсоединен к одному выводу масштабного резистора, введены дифференциальный усилитель постоянного тока с первым, вторым, третьим и четвертым резисторами обратной связи n (n-1) масштабных резисторов, к инверсионному входу дифференциального усилителя подключены выход усилителя акселерометра посредством входного резистора и первый резистор обратной связи, второй вывод которого подключен к выходу дифференциального усилителя, к прямому входу дифференциального усилителя подключены второй резистор обратной связи и третий резистор обратной связи, к выходу дифференциального усилителя подключен четвертый резистор обратной связи, свободные выводы третьего и четвертого резисторов обратной связи соединены со свободным выводом компенсационной катушки, свободные выводы второго резистора обратной связи и n-го масштабного резистора соединены с общей цепью усилителя акселерометра и дифференциального усилителя, причем сопротивления подключенных к дифференциальному усилителю резисторов выполнены в соответствии с условием:
R1R2=(R3+ R4)Rвх,
гдe
R1, R2, R3, R4 сопротивления первого, второго, третьего, четвертого резисторов обратной связи соответственно,
Rвх сопротивление входного резистора на инверсном входе дифференциального усилителя.
Путем введения в компенсационный акселерометр дифференциального усилителя постоянного тока с первым, вторым, третьим и четвертым резисторами обратной связи, подключение к его инверсному входу выхода усилителя постоянного тока и первого резистора обратной связи, подключения к прямому входу дифференциального усилителя второго и третьего резисторов обратной связи, подключения четвертого резистора обратной связи к выходу дифференциального усилителя, соединении свободных выводов третьего и четвертого резисторов обратной связи со свободным выводом компенсационной катушки, свободных выводов второго резистора обратной связи и n-го масштабного резистора с общей цепью усилителя акселерометра и дифференциального усилителя, выполнения сопротивления резистора Rвх на входе дифференциального усилителя, первого R1, второго R2, третьего R3 и четвертого R4 резисторов обратной связи в соответствии с условием
R1R2=(R3+R4)Rвх
достигается неизменность функции преобразования следящей системы акселерометра, так как при неизменных функциях преобразования чувствительного элемента, датчика положения, усилителя акселерометра, корректирующего фильтра, силового преобразователя вне зависимости от суммарного сопротивления масштабных резисторов коэффициент преобразования k дифференциального усилителя постоянного тока определяется соотношением:
где R1 сопротивление первого резистора обратной связи:
Rвх сопротивление резистора на инверсном входе дифференциального усилителя;
R4 сопротивление четвертого резистора обратной связи.
Поэтому при изменении коэффициента преобразования акселерометра путем включения или выключения одного или нескольких масштабных резисторов остаются неизменными динамические характеристики акселерометра, полоса его частот пропускания, сохраняется устойчивость следящей системы акселерометра.
На фиг. 1 изображен общий вид компенсационного акселерометра;
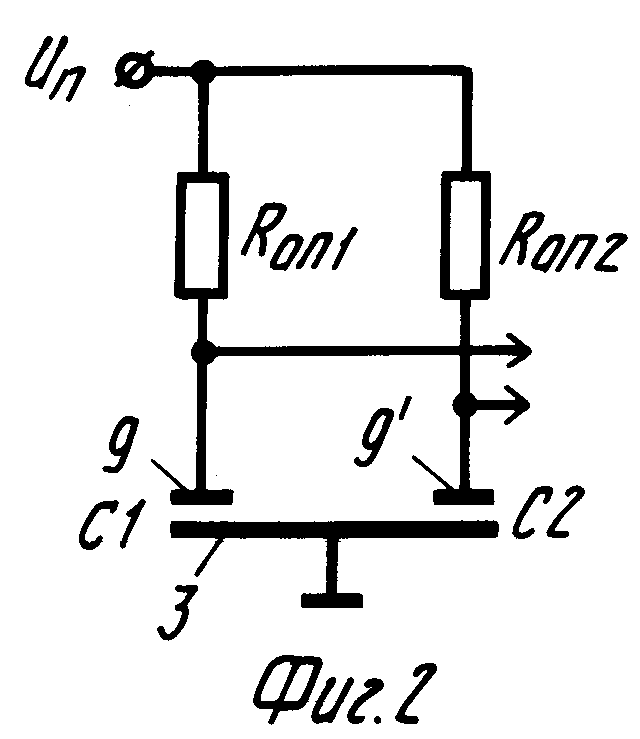
на фиг. 2 электрическая схема датчика положения акселерометра;
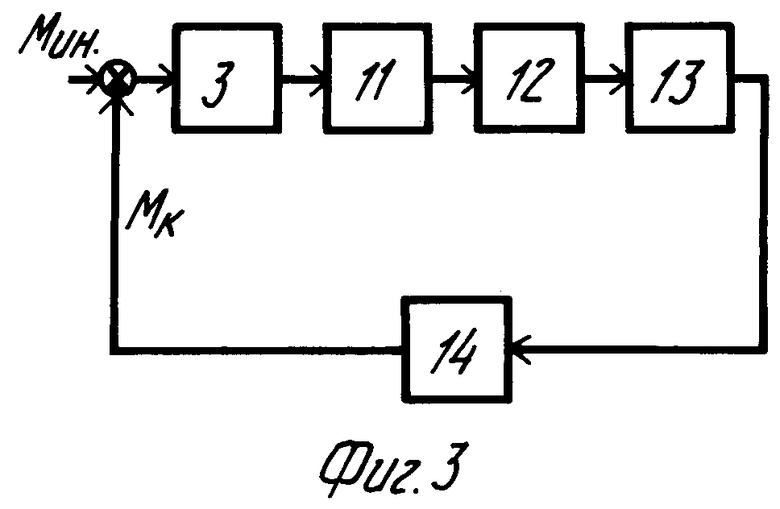
на фиг. 3 структурная схема компенсационного акселерометра.
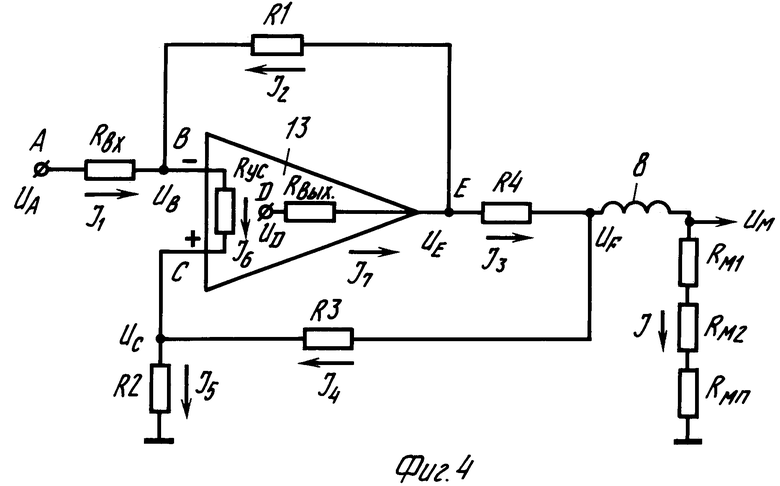
на фиг. 4 электрическая схема дифференциального усилителя постоянного тока с его нагрузкой.
Компенсационный акселерометр (фиг. 1) содержит корпус 1, в котором установлен чувствительный элемент 2 с подвижной частью 3 и неподвижной частью 4, которые соединены между собой посредством упругого шарнира 5. На подвижной части 3 чувствительного элемента 2 установлен груз 6. Магнитоэлектрический силовой преобразователь содержит установленный в корпусе 1 постоянный магнит 7 с диаметральным направлением намагничивания и компенсационную катушку 8 на подвижной части 3 чувствительного элемента 2. Неподвижные электроды 9, 9' емкостного датчика положения расположены на постоянном магните 7, а подвижный электрод выполнен в виде электропроводной поверхности подвижной части чувствительного элемента 2. Чувствительный элемент 2 может быть изготовлен, например, из монокристаллического кремния методом анизотропного травления.
Акселерометр закрыт крышкой 10. Датчик положения (фиг. 2) в компенсационном акселерометре выполнен по мостовой схеме и содержит конденсаторы C1, C2 и резисторы RДП1, RДП2. Конденсатор C1 образован неподвижным электродом 9 и электропроводной поверхностью подвижной части 3 чувствительного элемента 2. Конденсатор C2 образован неподвижной электродом 9' и электропроводной поверхностью подвижной части 3 чувствительного элемента 2. К одной диагонали мостовой схемы датчика положения подведено напряжение питания Uп от источника переменой ЭДС. Другая диагональ мостовой схемы использована для получения выходного сигнала UДп датчика положения.
Структурная схема (фиг. 3) компенсационного акселерометра включает в себя подвижную часть 3 чувствительного элемента 2, датчик положения 11, усилитель акселерометра 12 с корректирующим фильтром, дифференциальный усилитель 13 постоянного тока, магнитоэлектрический силовой преобразователь 14.
Инверсный вход дифференциального усилителя 13 (фиг. 4) посредством входного резистора Rвх подключен к выходу усилителя акселерометр 12. Первый резистор обратной связи R1 включен между инверсным входом и выходом дифференциального усилителя 13. К прямому входу дифференциального усилителя 13 подключены второй резистор обратной связи R2 и третий резистор обратной связи R3. К выходу дифференциального усилителя 13 подключен четвертый резистор обратной связи R4. Компенсационная катушка 8 силового преобразователя и масштабные резисторы RM1, RM2. RMn соединены последовательно, и свободный вывод компенсационной катушки 8 соединен со свободными выводами третьего резистора обратной связи R3 и четвертого резистора обратной связи R4. Свободные выводы резистора обратной связи R2 и n-го масштабного резистора соединены с общей цепью дифференциального усилителя 13 и усилителя 13 и усилителя акселерометра 12.
Сопротивления входного резистора, первого, второго, третьего и четвертого резисторов обратной связи выполнены такими, чтобы удовлетворять условию:
R1R2=(R3+R4)Rвх (3)
В качестве дифференциального усилителя 13 постоянного тока может быть применен операционный усилитель с высоким коэффициентом преобразования.
Компенсационный акселерометр (фиг. 1.3) работает следующим образом. При наличии ускорения на подвижную часть 3 с грузом воздействует инерционный момент (мин), который вызывает угловое перемещение подвижной части 3 чувствительного элемента 2 относительно неподвижной части 4. Пусть направление ускорения таково, что нижняя часть подвижной части 3 чувствительного элемента 2 приближается к неподвижному электроду 9, а ее верхняя часть отдаляется от неподвижного электрода 9'. Тогда емкость конденсатора C1 увеличивается, емкость конденсатора C2 уменьшается, происходит разбаланс мостовой схемы датчика положения 11, и с выходной диагонали датчика положения 11, на усилитель акселерометра 12 поступает переменный сигнал рассогласования следящей системы. После его усиления и преобразования в сигнал постоянного тока в усилителе акселерометра 12, преобразования по мощности и напряжению в дифференциальном усилителе 13 постоянное напряжение на выходе дифференциального усилителя 13 преобразуется в постоянный ток посредством цепи, состоящей из последовательно включенных компенсационной катушки 8 и масштабных резисторов RM1, RM2RMn (фиг. 4). Этот ток, проходя через компенсационную катушку 8 магнитоэлектрического силового преобразователя 14, создает магнитное поле, которое взаимодействует с магнитным полем постоянного магнита 7. В результате в магнитоэлектрическом силовом преобразователе 14 создается компенсационный момент Мк, воздействие которого на подвижную часть 3 чувствительного элемента 2 уравновешивает воздействие инерционного момента. При этом подвижная часть 3 чувствительного элемента 2 возвращается в исходное положение.
Ток компенсационной катушки 8, проходя через масштабные резисторы RM1, RM2.RMn, создает на них падение напряжения UM, которое пропорционально измеряемому ускорению и является выходным сигналом акселерометра.
Коэффициент преобразования акселерометра, определяемый отношением выходного напряжения акселерометра UM к измеряемому ускорению, может изменяться в зависимости от режима работы акселерометра и от требований потребителя путем включения или нескольких масштабных резисторов из числа RM1, RM2.RMn масштабных резисторов.
При изменении нагрузки дифференциального усилителя 13 постоянного тока путем изменения суммарного сопротивления масштабных резисторов RM1, RM2.RMn коэффициент преобразования k дифференциального усилителя 13 постоянного тока не изменяется.
Так как функции преобразования подвижной части 3 чувствительного элемента 2, датчика положения 11, усилителя акселерометра 12, магнитоэлектрического силового преобразователя 14 для данного типа акселерометра неизменны, а коэффициент преобразования дифференциального усилителя постоянного тока 13 не зависит от суммарного сопротивления масштабных резисторов RM1, RM2.RMn, остается неизменной при любом суммарном сопротивлении масштабных резисторов RM1, RM2.RMn, то передаточная функция следящей системы акселерометра остается неизменной при любом суммарном сопротивлении масштабных резисторов RM1, RM2. RMn сохраняются устойчивость акселерометра, его динамические характеристики и полоса частот пропускания акселерометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199755C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2107301C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155965C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2128325C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149412C1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2000 |
|
RU2184937C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1998 |
|
RU2140653C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199754C2 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2210781C2 |
Использование: в области измерительной техники, а именно в прецизионных акселерометрах с компенсационным преобразованием для измерения линейных ускорений. Сущность изобретения: компенсационный акселерометр, содержит чувствительный элемент, датчик положения, магнитоэлектрический силовой преобразователь, усилитель акселерометра с корректирующим фильтром, n /n=1, 2.../ последовательно соединенных масштабных резисторов, дифференциальный усилитель с первым, вторым, третьим и четвертым резисторами обратной связи, к инверсному входу дифференциального усилителя подключен первый резистор обратной связи, к прямому входу подключены второй и третий резисторы обратной связи, к выходу дифференциального усилителя подключены свободный вывод первого резистора обратной связи и четвертый резистор обратной связи, к свободному выводу четвертого резистора обратной связи подключены свободные выводы третьего резистора обратной связи и компенсационной катушки. 4 ил.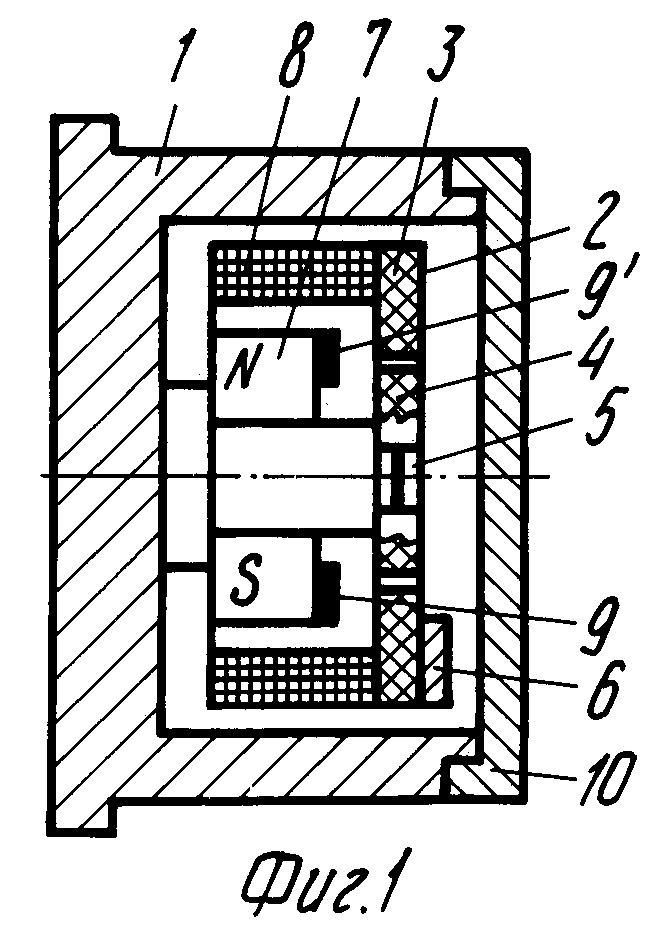
Компенсационный акселерометр, содержащий чувствительный элемент, датчик положения, магнитоэлектрический силовой преобразователь с постоянным магнитом и компенсационной катушкой, усилитель акселерометра с корректирующим фильтром, масштабный резистор, причем датчик положения подключен к входу усилителя акселерометра, один вывод компенсационной катушки подсоединен к первому выводу масштабного резистора, отличающийся тем, что введены дифференциальный усилитель постоянного тока с первым, вторым, третьим и четвертым резисторами обратной связи и n-1 масштабных резисторов, при этом все n масштабных резисторов соединены последовательно, к инверсному входу дифференциального усилителя подключены выход усилителя акселерометра посредством входного резистора и первый резистор обратной связи, второй вывод которого подключен к выходу дифференциального усилителя, к прямому входу дифференциального усилителя подключены первые выводы второго резистора обратной связи и третьего резистора обратной связи, к выходу дифференциального усилителя подключен первый вывод четвертого резистора обратной связи, вторые выводы третьего и четвертого резисторов обратной связи соединены с вторым выводом компенсационной катушки, вторые выводы второго резистора обратной связи и n-го масштабного резистора соединены с общей цепью усилителя акселерометра и дифференциального усилителя, причем сопротивления подключенных к дифференциальному усилителю резисторов выполнены в соответствии с условием
R1R2 (R3 + R4)Rв х,
где R1, R2, R3, R4 сопротивление первого, второго, третьего, четвертого резисторов обратной связи соответственно;
Rв х сопротивление входного резистора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4507965, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Компенсационный акселерометр | 1990 |
|
SU1795374A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
