Изобретение относится к области приборостроения и может быть использовано при регулировке акселерометров.
Наиболее близким к заявляемому изобретению является способ регулировки маятниковых компенсационных акселерометров, содержащий операции ориентации расположенной на корпусе базовой зеркальной плоскости в горизонт, поворота акселерометра вокруг оси подвеса до положения осью чувствительности в горизонт, измерения угла поворота, воздействия дестабилизирующих факторов, вновь измерения угла поворота акселерометра из положения базовой зеркальной плоскостью в горизонт до положения осью чувствительности в горизонт, определения разности этих углов, по которой судят о величине нестабильности положения оси чувствительности и, в случае превышения этой нестабильности допустимой величины, забракования акселерометра.
Недостатком данного способа является то, что невозможно точно определить узел акселерометра, который вызвал повышенную нестабильность оси чувствительности, что приводит к необходимости выпускать менее точные акселерометры или браковать их.
К современным типам акселерометров, у которых для повышения стабильности положения оси чувствительности применяется ″дифференциальный″ (двойной) датчик угла, исключающий нестабильность оси чувствительности от действия боковых ускорений при маневрах изделия и представляющий собой две пары фотоприемников с излучателями, расположенных с двух сторон модулятора светового потока симметрично оси вращения подвижной части акселерометра, предъявляются повышенные требования к долговременной нестабильности положения оси чувствительности.
Целью настоящего изобретения является повышение точности маятникового компенсационного акселерометра с фотоэлектрическим дифференциальным датчиком угла.
Поставленная цель достигается тем, что до и после воздействия дестабилизирующих факторов измеряют угол между осью чувствительности и базовой плоскостью, устанавливают акселерометр базовой плоскостью в горизонт, разворачивают его вокруг оси подвеса подвижной части до положения, при котором сигнал пары фотоприемников, расположенных у одного из плеч модулятора, равен нулю, измеряют угол этого поворота, вновь разворачивают акселерометр вокруг оси подвеса подвижной части до положения, при котором сигнал второй пары фотоприемников, расположенных у другого плеча модулятора, равен нулю, измеряют угол этого поворота, по стабильности измеренных углов судят о причинах нестабильности положения оси чувствительности и заменяют выявленный нестабильный узел.
Внесенные новые операции предлагаемого способа обеспечивают выявление нестабильного узла, определяющего нестабильность положения оси чувствительности маятникового компенсационного акселерометра с фотоэлектрическим дифференциальным датчиком угла.
Способ содержит следующие операции:
- измеряют угол между осью чувствительности и базовой зеркальной плоскостью, расположенной на корпусе акселерометра;
- устанавливают акселерометр базовой плоскостью в горизонт;
- разворачивают акселерометр вокруг оси подвеса подвижной части до положения, при котором сигнал пары фотоприемников, расположенных у одного из плеч модулятора, равен нулю;
- измеряют угол этого поворота;
- вновь разворачивают акселерометр вокруг оси подвеса подвижной части до положения, при котором сигнал второй пары фотоприемников, расположенных у другого плеча модулятора, равен нулю;
- измеряют угол этого поворота;
- подвергают акселерометр воздействию дестабилизирующих факторов (время, температура, перегрузки, механические воздействия и т.д.);
- вновь измеряют угол между осью чувствительности и базовой плоскостью, угол между электрическим "нулем" одной пары фотоприемников и базовой плоскостью и угол между электрическими "нулями" обеих пар фотоприемников;
- сравнивают значения измеренных до и после воздействия дестабилизирующих факторов углов;
- по нестабильности этих значений судят о причинах нестабильности положения оси чувствительности акселерометра (нестабильный датчик угла, нестабильная пара фотоприемников, нестабильное положение центра масс подвижной части и т.д.);
- заменяют выявленный нестабильный узел акселерометра (корпус датчика угла, пару фотоприемников, подвижную систему и т.д.).
Предлагаемый способ может быть реализован при помощи устройства, схема которого представлена на чертеже, где:
1, 2, 3, 4 - фотоприемники,
5 - корпус акселерометра,
6 - базовая зеркальная плоскость,
7 - измеритель горизонтальности базовой плоскости,
8 - подвижная часть,
9 - модулятор,
10 - маятник,
11, 12, 15 - коммутирующие элементы,
13 - измеритель выходного сигнала датчика угла,
14 - электронная часть акселерометра,
16 - обратная связь,
17 - технологическое приспособление,
18 - измеритель разворота акселерометра.
Регулировка акселерометра осуществляется следующим образом:
- устанавливают базовую плоскость 6, жестко закрепленную на корпусе акселерометра 5, в горизонт с помощью измерителя 7 (автоколлиматора);
- разворачивают акселерометр 5 с помощью технологического приспособления 17 вокруг оси подвеса подвижной части 8 и устанавливают его в положение, при котором выходной сигнал равен нулю (осью чувствительности в горизонт);
- измеряют угол этого поворота измерителем 18, т.е. угол между осью чувствительности и базовой плоскостью 6;
- устанавливают базовую плоскость 6 в горизонт;
- разрывают обратную связь 16 акселерометра коммутационным элементом 15 и отсоединяют пару фотоприемников 3, 4 коммутационным элементом 12 от измерителя 13;
- разворачивают акселерометр 5 вокруг оси подвеса подвижной части 8 и устанавливают его в положение, при котором сигнал пары фотоприемников 1, 2 равен нулю;
- измеряют угол этого поворота, т.е. угол между электрическим "нулем" пары фотоприемников 1, 2 и базовой плоскостью 6;
- коммутирующим элементом 11 отключают пару фотоприемников 1, 2, а элементом 12 подключают пару фотоприемников 3, 4 к измерителю 13;
- разворачивают акселерометр 5 вокруг оси подвеса подвижной части 8 и устанавливают его в положение, при котором сигнал пары фотоприемников 3, 4 равен нулю;
- измеряют угол этого поворота, т.е. угол между электрическими "нулями" пар фотоприемников 1, 2 и 3, 4;
- подвергают акселерометр 5 воздействию дестабилизирующих факторов (время, температура, перегрузки и т.д.);
- вновь измеряют угол между осью чувствительности и базовой плоскостью 6, угол между электрическим "нулем" пары фотоприемников 1, 2 и базовой плоскостью 6 и угол между электрическими "нулями" пар фотоприемников 1, 2 и 3, 4;
- сравнивают значения измеренных до и после воздействия дестабилизирующих факторов углов;
- по нестабильности этих значений судят о причинах нестабильности положения оси чувствительности акселерометра, которое определяется углом между осью чувствительности и базовой плоскостью, например, если угол между электрическим "нулем" пары фотоприемников 1, 2 и базовой плоскостью 6 и угол между электрическими "нулями" пар фотоприемников 1, 2 и 3, 4 остались неизменными, то нестабильным узлом является подвижная часть 8, или, например, если угол между электрическим "нулем" пары фотоприемников 1, 2 и базовой плоскостью 6 остался неизменным, а угол между электрическими "нулями" пар фотоприемников 1, 2 и 3, 4 изменился, то нестабильным узлом является пара фотоприемников 3, 4, или, например, если угол между электрическим "нулем" пары фотоприемников 1, 2 и базовой плоскостью 6 изменился, а угол между электрическими "нулями" пар фотоприемников 1, 2 и 3, 4 остался неизменным, то нестабильным узлом является узел крепления датчика угла, и т.д.;
- заменяют выявленный нестабильный узел акселерометра.
Предлагаемый способ позволяет повысить стабильность положения оси чувствительности, а следовательно, и точность акселерометра, так как проводя повторную регулировку выявленного нестабильного узла или, в случае необходимости, замену его или части его элементов, добиваются устранения причины нестабильности акселерометра. Для реализации способа не требуется дополнительного технологического оборудования и измерительных приборов.
Лабораторные испытания подтвердили возможность точного выявления нестабильного узла, который вызвал повышенную нестабильность положения оси чувствительности акселерометра.
Таким образом, предлагаемый способ позволяет значительно уменьшить нестабильность положения оси чувствительности, а следовательно, повысить точность маятникового компенсационного акселерометра с фотоэлектрическим дифференциальным датчиком угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВКИ ПОЛОЖЕНИЯ ОСИ ЧУВСТВИТЕЛЬНОСТИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1983 |
|
SU1840732A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАБИЛЬНОСТИ ПОЛОЖЕНИЯ ОСИ ЧУВСТВИТЕЛЬНОСТИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1978 |
|
SU1839841A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| СПОСОБ РЕГУЛИРОВКИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1983 |
|
SU1839973A1 |
| СПОСОБ УМЕНЬШЕНИЯ ЧУВСТВИТЕЛЬНОСТИ ВИБРОЧАСТОТНОГО АКСЕЛЕРОМЕТРА К БОКОВОМУ УСКОРЕНИЮ | 2019 |
|
RU2718474C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ И СПОСОБ КОМПЕНСАЦИИ ДРЕЙФА НУЛЕВОГО СИГНАЛА ГИДРОДИНАМИЧЕСКОГО ГИРОКОМПАСА | 2004 |
|
RU2270419C1 |
| Маятниковый компенсационный акселерометр | 1990 |
|
SU1742733A1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
Изобретение относится к области приборостроения и может быть использовано при регулировке акселерометров. Сущность: регулировка маятникового компенсационного акселерометра с фотоэлектрическим дифференциальным датчиком угла осуществляется путем измерения угла между осью чувствительности и базовой плоскостью до и после воздействия дестабилизирующих факторов. При этом акселерометр устанавливают базовой плоскостью в горизонт. Затем разворачивают его вокруг оси подвеса подвижной части до положения, при котором сигнал пары фотоприемников равен нулю. При этом фотоприемники расположены у одного из плеч модулятора. После этого измеряют угол этого поворота. После этого вновь разворачивают акселерометр вокруг оси подвеса подвижной части до положения, при котором сигнал второй пары фотоприемников, расположенных у другого плеча модулятора, равен нулю. Измеряют угол этого поворота. По стабильности измеренных углов судят о причинах нестабильности положения оси чувствительности. При необходимости заменяют выявленный нестабильный узел. Технический результат: повышение точности. 1 ил.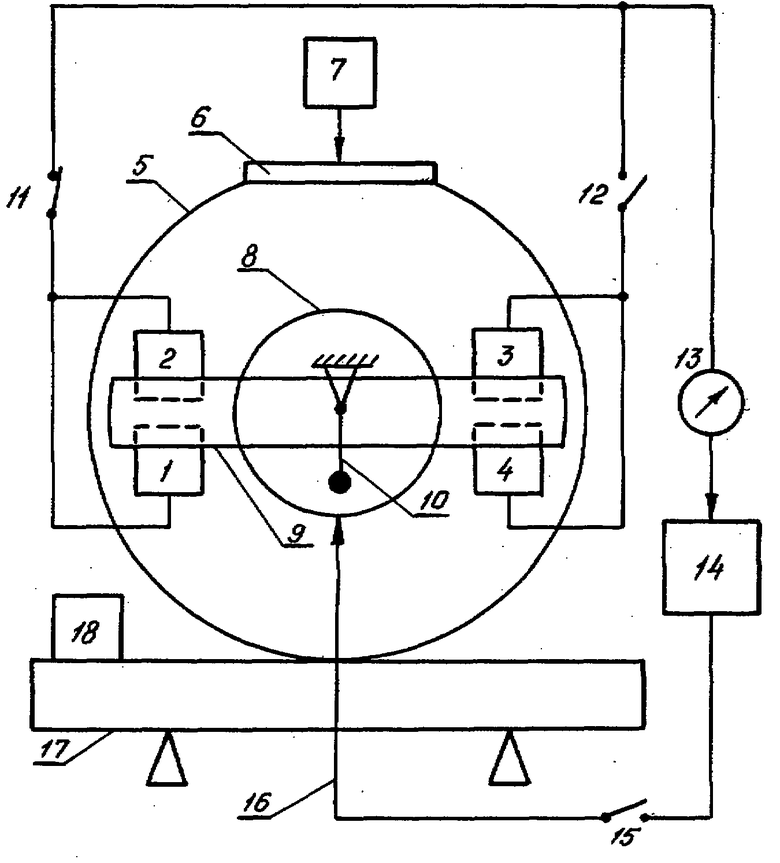
Способ регулировки маятникового компенсационного акселерометра с фотоэлектрическим дифференциальным датчиком угла путем измерения угла между осью чувствительности и базовой плоскостью до и после воздействия дестабилизирующих факторов, отличающийся тем, что, с целью повышения точности, устанавливают акселерометр базовой плоскостью в горизонт, разворачивают его вокруг оси подвеса подвижной части до положения, при котором сигнал пары фотоприемников, расположенных у одного из плеч модулятора, равен нулю, измеряют угол этого поворота, вновь разворачивают акселерометр вокруг оси подвеса подвижной части до положения, при котором сигнал второй пары фотоприемников, расположенных у другого плеча модулятора, равен нулю, измеряют угол этого поворота, по стабильности измеренных углов судят о причинах нестабильности положения оси чувствительности и заменяют выявленный нестабильный узел.

