Предлагаемое изобретение относится к области приборостроения и может быть использовано при изготовлении маятниковых компенсационных акселерометров.
Известен способ выставки оси чувствительности маятникового компенсационного акселерометра путем конструктивной установки датчика угла в заданное положение (Е.А.Никитин, А.А.Балашова, "Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров" изд. "Машиностроение", Москва, 1969 г. стр.172), который является наиболее близким потехнической сущности к заявляемому объекту.
В этом случае положение датчика угла, а следовательно, и оси чувствительности определяется конструктивными допусками и посадками на геометрические размеры деталей и узлов акселерометра.
При использовании датчика угла фотоэлектрического типа это приводит к тому, что не обеспечивается равномерность освещенности фотоприемников. Особенно этот недостаток известного способа проявляется при использовании "дифференциального" (двойного) датчика угла, который для обеспечения стабильности оси чувствительности вне зависимости от действия продольных и боковых ускорений при маневрах ракеты представляет собой две пары фотоприемников и два излучателя, расположенных с двух сторон модулятора относительно оси вращения подвижной системы акселерометра.
При таком датчике угла особенно важна равномерность освещенности фотоприемников, что не обеспечивается в известном способе, в котором при нулевом выходном сигнале дифференциального датчика угла сигнала пар фотоприемников равны по величине, но противоположны по знаку, отличны от нуля.
Следовательно, освещенность фотоприемников каждый пары не равномерна, что, как известно, приводит к повышенной нестабильности нулевого сигнала дифференциального фотоэлектрического датчика угла из-за температурных, временных и т.п. воздействий, а следовательно, и нестабильности оси чувствительности.
Целью настоящего изобретения является повышение точности маятникового компенсационного акселерометра с фотоэлектрическим дифференциальным датчиком угла.
Указанная цель достигается тем, что устанавливают акселерометр маятником вниз, измеряют сигнал пары фотоприемников, расположенных у одного из плеч модулятора, разворачивают акселерометр вокруг оси вращения подвижной системы и устанавливают его в положение, при котором этот сигнал равен нулю, измеряют выходной сигнал пары фотоприемников, расположенных у другого плеча модулятора, перемещают эту пару фотоприемников вдоль направления модулятора до положения, при котором их выходной сигнал равен нулю, закрепляют фотоприемники в этом положении.
Предлагаемый способ включает в себя следующие операции.
1. Устанавливают акселерометр с помощью поворотного технологического приспособления в положение, при котором ось подвеса подвижной системы горизонтальна, а маятник направлен вниз.
2. Разрывают обратную связь акселерометра, и измеряют сигнал пары фотоприемников, расположенных у одного из плеч модулятора.
3. Разворачивают акселерометр вокруг оси вращения подвижной системы до положения, при котором сигнал с этой пары фотоприемников будет равен нулю.
4. Закрепляют акселерометр в этом положении.
5. Измеряют выходной сигнал пары фотоприемников, расположенных у другого плеча модулятора.
6. Перемещают эту пару фотоприемников вдоль направления перемещения модулятора до положения, при котором их выходной сигнал будет равен нулю.
7. Закрепляют фотоприемники в этом положении.
Предлагаемый способ регулировки положения оси чувствительности маятникового компенсационного акселерометра может быть реализован при помощи устройства, блок-схема которого представлена на чертеже, где
1 - корпус акселерометра,
2 - ось подвеса,
3 - маятник,
4 - модулятор,
5 - обратная связь,
6, 7 - пара фотоприемников,
8 - подвижная система,
9 - поворотное технологическое приспособление.
Регулировка маятникового компенсационного акселерометра предлагаемым способом осуществляется следующим образом:
устанавливают акселерометр (1) с помощью поворотного технологического приспособления (9) в положение, при котором маятник (3) направлен вниз, а ось подвеса (2) подвижной системы (8) горизонтальна;
разрывают обратную связь (5) акселерометра;
измеряют выходной сигнал пары фотоприемников (6), расположенных у одного плеча модулятора;
с помощью поворотного технологического приспособления (9) разворачивают акселерометр вокруг оси подвеса (2) до положения, при котором выходной сигнал пары фотоприемников (6) будет равен нулю;
закрепляют акселерометр (1) в этом положении;
измеряют выходной сигнал пары фотоприемников (6, 7), расположенных у другого плеча модулятора (4);
перемещают эту пару фотоприемников (6, 7) вдоль направления перемещения модулятора до положения, при котором сигнал с этой пары фотоприемников (6, 7) будет равен нулю;
закрепляют пару фотоприемников (6, 7) в данном положении.
Таким образом, при регулировке акселерометра предложенным способом проводится полное симметрирование световых потоков излучателей датчика угла, воспринимаемых фотоприемниками.
В современных типах акселерометров в качестве пар фотоприемников используются бифотодиоды (например, ФД 20-32К), представляющие две светочувствительные пластины, имеющие практически идентичные характеристики и расположенные в одном корпусе. При симметрировании светового потока, воспринимаемого фотоприемниками, соединенными по дифференциальной схеме, значительно повышается стабильность их выходного нулевого сигнала, т.к. при действии дестабилизирующих факторов (время, температура и т.п.) световой поток излучателя меняется, и, следовательно, меняется и выходной сигнал каждого фотоприемника, но, учитывая идентичность характеристик пар фотоприемников, их суммарный нулевой сигнал не изменится.
При отсутствии симметрирования светового потока между фотоприемниками сигнал с них будет меняться пропорционально величине их освещенности, а значит, нулевой выходной сигнал датчика угла изменится. Это приведет к нестабильности положения оси чувствительности акселерометра.
Предлагаемый способ технологичен, позволяет проводить выставку оси чувствительности с высокой точностью.
Таким образом, предлагаемый способ позволяет существенно повысить стабильность положения оси чувствительности маятникового компенсационного акселерометра с дифференциальным фотоэлектрическим датчиком угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВКИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1984 |
|
SU1839861A1 |
| СПОСОБ УМЕНЬШЕНИЯ ЧУВСТВИТЕЛЬНОСТИ ВИБРОЧАСТОТНОГО АКСЕЛЕРОМЕТРА К БОКОВОМУ УСКОРЕНИЮ | 2019 |
|
RU2718474C1 |
| СПОСОБ РЕГУЛИРОВКИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1983 |
|
SU1839973A1 |
| Акселерометр | 1978 |
|
SU748300A1 |
| СПОСОБ РЕГУЛИРОВКИ ПАРАМЕТРОВ ПОПЛАВКОВОГО АКСЕЛЕРОМЕТРА С ФОТОЭЛЕКТРИЧЕСКИМ ДАТЧИКОМ УГЛА | 1978 |
|
SU1840669A1 |
| Маятниковый компенсационный акселерометр | 1990 |
|
SU1742733A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| Акселерометр | 1980 |
|
SU901915A1 |
Изобретение относится к области приборостроения и может быть использовано при изготовлении маятниковых компенсационных акселерометров. Способ регулировки положения оси чувствительности маятникового компенсационного акселерометра с фотоэлектрическим дифференциальным датчиком угла путем выбора положения его узлов и элементов и измерения выходного сигнала, причем устанавливают акселерометр маятником вниз, измеряют сигнал пары фотоприемников, расположенных у одного из плеч модулятора, разворачивают акселерометр вокруг оси вращения подвижной системы, устанавливают его в положение, при котором этот сигнал равен нулю, измеряют выходной сигнал пары фотоприемников, расположенных у другого плеча модулятора, перемещают эту пару фотоприемников вдоль направления перемещения модулятора до положения, при котором их выходной сигнал равен нулю и закрепляют фотоприемники в этом положении. Технический результат - повышение точности. 1 ил.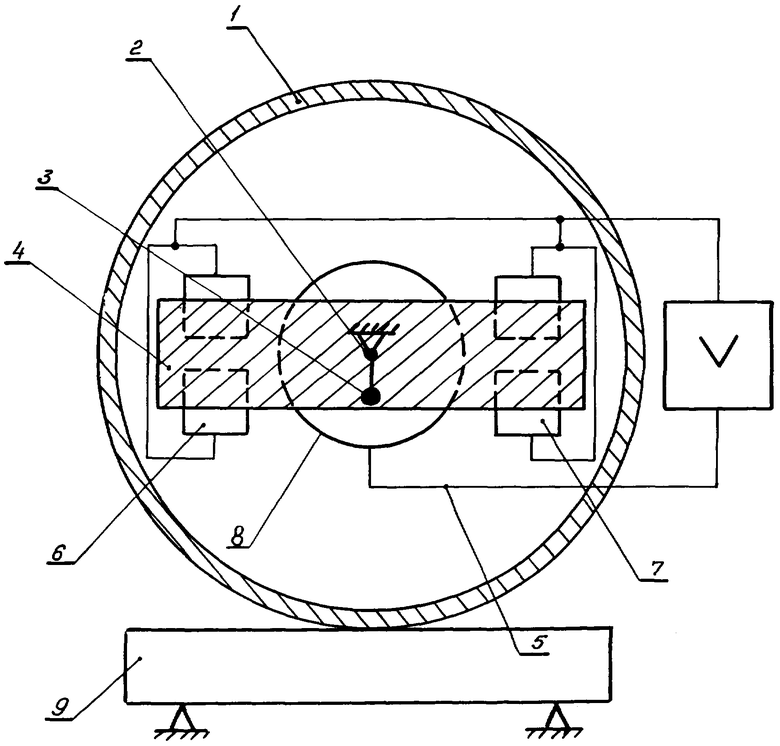
Способ регулировки положения оси чувствительности маятникового компенсационного акселерометра с фотоэлектрическим дифференциальным датчиком угла путем выбора положения его узлов и элементов и измерения выходного сигнала датчика угла, отличающийся тем, что, с целью повышения точности, устанавливают акселерометр маяником вниз, измеряют сигнал пары фотоприемников, расположенных у одного из плеч модулятора, разворачивают акселерометр вокруг оси вращения подвижной системы, устанавливают его в положение, при котором этот сигнал равен нулю, измеряют выходной сигнал пары фотоприемников, расположенных у другого плеча модулятора, перемещают эту пару фотоприемников вдоль направления перемещения модулятора до положения, при котором их выходной сигнал равен нулю и закрепляют фотоприемники в этом положении.
| Е.А.Никитин, А.А.Балашова | |||
| Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров, М., Машиностроение, 1969, стр.172. |

