Техническое решение относится к области гироскопической техники и может быть использовано для реализации гидродинамического гирокомпаса низко- и высокодинамичных объектов управления.
Прототипом для данного технического решения выбран способ гирокомпасировния /3/, стр. 185, включающий ориентацию оси собственного вращения гироскопа на север и установку ее на горизонтальную платформу, размещенную на оси двигателя разворота вокруг вертикальной оси.
Недостатком прототипа является отсутствие рекомендаций, позволяющих осуществить гирокомпасирование с использованием в качестве чувствительного элемента гидродинамического гироскопа как двухкоординатного гиротахометра /стр. 101 /1//. Прототипом для способа компенсации дрейфа гидродинамического гирокомпаса выбран способ /2/, в котором устанавливают ось собственного вращения гироскопа горизонтально и разворачивают его вокруг оси собственного вращении. Недостатком этого прототипа является отсутствие рекомендаций по компенсации дрейфа нулевого сигнала гидродинамического гирокомпаса.
Причина формирования дрейфа нулевого сигнала связана с реализацией подвеса поплавка с технологическими искажениями при изготовлении его элементов /стр. 104 /1//, величина которого соизмерима с составляющими скорости вращения Земли. В связи с этим для увеличения порога чувствительности гироскопа предложена компенсация дрейфа нулевого сигнала.
Задача технического решения - реализация подвеса чувствительного элемента гидродинамического гироскопа, обеспечивающего гирокомпасирование как низкодинамичного, так и перегрузочного варианта гирокомпаса. А кроме того, в рамках данного технического решения дополнительно предложен способ обеспечения компенсации дрейфа нулевого сигнала гидродинамического гироскопа, позволяющий сформировать достаточный порог чувствительности для измерения составляющих угловой скорости вращения Земли.
Решение задачи состоит в том, что способ гирокомпасирования, включающий ориентацию оси собственного вращения гироскопа на север и установку ее на горизонтальную платформу, размещенную на оси двигателя разворота вокруг вертикальной оси, имеет особенность такую, что в качестве гироскопа используют гидродинамический гироскоп, перед установкой на горизонтальную платформу осуществляют компенсацию дрейфа нулевого сигнала гироскопа, устанавливают гироскоп на вертикальную ось вертикальной внутренней рамки карданова подвеса, а на горизонтальную ось вертикальной внутренней рамки устанавливают первый двигатель стабилизации, внутреннюю рамку устанавливают в наружную горизонтальную рамку, на одну из горизонтальной оси которой устанавливают второй двигатель стабилизации, устанавливают на внутренней вертикальной рамке двухкоординатный формирователь сигналов об отклонении платформы от горизонтальной плоскости, формируют каналы горизонтальной стабилизации платформы, где установлен гидродинамический гироскоп, формируют каналы поворота оси собственного вращения гироскопа на север и коррекции разворота оси собственного вращения на север, при отклонении внутренней рамки от вертикали, а наружной рамки от плоскости горизонта замыкают соответствующие цепи формирователя сигналов об отклонении платформы от горизонтальной плоскости на двигатели стабилизации и формируют при этом моменты вокруг соответствующих осей и таким образом возвращают рамки в исходное положение, а вертикальную составляющую скорости вращения Земли компенсируют так, что формируют корректирующий момент вокруг вертикальной оси горизонтальной платформы, где установлен гироскоп, и разворачивают при этом ось собственного вращения с угловой скоростью, близкой вертикальной составляющей угловой скорости вращения Земли, так, чтобы она сохраняла установленное ранее направление на север, при отклонении оси собственного вращения от направления на север формируют приращение величины разворачивающего момента вокруг вертикальной оси и совмещают при этом ось собственного вращения с направлением на север, отсчитывают курсовой угол поворота основания относительно оси собственного вращения, а его угол тангажа и крена относительно горизонтальной рамки карданова подвеса, где установлен гидродинамический гироскоп, при этом для перегрузочного варианта гирокомпаса частично заполняют камеру подвеса поплавка жидкостью, обеспечивают при этом нейтральную аксиальную плавучесть поплавка, и собственное вращение подвеса, а для низкодинамичного варианта гирокомпаса заполняют радиальный зазор подвеса несмешивающимися жидкостями различной плотности, обеспечивая положительную аксиальную плавучесть поплавка и собственное вращение поплавковой камеры, причем жидкость большей плотности размещают в торцевых частях подвеса, и регулируют положение поплавка путем перераспределения объемов жидкости различной плотности в торцевых частях подвеса.
Формирователь сигналов об отклонении платформы от плоскости горизонта реализуют так, что используют двух координатный жидкостной маятниковый переключатель или гидродинамический гироскоп с вертикально ориентированной осью собственного вращения и аксиальным смещением центра масс.
Формируют каналы горизонтальной стабилизации так, что соединяют одну пару контактов маятникового переключателя или выход системы съема сигнала гидродинамического гироскопа с аксиальным смещением центра масс относительно первой оси чувствительности с первым двигателем стабилизации, другую пару контактов или второй выход системы съема сигнала гидродинамического гироскопа относительно второй оси чувствительности соединяют со вторым двигателем стабилизации.
Формируют канал разворота оси собственного вращения на север так, что устанавливают одну из осей чувствительности гироскопа вертикально, соединяют датчик угла отклонения поплавка в горизонтальной плоскости через преобразующие устройства с первым входом сумматора, а его выход соединяют через усилитель мощности с датчиком разворота горизонтальной платформы вокруг вертикальной оси.
Формируют канал коррекции разворота оси собственного вращения гироскопа на север так, что устанавливают вторую ось чувствительности перпендикулярно меридиану, соединяют датчик угла отклонения поплавка в вертикальной плоскости с преобразующим устройством коррекции направления оси собственного вращения на север и вторым входом сумматора.
Вертикальную составляющую угловой скорости вращения Земли компенсируют корректирующим моментом так, что отклоняют поплавок в горизонтальной плоскости относительно камеры и формируют при этом сигнал с выхода датчика угла и подают его через преобразующее устройство на первый вход сумматора и далее через усилитель мощности на датчик разворота горизонтальной платформы вокруг вертикальной оси с установленным на ней гидродинамическим гироскопом.
Формируют приращение величины разворачивающего момента вокруг вертикальной оси так, что формируют отклонение поплавка в вертикальной плоскости за счет появившейся неперпендикулярности второй горизонтальной оси чувствительности гироскопа и горизонтальной составляющей угловой скорости вращения Земли, преобразуют этот угол отклонения в сигнал и подают его на второй вход сумматора и далее через усилитель мощности на двигатель разворота горизонтальной платформы вокруг вертикальной оси.
Решение задачи сводится к тому, что способ компенсации дрейфа нулевого сигнала гидродинамического гирокомпаса, в котором устанавливают ось собственного вращения гироскопа горизонтально и разворачивают вокруг оси собственного вращении, имеет особенность такую, что при развороте его вокруг оси собственного вращения находят величину наибольшего Имах и наименьшего Имин выходного сигнала гироскопа, вычисляют величину дрейфа нулевого сигнала гироскопа по формуле /Имах-Имин/ /2= Ио, фиксируют гироскоп в положении, где зафиксирован наибольший выходной сигнал, и устанавливают обмотки опорного напряжения одну соответственно вертикальной оси, а другую горизонтальной оси чувствительности гироскопа, осуществляют алгебраическое суммирование компенсационного сигнала, полученного из опорного напряжения гироскопа, и его выходного сигнала, затем разделяют выходной сигнал гироскопа на составляющие соответственно осям чувствительности гирокомпаса, при этом для перегрузочного варианта гирокомпаса заполняют радиального зазора подвеса жидкостью частично, обеспечивают при этом нулевую аксиальную плавучесть поплавка, и собственное вращение подвеса, а для низко динамичного варианта гирокомпаса заполняют радиальный зазор подвеса несмешивающимися жидкостями различной плотности и обеспечивают при этом положительную аксиальную плавучести поплавка, собственное вращение поплавковой камеры, причем жидкость большей плотности размещают в торцевых частях подвеса, регулируют положение поплавка путем перераспределения объемов жидкости различной плотности в торцевых частях подвеса и регулируют положение поплавка путем перераспределения объемов жидкости различной плотности в торцевых частях подвеса.
Устанавливают обмотки опорного напряжения соответственно осям чувствительности гироскопа так, что разворачивают сигнальную катушку с закрепленными, на ней обмотками опорного напряжения вокруг оси сигнальной катушки и осуществляют при этом привязку опорных обмоток к вертикальной и горизонтальной осям чувствительности гироскопа.
Компенсационный сигнал получают из сигнала гироскопа таким образом, что уравнивают по амплитуде опорное напряжение, соответствующее вертикальной оси чувствительности гироскопа и величину определенного напряжения дрейфа нулевого сигнала Ио.
Новизна и обоснование технического решения. Впервые предложено применение гидродинамического гироскопа, являющимся двух координатным гиротахометром /стр. 101 /1//, в качестве чувствительного элемента гироскопического компаса. Особенность решения - совмещение оси собственного вращения с направлением на географический север осуществляется с применением принципа, гирополукомпасирования /стр. 132 /3// посредством разворота оси собственного вращения гироскопа с угловой скоростью близкой вертикальной составляющей угловой скорости вращения Земли и принципа гирокомпасирования посредством уточнения совмещения оси собственного гироскопа и направления на север путем формирования приращения момента разворота оси собственного вращения в горизонтальной плоскости за счет появления неперпендикулярности второй оси чувствительности гироскопа и горизонтальной составляющей угловой скорости вращения Земли. Причинами неточности формирования момента, разворачивающего ось собственного вращения вокруг вертикали, могут быть как внешние, так и внутренние источники. Внутренние - это инструментальные погрешности гироскопа. В частности, в зависимости от изменения температуры окружающей среды и изменения при этом вязкости жидкости и нестабильность скорости собственного вращения подвеса будет изменять коэффициент передачи гидродинамического гироскопа. При этом разворот вокруг вертикальной оси будет реализован с погрешностью, обусловленной этими причинами. В результате появится погрешность совмещения оси собственного вращения и направления на север. А это, в свою очередь, станет причиной формирования ненулевой проекции горизонтальной составляющей угловой скорости вращений Земли на вторую ось /горизонтальную/ чувствительности гироскопа. При этом со второго выхода, соответствующего этой оси, гидродинамический гироскоп будет формировать сигнал, который подается на второй вход сумматора как приращение основного сигнала с первого выхода системы съема сигнала гироскопа /т.е. с датчика угла/. В результате будет сформирован дополнительный корректирующий момент, который и совместит ось собственного вращения и направление, на север. Это произойдет именно таким образом, т.к. приращение будет формироваться и убывать по мере совмещения оси собственного вращения и направления на север. При совпадении оси кинетического момента и направления на север проекция горизонтальной составляющей угловой скорости вращения Земли на вторую ось чувствительности гироскопа обратится в ноль и поэтому обнулится и приращение разворачивающего вокруг вертикальной оси момента. Канал коррекции также служит для автоматического совмещения оси собственного вращения и направления на север при подготовке гирокомпаса к работе. Т.к. при включении прибора ось собственного вращения случайным образом ориентирована относительно горизонтальной составляющей угловой скорости вращения Земли, поэтому следящая система коррекции выявит проекции горизонтальной составляющей угловой скорости вращения Земли на горизонтальную /вторую/ ось чувствительности гироскопа и развернет ось кинетического момента до совмещения ее с направлением на север, минимизируя при этом проекцию ωг на вторую ось чувствительности гироскопа.
При анализе уровня техники следует выделить "классические" решения гирокомпасирования на базе трехстепенного гироскопа /стр. 172 /3// гирокомпаса Аншютца /стр. 180 /3// и Сперри /стр. 183 /3//. Эти решения бесспорно значимы, но отличаются достаточной сложностью технической реализации и значительным временем совмещения оси кинетического момента и направления на север. Наиболее близким по технической. сущности к предложенному решению /для сравнения/ можно выделить способ гирокомпасирования на базе двухстепенных гироскопов /стр. 185 /3//. Предложенное решение отличается заменой комплекса чувствительных элементов /пары двухстепенных гироскопов и акселерометра/ единственным двухкоординатным гидродинамическим гиротахометром. По сигналам с него предложено осуществлять разворот оси его собственного вращения с угловой скоростью, близкой вертикальной составляющей угловой скорости вращения Земли, и уточнять совмещение оси собственного вращения ГДГ на географический север при появлении ее отклонения от этого направления из-за формирования неперпендикулярности второй горизонтальной оси чувствительности гироскопа и горизонтальной составляющей угловой скорости вращения Земли. В результате суммирования сигналов, пропорционального вертикальной составляющей угловой скорости вращения Земли, и корректирующего, пропорционального проекции горизонтальной составляющей угловой скорости вращения на горизонтальную ось чувствительности гироскопа, ось кинетического момента совмещается с направлением на север.
Необходимым условием реализации этих операций является наличие горизонтальной платформы, где размещается гироскоп со сферическим гидродинамическим подвесом сферического поплавка. Эту платформу предложено формировать посредством классического карданова подвеса. Двухкоординатную стабилизацию предложено осуществить в двух вариантах. Первый - горизонтирование с использованием "классического" жидкостного маятникового переключателя /стр. 51 /4//. Суть его состоит в том, что каждая пара контактов переключателя при отклонении платформы от плоскости горизонта замыкает соответствующие цепи контуров стабилизации на моментные двигатели относительно соответствующих осей. Второй вариант двухосной стабилизации предложен с использованием гидродинамического гироскопа с аксиальным смещением центра масс. Смещение центра масс поплавка позволяет осуществить начальную выставку оси собственного вращения вспомогательного гидродинамического гироскопа вертикально. Этот гироскоп связан жестко с внутренней вертикальной рамкой. При отклонении платформы с гидродинамическим гироскопом от плоскости горизонта относительно каждой из осей чувствительности с выхода соответствующего канала вспомогательного гироскопа формируются сигналы, пропорциональные текущему мгновенному ее отклонению, и подаются в соответствующие цепи двигателей стабилизации. Эти двигатели /датчики момента/ возвращают рамки в исходное положение.
Таким образом, в сравнении даже с гирокомпасом на двухстепенных поплавковых гироскопах предложенное решение отличается упрощением конструктивной схемы. Следует отметить, что кроме очевидного упрощения схемы можно ожидать снижения стоимости гирокомпаса за счет более низкой цены гидродинамического гироскопа по сравнению с двухстепенным гироскопом с подвесом чувствительного элемента гидростатического типа. При этом характеристики точности приборов отличаются незначительно. Кроме того, предложенное решение может быть применено на высокодинамичных основаниях, где поплавковые гироскопы не нашли применения из-за их разрушения в тех условиях, где гидродинамический гироскоп удовлетворительно выполняет функции измерителя угловых перемещений. Совокупность решений - применение двухосной стабилизации и двухкоординатного гирополукомпасирования и гирокомпасирования позволяет получить сверхсуммарный эффект - совмещение оси собственного вращения гироскопа с направлением на географический север, относительно которого отсчитывается курсовой угол /азимут/, и углы тангажа и крена относительно горизонтальной платформы, где установлен гидродинамический гироскоп. Таким образом, на базе этого решения может быть создан уникальный гидродинамический компас, имеющий преимущества перед "классическими" решениями задачи гирокомпасирования.
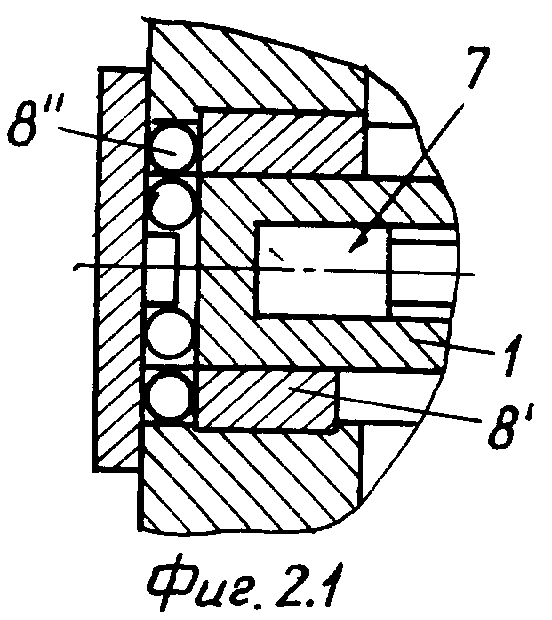
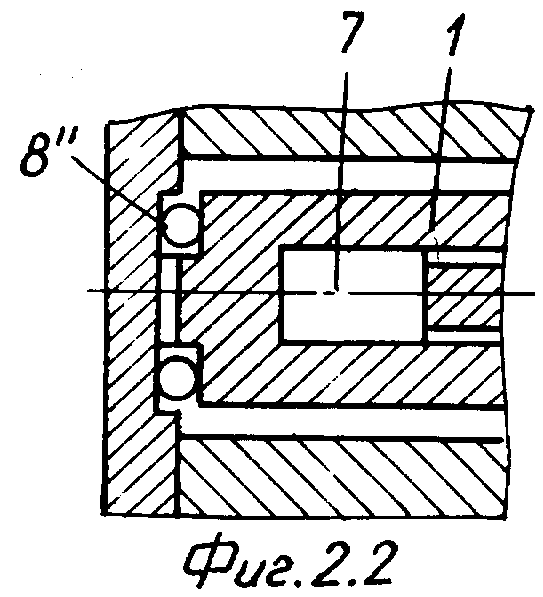
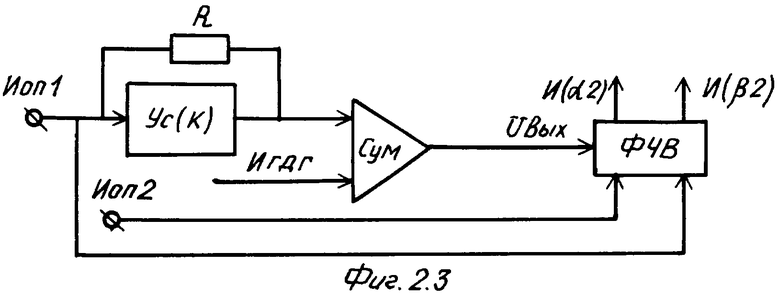
Для решения этой задачи необходимо обеспечить необходимый порог чувствительности гидродинамического гироскопа, позволяющий измерять угловую скорость вращения Земли. Снижение порога чувствительности гидродинамического гироскопа /ГДГ/ сводится к снижению общего уровня возмущающих моментов, обусловленных технологическими факторами изготовления поплавка /радиального смещения центра масс/ и точности собственного вращения поплавковой камеры/, исключающего осевое возвратно-поступательное движение поплавковой камеры на частоте собственного вращения /стр. 104 /1//, для минимизации радиального смещения центра масс предложено осуществлять дополнительно радиальную балансировку. Кроме того, предложено осуществлять собственное вращение в подшипниках, исключающих перекосы внутреннего и внешнего колец /см., например, фиг.2.1, 2.2/. Здесь представлены возможные варианты подшипников с роликовым радиальным вращением и осевым шариковым вращением для обеспечения осевой жесткости. С другой стороны, повысить чувствительность ГДГ можно за счет компенсации электрическим путем постоянной составляющей дрейфа его нулевого сигнала при помощи схемы, представленной на фиг.2.3. Для формирования компенсационного сигнала предварительно определяют не скомпенсированную выставкой системы съема сигнала остаточную постоянную составляющую дрейфа нулевого сигнала ГДГ. Для этого разворачивают его относительно оси собственного вращения и определяют составляющую Ио, которую нужно скомпенсировать. Угол отклонения поплавка относительно камеры, обусловленный радиальным смещением центра масс, случайным образом ориентирован в каждом из ГДГ /стр. 101 /1// относительно оси вращения подвеса. При горизонтальной оси собственного вращения ГДГ измеряет только составляющую скорости вращения Земли и дрейф нулевого сигнала /т.е. внутренний возмущающий момент/. При этом предполагается, что ось собственного вращения направлена на север. В рассматриваемом случае угол отклонения поплавка формируется в горизонтальной плоскости. При повороте ГДГ угол отклонения поплавка, обусловленный дрейфом нуля в некоторый момент времени, совпадает по направлению с углом отклонения, обусловленным скоростью вращения Земли. Углы суммируются, а на его выходе формируется Имах=1И/ωз+ωдр/. При последующем повороте наступает момент, когда углы вычитаются друг из друга. На выходе ГДГ будет сформирован Сигнал Имин=И/ωз-ωдр/. Вычитая Имин из Имах, определяется по формуле Ио=/Имах-Имин // 2. Именно эту величину используют при настройке схемы компенсации постоянной составляющей дрейфа нулевого сигнала ГДГ. Из опорного напряжения, соответствующего вертикальной оси, формируют компенсационный сигнал путем ослабления в К раз. Этот сигнал подают на вход сумматора для алгебраического суммирования его с выходным сигналом ГДГ, содержащим постоянную составляющую дрейфа нулевого сигнала Ио. При таком суммировании компенсационный сигнал существенно уменьшает постоянную дрейфа нуля ГДГ. В результате в выходном сигнале останется только сигнал, пропорциональный вертикальной составляющей скорости вращения Земли, который и используется для разворота платформы ГДГ со скоростью, практически равной, но противоположной по направленной вертикальной составляющей угловой скорости вращения Земли. При этом предварительно опорные катушки привязывают к соответственно к вертикальной и горизонтальной осям чувствительности гироскопа.
На фиг.1 представлена кинематическая и функциональная схема гидродинамического гирокомпаса.
На фиг.1 обозначены: ГДГ - гидродинамический гироскоп, ВР, ГР - вертикальная и горизонтальная рамки карданова подвеса, ωв, ωг - вертикальная и горизонтальная составляющие угловой скорости вращения Земли, Н - кинетический момент, определяющий направление на географический север, И/α2/ и И/β2/ - выходные сигналы ГДГ, пропорциональные горизонтальной и вертикальной составляющей скорости вращения Земли. УМ - усилитель мощности, 2 - двигатель разворота горизонтальной платформы с ГДГ вокруг вертикали, 3 - формирователь сигналов об отклонении горизонтальной платформы от плоскости горизонта /в первом варианте исполнения - жидкостной маятниковый переключатель, во втором - это ГДГ с аксиальным смещением центра масс и вертикальной осью собственного вращения/; 4,5 - двигатели стабилизации /один относительно оси Ур другой относительно оси Zp/, 6, 7 преобразующие устройства /усилители/. Сум - сумматор сигналов разворота платформы на север и сигналов коррекции этого разворота. И/ωв/, ΔИ/ωг/ - сигналы пропорциональные вертикальной ωв горизонтальной ωг составляющей угловой скорости вращения Земли.
На фиг.2.1, 2.2 представлены варианты подшипниковых узлов, имеющих пониженный уровень интенсивности аксиальной вибрации на частоте вращения поплавковой камеры, 7 - камера стабилизации плавучести в поплавковой камере 1 ГДГ. 8', 8 - ролики радиального и шарики осевого вращения. На фиг.2.3 представлена схема компенсации дрейфа нулевого сигнала гидродинамического гироскопа. Здесь: Иоп1, Иоп2 и Игдг - опорные и выходной сигнал гироскопа. Ус /К/ - усилитель преобразования /ослабления/ опорного напряжения в компенсационный сигнал, Сумм - сумматор сигнала Игдг и компенсационного сигнала Ио, ФЧВ - фазочувствительный выпрямитель /или усилитель/, разделяющий Ивых гироскопа на составляющие И/α2/ и И/β2/, R - регулировочный элемент коэффициента усиления.
Способ гидродинамического гирокомпасирования и компенсации дрейфа его нулевого сигнала реализуется следующим образом.
Перед гирокомпасированием осуществляют компенсацию /при необходимости/ дрейфа нулевого сигнала гидродинамического гироскопа, который затем будет установлен на горизонтальную площадку.
Способ гирокомпасирования, включающий ориентацию оси собственного вращения гироскопа на север и установку ее на горизонтальную платформу, размещенную на оси двигателя разворота вокруг вертикальной оси, имеет особенность такую, что
- в качестве гироскопа используют гидродинамический гироскоп, перед установкой на горизонтальную платформу осуществляют компенсацию дрейфа нулевого сигнала гироскопа,
- устанавливают гироскоп на вертикальную ось вертикальной внутренней рамки карданова подвеса,
- а на горизонтальную ось вертикальной внутренней рамки устанавливают первый двигатель стабилизации, внутреннюю рамку устанавливают в наружную горизонтальную рамку, на одну из горизонтальной оси которой устанавливают второй двигатель стабилизации,
- устанавливают на внутренней вертикальной рамке двухкоординатный формирователь сигналов об отклонении платформы от горизонтальной плоскости,
- формируют каналы горизонтальной стабилизации платформы, где установлен гидродинамический гироскоп,
- формируют каналы поворота оси собственного вращения гироскопа на север и коррекции разворота оси собственного вращения на север,
- при отклонении внутренней рамки от вертикали, а наружной рамки от плоскости горизонта замыкают соответствующие цепи формирователя сигналов об отклонении платформы от горизонтальной плоскости на двигатели стабилизации и формируют при этом моменты вокруг соответствующих осей и таким образом возвращают рамки в исходное положение,
- а вертикальную составляющую скорости вращения Земли компенсируют так, что формируют корректирующий момент вокруг вертикальной оси горизонтальной платформы, где установлен гироскоп, и разворачивают при этом ось собственного вращения с угловой скоростью, близкой вертикальной составляющей угловой скорости вращения Земли, так, чтобы она сохраняла установленное ранее направление на север,
- при отклонении оси собственного вращения от направления на север формируют приращение величины разворачивающего момента вокруг вертикальной оси и совмещают при этом ось собственного вращения с направлением на север,
- отсчитывают курсовой угол поворота основания относительно оси собственного вращения, а его угол тангажа и крена - относительно горизонтальной рамки карданова подвеса, где установлен гидродинамический гироскоп,
- при этом для перегрузочного варианта гирокомпаса частично заполняют камеру подвеса поплавка жидкостью, обеспечивают при этом нейтральную аксиальную плавучесть поплавка и собственное вращение подвеса,
- а для низкодинамичного варианта гирокомпаса заполняют радиальный зазор подвеса несмешивающимися жидкостями различной плотности, обеспечивая положительную аксиальную плавучесть поплавка и собственное вращение поплавковой камеры, причем жидкость большей плотности размещают в торцевых частях подвеса и регулируют положение поплавка путем перераспределения объемов жидкости различной плотности в торцевых частях подвеса.
Формирователь сигналов об отклонении платформы от плоскости горизонта реализуют так, что используют двухкоординатный жидкостной маятниковый переключатель или гидродинамический гироскоп с вертикально ориентированной осью собственного вращения и аксиальным смещением центра масс.
Формируют каналы горизонтальной стабилизации так, что соединяют одну пару контактов маятникового переключателя или выход системы съема сигнала гидродинамического гироскопа с аксиальным смещением центра масс относительно первой оси чувствительности с первым двигателем стабилизации, другую пару контактов или второй выход системы съема сигнала гидродинамического гироскопа относительно второй оси чувствительности соединяют со вторым двигателем стабилизации.
Формируют канал разворота оси собственного вращения на север так, что устанавливают одну из осей чувствительности гироскопа вертикально, соединяют датчик угла отклонения поплавка в горизонтальной плоскости через преобразующие устройства с первым входом сумматора, а его выход соединяют через усилитель мощности с датчиком разворота горизонтальной платформы вокруг вертикальной оси.
Формируют канал коррекции разворота оси собственного вращения гироскопа на север так, что устанавливают вторую ось чувствительности перпендикулярно меридиану, соединяют датчик угла отклонения поплавка в вертикальной плоскости с преобразующим устройством коррекции направления оси собственного вращения на север и вторым входом сумматора.
Вертикальную составляющую угловой скорости вращения Земли компенсируют корректирующим моментом так, что отклоняют поплавок в горизонтальной плоскости относительно камеры и формируют при этом сигнал с выхода датчика угла и подают его через преобразующее устройство на первый вход сумматора и далее через усилитель мощности на датчик разворота горизонтальной платформы вокруг вертикальной оси с установленным на ней гидродинамическим гироскопом.
Формируют приращение величины разворачивающего момента вокруг вертикальной оси так, что формируют отклонение поплавка в вертикальной плоскости за счет появившейся неперпендикулярности второй горизонтальной оси чувствительности гироскопа и горизонтальной составляющей угловой скорости вращения Земли, преобразуют этот угол отклонения в сигнал и подают его на второй вход сумматора и далее через усилитель мощности на двигатель разворота горизонтальной платформы вокруг вертикальной оси.
Способ компенсации дрейфа нулевого сигнала гидродинамического гирокомпаса, в котором устанавливают ось собственного вращения гироскопа горизонтально,
- разворачивают вокруг оси собственного вращении, имеет особенность такую, что при развороте его вокруг оси собственного вращения находят величину наибольшего Имах и наименьшего Имин выходного сигнала гироскопа,
- вычисляют величину дрейфа нулевого сигнала гироскопа по формуле /Имах-Имин/ /2=Ио,
- фиксируют гироскоп в положении, где зафиксирован наибольший выходной сигнал, и устанавливают обмотки опорного напряжения одну соответственно вертикальной оси, а другую - горизонтальной оси чувствительности гироскопа,
- осуществляют алгебраическое суммирование компенсационного сигнала, полученного из опорного напряжения гироскопа, и его выходного сигнала,
- затем разделяют выходной сигнал гироскопа на составляющие соответственно осям чувствительности гирокомпаса,
- при этом для перегрузочного варианта гирокомпаса заполняют радиальный зазор подвеса жидкостью частично, обеспечивают при этом нулевую аксиальную плавучесть поплавка и собственное вращение подвеса,
- а для низкодинамичного варианта гирокомпаса заполняют радиальный зазор подвеса несмешивающимися жидкостями различной плотности и обеспечивают при этом положительную аксиальную плавучести поплавка, собственное вращение поплавковой камеры,
- причем жидкость большей плотности размещают в торцевых частях подвеса,
- регулируют положение поплавка путем перераспределения объемов жидкости различной плотности в торцевых частях подвеса.
Устанавливают обмотки опорного напряжения соответственно осям чувствительности гироскопа так, что разворачивают сигнальную катушку с закрепленными на ней обмотками опорного напряжения вокруг оси сигнальной катушки и осуществляют при этом привязку опорных обмоток к вертикальной и горизонтальной осям чувствительности гироскопа.
Компенсационный сигнал получают из сигнала гироскопа таким образом, что уравнивают по амплитуде опорное напряжение, соответствующее вертикальной оси чувствительности гироскопа, и величину определенного напряжения дрейфа нулевого сигнала Ио.
Технический результат реализация гирокомпасирования как низкодинамичного, так и перегрузочного варианта гирокомпаса. Дополнительно компенсирован дрейф нулевого сигнала гидродинамического гироскопа, позволяющий сформировать достаточный порог чувствительности для измерения составляющих угловой скорости вращения Земли. Технический эффект - осуществление гирокомпасирования с использованием в качестве чувствительного элемента двухкоординатный гидродинамический гироскоп.
При создании решения использованы:
1. Андрейченко К.П. Динамика поплавковых гироскопов и акселерометров. М.: Машиностроение, 1987 /прототип, стр. 7, глава 6/.
2. А.С. 228978. Способ гидродинамического взвешивания чувствительного элемента гироскопа. G 01 C 19/00 /Смирнов Е.Л., Блинов И.А. и др./.
3. У.Ригли, У.Холлистер, У. Денхард. Теория, проектирование и испытания гироскопов. Перевод с англ. под ред. С.А.Харламова. М.: "Мир", 1972 /глава 10/.
4. Гироскопические системы. Проектирование гироскопических систем, ч.1, под ред. Д.С.Пельпора. М.: "Высшая школа", 1977 /стр. 51/.
Изобретение предназначено для реализации гирокомпаса для низко- и особенно высокодинамичных движущихся объектов. Осуществляют определение дрейфа нулевого сигнала гидродинамического гироскопа, формируют компенсационный сигнал дрейфа и удаляют его постоянную составляющую из сигнала гидродинамического гироскопа /ГДГ/. Осуществляют двухосную горизонтальную стабилизацию ГДГ. Совмещают одну из его осей чувствительности с вертикалью, а другую с направлением, перпендикулярным меридиану. Осуществляют разворот гироскопа вокруг вертикали и совмещают при этом ось кинетического момента и направление на север. При отклонении его от направления на север формируют приращение разворачивающего момента и уточняют таким образом совмещение оси собственного вращения и направления на север. Двухосную горизонтальную стабилизацию осуществляют при помощи жидкостного маятникового переключателя или гидродинамического гироскопа с вертикально ориентированной осью собственного вращения и аксиальным смещением центра масс. Отсчитывают курсовой угол относительно оси кинетического момента, а углы тангажа и крена относительно горизонтально стабилизированной платформы. Техническим результатом является увеличение порога чувствительности и упрощение конструкции. 2 с. и 8 з.п. ф-лы, 2 ил.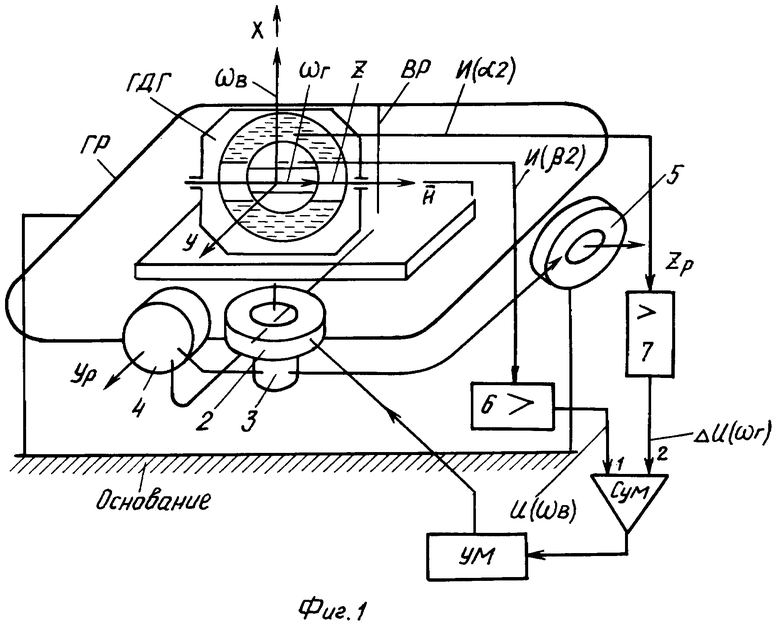
| РИГЛИ У | |||
| и др | |||
| Теория, проектирование и испытание гироскопов | |||
| - М.: Мир, 1972, с.180-185 | |||
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И КОМБИНИРОВАННОЙ КОМПЕНСАЦИИ ЕГО ДРЕЙФА | 2001 |
|
RU2189564C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ, УСТАНОВЛЕННОГО НА УПРАВЛЯЕМУЮ В АЗИМУТЕ И СТАБИЛИЗИРОВАННУЮ В ПЛОСКОСТИ МЕСТНОГО ГОРИЗОНТА ПЛАТФОРМУ | 2002 |
|
RU2210740C1 |
| АНДРЕЙЧЕНКО К.П | |||
| Динамика поплавковых гироскопов и акселерометров | |||
| - М.: Машиностроение, 1987, с.7, 87-104 | |||
| Чувствительный элемент поплавкового гирокомпаса | 1990 |
|
SU1810762A1 |
| Чувствительный элемент поплавкового гирокомпаса | 1974 |
|
SU498477A1 |
| US 3706137 A, 19.12.1972 | |||
| DE 3308358 A, 13.09.1984. | |||

