Предлагаемое техническое решение относится к области квантовой электроники и измерительной техники и может быть использовано при создании оптических локаторов, дальномеров и систем наведения лазерного излучения.
Известен способ оптической локации, включающий целеуказание пассивными средствами [1, 2], заключающийся в следующем:
- обнаруживают цель и определяют ее угловые координаты, осуществляя в пассивном режиме обзор пространства с помощью приемной системы;
- ось диаграммы направленности лазерного излучения совмещают с линией визирования по сигналам с приемной системы;
- облучают цель лазерным излучением и принимают отраженный сигнал.
Примером реализации такого способа оптической локации может служить работа лазерного дальномера, сопряженного с теплопеленгатором. Поиск цели проводят в широком угле (от 0° до 70°) с помощью ИК следящей головки, управляемой сервосистемой. После того как цель обнаружена, визирную ось следящей системы наводят на цель, а так как следящая головка жестко соединена с зеркалом, отклоняющим лазерный пучок, то тем самым наводят на цель и ось диаграммы направленности лазерного излучения. Далее производят облучение цели и принимают отраженный сигнал. Точность наведения лазерного излучения определяется при этом конструктивной жесткостью связи следящей головки с зеркалами.
Указанный способ [1] является наиболее близким по технической сущности к заявляемому.
Основным недостатком способа-прототипа является ограничение дальности действия локатора из-за ошибки наведения лазерного излучения на цель, возникающей вследствие рассогласования осей системы целеуказания и лазерной передающей системы за счет температурных и механических возмущений. Причиной появления механических возмущений могут быть вибрации носителя, вибрации при работе двигателей отклоняющих зеркал и других подвижных частей системы. Спектр механических возмущений лежит в области частот вплоть до обратного времени прохождения звука в конструкции, т.е. вплоть до нескольких килогерц.
Температурные градиенты вызывают в основном низкочастотные возмущения. Они могут быть связаны с охлаждением приемной системы (теплопеленгаторы), неравномерным нагревом солнечным излучением, тепловыделением при работе различных узлов системы.
Кроме того, необходимо учитывать девиацию оси лазерного излучателя, связанную с тепловыделением в активной среде, появлением в ней клиновой аберрации и разъюстировкой резонатора. Можно показать, что величина отклонения оси диаграммы направленности от нормали к выходному зеркалу при наличии клина в активной среде (например, за счет неравномерного нагрева излучением лампы накачки) может значительно превосходить величину вызвавшей его аберрации.
В способе-прототипе перечисленные выше причины ведут к уменьшению энергии, сообщенной на цель, и, следовательно, к уменьшению дальности действия локатора по отношению к достижимой дальности при точном наведении.
Целью предлагаемого изобретения является устранение указанных недостатков и повышение точности наведения и дальности действия локатора.
Поставленная цель достигается тем, что формируют сферическую задающую волну, совмещая положение центра ее кривизны с точкой изображения цели по сигналу с приемной системы целеуказания, и, усиливая задающую волну по мощности, обращают ее волновой фронт четное число раз.
При наведении на движущуюся цель центр кривизны задающей волны лазерного излучения совмещают с точкой упрежденного положения изображения цели, экстраполируя траекторию изображения цели в координатной плоскости приемной системы.
Формирование сферической задающей волны лазерного излучения с центром кривизны, совмещенным с точкой изображения цели по сигналу с приемной системы, позволяет получать точное наведение излучения лазера на цель в условиях наличия механических возмущений и температурных градиентов за счет того, что:
- излучение от цели, принимаемое пассивной системой, проходит оптическую систему и попадает на координатный приемник, фиксируя мгновенное состояние оптической системы;
- формируя задающую волну в координатной плоскости приемной системы и совмещая центр ее кривизны с выбранной точкой изображения цели, мы автоматически учитываем возмущения, т.к. после прохождения оптической системы излучение направлено на цель в силу принципа обратимости лучей в оптике (при условии, что за время прохождения света от цели до локатора и обратно цель можно считать неподвижной).
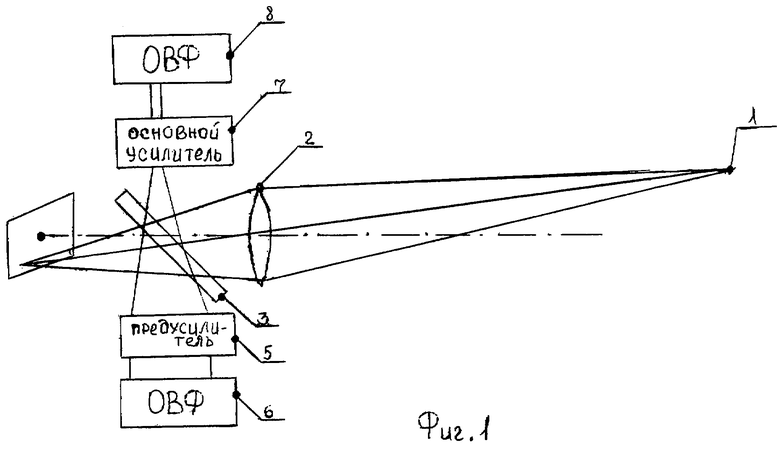
Задающую волну усиливают в вынесенных из информационного канала усилителях для повышения дальности действия локатора. Алгоритм локации пояснен на фиг.1:
- излучение от цели (1) принимают с помощью объектива приемной системы (2) через светоделитель (3);
- в координатной плоскости приемной системы (4) получают изображение цели и формируют задающую волну;
- задающую волну Езад направляют в тракт предварительного усиления (5) с помощью светоделителя (3), где осуществляют ей обращение волнового фронта (6), получая на выходе тракта волну Езад*;
- волну Езад* направляют в основной усилитель (7), где повторно осуществляют ей обращение волнового фронта (8), получая на выходе усиленную волну (Езад*)*=Езад, т.е. с волновым фронтом, совпадающим с волновым фронтом задающей волны независимо от аберраций усилительного тракта;
- усиленную волну (Езад*)*=Езад направляют на цель после отражения от светоделителя (3).
Для уменьшения потерь излучения в системе изменения направления излучения на светоделителе (3) целесообразно выполнять на основе изменения состояния поляризации излучения, для чего элемент (3) изготавливают в виде поляризатора, а в трактах предусиления и основного усиления производят поворот плоскости поляризации излучения с обращенным волновым фронтом.
В случае, когда отношение перпендикулярной к линии визирования составляющей скорости цели V⊥ в системе координат, связанной с локатором, к скорости света с является величиной одного порядка или превосходит расходимость лазерного излучения  (цель нельзя считать неподвижной за время пролета света от локатора до цели), центр кривизны задающей волны совмещают с точкой упрежденного изображения цели. Основное отличие предлагаемой операции введения упреждения от известной, где упреждение вводится путем отклонения параллельного пучка, сформированного в лазерной системе, состоит в том, что операция упреждения выполняется путем линейного смещения центра кривизны задающей волны относительно регистрируемого изображения цели, где экстраполяция траектории цели выполняется наиболее точно.
(цель нельзя считать неподвижной за время пролета света от локатора до цели), центр кривизны задающей волны совмещают с точкой упрежденного изображения цели. Основное отличие предлагаемой операции введения упреждения от известной, где упреждение вводится путем отклонения параллельного пучка, сформированного в лазерной системе, состоит в том, что операция упреждения выполняется путем линейного смещения центра кривизны задающей волны относительно регистрируемого изображения цели, где экстраполяция траектории цели выполняется наиболее точно.
Увеличение точности наведения ведет к увеличению доли энергии, доставленной на цель, и тем самым к увеличению дальности действия локатора.
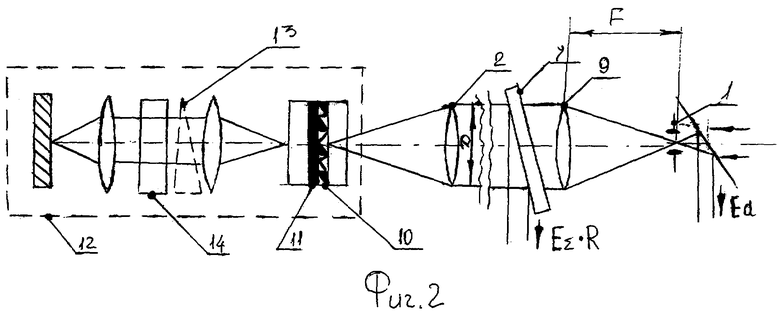
Проводился эксперимент по реализации описываемого способа. Схема эксперимента приведена на фиг.2.
Расположенная в дальней зоне цель имитировалась с помощью диафрагмы (1), расположенной в фокальной плоскости ахроматического объектива (9). В фокальной плоскости приемопередающего зеркального объектива (2) располагался пространственно-временной модулятор света (ПВМС) на основе структуры фотополупроводник (10) - жидкий кристалл (11) (ФП-ЖК). Изображение цели, подсвеченной с помощью проекционного фонаря, строилось в плоскости ПВМС (4). Под действием принятого излучения изменялось сопротивление фотопроводника и изменялись оптические свойства жидкого кристалла (двулучепреломление). Изображение цели регистрировалось в координатной плоскости приемной системы. Чувствительность ПВМС составляла 10-10 Дж на элемент разрешения. ПВМС являлся также управляемым зеркалом сопряженного резонатора (12) [3]. В той области, где располагалось изображение цели, коэффициент отражения увеличивался и происходила лазерная генерация.
Отметим, что в интегральной структуре ПВМС типа "сендвич" [4], где фоточувствительный (10) и модулирующий (11) слои находятся непосредственно в плоскости изображения цели, операция совмещения центра кривизны задающей волны с изображением цели выполняется автоматически и с высокой точностью, ограниченной лишь поперечным дрейфом свободных носителей в фотополупроводнике, который в реальных модуляторах составляет величину порядка толщины слоя, т.е. единицы микрометров. Т.к. диаметр дифракционно органиченного изображения цели составлял сотни микрон, то, как показали измерения, данные эффекты не влияли на точность наведения.
Эксперимент заключался в том, что измерялась доля энергии, доставленная на цель от всей излученной энергии при наличии возмущений в оптической системе.
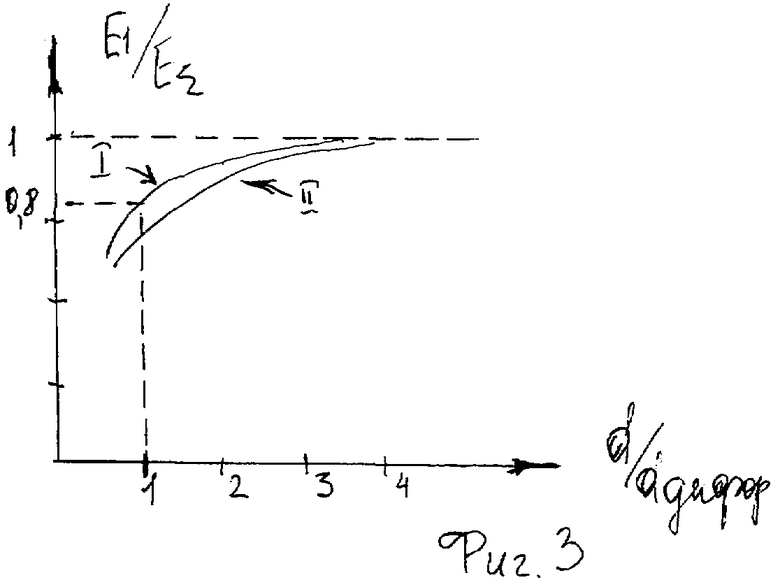
На фиг.3 приведена зависимость отношения энергии, прошедшей в диафрагму (1), Еd к излученной энергии Е∑ от диаметра диафрагмы, т.е. от угловых размеров цели. Из графика I видно, что даже при размере диафрагмы, близком к дифракционному пределу для оптической системы излучателя, на цель доставлялась максимально возможная доля энергии, соответствующая точному совпадению энергетического центра распределения энергии в плоскости диафрагмы с ее центром. Механические и температурные возмущения оптической системы моделировались путем заклона и смещения управляемого зеркала и объектива (2). При этом доля энергии, прошедшая в диафрагму, уменьшалась незначительно (˜10%) при смещении объектива вплоть до 12 мм и заклоне ПВМС вплоть до 30'. Все аберрации 1-го порядка компенсировались. Пределы, в которых допускалось перемещение объектива в поперечном направлении, определялись размерами рабочей зоны ПВМС.
Моделировались также аберрации, связанные с тепловыделением в активной среде. Было показано, что наличие клина (13) в активном элементе (14) с углом преломления до 30' не приводило к существенному изменению Еd/Е∑ (кривая II на фиг.3).
Таким образом в результате проведенного эксперимента была показана возможность формирования задающей волны, сопряженной волне, пришедшей от цели независимо от возмущений оптической системы.
Энергия задающей волны была ограничена лучевой прочностью ПВМС и составляла Е∑=300 мкДж. Усиление на два порядка задающей волны по мощности с обращением волнового фронта четное число раз не приводило к уменьшению точности наведения и поэтому дальность действия локатора существенно возрастала.
Второй пример реализации способа. В рассматриваемой выше реализации способа введение упреждения для быстродвижущихся целей оказывается весьма затруднительным в силу того, что приемная и передающая части системы целеуказания - лазерного излучателя связаны в интегральной структуре на прямую. На фиг.4 приведена реализация предлагаемого способа, где допускается электронная обработка сигналов системы целеуказания и введение упреждения.
Алгоритм работы локатора заключается в следующем. С помощью линейки тепловых приемников (4) осуществляют обзор пространства в широком угле (до 6°). Линейка приемников закреплена на жесткой детали таким образом, что излучение в тепловом диапазоне (2-10 мкм) проходит светоделитель (3), а излучение на длине волны λ=1,06 мкм светоделитель отражает. На этой же детали установлен пространственный модулятор света (4') в виде линейки электродов, управляемых сигналом с ЭВМ (15), обрабатывающей информацию с приемной системы.
ПВМС установлен таким образом, что каждому элементу приемной линейки однозначно соответствует электрод на модуляторе. При обнаружении цели сигнал с тепловых приемников обрабатывают на ЭВМ, определяют наиболее вероятное положение изображения цели в координатной плоскости (в плоскости приемников) и, следовательно, в плоскости ПВМС. Вычисленный сигнал о положении изображения цели подают на соответствующий электрод ПВМС. Поскольку ПВМС одновременно является управляемым зеркалом сопряженного резонатора (12), то в результате генерации формируют расходящуюся волну с открытой площадки (электрода ПВМС), совпадающую с изображением цели на длине волны генерации. Отметим, что в случае когда известна перпендикулярная к линии визирования составляющая скорости цели, то с помощью ЭВМ проводят экстраполяцию траектории изображения цели и сигнал подают на электрод, соответствующий упрежденному положению изображения цели.
Излучение задающей волны проходит приемопередающую оптическую систему и попадает на светоделитель (3') в поляризации, которая отражается эффективно. Излучение направляют в тракт предусилителя (5), где ему обращают волновой фронт (6) и на обратном проходе изменяют поляризацию на 90°. Выходящее из тракта предусилителя излучение через светоделитель (3') направляют в основной усилитель (7), где повторно обращают волновой фронт (8) и поворачивают поляризацию. Отраженное от поляризационного светоделителя усиленное излучение направляют на цель. Рассеянное целью излучение принимают с помощью той же оптической системы, причем приемник (лавинный фотодиод) (16) установлен также в фокальной плоскости объектива, а так как область, куда приходит отраженное излучение, аппаратно известна (изображение цели), то диаграмма направленности приемника может быть сужена путем пространственной селекции принятого сигнала перед приемником.
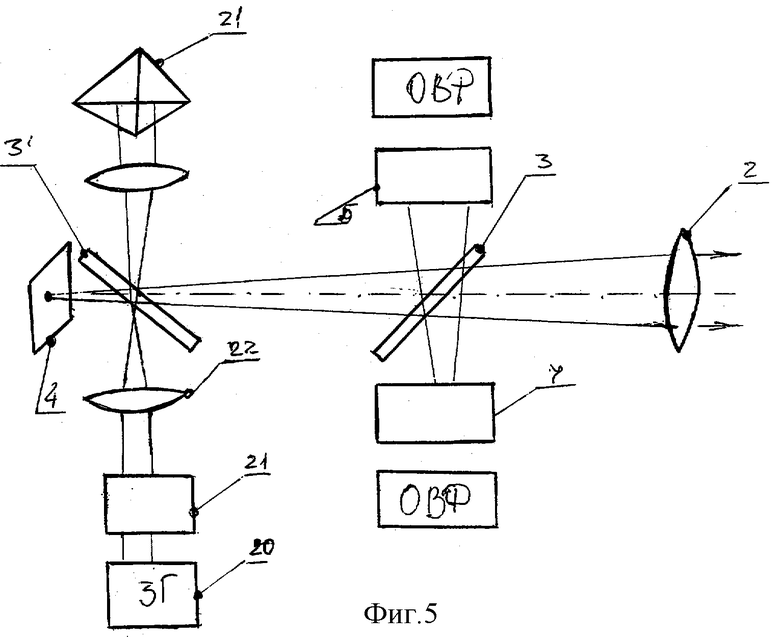
Другой пример реализации заявляемого способа основан на развитой к настоящему времени элементной базе электрооптических, акустооптических дефлекторов и матричных приемников. Алгоритм работы пояснен на фиг.5 и заключается в следующем. Излучение от цели фокусируют объективом приемной системы целеуказания (2) в плоскость координатного приемника (4) через светоделители (3) и (3'), пропускающие свет на длине волны наблюдения. Излучение задающего генератора (20), работающего с частотой следования импульсов более высокой, чем в усилительных каскадах, направляют через дефлектор (21) на объектив (22). Фокусное расстояние объектива выбирают так, что малая часть излучения ЗГ (10-3-10-4) фокусируется в плоскость матричного приемника. С помощью этого же приемника, диапазон спектральной чувствительности которого включает как длину волны наблюдения, так и длину волны генерации, регистрируют излучение от цели. С помощью дефлектора (21) и гидирующих зеркал приемопередающей системы совмещают отметку задающего генератора и цели. С помощью триппель-призмы обращают волновой фронт задающей волны. Отраженное от светоделителя (3') излучение направляют в предусилитель и усилитель мощности, на которые подают импульс накачки в момент совпадения двух отметок на приемнике.
Использование предлагаемого способа оптической локации обеспечивает по сравнению с существующими способами следующие преимущества:
- повышение точности наведения лазерного излучения и дальности действия локатора без повышения его массы и габаритов,
- надежную работу локатора в условиях температурных и механических возмущений, характерных для боевого применения локатора.
Источники информации
1. М.С.Малашин, Р.П.Калинский, Ю.Б.Борисов "Основы проектирования лазерных локационных систем". М.: Высшая школа, 1983, с.162-166.
2. В.И.Петковский, О.А.Пожидаев "Локаторы на лазерах", М.: Воениздат, 1969.
3. R.V.Pole, JOSA, 55, 254, (1965).
4. Ф.Л.Владимиров, М.А.Грознов, А.Ф.Корнев и др. Труды ГОИ, 60, вып.194, стр.71 (1986).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124740C1 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ ЛАЗЕРНЫХ СИСТЕМ ПОИСКА ПОГРУЖЕННЫХ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388013C2 |
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2022 |
|
RU2791833C1 |
| СПОСОБ ДОСТАВКИ НА ТОЧЕЧНУЮ ЦЕЛЬ ИЗЛУЧЕНИЯ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2019 |
|
RU2724240C1 |
| УСТРОЙСТВО ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1990 |
|
RU2033629C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
Изобретение относится к области квантовой электроники и измерительной техники и может быть использовано при создании оптических локаторов, дальномеров и систем наведения лазерного излучения. Сущность: способ включает формирование изображения цели, регистрацию изображения цели, усиление, обращение волнового фронта и формирование мощного сигнала на цель. При этом изображение цели регистрируют в виде изменения локальных параметров среды. Затем в плоскости изображения цели для формирования задающей волны совмещают центр кривизны сферической задающей волны с точкой изображения цели путем лазерной генерации. После этого и перед формированием мощного сигнала на цель проводят обращение волнового фронта задающей волны четное число раз при ее одновременном усилении. Технический результат: повышение дальности при одновременном повышении скрытности. 5 ил.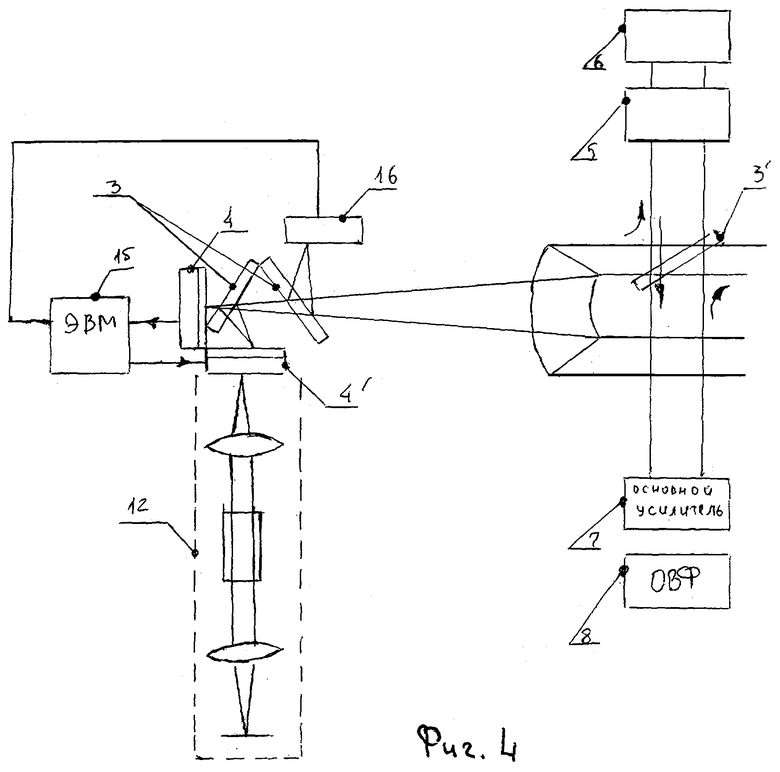
Способ доставки на цель мощного лазерного излучения, включающий формирование изображения цели, регистрацию изображения цели, усиление, обращение волнового фронта и формирование мощного сигнала на цель, отличающийся тем, что, с целью повышения дальности при одновременном повышении скрытности, изображение цели регистрируют в виде изменения локальных параметров среды, затем в плоскости изображения цели для формирования задающей волны совмещают центр кривизны сферической задающей волны с точкой изображения цели путем лазерной генерации, после чего и перед формированием мощного сигнала на цель проводят обращение волнового фронта задающей волны четное число раз при ее одновременном усилении.
| Б.Я.Зельцович, Н.Ф.Пилипецкий, В.В.Шкунов | |||
| Обращение волнового фронта, М.: Наука, 1985, с.21. |

