Изобретение относится к технике вооружения подводного флота и может быть использовано для защиты подводных объектов (ПО) от лазерных средств поиска ПО воздушного базирования, а также для подавления лазерных систем связи с подводными объектами противника, выведение из строя лазерных глубиномеров, морских лидаров и т.п.
Известен способ поиска подводных лодок в подводном положении самолетными лазерными локационными системами (Патраков Ю.М., Закомолдин И.М., Завьялов А.К. Оптиколокационная заметность кораблей и проблемы их защиты от обнаружения лазерными локационными системами. // Морская радиоэлектроника, 2005, №4. - С.46-50).
Известен способ поражения объектов с использованием лазерного излучения, который реализован в разработках лазерного оружия YAL-1A ABL (США, головной разработчик фирма Боинг), многоцелевой оптической системы подавления, разработанной концерном EADC (Германия), лазерной системы наземного и морского базирования ARMS (США) и др. (см., например, в сборнике «Новые информационные технологии» от 12 августа 2006 г., статью «Новое лазерное оружие» it new. com.ua/24548.html., статью П.С.Макарова «Лазерное оружие» в сборнике «Изобретатели» inventors.ru/index.asp mode=1934; статью Соколова «Перспективы лазерного оружия» http://pentagonus.narod.ru/army/stat/w2.htu).
В известном способе пеленгуют цель и наводят на нее лазер большой мощности, сопровождают цель по угловым координатам и облучают ее поражающим лазерным излучением.
Известный способ не может быть использован, когда непосредственное определение направления на цель невозможно, например, при наличии между пеленгатором и целью взволнованной морской воды, которая приводит, в частности, к случайным рефракциям излучения цели и боевого лазера.
Известен способ самонаведения силового излучения на мишень по средствам обращения волнового фронта (см. В.Я.Зельдович, В.В.Шкуров / Обращение волнового/http://rusnauka.ru/lib/physic/wavfrount/l/obrwavr.htm; В.Я.Зельдович, Н.Ф.Пителецкий, В.В.Шкуров / Обращение волнового фронта. /стр.22/ М.: «Наука», 1985 г.), содержащий наведение вспомогательного импульсного лазера на мишень, перехват отраженного мишенью излучения апертурой силового лазера, обращение волнового фронта и усиление перехваченного излучения.
В известном способе обращенная волна на обратном проходе усилителя снимает запасенную энергию и точно доставляется на мишень с теоретически полной компенсацией искажений, связанных с неоднородностями трассы «мишень - обращающая система», а также с несовершенствами изготовления и юстировки всех элементов оптического тракта.
Однако известный способ не эффективен для поражения надводных целей с борта погруженного ПО, т.к. для его реализации необходимо определение координат мишени через взволнованную поверхность моря и использование вспомогательного лазера с неприемлемо большой мощностью, при этом излучение этого лазера может быть перехвачено вследствие случайных преломлений при прохождении взволнованной поверхности моря в неприемлемо широком угловом поле (зона перехвата с вероятностью более 80% представляет собой конус с углом между осью и образующей около 10°).
Таким образом, известный способ не пригоден для функционального подавления лазерных локаторов обнаружения подводных объектов из-за невозможности скрытного точного подведения из-под воды вспомогательного излучения на подводный объект.
Теоретически возможна модернизация известного способа без использования вспомогательной подставки. В этом случае «подавляемый локатор - лазерный усилитель и обращающая система» должны функционировать как самовозбуждающаяся система. Однако необходимым условием для самовозбуждения этой системы является высокоточное наведение лазера подводного объекта на подводный локатор и прецизионное автосопровождение по угловым координатам этого локатора. При известной последовательности действий необходимое условие самовозбуждения не выполнимо.
Наиболее близким по технической сущности является способ поражения целей лазерными средствами морского базирования, который использован в разработках ВМС США применительно к системам HELL -HELLATE (High Energy Laser Low Aspect Target Tracking Experiment), FEL (Free Electron Laser) и др. (см., например, Jane's Defence Week 2004, v 41, №35, p.12; Развитие морского оружия, состояния и перспективы, факты, дискуссии, http://forums.arbase/ru/2007/08/09/topk - 55514.3 - Rasvitie - morskogo - oruzhiya/. Sostoyanie - i - perspektivy. Fakty - diskussii. html).
В известном способе на основе пеленгации цели облучают ее импульсным лазерным излучением в течение времени, достаточного для поражения последней.
Известный способ может использоваться только при надводном положении ПО, т.к. ни пеленгация цели, ни наведение по результатам этой пеленгации лазерного луча не возможны через взволнованную поверхность из-за случайных преломлений света при прохождении поверхности раздела «вода-воздух». Таким образом, основной недостаток известного способа - низкая скрытность действий.
Целью изобретения является повышение скрытности действий подводного объекта.
Поставленная цель достигается тем, что в известном способе, содержащем автосопровождение поражаемой надводной лазерной системы и облучение этой системы мощным лазерным излучением на длине волны, близкой к длине волны подавляемой системы, дополнительно введены:
- обнаружение бликов подводного лазерного поля, создаваемого надводным лазерным источником подавляемой системы при случайных фокусировках излучения этого источника взволнованной водной поверхностью,
- определение направлений на наиболее яркие из обнаруженных бликов,
- излучение в этих направлениях силового лазерного излучения.
На фигуре 1 представлена структурная схема системы функционального поражения надводных лазерных средств с борта погруженного подводного объекта, где:
1 - оптическая приемо-передающая система,
2 - фотоэлектронный матричный приемник (пеленгатор),
3 - селектор наиболее яркого блика (многоканальный пиковый детектор),
4 - формирователь команд оперативного наведения,
5 - оптическая система двухкоординатного оперативного отклонения луча (дефлектор),
6 - силовой лазер,
S - излучение (квазипараллельный пучок) подавляемой системы,
SC - силовое (поражающее) излучение,
МП - морская поверхность,
Бл - блик излучения S.
На фигуре 2 представлен пример конструктивного выполнения широкоугольной системы оптикоэлектронных матричных приемников (т.е. структурных элементов, которые обозначены на фигуре 1 цифрами «1» и «2»), которая состоит из 22-х объективов с интерференционными фильтрами, 22-х матричных фотоприемников (ПЗС - приемников).
Работает система, реализующая предлагаемый способ, следующим образом.
Излучение S надводного лазерного локатора при распространении в воде подвергается двум конкурирующим эффектам, связанным со случайными фокусировками на крупных неоднородностях и рассеянием на мелких. В результате лазерный импульс при распространении через ансамбль случайно распределенных рассеивателей раскладывается на когерентную и некогерентную составляющие.
Когерентная интенсивность сохраняет форму импульса, а некогерентная расплывается во времени вследствие суперпозиций излучений (рассеяний) от различных областей пространства с различным временным запаздыванием.
Практический интерес для систем поиска подводных лодок представляют зоны (случаи) «слабых флюктуаций», в которых слабо рассеянная (когерентная) составляющая зондирующего импульса достаточно выражена.
Именно в этих случаях возможно обеспечить необходимый энергетический потенциал и требуемые точностные характеристики для обнаружения подводных объектов по отражениям лазерных импульсов от этих объектов или от создаваемых ими оптических неоднородностей в океане.
Для обнаружения подводной лазерной системы противника и скрытного наведения на нее лазерного оружия подводного объекта предлагается использовать бликовые структуры подводного светового поля, которые образуются при случайных фокусировках падающего на воду излучения S.
Гребни и впадины морских волн действуют на это излучение подобно системе оптических линз со случайно меняющимися характеристиками.
Эти «линзы» создают флюктуирующие изображения (действительные - подводные и мнимые - надводные) источника излучения (т.е. передающей оптической антенны подавляемого локатора).
Каждое такое изображение (блик) содержит информацию о местонахождении надводного передатчика. Излучение этих бликов, проходя через оптическую (зеркально-линзовую) систему 1, поступает в координатно-чувствительный (матричный) фотоприемник 2, где по номеру засвеченных элементов фотоприемной матрицы определяются угловые положения бликов относительно приборных координат системы лазерного оружия.
В блоке 3 выявляется наиболее яркий из зарегистрированных бликов. Координаты (αi, βi) отселектированного (в данном случае по критерию наибольшей яркости) i-го блика сравниваются в блоке с ориентацией (α, β) оптической оси дефлектора 5.
По результатам этого сравнения в блоке 4 формируются команды, однозначно отражающие невязки Δαi=αi-α и Δβi=βi-β. Эти команды поступают в дефлектор 5 для отработки невязок.
При Δαi=Δβi≈0 в блоке 4 формируется импульс запуска лазера 6. Оптическая ось лазера совмещена с оптической осью приемной оптики системы 1. Таким образом, излучение силового лазера 6 направляется в место, где был зарегистрирован отселектированный (например, наиболее яркий) блик.
Требование к быстродействию наведения на место регистрации блика (т.е. к быстродействию выполнения операций регистрации, селекции бликов, отработки команд наведения и запуска лазера) не должно превышать времени Т - «замороженности» взволнованной поверхности и практической «неподвижности» подавляемого лазерного локатора. Это время Т может соответствовать интервалу (от 1 до 10) мс.
В соответствии с принципом обратимости в оптике, лазерный импульс излучателя 6 направляется по тому же оптическому пути, что и импульс от наиболее яркого блика. При этом силовой импульс лазерного оружия подводного объекта пройдет через поверхность моря, которая практически не изменилась с момента прохождения через нее зондирующего лазерного импульса подавляемой системы. С учетом практической неподвижности подводного локатора в течение времени 
достигается обращение направления зондирующего луча (здесь: R - надводная дальность до подавляемой цели, h - глубина погружения ПО, α* и β* - направление на блик относительно топоцентрических координат ПО).
Значительная часть излучения подводного передатчика поступает на фотоприемник надводного локатора. Интенсивность этого излучения близка к величине Sn.
 ,
,
где: Soc - интенсивность излученного сигнала,
kB(h)·kатм(R) - интегральное ослабление излучения соответственно в воде и в атмосфере,
Аэфф - эффективная площадь приемной антенны подавляемого локатора,
Ω - надводная расходимость подавляющего излучения.
 ,
,
здесь: F - фокусное расстояние водяной «линзы» (F=5÷50 м),
d - диаметр лазерного пучка (d=10-2 м).
Даже если мощность лазера 6 несущественно отличается от мощности лазерного передатчика подавляемой локационной системы, на вход фотоприемника этой системы будет доставлен лазерный импульс в 1012÷1013 раз большей интенсивности по сравнению с отраженными сигналами.
В результате воздействия серии из N таких поражающих импульсов (N∈[1÷10000]) фотоприемник атакуемой системы будет разрушен или, по крайней мере, временно ослеплен (функционально поражен).
Во избежание атаки собственных систем лазерной связи с погруженными ПО система функционального подавления может быть дополнена декодером «свой-чужой» 7. В этом случае атака осуществляется после приема и обработки n импульсов надводного передатчика, т.е. решения задачи «свой-чужой».
Системы 1 и 2 должны удовлетворять противоречивым требованиям оптической селекции узкого диапазона волн в широком угловом поле при достаточной эффективной площади входного зрачка приемной оптической антенны.
Разрешение этого противоречия возможно, например, за счет увеличения числа приемных каналов. На фигуре 2 представлен вариант выполнения широкоугольной подводной фотоприемной системы, которая состоит из 22-х приемных объективов, каждый из которых оснащен интерференционным оптическим фильтром во входном зрачке и матричным фотоприемником в плоскости изображения (т.е. системы 1 и 2 выполнены 22-канальными). Каждый фотоприемный канал принимает сигнал в относительно узком (единицы градусов) угловом поле. При этом совокупное угловое поле составляет десятки градусов. Все фотоприемники функционируют как единая система. Силовое излучение отклоняется соответствующим образом относительно оптической оси (осей) приемного канала, в котором отселектированы наиболее долго живущие (самые яркие) блики.
Технико-экономическое преимущество предлагаемого технического решения состоит в том, что для поражения лазерных средств противника узкопольным (скрытным) излучением из-под воды не требуется пеленговать носитель лазерного средства. Достаточно только фиксировать подводные блики, создаваемые передатчиком противника. При этом противник для ликвидации условий наведения на него силового излучения должен изыскать способы устранения волнения на море и/или отмены принципа обратимости путей распространения квантов света, т.е. никаких реальных возможностей защиты от предлагаемого способа функционального подавления не существует.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| Способ дистанционного поражения оптико-электронных приборов противника | 2022 |
|
RU2786890C1 |
| ИМИТАТОР МОРСКОЙ ПОВЕРХНОСТИ ДЛЯ СТАТИСТИЧЕСКОГО ИССЛЕДОВАНИЯ РАСПРЕДЕЛЕНИЯ МОРСКИХ БЛИКОВ ПРИ РАБОТЕ ЛАЗЕРНЫХ ДОПЛЕРОВСКИХ ЛОКАТОРОВ ПО НИЗКОЛЕТЯЩИМ РАКЕТАМ | 2012 |
|
RU2488138C1 |
| Приемо-передающее оптическое устройство | 2018 |
|
RU2696626C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ТОРПЕДОЙ | 2019 |
|
RU2736660C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЛЕТЯЩИХ КРЫЛАТЫХ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2009 |
|
RU2422852C1 |
| ИМИТАТОР БЛИКОВЫХ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ МОРСКОЙ ПОВЕРХНОСТЬЮ | 2011 |
|
RU2451302C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ЦЕЛЕЙ | 2015 |
|
RU2588604C1 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ И СУДНА ОТ ПОРАЖЕНИЯ ТОРПЕДОЙ | 2019 |
|
RU2733732C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ | 2017 |
|
RU2692332C2 |

Изобретение относится к лазерной технике и может быть использовано для защиты подводных объектов от активных лазерных систем поиска. Согласно способу функционального подавления лазерных систем поиска погруженных подводных объектов, осуществляют автосопровождение поражаемой надводной лазерной системы и облучение этой системы мощным лазерным излучением на длине волны, близкой к длине волны подавляемой системы. При этом с целью повышения скрытности действий подводного объекта дополнительно обнаруживают блики подводного лазерного поля, создаваемого надводным лазерным источником подавляемой системы при случайных фокусировках излучения этого источника взволнованной поверхностью моря, определяют направления на наиболее яркие из обнаруженных бликов и излучают в этих направлениях силовое лазерное излучение. Технический результат - повышение скрытности действий подводного объекта. 2 н.п. ф-лы, 2 ил.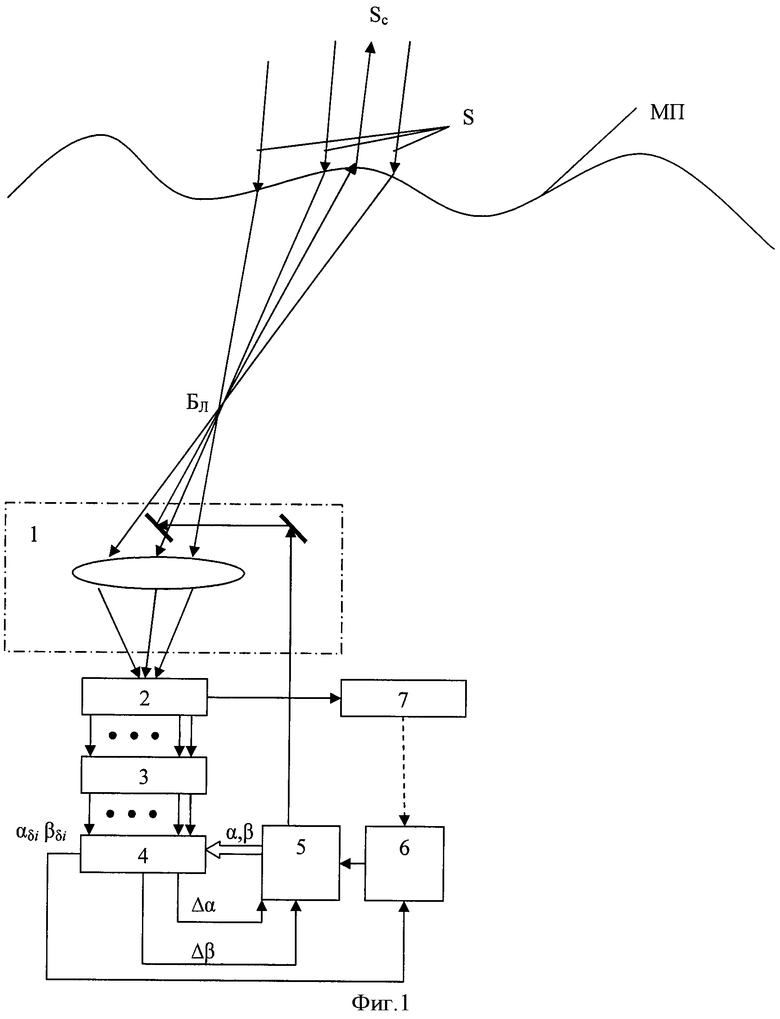
1. Способ функционального подавления лазерных систем поиска погруженных подводных объектов, содержащий автосопровождение поражаемой надводной лазерной системы и облучение этой системы мощным лазерным излучением на длине волны, близкой к длине волны подавляемой системы, отличающийся тем, что, с целью повышения скрытности действий подводного объекта, дополнительно введены:
обнаружение бликов подводного лазерного поля, создаваемого надводным лазерным источником подавляемой системы при случайных фокусировках излучения этого источника взволнованной поверхностью моря,
определение направлений на наиболее яркие из обнаруженных бликов,
излучение в этих направлениях силового лазерного излучения.
2. Устройство для осуществления способа по п.1, содержащее оптическую приемопередаюшую систему 1, размещаемую на корпусе подводного объекта и принимающую излучение S надводного лазерного локатора, которое поступает на фотоэлектронный матричный приемник 2, состоящий из 22 объективов с интерференционными фильтрами и 22 матричных фотоприемников (ПЗС-приемников), где по номеру засвеченных элементов фотоприемной матрицы определяются угловые положения бликов относительно приборных координат системы лазерного подавления, селектор 3 (многоканальный пиковый детектор) выявляет наиболее яркий из зарегистрированных бликов, координаты которого (αi, βi) сравниваются в блоке формирователя команд оперативного наведения 4 с ориентацией (α, β) оптической оси дефлектора 5, формирователь команд оперативного наведения 4 по результатам сравнения формирует команды, отражающие невязки Δαi=αi-α и Δβi=βi-β, которые вновь поступают в дефлектор 5 для их отработки, блок 4 формирует при Δαi=Δβi≈0 импульс запуска лазера 6, оптическая ось которого совмещена с оптической осью приемной оптики системы 1, и излучение Sc силового лазера 6 направляется по тому же пути в место, где был зарегистрирован отселектированный блик, проходит через поверхность моря и поступает на фотоприемник надводного локатора, где в результате воздействий серии поражающих импульсов происходит вывод из строя фотоприемника надводной локационной системы, декодер «свой-чужой» 7, включенный в схему системы функционального подавления подводного объекта в качестве функционального дополнения и служащий для избежания поражения собственных сил поиска путем решения задачи определения принадлежности лазерного поискового сигнала своим силам или противнику.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| ПОДВИЖНАЯ БОЕВАЯ МАШИНА С КОМПЛЕКСОМ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМОМУ, САМОНАВОДЯЩЕМУСЯ ОРУЖИЮ И АРТИЛЛЕРИЙСКОМУ ОРУЖИЮ С ЛАЗЕРНЫМИ ДАЛЬНОМЕРАМИ | 1998 |
|
RU2151360C1 |
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |

