Изобретение относится к области радиолокации и может быть использовано в РЛС обнаружения зенитных комплексов ближнего действия.
Известны устройства распознавания полей, включая вертолеты в режиме висения (патент США №4389647, патент ФРГ №3005230). Указанные устройства обеспечивают распознавание целей, имеющих вращающиеся части, путем анализа частоты модуляции отраженных сигналов. Для вертолетов в режиме висения типичное значение частоты модуляции, обусловленной вращением несущего винта, составляет величину порядка 10-20 Гц, что требует значительных затрат времени для анализа.
Недостатком этих устройств является то, что они не могут быть использованы в РЛС обнаружения низколетящих целей зенитных комплексов ближнего действия, обеспечивающих обзор пространства с высокой скоростью.
Из известных устройств наиболее близким по технической сущности является устройство обнаружения движущихся целей (прототип), осуществляющее выделение сигналов от воздушных целей, включая вертолеты в режиме висения, при обзоре на фоне мешающих отражений от подстилающей поверхности и описанное в литературе (например, Ю.И.Фельдман и др. Сопровождение движущихся целей. М.: Сов. Радио, 1978, стр.17). Прототип содержит детектор огибающей, режекторный фильтр, интегратор и первое пороговое устройство.
Недостатком прототипа является невозможность распознавания воздушных целей, включая вертолеты в режиме висения.
Таким образом, целью изобретения является расширение функциональных возможностей устройств обнаружения движущихся целей, а именно распознавание воздушных целей, включая вертолеты в режиме висения.
Поставленная цель достигается тем, что устройство обнаружения движущихся целей, содержащее детектор огибающей, режекторный фильтр, первый линейный детектор, интегратор и первое пороговое устройство, дополнительно содержит набор из N узкополосных фильтров, входы которых объединены со входом первого линейного детектора и подключены к выходу режекторного фильтра, N линейных детекторов от второго до N+1-го, входы которых подключены к выходам соответствующих узкополосных фильтров, схему отбора по максимуму, N входов которой подключены к выходам соответствующих линейных детекторов от второго до N+1-го, нормирователь, первый вход которого подключен к выходу схемы отбора по максимуму, а второй объединен со входом первого порогового устройства и подключен к выходу интегратора, второе пороговое устройство, вход которого подключен к выходу нормирователя, инвертор, первую и вторую схемы И, причем первые входы первой и второй схемы И объединены и подключены к выходу первого порогового устройства, второй вход первой схемы И и вход инвертора объединены и подключены к выходу второго порогового устройства, вход детектора огибающей является входом устройства, а выходы первой и второй схемы И - соответственно первым и вторым выходами устройства.
Дополнительно проведенные патентные исследования по классам G 01 S 13/00 показали, что авторам неизвестны технические решения, содержащие все отличительные признаки и позволяющие достигнуть того же результата, что и в заявляемом объекте. Это обстоятельство доказывает наличие критерия "существенное отличие".
Сущность изобретения поясняется чертежом, на котором представлена электрическая схема предлагаемого устройства.
Предлагаемое устройство содержит: детектор 1 огибающей, режекторный фильтр 2, первый линейный детектор 3, интегратор 4, первое пороговое устройство 5, N узкополосных фильтров 6, N линейных детекторов 7 от второго до N+1-го, схему 8 отбора по максимуму, нормирователь 3, второе пороговое устройство 10, инвертор 11, первую схему 12 И и вторую схему 13 И.
Предлагаемое устройство работает следующим образом. Импульсный сигнал с выхода разового детектора приемного устройства поступает на вход детектора 1 огибающей. Огибающая пачки импульсов с выхода детектора 1 огибающей поступает на вход режекторного фильтра 2, осуществляющего режекцию сигналов мешающих отражений и выделение сигналов от движущихся целей, включая сигналы от вертолетов в режиме висения, у которых спектр доплеровских частот имеет шумоподобный характер. Отселектированные сигналы от воздушных целей с выхода режекторного фильтра 2 поступают на первый линейный детектор 3 и N узкополосных фильтров 6, число которых выбрано из условия перекрытия полосы доплеровских частот РЛС, а полосы пропускания согласованы с временем облучения цели. Выходной сигнал первого линейного детектора 3 сглаживается интегратором 4, постоянная времени которого также согласована с временем облучения. В случае движущейся воздушной цели сигнал на выходе интегратора 4 и максимальный сигнал на выходах линейных детекторов 7 от второго до N+1-го будут мало отличаться друг от друга, а в случае облучения вертолета в режиме висения выходной сигнал интегратора 4 будет ориентировочно в  раз превышать максимальный сигнал на выходах линейных детекторов 7. Это обусловлено тем, что в случае движущейся цели сигнал имеет регулярное доплеровское смещение, в результате чего он сосредоточен в полосе одного из узкополосных фильтров 6, а в случае вертолета в режиме висения сигнал равномерно распределен между N узкополосными фильтрами 6. Максимальный сигнал линейных детекторов 7 от второго до N+1-го через схему 8 отбора по максимуму поступает на первый вход нормирователя 9, а выходной сигнал интегратора 4 поступает на второй вход нормирователя 9 и на вход первого порогового устройства 5. Нормирователь 9 осуществляет нормировку сигнала с выхода схемы 8 отбора по максимуму по сигналу с выхода интегратора 4, чем обеспечивается независимость работы устройства от дальности и ЭПР цели. Выходной сигнал нормирователя 9 поступает на вход второго порогового устройства 10. Сигнал на входе второго порогового устройства 10 в случае движущейся воздушной цели будет иметь амплитуду, превышающую порог срабатывания, а в случае шумоподобного сигнала срабатывание второго порогового устройства 10 не происходит. Таким образом, на выходе второго порогового устройства 10 будет присутствовать сигнал только при наличии сигнала от движущейся воздушной цели. Первое пороговое устройство 5 будет срабатывать при наличии как сигналов от движущихся воздушных целей, имеющих в спектре регулярную составляющую, так и сигналов от вертолетов в режиме висения, спектр доплеровских частот которых носит шумоподобный характер. Сигналы с выхода первого порогового устройства 5 подаются на первые входы первой схемы 12 И и второй схемы 13 И, а с выхода второго порогового устройства 5 на второй вход первой схемы 12 И и через инвертор 11 на второй вход второй схемы 13 И. Сигналы от движущихся воздушных целей будут присутствовать только на выходе первой схемы 12 И, который является первым выходом устройства, а сигналы от вертолетов в режиме висения будут только на выходе второй схемы 13 И, который является вторым выходом устройства. Таким образом обеспечивается обнаружение воздушных целей и их распознавание.
раз превышать максимальный сигнал на выходах линейных детекторов 7. Это обусловлено тем, что в случае движущейся цели сигнал имеет регулярное доплеровское смещение, в результате чего он сосредоточен в полосе одного из узкополосных фильтров 6, а в случае вертолета в режиме висения сигнал равномерно распределен между N узкополосными фильтрами 6. Максимальный сигнал линейных детекторов 7 от второго до N+1-го через схему 8 отбора по максимуму поступает на первый вход нормирователя 9, а выходной сигнал интегратора 4 поступает на второй вход нормирователя 9 и на вход первого порогового устройства 5. Нормирователь 9 осуществляет нормировку сигнала с выхода схемы 8 отбора по максимуму по сигналу с выхода интегратора 4, чем обеспечивается независимость работы устройства от дальности и ЭПР цели. Выходной сигнал нормирователя 9 поступает на вход второго порогового устройства 10. Сигнал на входе второго порогового устройства 10 в случае движущейся воздушной цели будет иметь амплитуду, превышающую порог срабатывания, а в случае шумоподобного сигнала срабатывание второго порогового устройства 10 не происходит. Таким образом, на выходе второго порогового устройства 10 будет присутствовать сигнал только при наличии сигнала от движущейся воздушной цели. Первое пороговое устройство 5 будет срабатывать при наличии как сигналов от движущихся воздушных целей, имеющих в спектре регулярную составляющую, так и сигналов от вертолетов в режиме висения, спектр доплеровских частот которых носит шумоподобный характер. Сигналы с выхода первого порогового устройства 5 подаются на первые входы первой схемы 12 И и второй схемы 13 И, а с выхода второго порогового устройства 5 на второй вход первой схемы 12 И и через инвертор 11 на второй вход второй схемы 13 И. Сигналы от движущихся воздушных целей будут присутствовать только на выходе первой схемы 12 И, который является первым выходом устройства, а сигналы от вертолетов в режиме висения будут только на выходе второй схемы 13 И, который является вторым выходом устройства. Таким образом обеспечивается обнаружение воздушных целей и их распознавание.
Для выполнения заявляемого устройства могут быть использованы известные устройства аналоговой и цифровой техники, и их реализация не вызывает затруднений.
Применение предлагаемого изобретения позволяет осуществить распознавание воздушных целей, включая вертолеты в режиме висения, в процессе обзора с высокой скоростью, когда имеет место дефицит времени для анализа радиолокационной информации и принятия решения о приоритете целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2006 |
|
RU2317569C1 |
| Способ дальнего обнаружения и распознавания малозаметных воздушных целей | 2022 |
|
RU2802089C1 |
| Устройство подавления узкополосных помех | 1988 |
|
SU1589402A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ С НОРМИРУЕМОЙ ВЕРОЯТНОСТЬЮ ЛОЖНЫХ СРАБАТЫВАНИЙ | 2014 |
|
RU2570230C1 |
| Устройство подавления узкополосных помех | 1983 |
|
SU1111256A1 |
| КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2003 |
|
RU2254594C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2042151C1 |
| Устройство для подавления помех | 1983 |
|
SU1095419A1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
Изобретение относится к области радиолокации. Технический результат - расширение функциональных возможностей, а именно - распознавание воздушных целей, включая вертолеты в режиме висения. Сигналы от движущихся воздушных целей присутствуют только на выходе первой схемы И, который является первым выходом устройства, а сигналы от вертолетов в режиме висения будут только на выходе второй схемы И, который является вторым выходом устройства. Таким образом обеспечивается обнаружение воздушных целей и их распознавание. 1 ил.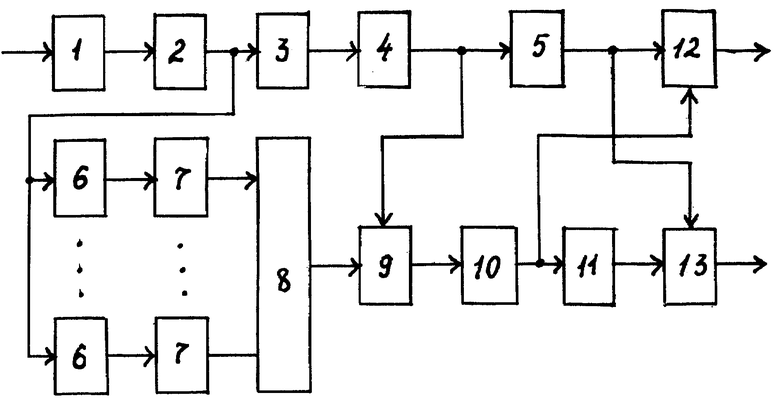
Устройство обнаружения движущихся целей, выполненное в виде последовательно соединенных детектора огибающей, режекторного фильтра, первого линейного детектора, интегратора и первого порогового устройства, отличающееся тем, что, с целью повышения вероятности обнаружения движущихся целей, с одновременным обеспечением в режиме висения, в него введены N узкополосных фильтров, N+1 линейных детекторов, схема выбора по максимуму, последовательно соединенные делитель, второе пороговое устройство, инвертор и первый элемент И, а также второй элемент И, причем вход каждого из N узкополосных фильтров соединен с выходом режекторного фильтра, выход соединен со входом каждого из N+1 линейных детекторов, выход каждого из которых соединен с соответствующим N входом схемы выбора по максимуму, выход которой соединен с первым входом делителя, второй вход которого соединен с выходом интегратора, выход первого порогового устройства соединен со вторым входом первого элемента И, а выход второго порогового устройства подключен к первому входу второго элемента И, второй вход которого соединен с выходом первого порогового устройства.
| Патент США №4389647 от 21.06.83, МНИ G 01 S 13/52, НКИ 343-7.3 | |||
| Ю.И.Фельдман и др | |||
| Сопровождение движущихся целей, М.: Сов | |||
| радио, 1978, стр.17. |

