Изобретение относится к области бортовых магнитометрических средств обнаружения магнитных аномалий и может быть использовано для определения местоположения скрытых магнитных масс.
Известно устройство, реализующее описанный в патенте США №4309659 (кл. G 01 V 3/40, G 01 V 3/165) метод определения местоположения магнитной аномалии. Это устройство содержит четыре (или три) компонентных магнитометра, преобразователь сигналов, гироскоп, вычислитель и индикаторы направления, уклонения, высоты и магнитного момента, причем выходы магнитометров подключены к соответствующим входам преобразователя, к одному из выходов которого подключен также гироскоп. Один из выходов преобразователя соединен со входом вычислителя, выход которого через преобразователь подключен к индикаторам направления, уклонения, высоты и магнитного момента.
Устройство работает следующим образом.
Измерения составляющих вектора напряженности магнитного поля с выходов магнитометров и сигнал курса носителя с гироскопа поступают на преобразователь сигналов, где аналоговые сигналы преобразуются в цифровой код. Сигналы с преобразователя поступают в вычислитель, который, решая уравнение шестой степени, вычисляет координаты и составляющие вектора магнитного момента подводной лодки (ПЛ).
Известно также устройство определения координат ПЛ содержащее три магнитометра, три фильтра, три блока вычитания и вычислитель, причем выход первого магнитометра подключен через первый фильтр ко входам первого и второго блоков вычитания, выход второго магнитометра подключен через второй фильтр ко входам второго и третьего блоков вычитания, выход третьего магнитометра подключен через третий фильтр ко входам первого и третьего блоков вычитания, а выходы блоков вычитания соединены с входами вычислителя.
В этом устройстве измеренные одновременно сигналы с выходов магнитометров поступают через соответствующие фильтры, отфильтровывающие помехи, на блоки вычитания, где образуются разностные сигналы ΔH12, ΔH23, ΔH13, в которых исключена помеха, обусловленная вариациями магнитного поля Земли (МПЗ). Разностные сигналы являются функциями координат и составляющих вектора магнитного момента ПЛ. Вычислитель, решая систему из трех нелинейных уравнений, по этим разностным сигналам определяет координаты ПЛ.
Недостатком известных устройств являются значительные ошибки в определении координат и составляющих вектора магнитного момента, так как обработка сигнала ведется без учета характеристик помех. Кроме того, наличие трех или четырех магниточувствительных датчиков требует стабилизации на носителе каждого из них, а также компенсации магнитных помех носителя в местах расположения датчиков, что существенно усложняет устройства.
Известно также устройство для определения глубины залегания магнитной аномалии (патент Франции №1351912 кл. G 01 V 3/08, G 01 V 3/14). Это устройство по своему назначению и технической сущности является наиболее близким предлагаемому техническому решению и по максимальному количеству сходных существенных признаков выбирается за прототип.
Система, выбранная за прототип (фиг.1), содержит магнитометр 1, фильтр 2, вычислитель глубины 3. Выход магнитометра 1 подключен к входу фильтра 2, выход которого подключен к входу вычислителя глубины 3.
Устройство работает следующим образом.
Измеренные значения напряженности магнитного поля, содержащие полезный сигнал, обусловленный магнитной аномалией, и помехи, вызванные магнитным полем носителя и вариациями МПЗ с выхода магнитометра 1 поступают на фильтр 2. С выхода фильтра 2 сигнал, очищенный от помех, лежащих вне полосы спектра полезного сигнала, поступает на вход вычислителя глубины 3, в котором определяется глубина залегания магнитной аномалии по известному выражению:
 ;
;
где m - константа, зависящая от направления движения носителя, причем
 , если курс носителя перпендикулярен диполю (ПЛ),
, если курс носителя перпендикулярен диполю (ПЛ),
m=1, если курс носителя параллелен диполю (ПЛ);
Hmax - максимальное значение напряженности магнитного поля;
 - максимальное значение градиента напряженности по курсу.
- максимальное значение градиента напряженности по курсу.
Это устройство обладает существенным недостатком, заключающимся в том, что оно определяет только одну координату - глубину залегания источника магнитной аномалии, что приводит к низкой точности в определении местоположения ПЛ.
Цель настоящего изобретения - увеличение точности определения местоположения ПЛ.
Это достигается тем, что в бортовую магнитометрическую систему, содержащую последовательно соединенные магнитометр, фильтр, вычислитель глубины, введены устройство оптимального обнаружения и оценивания параметров магнитометрического сигнала подводной лодки (МС ПЛ), датчик скорости носителя и преобразователь напряжение-код (ПНК).
Выходы фильтра и датчика скорости носителя подключены к соответствующим входам ПНК, выход которого подключен к входу устройства обнаружения и оценивания параметров МС ПЛ, сигналы с выхода которого, как и сигналы с выхода вычислителя глубины, поступают на соответствующие входы бортовой цифровой вычислительной машины (БЦВМ).
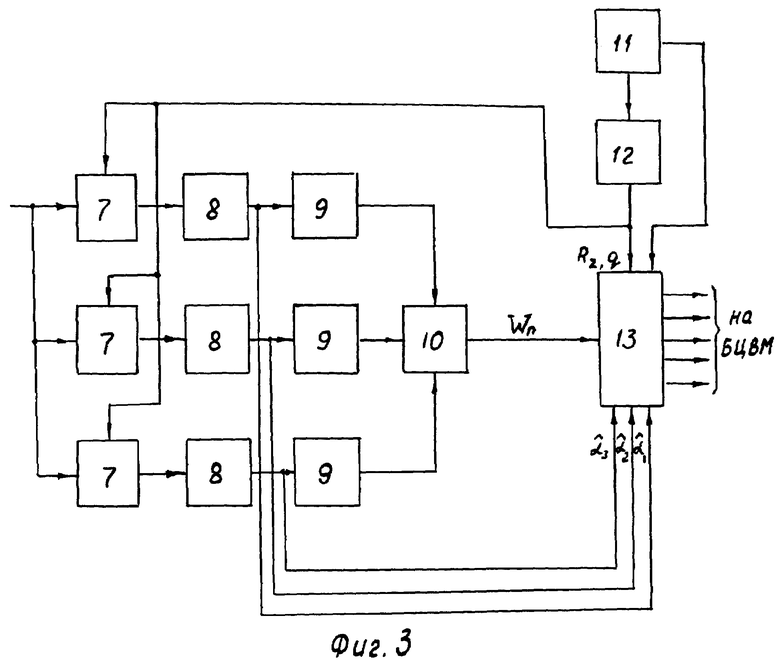
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема прототипа; на фиг.2 - структурная схема предложенной магнитометрической системы; на фиг.3 - структурная схема устройства оптимального обнаружения и оценивания параметров МС ПЛ;
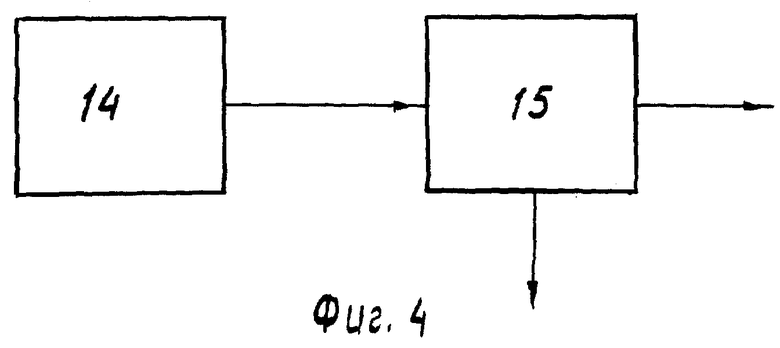
на фиг.4 - структурная схема блока управления;
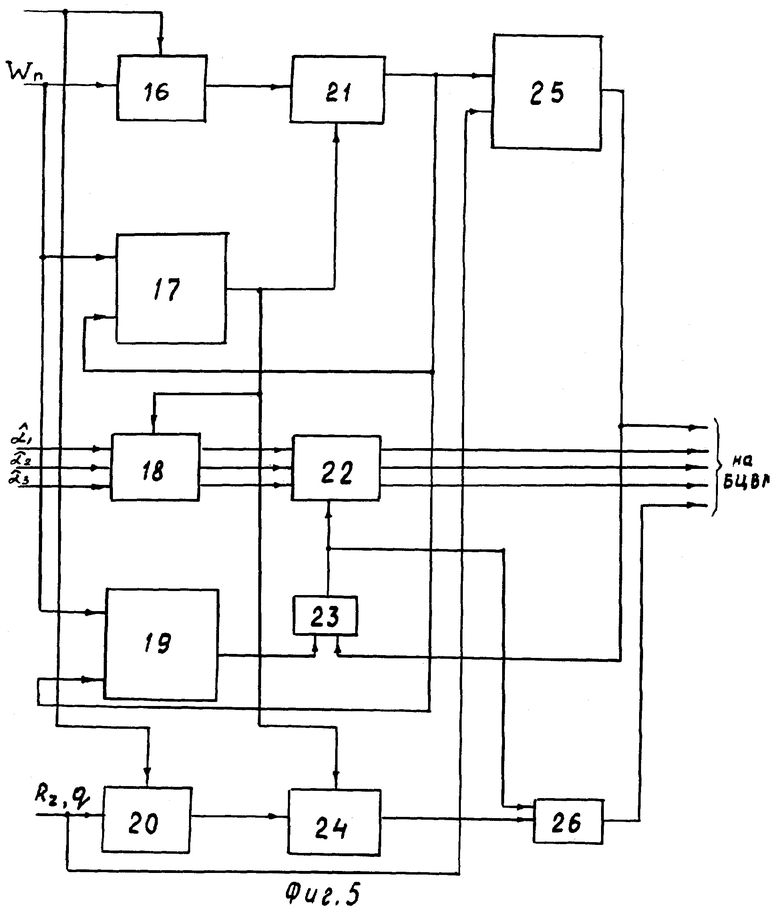
на фиг.5 - структурная схема решающего блока;
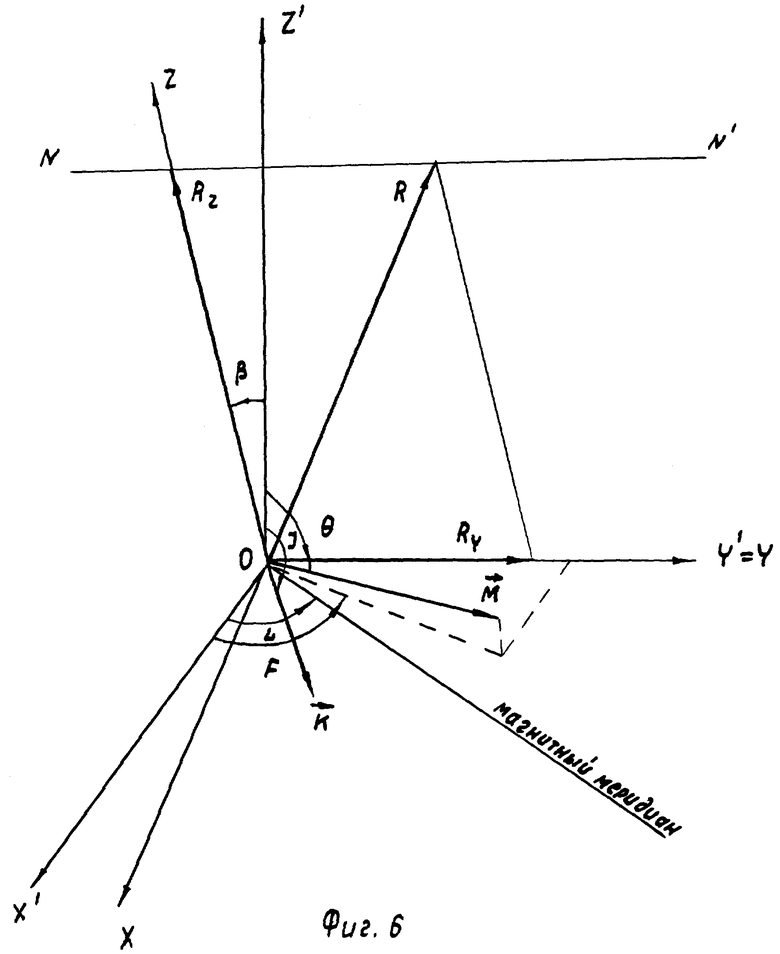
на фиг.6 изображена декартовая система координат XYZ с центром, совмещенным с точкой расположения ПЛ;
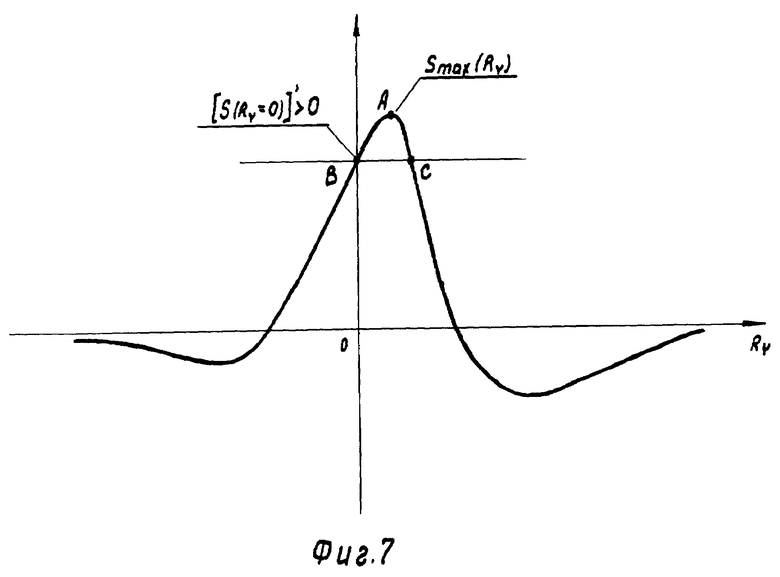
на фиг.7 изображено расположение точек траверса и максимума на кривой МС ПЛ;
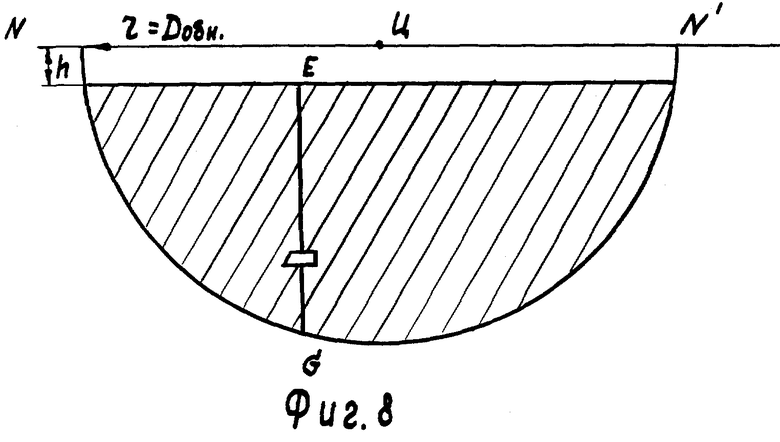
на фиг.8 представлена область определения местоположения ПЛ.
Предлагаемая система, как и прототип (фиг.2), содержит магнитометр 1, фильтр 2, вычислитель глубины 3. Выход магнитометра 1 подключен к входу фильтра 2, а выход фильтра 2 подключен к входу вычислителя глубины 3.
В отличие от прототипа в систему введены ПНК 4, устройство оптимального обнаружения и оценивания параметров МС ПЛ 5, и датчик скорости носителя 6. Выходы фильтра 2 и датчика скорости носителя 6 подключены к соответствующим входам ПНК 4, выход которого подключен к входу устройства оптимального обнаружения и оценивания параметров МС ПЛ 5, сигналы с выходов которого и сигналы с выхода фильтра 2 поступают на соответствующие входы БЦВМ.
Известно, что устройством оптимального обнаружения МС ПЛ на фоне гауссовых помех типа белый шум является корреляционный приемник в котором в качестве опорных функций используются три базисные функции Sj (RY) разложения МС ПЛ в ряд. В процессе поиска ПЛ величина наклонной траверсной дальности (НТД) неизвестна, поэтому необходим многоканальный корреляционный приемник, в котором каждый канал обработки соответствует определенной НТД. Поэтому устройство оптимального обнаружения и оценивания параметров МС ПЛ 5 (фиг.3) может содержать, например, три идентичные цепочки из последовательно соединенных перемножителя 7, интегратора 8, квадратора 9, а также сумматор 10, блок управления 11, блок памяти 12 и решающий блок 13. Входы перемножителей 7 соединены с выходом ПНК 4. Вторые входы перемножителей 7 соединены с выходом блока памяти 12. Выходы квадраторов 9 подключены к соответствующим входам сумматора 10. Один из выходов блока управления 11 соединен с входом блока памяти 12. Второй выход блока управления 11, выходы квадраторов 9, выход сумматора 10, выход блока памяти 12 соединены с соответствующими входами решающего блока 13.
Блок управления 11 (фиг.4) может содержать, например, кварцевый генератор 14 и формирователь частоты записи 15, выполненные на резонаторе РГ-05 и микросхемах 133 серии.
Блок памяти 12 представляет собой общеизвестное устройство, выполненное на интегральных микросхемах 556 серии.
Решающий блок 13 (фиг.5) может содержать, например, регистр числа 16, схему сравнения 17, регистр оценок 18, схему сравнения 19, регистр НТД 20, буферные регистры числа 21 и оценок 22, коммутатор 23, буферный регистр наклонной траверсной дальности (НТД) 24, схему сравнения 25, коммутатор 26.
Регистр числа 16, через буферный регистр числа 21 соединен с одним из входов схемы сравнения 25. Вход регистра числа 16 соединен с входами схем сравнения 17, 19 и является первым входом блока, а выход схемы сравнения 25 соединен с одним из входов коммутатора 23 и является первым выходом блока. Выход буферного регистра числа 21 соединен с другими входами схем сравнения 17, 19. Регистр НТД 20 через буферный регистр НТД 24 соединен с одним из входов коммутатора 26. Вход регистра НТД 20 соединен со вторым входом схемы сравнения 25 и является вторым входом блока, а выход коммутатора 26 является вторым выходом блока. Три информационных входа регистра оценок 18 являются третьим, четвертым и пятым входами блока, а выходы последовательно соединенного с ним буферного регистра оценок 22 являются третьим, четвертым и пятым выходами блока. Управляющие входы регистра числа 16 и регистра НТД 20 объединены и являются управляющим входом блока. Выход схемы сравнения 17 соединен с управляющими входами буферного регистра числа 21, регистра оценок 18 и буферного регистра НТД 24. Выход схемы сравнения 19 соединен со вторым входом коммутатора 23, выход которого соединен с управляющим входом буферного регистра оценок 22 и вторым входом коммутатора 26.
Предлагаемая система работает следующим образом.
Сигнал с выхода магнитометра 1 через фильтр 2, отфильтровывающий помехи, лежащие вне полосы спектра сигнала, поступает на вход ПНК 4, где он преобразовывается из аналогового вида в цифровой. С выхода датчика скорости носителя 6 на один из входов ПНК 4 поступает сигнал, обеспечивающий управление частотой дискретизации реализации с выхода фильтра 2 таким образом, чтобы выборка отсчетов производилась через равные пространственные интервалы. При увеличении скорости носителя пропорционально увеличивается частота дискретизации.
С выхода ПНК 4 аддитивная смесь МС ПЛ и помехи, преобразованная в цифровой сигнал, поступает на устройство оптимального обнаружения и оценивания параметров МС ПЛ 5. Отсчеты реализации с выхода ПНК 4 поступают на входы перемножителей 7. На другие входы перемножителей 7 с блока памяти 12 поступают отсчеты базисных функций Sj (RY). С выходов перемножителей 7 сигналы подаются на интеграторы 8, где происходит суммирование произведений отсчетов реализации и базисных функций. На выходах интеграторов 8 получаем оценки параметров МС ПЛ  ,
,  ,
,  , которые поступают на соответствующие входы решающего блока 14. В квадраторах 9 оценки параметров МС ПЛ возводятся в квадрат и суммируются в сумматоре 10. Такая обработка аддитивной смеси МС ПЛ и помехи производится последовательно во времени по n каналам НТД Rz, в результате чего на выходе сумматора образуется последовательность сигналов Wn, поступающих на решающий блок 13. С выхода блока управления 11 управляющие сигналы подаются на блок памяти 12 и решающий блок 13. С выхода блока памяти 12 в решающий блок 13 вводятся сигналы порога обнаружения и НТД, соответствующей каналу дальности, по которому производится обработка реализации в данный момент времени.
, которые поступают на соответствующие входы решающего блока 14. В квадраторах 9 оценки параметров МС ПЛ возводятся в квадрат и суммируются в сумматоре 10. Такая обработка аддитивной смеси МС ПЛ и помехи производится последовательно во времени по n каналам НТД Rz, в результате чего на выходе сумматора образуется последовательность сигналов Wn, поступающих на решающий блок 13. С выхода блока управления 11 управляющие сигналы подаются на блок памяти 12 и решающий блок 13. С выхода блока памяти 12 в решающий блок 13 вводятся сигналы порога обнаружения и НТД, соответствующей каналу дальности, по которому производится обработка реализации в данный момент времени.
В решающем блоке (фиг.5) сигнал Wn по первому каналу дальности поступает на регистр числа 16 и один из входов схем сравнения 17 и 19. На регистр оценок 18 поступают оценки параметров МС ПЛ  , , . На регистр НТД 20 поступает величина НТД Rz, на один из входов схемы сравнения 25 - величина порога обнаружения q. На управляющие входы регистров 16 и 20 поступают импульсы, разрешающие запись в регистр числа 16 сигнала Wn, в регистр НТД 20 - сигнала Rz. Схема сравнения 17 сравнивает текущее значение Wn с предыдущим. Если текущее значение Wn больше предыдущего, на выходе схемы сравнения 17 формируется переход из состояния "0" в состояние "I", по которому производится перезапись Wn из регистра числа 16 в буферный регистр числа 21, запись оценок , , в регистр оценок 18 и перезапись Rz из регистра НТД 20 в буферный регистр 24. Если последующее значение Wn больше предыдущего, то информация в регистрах 21, 18, 24 будет обновляться. Так производится сравнение величины Wn по 1, 2...n каналам дальности. Максимальное значение Wnmax из n каналов НТД подается на схему сравнения 25, где оно сравнивается с порогом обнаружения q. Если Wnmax>q, на выходе схемы сравнения 25 формируется признак обнаружения МС ПЛ. Схема сравнения 19, коммутатор 23 служат для выбора оценок , , , соответствующих Wnmax, при наличии признака обнаружения. Если Wn последующее меньше Wn предыдущего, схема сравнения 19 переходит из состояния "0" в состояние "1" и при наличии признака обнаружения МС ПЛ с выхода коммутатора 23 поступает сигнал разрешения в регистр 22 на перезапись оценок , , из регистра 18 в регистр 22 и выдачу оценки величины НТД
, , . На регистр НТД 20 поступает величина НТД Rz, на один из входов схемы сравнения 25 - величина порога обнаружения q. На управляющие входы регистров 16 и 20 поступают импульсы, разрешающие запись в регистр числа 16 сигнала Wn, в регистр НТД 20 - сигнала Rz. Схема сравнения 17 сравнивает текущее значение Wn с предыдущим. Если текущее значение Wn больше предыдущего, на выходе схемы сравнения 17 формируется переход из состояния "0" в состояние "I", по которому производится перезапись Wn из регистра числа 16 в буферный регистр числа 21, запись оценок , , в регистр оценок 18 и перезапись Rz из регистра НТД 20 в буферный регистр 24. Если последующее значение Wn больше предыдущего, то информация в регистрах 21, 18, 24 будет обновляться. Так производится сравнение величины Wn по 1, 2...n каналам дальности. Максимальное значение Wnmax из n каналов НТД подается на схему сравнения 25, где оно сравнивается с порогом обнаружения q. Если Wnmax>q, на выходе схемы сравнения 25 формируется признак обнаружения МС ПЛ. Схема сравнения 19, коммутатор 23 служат для выбора оценок , , , соответствующих Wnmax, при наличии признака обнаружения. Если Wn последующее меньше Wn предыдущего, схема сравнения 19 переходит из состояния "0" в состояние "1" и при наличии признака обнаружения МС ПЛ с выхода коммутатора 23 поступает сигнал разрешения в регистр 22 на перезапись оценок , , из регистра 18 в регистр 22 и выдачу оценки величины НТД  через коммутатор 26 в БЦВМ. Таким образам, в результате обработки входной информации на выходе решающего блока 13 формируются признак обнаружения МС ПЛ, оценки параметров МС ПЛ , , и , поступающие на БЦВМ, где по перечисленным оценкам вычисляется положение плоскости траверса, а по информации с выхода фильтра 2 вычисляется глубина погружения ПЛ.
через коммутатор 26 в БЦВМ. Таким образам, в результате обработки входной информации на выходе решающего блока 13 формируются признак обнаружения МС ПЛ, оценки параметров МС ПЛ , , и , поступающие на БЦВМ, где по перечисленным оценкам вычисляется положение плоскости траверса, а по информации с выхода фильтра 2 вычисляется глубина погружения ПЛ.
Известно, что МС ПЛ, формируемый магнитометром при полете носителя в магнитном поле ПЛ, можно представить в виде разложения в ряд по ортонормированным базисным функциям (см. Яроцкий В.А. Оптимальное обнаружение магнитного диполя // Измерительная техника - 1993 - №10. - с.43-45).

где
 - векторный параметр;
- векторный параметр;
Sj(Rz, RY) - базисные функции;
 - коэффициенты ряда;
- коэффициенты ряда;
RY=V·t;
V - скорость носителя;
t - текущее время;
Kx, KY, Kz - составляющие орта напряженности МПЗ
в правой декартовой прямоугольной системе координат XYZ (фиг.6), в которой центр совмещен с точкой расположения ПЛ, ось Y направлена по линии полета носителя NN', ось Z проходит через линию полета носителя, ось Х ортогональна первым двум осям;
Мх, MY, Мz - составляющие вектора магнитного момента ПЛ в системе координат XYZ;
 - ортонормированные базисные функции.
- ортонормированные базисные функции.
Для получения оценки амплитуды МС ПЛ подставим оценки  ,
,  и ортонормированные базисные функции в выражение (1):
и ортонормированные базисные функции в выражение (1):
Для нахождения экстремальных точек МС ПЛ дифференцируем выражение (2) по RY:
Анализ выражения (3) показывает, что множитель, стоящий перед квадратными скобками, не может быть равен нулю, т.к. величина Rz>0. Поэтому приравниваем к нулю выражение, стоящее в квадратных скобках:

Решение уравнения (4) даст три корня, т.е. в общем случае кривая МС ПЛ (фиг.7) имеет три экстремальные точки. Подставив найденные значения корней в выражение (2), определим абсолютный максимум МС ПЛ  и значение корня RY, соответствующее максимуму амплитуды МС ПЛ (точка А фиг.7).
и значение корня RY, соответствующее максимуму амплитуды МС ПЛ (точка А фиг.7).
Известно, что в точке траверса RY=0 (фиг.6), а амплитуда МС ПЛ в точке траверса равна:

Отношение амплитуды сигнала в точке траверса к максимальному значению МС ПЛ равно:

По величине этого отношения определяют положение плоскости траверса. Возникающую при этом двузначность (точки В и С фиг.7) устраняют, определяя знак поизводной МС ПЛ в точке траверса из выражения (3):

Из этого выражения следует, что знак производной определяется знаком оценки  .
.
Таким образом, устройство оптимального обнаружения и оценивания параметров МС ПЛ обеспечивает решение задачи оптимального обнаружения МС ПЛ и определения оценок параметров МС ПЛ, которые используются для определения положения плоскости траверса ПЛ.
Известно, что дальность обнаружения существующих магнитометрических систем Добн. равна 900 м ("Sea Technology", 1979, vol. 20 №1, "Ocean Science News", 1978, vol. 20, №47, "Defense Rsi Markets", 1979) при высоте полета носителя h=50 м. Область возможного присутствия ПЛ можно ограничить полусферой радиусом R=900 м и поверхностью воды (фиг.8). При этом ошибка в определении местоположения плоскости траверса EG составляет 1800 м (диаметр полусферы).
Математическое моделирование, проведенное на УЦВМ М-220, при следующих условиях: магнитный момент ПЛ М=250 Ка.м2, Rz=400 м, угловые координаты вектора магнитного момента ПЛ θ=F=135°, угловые координаты вектора напряженности МПЗ J=150°, L=90° (фиг.6) и среднеквадратичное значение помехи σn=0,04 мТ - показало, что ошибка в определении положения плоскости траверса ПЛ предлагаемой системой составила 120 м.
Отсюда следует, что предлагаемая система позволяет в пятнадцать раз увеличить точность определения положения плоскости траверса ПЛ по сравнению с существующими системами и прототипом.
Положительный эффект заключается в увеличении точности определения местоположения ПЛ по сравнению с прототипом. Дополнительный положительный эффект заключается в обеспечении оптимального обнаружения МС ПЛ, которое достигается тем, что структура устройства оптимального обнаружения и оценивания параметров МС ПЛ учитывает характеристики помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1985 |
|
SU1840171A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОЙ МАГНИТНОЙ АНОМАЛИИ | 2007 |
|
RU2411550C2 |
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНОЙ ЛОДКИ | 1978 |
|
SU1840306A1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| ПРОТИВОЛОДОЧНАЯ КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2014 |
|
RU2546726C1 |
| Дифференциальный способ поиска и обнаружения подводных лодок | 2022 |
|
RU2797407C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1991 |
|
RU2050557C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С КОРРЕКТИРУЕМЫМ ФИЛЬТРОМ | 1999 |
|
RU2156477C1 |

Изобретение относится к области бортовых магнитометрических средств обнаружения магнитных аномалий и может быть использовано для определения местоположения скрытых магнитных масс. Сущность: система содержит последовательно соединенные магнитометр, фильтр, вычислитель глубины. Кроме того, система содержит устройство оценивания весовых коэффициентов магнитометрического сигнала подводной лодки, датчик скорости носителя и преобразователь напряжение-код. При этом входы преобразователя Напряжение-код подключены к выходам фильтра и датчика скорости носителя, а его выход подключен к входу устройства оценивания весовых коэффициентов магнитометрического сигнала подводной лодки. Кроме того, устройство оценивания весовых коэффициентов магнитометрического сигнала содержит три канала из последовательно соединенных перемножителя, интегратора и квадратора. Технический результат: повышение точности определения координат подводной лодки и ее классификации по величине магнитного момента. 2 з.п. ф-лы, 8 ил.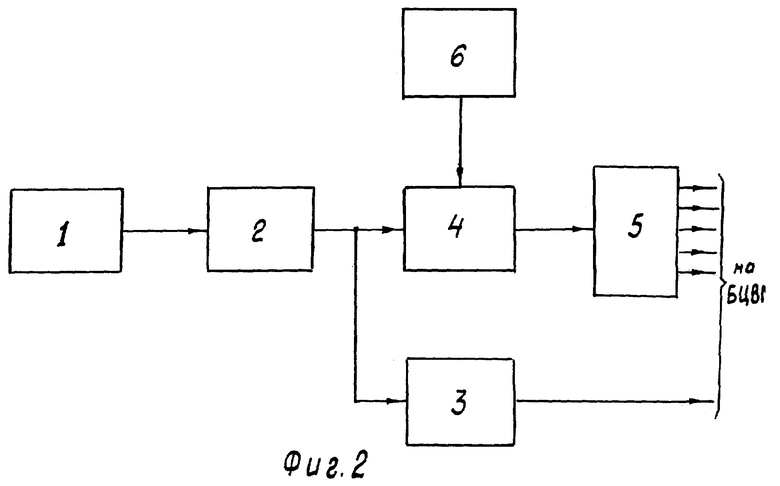
| Патент США №4309659, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |

