Изобретение относится к области бортовых магнитометрических средств обнаружения подводных лодок и может быть использовано для определения местоположения геомагнитных аномалий и затонувших кораблей.
Известно устройство для определения глубины залегания магнитной аномалии, позволяющее определять глубину погружения подводной лодки (патент Франции № 1351912, класс G 01 V 3/08, G 01 V 3/14). Известное устройство содержит магнитометр, фильтр и вычислитель, причем выход магнитометра подключен через фильтр к вычислителю. Устройство работает следующим образом. Сигнал с выхода магнитометра, содержащий как полезную составляющую, обусловленную магнитной аномалией, так и помехи, вызванные магнитным полем носителя и вариациями магнитного поля Земли, с выхода магнитометра поступает на фильтр, который отфильтровывает магнитные помехи носителя. С выхода фильтра сигнал, свободный от помех, обусловленных магнитным полем носителя, поступает на вычислитель, который вычисляет глубину залегания аномалии в соответствии с формулой:
где m - константа, зависящая от направления движения носителя;
Нmax - максимальное значение измеренной напряженности магнитного поля;
(∂н/∂и)max - максимальное значение производной напряженности измеренного магнитного поля по направлению движения носителя "и".
Известное устройство обладает существенными недостатками, заключающимися в том, что оно определяет только одну координату источника магнитной аномалии (глубину залегания), причем со значительными ошибками, вследствие того, что сигнал, поступающий на вычислитель, содержит помеху от вариаций магнитного поля Земли.
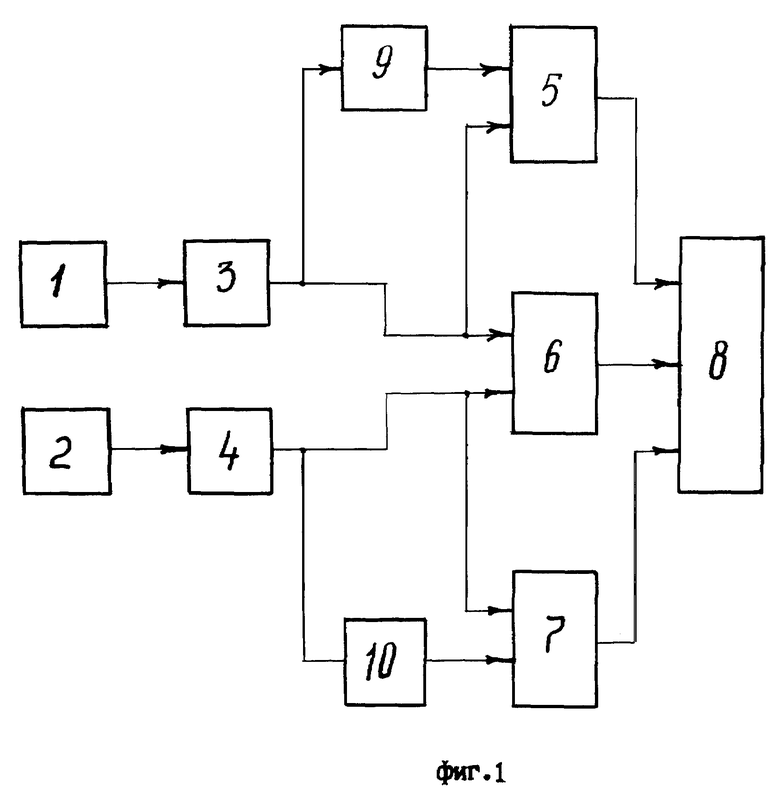
Известна также бортовая магнитометрическая система для определения координат подводной лодки (IEEE Transaction on Aerospace and Electronic Systems, vol. AES-13, № 3, 1977. Alastair D.Mc Aulay. Computerized Model Demonstrating Magnetic Submarine Localization). Эта система по своему назначению и по максимальному количеству сходных существенных признаков является наиболее близкой предлагаемому техническому решению, поэтому выбрана за прототип. Эта система (фиг.1) содержит два магнитометра 1 и 2, два фильтра 3 и 4, три блока вычитания 5, 6, 7, вычислитель 8 и два блока памяти 9 и 10. Выход одного магнитометра 1 подключен через фильтр 3 ко входам первого и второго блоков вычитания 5 и 6 и первого блока памяти 9, выход другого магнитометра 2 подключен через фильтр 4 ко входам второго и третьего блоков вычитания 6 и 7 и второго блока памяти 10. Выход блока памяти 9 соединен с другим входом первого блока вычитания 5, а выход блока памяти 10 соединен с другим входом третьего блока вычитания 7.
Выходы блоков вычитания 5, 6, 7 подключены ко входам вычислителя 8.
Система работает следующим образом. Сигналы с выходов магнитометров 1 и 2 поступают на фильтры 3 и 4, отфильтровывающие помеху, обусловленную магнитным полем носителя. С выходов фильтров 3 и 4 сигналы поступают на входы второго блока вычитания 6, где образуется разностный сигнал. Одновременно на выходах первого 5 и третьего 7 блоков вычитания образуются разностные сигналы между текущими значениями сигналов с выходов фильтров 3 и 4 и значениями сигналов, поступивших с выходов фильтров 3 и 4 на предыдущем такте измерения и хранящихся в блоках памяти 8 и 10. Разностные сигналы с блоков вычитания 5, 6, 7 поступают на вычислитель 8, который, решая систему трех уравнений, связывающих напряженность магнитного поля, создаваемого подводной лодкой, с координатами ее местоположения, определяет эти координаты. Так как в описанной известной системе сравниваются последовательные во времени сигналы, то это приводит к появлению в разностных сигналах, поступающих на вычислитель 8, помехи, обусловленной вариациями магнитного поля Земли, величина которой значительна по сравнению с уровнем полезного сигнала. Это приводит к существенным ошибкам в определении координат подводной лодки, что является недостатком прототипа.
Цель настоящего изобретения - повышение точности определения координат подводной лодки за счет исключения помех, обусловленных вариациями магнитного поля Земли.
Это достигается тем, что в известную бортовую магнитометрическую систему для определения координат подводной лодки, содержащую два магнитометра, два фильтра, три блока вычитания и вычислитель с соответствующими связями между ними, введены третий магнитометр и третий фильтр, при этом выход третьего магнитометра через третий фильтр подключен ко входам первого и третьего блоков вычитания. Такой состав и связи предлагаемой системы позволяют достичь нового положительного эффекта - исключить помехи, вызванные вариациями магнитного поля Земли, повысив тем самым точность определения координат подводной лодки, находящейся в погруженном состоянии, что является одной из важнейших задач повышения обороноспособности страны.
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема прототипа, а на фиг.2 изображена структурная схема предложенной магнитометрической системы.
Предлагаемая система, как и прототип, содержит два магнитометра 1 и 2, два фильтра 3 и 4, три блока вычитания 5, 6, 7 и вычислитель 8, Выход первого магнитометра 1 подключен через фильтр 3 ко входам первого и второго блоков вычитания 5 и 6, выход второго магнитометра 2 подключен через фильтр 4 ко входам второго и третьего блоков вычитания 6 и 7, а выходы блоков вычитания 5, 6, 7 подключены ко входам вычислителя 8.
В отличие от прототипа в систему введены третий магнитометр 11 и третий фильтр 12, причем выход третьего магнитометра 11 подключен через третий фильтр 12 ко входам первого и третьего блоков вычитания 5 и 7.
Эта система работает следующим образом. Сигналы с выходов магнитометров 1, 2, 11, измеренные одновременно, поступают через соответствующие фильтры 3, 4, 12, отфильтровывающие помехи, обусловленные магнитным полем носителя, на блоки вычитания 5, 6, 7, где образуются разностные сигналы ΔH12, ΔH23, ΔH13, в которых исключена помеха, обусловленная вариациями магнитного поля Земли. Разностные сигналы с выходов блоков вычитания поступают на вычислитель 8, который, решая систему трех уравнений, определяет координаты подводной лодки. Вычислитель 8 может быть выполнен, например, в виде специализированного вычислителя, решающего систему из трех нелинейных уравнений.
Напряженность магнитного поля, создаваемого подводной лодкой в точке расположения i-го магнитометра, в декартовой системе координат XYZ с началом в точке нахождения подводной лодки 0 и осями ОХ и OY, лежащими в горизонтальной плоскости, определяется известным выражением: (IEEE Transaction on Aerospace and Electronic Systems, vol. AES-13, №3, May 1977. Alastair D. Mc Aulay. Computerized Model Demonstrating Magnetic Submarine Localization):
где x0i, y0i, z0i - координаты точки расположения i-го магнитометра;
Мх, Мy, Mz - составляющие вектора магнитного момента подводной лодки (априорно известны из акустических измерений);
ax, ay, az - составляющие орта напряженности магнитного поля емли.
Сигнал на выходе i-го (i=1, 2, 3) магнитометра можно представить в виде суммы составляющих:
 , где
, где
HCi(t, x0i, y0i, z0i) - полезный сигнал, обусловленный подводной лодкой в точке расположения i-го магнитометра;
 - составляющая помехи, обусловленная магнитным полем носителя;
- составляющая помехи, обусловленная магнитным полем носителя;
Hвар.(t) - составляющая помехи, обусловленная вариациями магнитного поля Земли.
Сигналы на выходах фильтров не содержат составляющей помехи, обусловленной магнитным полем носителя. Поскольку расстояние между магнитометрами всегда значительно меньше, чем расстояние до источника вариаций магнитного поля Земли, считается, что составляющие Нвар.(t) для каждого из магнитометров одинаковы и разностные сигналы на выходах блоков вычитания не содержат помех от вариаций магнитного поля Земли.
Имея на борту носителя три магнитометра, можно получить три одновременно измеренных сигнала H1, H2, Н3, разности которых ΔH12=H1-Н2, ΔН23=Н2-Н3, ΔН13=H1-H3 позволяют получить систему уравнений, связывающих измеренные сигналы с координатами подводной лодки, свободную от воздействия вариаций магнитного поля Земли. Составляющие помехи, обусловленной вариациями магнитного поля Земли, содержащиеся в выходных сигналах магнитометров предлагаемой системы, взаимно компенсируются в блоках вычитания.
Например, разностный сигнал, образованный на выходе второго блока вычитания
ΔH12(t)=H1(t)-H2(t)=Hc1(t, x01, y01, z01)-Нс2(t, x02, y02, z02) и не содержит помехи от вариаций магнитного поля Земли.
Положительный эффект заключается в повышении точности определения координат подводной лодки за счет исключения помех, обусловленных вариациями магнитного поля Земли. Амплитуда помехи, обусловленной вариациями, составляет 20-40% от амплитуды полезного сигнала. Например, амплитуда вариаций магнитного поля Земли с периодом 0,2 сек равна 0,02 нТ (Михлин Б.З., Селезнев В.П., Селезнев А.В. Геомагнитная навигация, М.: Машиностроение, 1976), а амплитуда полезного сигнала 0,05-0,1 нТ. Результаты моделирования процедуры определения координат подводной лодки, показали, что при исключении помехи от вариаций магнитного поля Земли и отношении сигнал/помеха на выходе фильтров, равном 40, погрешность определения координат подводной лодки Δ=5% (IEEE Transaction on Aerospace and Electronic Systems, vol. AES-13, № 3, 1977. Alastair D. Mc Aulay. Computerized Model Demonstrating Magnetic Submarine Localization).
В случае наличия помехи от вариаций магнитного поля Hвар.=0,02 нТ и амплитуде полезного сигнала Hс=0,1 нТ отношение сигнал/помеха равно 5 и погрешность определения координат подводной лодки Δ=40%. Поэтому исключение помех от вариаций магнитного поля Земли из магнитных измерений позволит значительно повысить отношение сигнал/помехи и увеличить примерно на порядок точность определения координат подводной лодки.
Предложенная система определения координат подводной лодки может быть использована в авиационных системах противолодочной обороны, а также для определения местоположения скрытых магнитных масс.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1983 |
|
SU1840173A1 |
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1985 |
|
SU1840171A1 |
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОЙ МАГНИТНОЙ АНОМАЛИИ | 2007 |
|
RU2411550C2 |
| Арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2023 |
|
RU2836682C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| Способ поиска затонувшего радиационного источника автономным необитаемым подводным аппаратом | 2023 |
|
RU2825830C1 |
| Устройство для магнитных измерений с компенсацией помех от ускорений | 1982 |
|
SU1056091A1 |
Изобретение относится к области бортовых магнитометрических средств обнаружения подводных лодок и может быть использовано для определения местоположения геомагнитных аномалий и затонувших кораблей. Сущность: система содержит два магнитометра, два фильтра, три блока вычитания и вычислитель. При этом выход первого магнитометра подключен через первый фильтр ко входам первого и второго блоков вычитания. Выход второго магнитометра подключен через второй фильтр ко входам второго и третьего блоков вычитания. Выходы блоков вычитания соединены с вычислителем. Кроме того, система содержит дополнительные магнитометр и фильтр. При этом выход дополнительного магнитометра подключен через дополнительный фильтр ко входам первого и третьего блоков вычитания. Технический результат: повышение точности определения координат подводной лодки. 2 ил.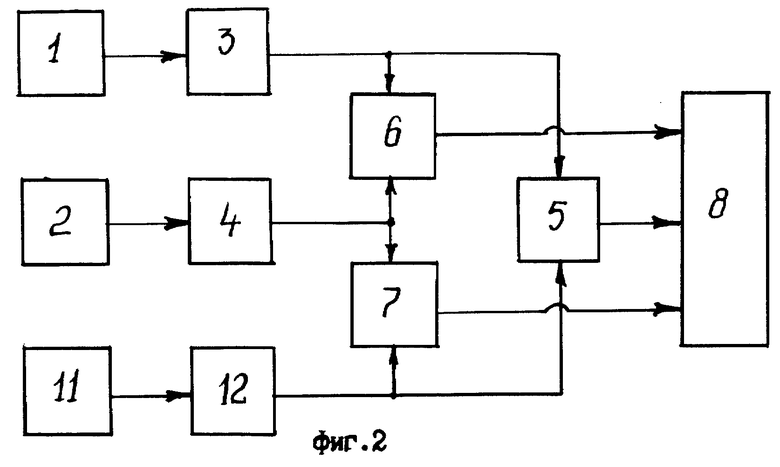
Бортовая магнитометрическая система для определения координат подводной лодки, содержащая два магнитометра, два фильтра, три блока вычитания и вычислитель, при этом выход первого магнитометра подключен через первый фильтр ко входам первого и второго блоков вычитания, выход второго магнитометра подключен через второй фильтр ко входам второго и третьего блоков вычитания, а выходы блоков вычитания соединены с вычислителем, отличающаяся тем, что, с целью повышения точности определения координат подводной лодки, в нее введены дополнительные магнитометр и фильтр, при этом выход дополнительного магнитометра подключен через дополнительный фильтр ко входам первого и третьего блоков вычитания.
| Способ получения олигомеров этилена | 1985 |
|
SU1351912A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| IEEE Transaction on Aerospase and Electronic Systems, vol | |||
| Насос | 1917 |
|
SU13A1 |
| Котел | 1921 |
|
SU246A1 |

