Изобретение относится к области магниторазведки, в частности противолодочной обороны, и предназначено для обнаружения, локализации и классификации локальных магнитных аномалий (ЛМА), в частности подводных лодок (ПЛ), при помощи установленных на подвижном носителе бортовых средств магнитных измерений, в частности магнитометров.
Известен способ определения местоположения магнитной аномалии (патент США №4309659, МПК G01V 3/40, 3/165, приор. 11.10.1979, опубл. 05.01.1982), включающий измерение на траектории движения носителя значений модуля вектора индукции (ВИ) магнитного поля Земли (МПЗ) и пяти независимых компонент тензора градиента МПЗ при помощи четырех компонентных магнитометров, симметрично расположенных на этом носителе, формирование и решение системы из шести нелинейных уравнений для шести неизвестных, включающих три координаты аномалии и три компоненты ее магнитного момента.
К основным недостаткам данного способа относится отсутствие методов и средств борьбы с магнитными помехами, в частности методов, которые обеспечивают компенсацию магнитных помех, создаваемых магнитными полями носителя, а также помех, обусловленных аппаратурными факторами, связанными с погрешностью выставки измерительных осей компонентных магнитометров относительно системы координат носителя и неидентичностью их коэффициентов преобразования. Как правило, эти помехи существенно превышают уровень сигнала, создаваемого ЛМА. Поэтому данный способ не в состоянии обеспечить определение местоположения ЛМА с приемлемым для практики уровнем погрешности.
Известна авиационная бортовая магнитометрическая система для определения местоположения ПЛ, которая является частным случаем ЛМА (а.с. СССР №1840171, МПК G01V 3/08, приор. 04.02.1985, опубл. 27.06.2006), реализующая способ локализации и классификации ПЛ, включающий следующие операции:
- измерение на траектории движения носителя модуля ВИМПЗ при помощи двух магнитометров, установленных в точках, пространственно разнесенных в пределах контура летательного аппарата, к примеру на концах крыльев самолета;
- фильтрацию измеряемых двумя магнитометрами значений модуля ВИМПЗ для устранения помех, лежащих вне спектра составляющей магнитометрического сигнала, создаваемой ПЛ;
- обработку сигналов обоих магнитометров для принятия решения об обнаружении ПЛ, включающую также определение наклонных траверзных дальностей D(l), D(2) и коэффициентов разложения αi (1), αi (2) (i=1:3) составляющей, индуцированной ПЛ в сигналах каждого из магнитометров;
- определение координат и магнитного момента ПЛ по представленным соотношениям.
Данный способ обладает рядом серьезных недостатков, заключающихся в следующем.
Обработка магнитометрической информации, заявленная в данном способе как оптимальная, по существу не является таковой. Это связано с тем, что магнитометрический сигнал U подвергается обработке в многоканальном корреляционном приемнике, который базируется на модели этого сигнала, содержащим только две составляющих - сигнальную S, индуцированную магнитным полем ПЛ и представленную в виде разложения по базисным функциям магнитного диполя Sj
и помеховую, которая представлена в виде нормального шума ε.
На самом деле, как следует из описания изобретения, на вход корреляционного приемника поступает сигнал UH, который представляет собой сигнал U, прошедший через полосовой фильтр
UH=HU,
где Н - оператор фильтрации, U - сигнал на выходе магнитометра.
При этом сигнал U представляет собой аддитивную суперпозицию

составляющих, индуцированных магнитным полем ПЛ - S, магнитным полем носителя - UМПН и магнитным полем Земли - UМПЗ с ее нормальной и аномальной составляющими. Даже приняв, что фильтрация полностью устраняет составляющую UМПЗ, индуцированную МПЗ, видим, что для реализации оптимальной обработки необходимо, чтобы корреляционный приемник строился на основе функций HSj и НUМПН, а не на основе функций Sj, как это сделано в а.с. №1840171. Поэтому обработка магнитометрической информации, выполняемая при помощи функций Sj, которые не согласованы с сигналами, поступающими на вход корреляционного приемника, не позволяет корректно решать задачу обнаружения, а тем более задачу локализации и классификации ПЛ.
Отдельно следует отметить роль помеховой составляющей НUМПН в решении поставленных задач. Для борьбы с магнитными помехами в а.с. №1840171 используется полосовая фильтрация магнитометрических сигналов, обеспечивающая устранение помех, лежащих вне спектра составляющей, создаваемой ПЛ. Практика поисковой магнитометрии показывает, что этих мер совершенно недостаточно для эффективного решения задач противолодочной обороны. Поэтому бортовые магнитометрические системы снабжаются устройствами, обеспечивающими компенсацию магнитных помех, которые индуцируются в чувствительных элементах магнитометров в процессе угловых и линейных эволюций носителя. Поскольку спектр этих эволюций в большинстве случаев перекрывает спектр полезного сигнала, то создаваемые данными эволюциями помехи, проходя через фильтр, приведут к уменьшению дальности обнаружения ПЛ и увеличению количества ложных тревог. Другим негативным фактором, который обусловлен прошедшими через фильтр помехами, является искажение формы составляющей, создаваемой ПЛ. Этот фактор служит дополнительной причиной погрешности локализации и классификации ПЛ.
Наиболее близким по технической сущности к заявляемому, принятым за прототип, является способ обнаружения ЛМА, в том числе ПЛ (Р.Б.Семевский и др. Специальная магнитометрия. СПб, изд. Наука, 2002, с.99-106), включающий следующие операции:
- измерение на траектории движения носителя значений модуля ВИМПЗ |В| при помощи квантового магнитометра, установленного на этом носителе,
- компенсацию магнитных помех носителя измерениям модуля ВИМПЗ, основанную на формировании сигнала помехи при помощи данных, полученных от векторного феррозондового магнитометра Вх, Ву, Bz и измерителей токов J электрооборудования носителя,
- обработку информации, включающей данные о модуле ВИМПЗ, скомпенсированные на величину магнитных помех носителя, а также данные о линейных перемещениях последнего, для принятия решения об обнаружении ЛМА и оценивания параметров контакта носителя с ЛМА - координаты траверза и величины наклонной траверзной дальности.
Обработка информации, применяемая в прототипе, основана на модели (1) магнитометрического сигнала, которая учитывает все значимые источники магнитных полей, служащих помехой магнитометру. Алгоритм обработки магнитометрической информации включает последовательное решение двух задач: обнаружения ЛМА и оценивания параметров ее контакта с носителем.
На вход алгоритма обнаружения ЛМА поступает сигнал  , скомпенсированный на величину помехи носителя. Здесь
, скомпенсированный на величину помехи носителя. Здесь  - оценка сигнала помехи, которая формируется в автономном компенсаторе магнитных помех носителя (Р.Б.Семевский и др. Специальная магнитометрия. СПб, изд. Наука, 2002, с.100-102). Достоинство последнего заключается в том, что с его помощью компенсируются все стационарные помехи, в том числе и те, характеристики которых (временные и частотные) совпадают с характеристиками полезного сигнала.
- оценка сигнала помехи, которая формируется в автономном компенсаторе магнитных помех носителя (Р.Б.Семевский и др. Специальная магнитометрия. СПб, изд. Наука, 2002, с.100-102). Достоинство последнего заключается в том, что с его помощью компенсируются все стационарные помехи, в том числе и те, характеристики которых (временные и частотные) совпадают с характеристиками полезного сигнала.
Алгоритм многоканального обнаружения синтезирован на основе следующей модели скомпенсированного сигнала ΔU в окне обработки данных, длительностью N тактов

где j - номер текущего такта измерений, характеризующий текущее время tj=jΔt или текущую координату rj=jΔtV,
Δt - интервал дискретизации, V - скорость носителя,
n - номер такта измерений в окне обработки данных, |n|≤N,
k=1:К - номер канала, настроенного на значение дальности Dk,
αi - коэффициенты разложения составляющей магнитометрического сигнала, создаваемой ЛМА,
φin - базисные функции магнитного диполя, которыми аппроксимируется составляющая магнитометрического сигнала, создаваемая ЛМА,
ψij+n - базисные функции помех, обусловленных аномальным МПЗ и его градиентом,
Δrin - линейные перемещения носителя, измеряемые соответствующими измерителями.
Выражения для коэффициентов разложения αi и базисных функций φin, представленные в системе координат носителя (ось X - по направлению движения, ось Y - по направлению к правому борту, ось Z дополняет эти оси до правой ортогональной системы координат), имеют следующий вид:



где
b, m, d - орты векторов индукции МПЗ, магнитного момента ПЛ и траверзной дальности, определенные следующими соотношениями:
d=(0, dy, dz)T, dy=rу/D, dz=rz/D,
 - величина наклонной траверзной дальности,
- величина наклонной траверзной дальности,
b=(cosψ cosJ, -sinψ cosJ, sinJ)T,
ψ - угол магнитного курса носителя,
J - угол магнитного наклонения,
М - величина магнитного момента ЛМА,
µ0 - магнитная постоянная.
Решающее правило обнаружения сигнала, который индуцируется в магнитометре объектом, обладающим собственным магнитным моментом, получено с использованием статистической теории принятия решений на основе критерия максимального правдоподобия. Оно сводится к вычислению канальных статистик λjk и сравнению их с порогами qk.
Если для какого-нибудь канала выполняется условие

то фиксируется факт обнаружения.
Канальная статистика λjk определяется выражением
где S - величина интервала адаптации к помехам среды.
В соотношении (4) под Rj 2(H) понимается мощность невязок для конкурирующих гипотез Н0k и Hik (подстрочные индексы 0 и 1 определяют гипотезы, характеризующие отсутствие или наличие полезной составляющей в сигнале магнитометра)


Входящие в (5) оценки коэффициентов разложения  ,
,  являются решениями по методу наименьших квадратов (МНК) соответствующих систем уравнений
являются решениями по методу наименьших квадратов (МНК) соответствующих систем уравнений


k=1:K, |n|≤N
Наряду с обнаружением в данном алгоритме осуществляется компенсация нестационарных помех, обусловленных линейными перемещениями носителя в аномальном МПЗ.
В случае превышения порога обнаружения производится оценивание параметров контакта носителя с ЛМА. В качестве наклонной траверзной дальности до ЛМА (дальности обнаружения) принимается номинальная дальность того канала, в котором реализовалось максимальное значение канальной статистики λjk. Время пересечения траверза (координата траверза) определяется как середина интервала, в котором статистика выбранного канала превышает порог.
К недостаткам прототипа относится то, что с его помощью невозможно определить значения бокового уклонения, глубины погружения, а также магнитного момента ЛМА.
Задачей настоящего изобретения является обеспечение возможности определения всех координат, характеризующих местоположение ЛМА, а также классификации ЛМА по величине ее магнитного момента.
Это достигается тем, что в известный способ обнаружения ЛМА, включающий операции:
- измерение на траектории движения носителя значений модуля ВИМПЗ,
- компенсацию магнитных помех носителя измерениям модуля ВИМПЗ, основанную на формировании сигнала помехи при помощи данных, полученных от векторного магнитометра и измерителей токов электрооборудования носителя,
- обработку информации, включающей данные о модуле ВИМПЗ, скомпенсированные на величину магнитных помех носителя, а также данные о линейных перемещениях последнего, для принятия решения об обнаружении ЛМА и оценивания параметров контакта носителя с ЛМА - координаты траверза и величины наклонной траверзной дальности,
введены дополнительные операции:
- измеряют одну из компонент градиента модуля ВИМПЗ,
- осуществляют компенсацию магнитных помех носителя измерениям градиента модуля ВИМПЗ,
- осуществляют совместную обработку скомпенсированных на величину помехи носителя измеренных параметров ВИМПЗ - модуля и компоненты градиента модуля, которая позволяет определить координаты и магнитный момент ЛМА.
Представим обоснование предлагаемого способа. Оно основано на том, что для определения шести искомых параметров ЛМА - трех пространственных координат rх, ry, rz и трех компонент магнитного момента Мх, Му, Mz необходимо получить не менее шести уравнений для этих неизвестных.
Как будет показано ниже, три уравнения можно получить из обработки модуля ВИМПЗ. Но этого недостаточно для решения поставленной задачи. Для того чтобы обеспечить возможность решения конечной задачи поиска ЛМА - определение ее координат и магнитного момента, предлагается наряду с модулем ВИМПЗ дополнительно измерять одну из компонент его градиента, обработка которой позволит получить недостающие уравнения.
В общем случае измеряемый градиент Г(r) представляет собой нормированную на величину базы L разность показаний двух скалярных магнитометров, отстоящих друг от друга на величину этой базы

где Uk - сигнал k-го магнитометра (k=1:2), модель которого дается соотношением (1). Исключение составляет задача измерения компоненты градиента вдоль направления движения носителя. В этом случае достаточно одного измерителя модуля ВИМПЗ.
Искомые уравнения доставляются из алгоритма обнаружения ЛМА, который синтезируется на основе измерений модуля ВИМПЗ и его градиента. Алгоритм обнаружения, синтезированный на основе измерений модуля ВИМПЗ, определен соотношениями (3)-(6). Структура алгоритма, который синтезируется на основе измерений градиента модуля ВИМПЗ, подобна вышеупомянутому. Отличие заключается лишь в конкретном виде полезного сигнала и помех. В частности, составляющая ГS градиентометрического сигнала, индуцированная ЛМА, имеет вид

в котором коэффициенты разложения и базисные функции  представляются следующими соотношениями:
представляются следующими соотношениями:
где е - орт вектора базы, характеризующий измеряемую компоненту градиента модуля ВИМПЗ. В частности, вектор е=(1, 0, 0)T определяет вид коэффициентов  , которые имеют место при измерении продольной компоненты градиента модуля ВИМПЗ; вектор е=(0, 1, 0)T определяет вид коэффициентов
, которые имеют место при измерении продольной компоненты градиента модуля ВИМПЗ; вектор е=(0, 1, 0)T определяет вид коэффициентов  , которые имеют место при измерении поперечной компоненты градиента модуля ВИМПЗ; вектор е=(0, 0, 1)T определяет вид коэффициентов , которые имеют место при измерении вертикальной компоненты градиента модуля ВИМПЗ.
, которые имеют место при измерении поперечной компоненты градиента модуля ВИМПЗ; вектор е=(0, 0, 1)T определяет вид коэффициентов , которые имеют место при измерении вертикальной компоненты градиента модуля ВИМПЗ.
В этих соотношениях индексом "T” обозначена операция транспонирования.
Алгоритм оценивания координат и магнитного момента ЛМА сводится к формированию и решению системы векторных уравнений


где  и
и  - векторы, составленные из коэффициентов разложения составляющей, индуцированной ЛМА в магнитометрическом и градиентометрическом сигналах соответственно.
- векторы, составленные из коэффициентов разложения составляющей, индуцированной ЛМА в магнитометрическом и градиентометрическом сигналах соответственно.
 и
и  - оценки вектора коэффициентов разложения составляющей, индуцированной ЛМА в магнитометрическом и градиентометрическом сигналах соответственно.
- оценки вектора коэффициентов разложения составляющей, индуцированной ЛМА в магнитометрическом и градиентометрическом сигналах соответственно.
Ф(D) - корреляционная матрица, элементы которой представляются соотношением

где  - ортонормированная система сигнальных базисных функций, являющаяся составной частью ортонормированной системы
- ортонормированная система сигнальных базисных функций, являющаяся составной частью ортонормированной системы  базисных функций k-го канала обнаружителя. Последняя строится посредством ортогонализации исходной системы функций
базисных функций k-го канала обнаружителя. Последняя строится посредством ортогонализации исходной системы функций  которыми определена модель (2) сигнала, поступающего на вход алгоритма обнаружения ЛМА. В соотношении (10) для корреляционной матрицы опущены индексы 'm' и 'g', которыми характеризуются магнито- и градиентометрические сигналы. Это сделано в силу очевидной однотипности подобных определений.
которыми определена модель (2) сигнала, поступающего на вход алгоритма обнаружения ЛМА. В соотношении (10) для корреляционной матрицы опущены индексы 'm' и 'g', которыми характеризуются магнито- и градиентометрические сигналы. Это сделано в силу очевидной однотипности подобных определений.
Т.о. система уравнений (9) представляет собой систему из семи нелинейных уравнений для пяти неизвестных rу, rz, Мх, Му, Mz. Левая часть этой системы включает семь параметров  ,
,  (i=1:3, k=1:4), каждый из которых является известной аналитической функцией своих аргументов ry, rz, Мх, Му, Mz, заданной соотношениями (2а) и (8а) соответственно.
(i=1:3, k=1:4), каждый из которых является известной аналитической функцией своих аргументов ry, rz, Мх, Му, Mz, заданной соотношениями (2а) и (8а) соответственно.
Правая часть системы содержит корреляционные матрицы Фm(D) и Фg(D) размерности 3×3 и 4×4, формирующиеся известным образом по соотношению (10), и семь оценок  ,
,  (i=1:3, k=1:4), которые являются МНК решениями системы уравнений (6б) - для магнитометрического сигнала и подобной системы уравнений - для градиентометрического сигнала. Отметим, что неизвестные rу и rz связаны соотношением
(i=1:3, k=1:4), которые являются МНК решениями системы уравнений (6б) - для магнитометрического сигнала и подобной системы уравнений - для градиентометрического сигнала. Отметим, что неизвестные rу и rz связаны соотношением

в котором величина наклонной траверзной дальности D, а также координата траверза rх находятся из вышеупомянутого алгоритма определения параметров контакта носителя с ЛМА.
С учетом соотношения (11) количество неизвестных сокращается до четырех, что позволяет решать поставленную задачу при помощи одних градиентных измерений, опираясь на соотношения (8а). Однако учитывая, что отношение сигнала к помехе при измерении модуля ВИМПЗ как правило, выше, чем при измерении градиента, целесообразно использовать полный набор уравнений (9). Численное решение этой системы уравнений позволит определить компоненты магнитного момента М, по величине которого осуществляется классификация ЛМА, а также координаты rу и rz, которые с найденной ранее координатой rх полностью определяют местоположение ЛМА.
Задача оценивания координат и магнитного момента ЛМА может также решаться как задача минимизации целевой функции
построенной в соответствии с критерием наименьших квадратов, где вектор - функция Wq(p) представляет собой векторную разность между измеренным сигналом от q-го измерителя (q=1 характеризует магнитометр, q=2 - магнитоградиентометр) и его модельным представлением вида (2), а вектор р есть вектор неизвестных параметров модели, включающий искомые параметры ry, rz, Мх, Му, Mz.
Заявляемый способ может быть реализован в установленном на подвижном носителе устройстве (см. чертеж), которое содержит:
- скалярный магнитометр 1, например квантовый магнитометр;
- скалярный магнитометр 2, идентичный магнитометру 1;
- векторный магнитометр 3, например трехкомпонентный феррозондовый магнитометр,
- измерители токов 4, установленные в помехонесущих цепях электрооборудования носителя;
- измерители линейных перемещений носителя 5, включающие, например, радиовысотомер и систему спутниковой или инерциальной навигации;
- бортовой вычислитель 6.
Устройство работает следующим образом. Данные, измеренные основными 1, 2 и дополнительными 3-5 измерителями, поступают на входы бортового вычислителя 6, который реализует все необходимые алгоритмы обработки, в том числе:
- алгоритм предварительной обработки;
- алгоритм компенсации магнитных помех, создаваемых носителем измерениям модуля ВИМПЗ;
- алгоритм компенсации магнитных помех, создаваемых носителем измерениям градиента модуля ВИМПЗ;
- алгоритм обнаружения ЛМА и оценивания параметров ее контакта с носителем;
- алгоритм оценивания координат и магнитного момента ЛМА, базирующийся на совместной обработке информации о скомпенсированных значениях модуля ВИМПЗ и его градиента.
Алгоритм предварительной обработки состоит в режекции лопастной помехи (для вертолетного варианта магнитометрической системы), а также в приведении всех измеренных данных к частоте выборки, которая необходима для реализации остальных алгоритмов.
Алгоритм компенсации магнитных помех измерениям модуля ВИМПЗ сводится к формированию оценки  магнитного поля, создаваемого носителем в месте размещения скалярного магнитометра 1, для чего используются показания векторного магнитометра 3, измерителей токов электрооборудования 4, а также значения коэффициентов помех, найденных предварительно в процессе специальных работ по настройке этого компенсатора. Оценка вычитается из показаний U1 скалярного магнитометра 1, осуществляя тем самым компенсацию магнитных помех, создаваемых носителем. В результате на вход алгоритма обнаружения поступают данные, из которых исключена помеха носителя
магнитного поля, создаваемого носителем в месте размещения скалярного магнитометра 1, для чего используются показания векторного магнитометра 3, измерителей токов электрооборудования 4, а также значения коэффициентов помех, найденных предварительно в процессе специальных работ по настройке этого компенсатора. Оценка вычитается из показаний U1 скалярного магнитометра 1, осуществляя тем самым компенсацию магнитных помех, создаваемых носителем. В результате на вход алгоритма обнаружения поступают данные, из которых исключена помеха носителя

Алгоритм компенсации магнитных помех измерениям градиента модуля ВИМПЗ подобен вышеизложенному. Он сводится к формированию оценки  градиента магнитного поля, создаваемого носителем в месте размещения скалярного магнитометра 1, для чего используются показания того же набора измерителей 3 и 4, а также значения коэффициентов помех градиентным измерениям, найденных предварительно в процессе специальных работ по настройке этого компенсатора. Оценка вычитается из показаний (7) магнитоградиентометра, осуществляя тем самым компенсацию магнитных помех, создаваемых носителем. В результате на вход алгоритма оценивания коэффициентов разложения
градиента магнитного поля, создаваемого носителем в месте размещения скалярного магнитометра 1, для чего используются показания того же набора измерителей 3 и 4, а также значения коэффициентов помех градиентным измерениям, найденных предварительно в процессе специальных работ по настройке этого компенсатора. Оценка вычитается из показаний (7) магнитоградиентометра, осуществляя тем самым компенсацию магнитных помех, создаваемых носителем. В результате на вход алгоритма оценивания коэффициентов разложения  градиентометрической составляющей сигнала ЛМА поступают данные, из которых исключена помеха носителя
градиентометрической составляющей сигнала ЛМА поступают данные, из которых исключена помеха носителя

Алгоритм обнаружения ЛМА реализуется на основе обработки магнитометрического сигнала (12а) по соотношениям (3)-(6). Выходным параметром этого алгоритма является признак обнаружения ЛМА, который формируется при выполнении условия (3).
После принятия решения об обнаружении ЛМА запускается алгоритм оценивания параметров контакта носителя с ЛМА: траверзной дальности D и координаты траверза rх, а также алгоритмы оценивания коэффициентов разложения  и
и  сигналов (12а) и (12б). Коэффициенты
сигналов (12а) и (12б). Коэффициенты  представляют собой МНК решение системы уравнений (6б) для магнитометрического сигнала (12а) при значении текущей координаты rj, которая соответствует найденной ранее координате траверза rх. Коэффициенты
представляют собой МНК решение системы уравнений (6б) для магнитометрического сигнала (12а) при значении текущей координаты rj, которая соответствует найденной ранее координате траверза rх. Коэффициенты  представляют собой МНК решение системы уравнений для градиентометрического сигнала (12б), аналогичной (6б), при том же значении текущей координаты.
представляют собой МНК решение системы уравнений для градиентометрического сигнала (12б), аналогичной (6б), при том же значении текущей координаты.
Найденные значения оценок  ,
,  (i=1:3, k=1:4) поступают на вход алгоритма оценивания координат и магнитного момента ЛМА, который формирует систему уравнений (9), представляющую собой систему из семи нелинейных уравнений для пяти неизвестных rу, rz, Мх, Му, Mz. Левая часть этой системы включает семь параметров
(i=1:3, k=1:4) поступают на вход алгоритма оценивания координат и магнитного момента ЛМА, который формирует систему уравнений (9), представляющую собой систему из семи нелинейных уравнений для пяти неизвестных rу, rz, Мх, Му, Mz. Левая часть этой системы включает семь параметров  ,
,  (i=1:3, k=1:4), каждый из которых является известной аналитической функцией своих аргументов ry, rz, Мх, Му, Mz, заданной соотношениями (2а) и (8а) соответственно. Правая часть системы содержит корреляционные матрицы Фm(D) и Фg(D), которые формируются известным образом по соотношению (10), и семь вышеупомянутых оценок
(i=1:3, k=1:4), каждый из которых является известной аналитической функцией своих аргументов ry, rz, Мх, Му, Mz, заданной соотношениями (2а) и (8а) соответственно. Правая часть системы содержит корреляционные матрицы Фm(D) и Фg(D), которые формируются известным образом по соотношению (10), и семь вышеупомянутых оценок  ,
,  . Численное решение этой системы уравнений позволяет определить компоненты магнитного момента М, по величине которого осуществляется классификация ЛМА, а также координаты rу и rz, которые с найденной ранее координатой rх полностью определяют местоположение ЛМА.
. Численное решение этой системы уравнений позволяет определить компоненты магнитного момента М, по величине которого осуществляется классификация ЛМА, а также координаты rу и rz, которые с найденной ранее координатой rх полностью определяют местоположение ЛМА.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1983 |
|
SU1840173A1 |
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1985 |
|
SU1840171A1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ПОДВОДНЫХ ЛОДОК | 2011 |
|
RU2472183C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ (ВАРИАНТЫ) | 2010 |
|
RU2452652C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ ЭФФЕКТА ГЕОМАГНИТНОЙ ПСЕВДОБУРИ | 2013 |
|
RU2526234C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| Градиентометрический способ магнитной съемки и устройство для его осуществления | 2018 |
|
RU2686855C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2007 |
|
RU2331090C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
Изобретение относится к области магниторазведки и предназначено для обнаружения, локализации и классификации локальных магнитных аномалий (ЛМА) при помощи установленных на подвижном носителе бортовых средств магнитных измерений, в частности магнитометров. Технический результат: возможность определения всех координат, характеризующих местоположение ЛМА, классификации ЛМА по величине ее магнитного момента. Сущность: способ включает измерение на траектории движения носителя значений модуля вектора индукции магнитного поля Земли (ВИМПЗ) и одной из компонент градиента модуля ВИМПЗ, компенсацию магнитных помех носителя этим измерениям, обработку информации о модуле ВИМПЗ для принятия решения об обнаружении ЛМА и оценивания параметров контакта носителя с ЛМА - координаты траверза и величины наклонной траверзной дальности, совместную обработку модуля и компоненты градиента модуля, которая позволяет определить координаты и магнитный момент ЛМА. 1 ил.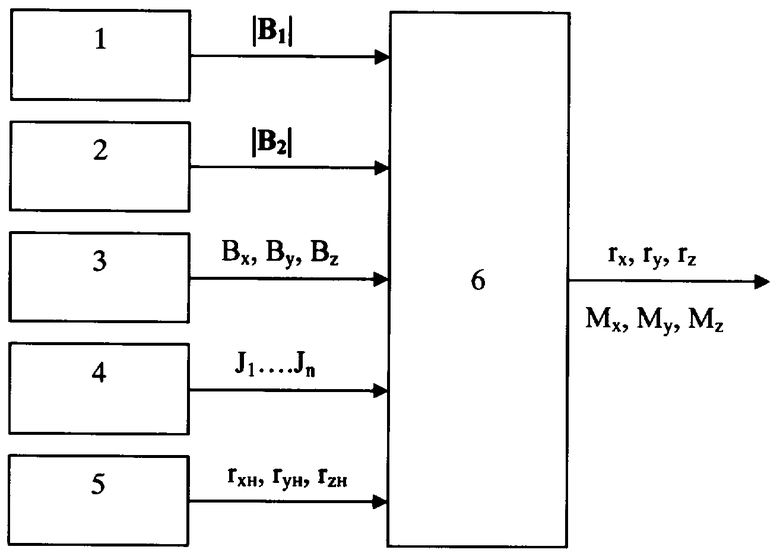
Способ обнаружения локальной магнитной аномалии при помощи магнитометрических средств, установленных на подвижном носителе, включающий измерение на траектории движения носителя модуля вектора индукции магнитного поля Земли, компенсацию магнитных помех, создаваемых носителем этим измерениям, обработку принятой информации для принятия решения об обнаружении локальной магнитной аномалии и оценивания параметров контакта носителя с этой аномалией - координаты траверза и величины наклонной траверзной дальности, отличающийся тем, что дополнительно измеряют одну из компонент градиента модуля вектора индукции магнитного поля Земли, производят компенсацию магнитных помех, создаваемых носителем этим измерениям, и в процессе совместной обработки модуля и компоненты градиента модуля вектора индукции магнитного поля Земли определяют координаты и магнитный момент локальной магнитной аномалии.
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1985 |
|
SU1840171A1 |
| Мостовой кран | 1989 |
|
SU1740306A1 |
| RU 2075097 С1, 10.03.1997 | |||
| US 4309659 А, 05.01.1982 | |||
| US 6841994 В1, 11.01.2005 | |||
| US 6476610 B1, 05.11.2002 | |||
| Способ получения олигомеров этилена | 1985 |
|
SU1351912A1 |

