Предлагаемое изобретение относится к экспериментальным установкам, предназначенным для исследования на упруго- и динамически-подобных моделях влияния упругости конструкции крылатых летательных аппаратов на характеристики их продольной управляемости и устойчивости (главным образом, реверсы рулей высоты) в "свободном" полете моделей в аэродинамических трубах.
Известен ряд конструкций "плавающих" подвесок. В частности, типичной является применяемая в США так называемая двухтросовая подвеска.
Существо ее заключается в следующем. Модель имеет пять степеней свободы (исключено только движение вперед-назад) благодаря тому, что она подвешена на двух тросах, располагающихся соответственно в горизонтальной и вертикальной плоскостях и крепящихся к стенкам и полу. На модели предусматриваются две пары блоков, через которые перекинуты петли тросов, натягиваемых пружиной.
Указанная подвеска предназначена для исследования флаттера, однако она может быть использована более подробно см. Proc. Of Symposium on Aeroelasnic Dynamic Modeling Technjlogy 23-25 Sept 1963, Dayton, Ohio, 1964) для измерения характеристик управляемости самолета в свободном полете, в частности, для измерения параметров, характеризующих продольную управляемость и устойчивость. В числе этих параметров в первую очередь углы атаки α и углы отклонения руля высоты δр.в., в частности соответствующие моменту равенства подъемной силы Y - весу модели G, то есть горизонтальному полету, а также распределение давления по модели  .
.
Основным недостатком известной подвески (при ее использовании для рассматриваемых целей) представляется трудность сколько-нибудь точного измерения подъемной силы, угла атаки.
Достаточно сказать, что в настоящее время наиболее просто и точно угол атаки модели на известной подвеске измерить по кадрам киносъемки.
С современной точки зрения эту возможность можно назвать лишь сравнительно простой и тем более сравнительно точной. Существенные искажения в обтекание модели вносят тросы подвески, в том числе страховочные тросы. Вся конструкция подвески в целом представляется сравнительно сложной для рассматриваемых целей. Указанные недостатки устраняются в предлагаемой подвеске. Собственно целью предложения является повышение точности измерений и упрощение подвески. Достигается это использованием известного (См. авт.св. Г.А.Амирьянца и Ю.Ф.Яремчукак "Способ определения характеристик продольной управляемости и устойчивости", № 1542959/40-23 способа измерения характеристик продольной управляемости крылатых летательных аппаратов, главной особенностью которого является сохранение у модели одной единственной степени свободы - поворота вокруг оси, проходящей вблизи ее центра масс (впереди аэродинамического фокуса) в плоскости симметрии модели. При этом условия, соответствующие равенству силы веса модели подъемной силе, есть условия "свободного" полета модели. Все необходимые измерения проводятся просто и с высокой точностью благодаря использованию хорошо проверенных весьма точных датчиков и регистрирующей аппаратуры, например, тензоаппаратуры.
Предлагаемое изобретение отличается от известного устройства следующим. Модель кренится, например, с помощью стреловидной жесткой стойки, расположенной в плоскости тангажа, к шарнирному тензометрированному узлу этой стойки, обеспечивающему только поворот модели вокруг центра масс в плоскости тангажа и непрерывное измерение разности подъемной силы и силы веса модели. Шарнирный узел соединен со стойкой с помощью упругих элементов, воспринимающих только лобовую силу, и ряда упругих элементов, воспринимающих моменты крена и рыскания, а также боковую силу и практически не препятствующих только одному - поступательному движению модели в направлении действия подъемной силы, измеряемой посредством тензометрирования единственного упругого элемента, сдерживающего это движение. В момент запуска и остановки аэродинамической трубы хвостовая часть модели поддерживается стопором, обеспечивающим близкий к нулевому угол атаки модели и освобождающим модель (отходящим назад по потоку) в установившемся потоке. Для повышения безопасности от флаттера или чрезмерных вибраций пружинный (электромеханический или иной) стопор обеспечивает по сигналу индикатора флаттера стопорение модели при возникновении нарастающих колебаний. Для демпфирования возможного резкого изменения угла атаки модели и колебаний модели в плоскости тангажа как жесткого целого, снижающих точность измерений, шарнирный узел включает соответствующий демпфер, соосный с шарниром.
Собственно "плавающей" подвеска является в один единственный момент времени: когда плавно меняя угол отклонения руля высоты, а следовательно, и угол атаки, достигают нулевого значения разности Y-G. Углы α и δ определяют в этот момент искомые параметры "свободно" летающей модели.
Момент демпфирования при этом близок к 0; или он равен нулю строго, если равенство Y-G=0 поддерживается при заданном числе М достаточно долго, несколько секунд, например, с помощью автоматического устройства.
В последующем изложении предлагаемое изобретение поясняется на чертежах.
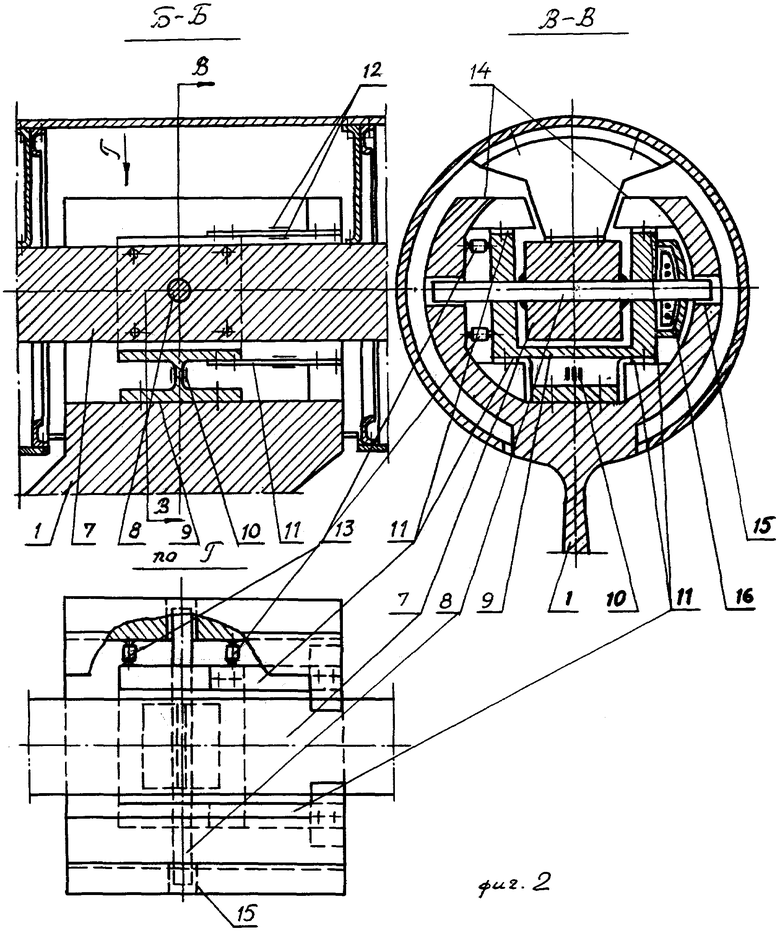
На фиг.1 показан общий вид подвески с моделью, на фиг.2 - в увеличенном масштабе сечения, поясняющие конструкцию основных элементов подвески. Подвеска состоит из стойки 1, на которой через шарнирный узел 2 закреплена упругоподобная модель 3, и стойка 4, на которой соосно с моделью за нею по потоку расположен пружинный стопор 5 модели и его привод 6.
Лонжерон 7 соединен со стойкой 1 посредством шарнирного пальца 8 тензометрированной вилки 9 с тензодатчиками 10, четырех тензометрированных тонкостенных лент 11 с тензодатчиками 12, воспринимающих только лобовую силу (и, если это желательно, измеряющих ее), а также четырех упругих стержней 13 (с проточками в их основаниях), воспринимающих момент крена, момент рыскания и боковую силу. Кожух жесткой стойки 1, охватывающий лонжерон 7, имеет упоры 14, ограничивающие углы атаки модели, и отверстия 15, в которые с зазором в 1-2 мм входит шарнирный палец 8. Соосно с шарнирным пальцем расположен демпфер 16 модели.
Работа устройства заключается в следующем. На удобообтекаемой стреловидной стойке 1 примерно по оси симметрии аэродинамической трубы закреплен шарнирный узел 2, обеспечивающий модели 3 единственную степень свободы - поворот вокруг центра тяжести модели в ее плоскости тангажа (плоскости симметрии). Перед запуском и остановкой аэродинамической трубы модель благодаря выдвижению расположенного на стойке 4 пружинного стопора 5 в положение, показанное на фиг.1 штрихпунктирной линией, фиксирует модель при угле атаки близком к 0. Тем самым обеспечивается сохранение упругой модели в неустановившемся потоке. Этот же стопор используется для ограничения движения модели и в неустановившемся потоке при возникновении флаттера или недопустимых вибраций. Для этого с помощью привода 6 пружинный стопор 5 отводится назад по потоку (пружина стопора 5 при этом сжимается) и при необходимости по сигналу индикатора флаттера связь между приводом 6 и собственно стопором 5 обрывается и под действием разжимающейся пружины стопор 5 движется вперед, "ловит" и фиксирует хвостовую часть лонжерона фюзеляжа модели. Осуществляется это с необходимым при этом быстродействием, а медленно (вообще говоря) удлиняющий свой шток привод 6 "дожимает" стопор 5, вновь жестко соединяясь с ним и при необходимости вновь отводясь назад, взводя пружину, расфиксируя модель и т.д.
В установившемся потоке аэродинамические и массовые нагрузки, которые действующие на модель, воспринимаются лонжероном 7, фиг.2, моделирующим упругие характеристики фюзеляжа, и шарнирным пальцем 8, опирающимся на подшипники вилки 9, соединенной со стойкой 1.
Вилка 9 тензометрирована, ее тензодатчики 10 позволяют измерить разность подъемной силы и силы веса, действующих на модель. Поскольку тонкостенной элемент вилки 9 (или иначе выполненный, но аналогичного назначения элемент) не может воспринять лобовую силу, момент крена, момент рысканья, боковую силу), в конструкцию введены соответствующие элементы, позволяющие воспринять указанные нагрузки, передать их на жесткую стойку 1 и при этом практически не исказить показаний тензодатчика 10. Элементами, воспринимающими только лобовую силу, являются, как уже отмечалось, четыре тонкостенные ленты 11 с тензодатчиками 12, а элементами, воспринимающими только момент крена, момент рысканья и боковую силу, являются четыре стержня 13, соединяющие вилку 9 и стойку 1. Стержни 13 имеют у своих оснований глубокие проточки, благодаря которым они, воспринимая необходимые нагрузки, практически не препятствуют смещению модели вверх-вниз в направлении действия подъемной силы.
Естественно, что конструкция упругих элементов, в той числе тензометрированных может быть и иной, тем же должен оставаться принцип: воспринять лобовую силу (если желательно, то и измерять ее), воспринять боковую силу, момент крена, рысканья и при этом не сдержать смещение модели вверх-вниз и обеспечить тем самым точное измерение подъемной силы.
Упоры 14 ограничивают углы атаки модели; этим кроме прочего обеспечивается надежная работа "ловушки" стопором 5. Для повышения вероятности сохранения модели при возможном разрушении чувствительного элемента 10 или ограничивающих элементов 11 и 13 шарнирный палец 8 с зазором в 1-2 мм входит в отверстие 15 кожуха стойки 1, охватывающего лонжерон 7. Соосно с пальцем 8 работает демпфер 16 (например, гидравлический), подвижный перфорированный элемент которого жестко связан с пальцем 8, который в свою очередь жестко связан с лонжероном 7. Неподвижная камера демпфера с рядом отсеков, заполненных жидкостью, соединена с вилкой 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения характеристик продольной управляемости и устойчивости самолетов | 1972 |
|
SU1839900A1 |
| АЭРОДИНАМИЧЕСКИЕ ТЕНЗОМЕТРИЧЕСКИЕ ВЕСЫ | 1973 |
|
SU390399A1 |
| Многокомпонентные тензометрические весы | 1981 |
|
SU994924A2 |
| Многокомпонентные тензометрические весы | 1975 |
|
SU531036A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПРОДОЛЬНОЙ УПРАВЛЯЕМОСТИ И УСТОЙЧИВОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1971 |
|
SU1839874A1 |
| СПИРОИДНЫЙ ВИНГЛЕТ | 2016 |
|
RU2637149C1 |
| Аэродинамические тензометрические весы | 1972 |
|
SU566141A1 |
| ЗАКОНЦОВКА КРЫЛА (ВАРИАНТЫ) | 2017 |
|
RU2655571C1 |
| ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ | 2017 |
|
RU2682700C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
Изобретение относится к экспериментальным установкам, предназначенным для исследования на упруго-динамически-подобных моделях влияния упругости конструкции крылатых летательных аппаратов на характеристики их продольной управляемости устойчивости в «свободном» полете моделей в аэродинамических трубах. Сущность: устройство содержит жесткую стойку с шарнирным узлом, который проходит впереди аэродинамического фокуса нормально к плоскости симметрии модели. Кроме того, шарнирный узел содержит вилку, связанную с лонжероном модели и со стойкой. При этом вилка связана с лонжероном модели поперечной осью, а со стойкой - посредством тензометрированных упругих элементов, четырех тонких лент, четырех стержней и пластины. Причем ленты расположены сзади оси шарнира параллельно оси аэродинамической трубы. Стержни расположены параллельно поперечной оси трубы на боковой поверхности вилки, а пластины расположены в вертикальной плоскости, проходящей через ось шарнира. Технический результат: повышение точности измерения усилий и моментов. 2 ил.
Устройство для подвески полых упруго-динамически-подобных моделей крылатых летательных аппаратов в аэродинамических трубах при исследованиях характеристик продольной устойчивости и управляемости, включающее жесткую стойку, шарнирный узел которого проходит впереди аэродинамического фокуса нормально к плоскости симметрии модели, отличающееся тем, что с целью повышения точности измерения усилий и моментов, шарнирный узел содержит вилку, связанную с лонжероном модели поперечной осью и со стойкой, посредством тензометрированных упругих элементов, четырех тонких лент, расположенных сзади оси шарнира параллельно оси аэродинамической трубы, четырех стержней, расположенных параллельно поперечной оси трубы на боковой поверхности вилки и пластины, расположенной в вертикальной плоскости, проходящей через ось шарнира.

