Настоящее предлагаемое изобретение относится к области экспериментальных исследований вопросов аэроупругости (управляемости, устойчивости), проводимых в аэродинамических трубах на упруго-подобных моделях самолетов и ракет в условиях, близких к условиям их свободного полета.
Целью настоящего предлагаемого изобретения является упрощение известного способа определения характеристик продольной управляемости и устойчивости и повышение точности необходимых при этом измерений. Поставленная цель достигается тем, что модель закрепляют в одной точке, впереди аэродинамического фокуса, например, в центре тяжести модели (в ряде случаев это желательно), к шарнирному узлу, обеспечивающему модели единственную степень свободы - поворот в плоскости тангажа. При заданной скорости потока медленно отклоняют дистанционно управляемый руль высоты модели  (при плавном отклонении руля на модель не действуют инерционные нагрузки, а только аэродинамические силы и распределенные подобно натурным силы веса модели), и регистрируют в зависимости от времени τ изменение углов атаки модели α, отклонения руля высоты δ, подъемной силы Y, а также, если это желательно, мгновенного распределения давления
(при плавном отклонении руля на модель не действуют инерционные нагрузки, а только аэродинамические силы и распределенные подобно натурным силы веса модели), и регистрируют в зависимости от времени τ изменение углов атаки модели α, отклонения руля высоты δ, подъемной силы Y, а также, если это желательно, мгновенного распределения давления  .
.
По этим зависимостям определяют затем соответствующие моменту, когда подъемная сила становится равной весу модели, параметры свободно летящей таким образом модели.
Сущность предлагаемого изобретения поясняется возможной схемой его реализации на чертеже.
Шарнир 1 модели 2, ось которого выполняют перпендикулярной плоскости симметрии модели и расположенной впереди фокуса, например, в центре тяжести модели, с помощью жесткого элемента 3 устанавливают неподвижно относительно стенок и пола трубы 4. Свободно деформирующаяся упругоподобная модель имеет, таким образом, только одну степень свободы (поворот вокруг оси шарнира 1 с возможностью изменения угла атаки α).
Тем не менее, в определенных условиях (при указанном положении оси шарнира и определенном сочетании α и δ) полет модели будет устойчивым (как показывают расчеты и опыт) и свободным. Для достижения этих условий при заданной скорости потока плавно отклоняют дистанционно управляемые рули высоты модели 5. При этом также плавно меняются такие интересующие нас параметры, как угол атаки α, подъемная сила Y, которые фиксируют с помощью регистрирующей аппаратуры. Операцию повторяют при последовательном ряде значений скорости потока. Причем, диапазон изменения δ, заранее примерно определяемый расчетом, с изменением скорости (числа М потока) может несколько меняться. Зафиксировав изменение величин α, δ, Y по времени, определяют затем момент (и соответствующие этому моменту параметры α, δ, Y, распределение давления ), когда подъемная сила Y становится равной весу модели G. Именно в этот момент модель ″свободно″ летает, и шарнир 1 воспринимает только лобовую силу.
Наличие одной лишь степени свободы у модели, не исключающее, таким образом, возможность в такой же степени свободного полета, как при использовании известного способа подвески модели, делает предлагаемый способ и более простым, и более точным для наших задач. В частности, вся электрическая проводка от датчиков модели может быть пропущена с существенно меньшим искажением свободного движения модели через шарнир 1.
Угол атаки α модели может измеряться непосредственно датчиком угла поворота модели вокруг оси шарнира; ошибка измерений при этом, как показывают расчеты, может быть уменьшена на 15÷20%. Отсутствуют также искажения в обтекании модели, обусловленные наличием в носовой части модели элемента типа направляющей, воспринимающей силу лобового сопротивления модели.
Изобретение относится к области экспериментальных исследований вопросов аэроупругости (управляемости, устойчивости), проводимых в аэродинамических трубах на упруго-подобных моделях самолетов и ракет в условиях, близких к условиям их свободного полета. Сущность: способ основан на использовании динамически подобных моделей. При этом узел подвески модели располагают впереди аэродинамического фокуса. Плавно отклоняют руль высоты модели и одновременно регистрируют угол отклонения руля, угол атаки, подъемную силу и мгновенное распределение давления. Затем, указанные величины угла атаки, угла отклонения руля высоты, мгновенное распределение давления определяют в момент, когда подъемная сила модели равна ее весу. Данные величины характеризуют параметры продольной управляемости и устойчивости свободно плавающей в этот момент модели. Технический результат: повышение точности и упрощение эксперимента. 1 ил.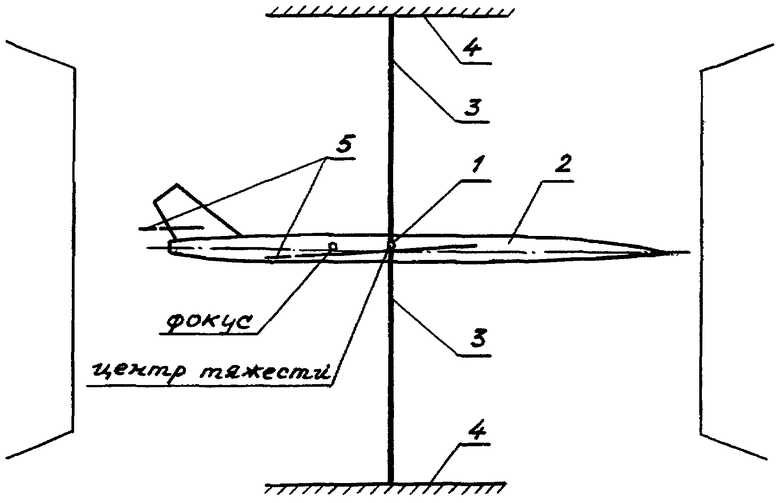
Способ определения характеристик продольной управляемости и устойчивости летательных аппаратов, основанный на использовании динамически подобных моделей, отличающийся тем, что, с целью повышения точности и упрощения эксперимента, узел подвески модели, обеспечивающий ей единственную степень свободы - поворот в плоскости тангажа, располагают впереди аэродинамического фокуса, например, в центре тяжести, плавно отклоняют руль высоты модели и одновременно регистрируют угол отклонения руля, угол атаки, подъемную силу и мгновенное распределение давления, после чего определяют соответствующие моменту, когда подъемная сила модели равна ее весу, указанные величины угла атаки, угла отклонения руля высоты, мгновенное распределение давления, характеризующие параметры продольной управляемости и устойчивости свободно плавающей в тот момент модели.

