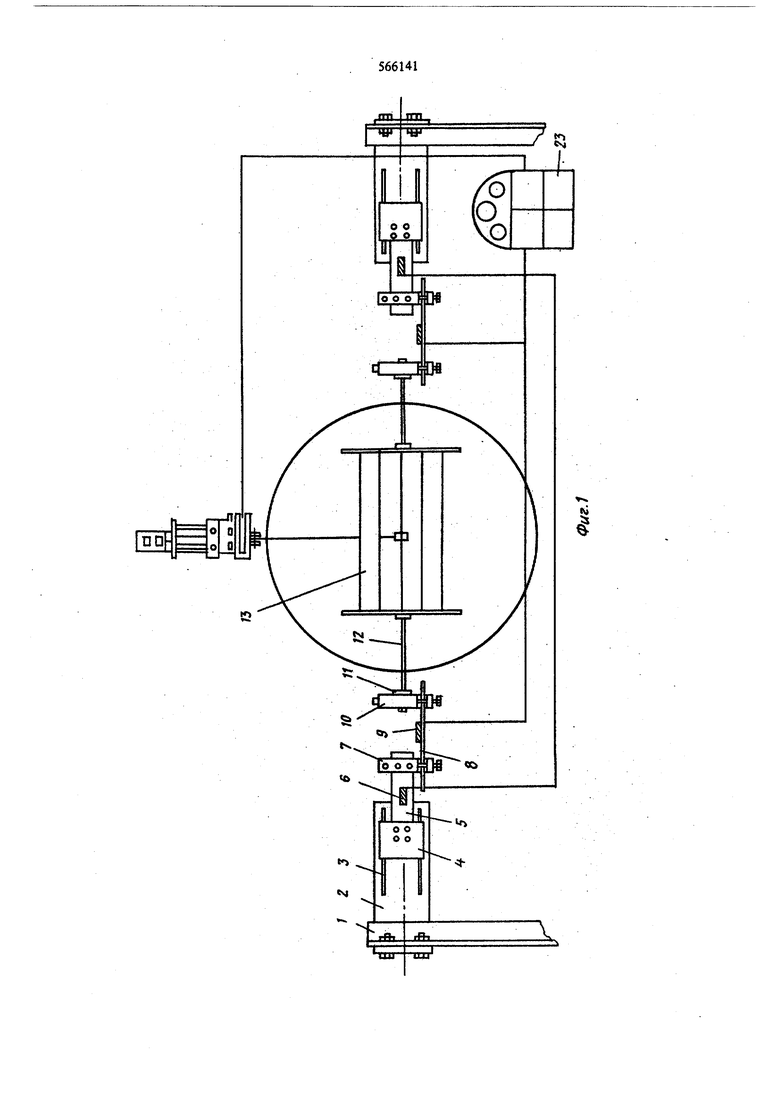
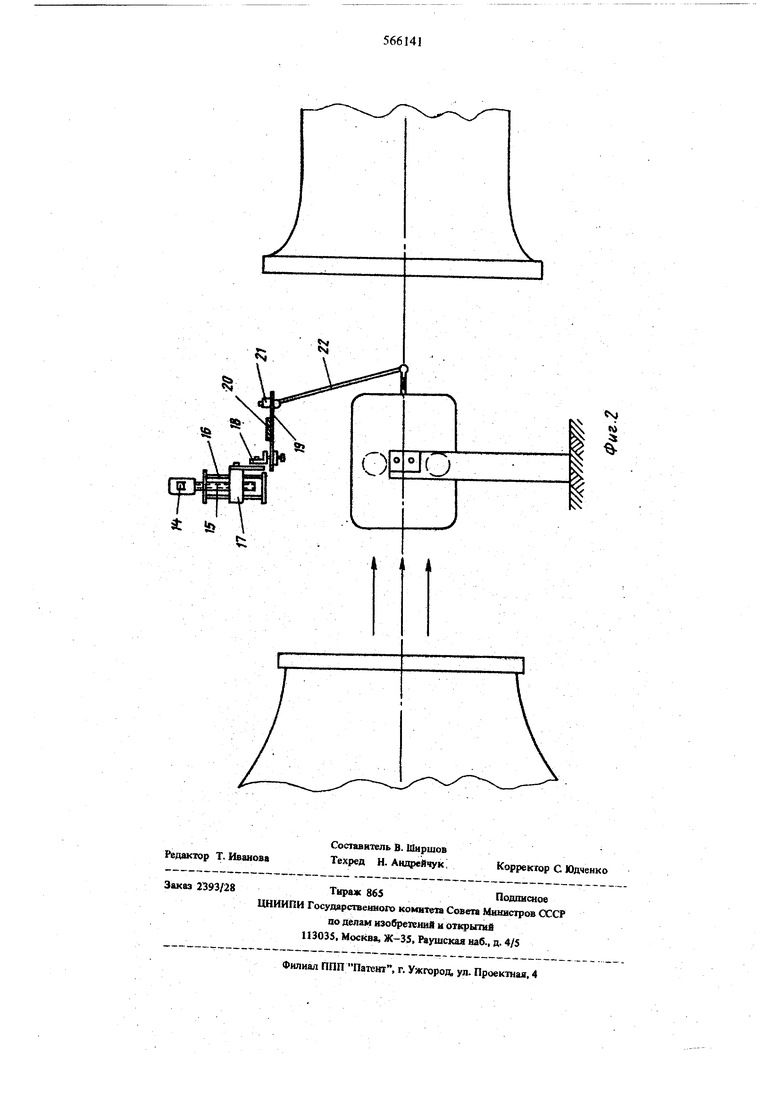
(54) АЭРОДИНАМИЧЕСКИЕ ТЕНЗОМБТРИЧЕСКИЕ ВЕСЫ ны 5, на середину которой наклоняется тензодатчмк 6, замеряюшиЁ горизонтальную составляющую полной аэродинамической силы (лобовое сопротивление тела). Друтоа конец пластины закреплен в вертакальнон прорези (на чертеже не показана) среднего болтового зажима 7, в горизонтальных прорезях которого смонтирован один конец упругой пласгины 8 с тензодатчиком 9, замеряющим вертикальную составляющую полной аэродинамической силы, (подъемную силу), а другой конец пластины смонтирован в горизонтальных прорезях (на чертеже не показаны) опорного зажима 10. В круглые отверстия зажима 10 крепится втулка И, в которую свободно вставляяется ось 12 модели 13. Второй упругий элемент вьшолнен аналогично. Механизм изменения угла атаки испытуемого тела (см. фиг. 2) состоит из электродвигателя 14, связанного с ходовым винтом 15, направляющих стержней 16, по которым скользит гайка 17. К гайке 17 прикреплен кронштейн 18, в горизонтальных прорезях которого болтами закреплен один конец упругой пластины 19 с тензодатчиком 20, воспринимающим момент тангажа. Другой конец пластины 19 крепится болтами в горизонтальных прорезях зажима 2, к которому шарнирно закреплен один конец профилированной тяги 22, другой конец которой также ширнирно соединен с моделью, 13. Кронштейн 18, упругая пластина 19 с тензодатЯ1КОМ 20 и зажим 21 образуют одностепенный упpjrnrii элемент. Все тензодатгшки двухстепе1шьк и одностепенных упругих элементов соединены по мостовой схеме и соединены с тензостанцией 23. Аэродинамические весы работают следующим образом. Перед экспериментом, в зависимости от ожидаемых сил и момента, которые определяют из опыта или путем предварительных расчетов, подбирают по толщине упругие пластины 5, 8 и 19 и устанавливают- их рабочую базу, т.е. расстояние между болтовыми соединениями, путем закреплеНИЛ концов пластин в болтовых зажимах 4, 7, 10, 21 и кронштейне 18. Рабочая база пластин может изменяться в пределах от длины наклеенного тензодатчика до полной длины пластин с учетом толщины болтовых зажимов. Расстояние между опорными зажимами 10, расположенными справа и слева от модели 13, всегда устанавливается неизменным за счет возможности перемещения зажимов 4 в пазах 3 кронштейнов 2 и их закрепления болтами, После сборки упругих элементов весы тарируют. После включения аэродинамической трубы в аботу на модель 13 набегает потоквоздуха и на ей возникает аэродинамическая сила, которая через оси 12 и тягу 22 передается на двухстепешиле и одностепенный упругие элементы. Вертикально расположенные упругие пластины 5 и тензодатчики 6 воспринимают горизонтальую составляющую полной аэродинамической силы, (силу лобового сопротивления тела). Горизонтально расположенные упругие пластины 8 и тензодатчики 9 воспринимают вертикальную составляющую полной аэродинамической силы (подъемную силу). Горизонтально располоя енная пластина 19 и тензодатчик 20 воспринимают момент тангажа. Для изменения угла ата1си включают электродвигатель 14, который вращает винт 15 и передвигает гайку 17 по направляющим стержням 16. Вместе с гайкой 17 перемещается пластина 19 и через тягу 22 поворачивает тело на необходимый угол. Упругие деформации регистрируются тензостанцией 23. Формула изобретени я 1.Аэродинамические тензометрические весы, содержащие стойки, упругие элементы с тензодатчиками, механизм изменения угла атаки модели с приводом и измерительно-регистрирующие приборы, отличающиеся тем, что, с целью повышения юс чувствительности и расщирения диапазона измерений, в них упругие элементы вьшолнены в виде закрепленных к стойкам двух одинаковых консолей, расположенных симметрично относительно модели и состоящих из пластин, развернутых относительно друг друга на угол 90° и последовательно связанных между собой жесткими разъемными соединениями. 2.Весы по п. 1, отличающиеся тем, что механизм изменения угла атаки вьшолнен в виде ходового винта с гайкой и упругой пластины, связанной одним свсшм концом посредством тяги с моделью, а другим концом соеданенной с гайкой ходового винта. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство N 230453, кл. G 01 G 3/14, 1967. 2.Авторское свидетельство N 231856, кл. G 01 G 9/00, 1966. 3.Горлин С. М. и др. Аэродинамические измерения. Методы и приборы, М., 1964, с.,463.
fe
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокомпонентные тензометрические весы | 1975 |
|
SU531036A2 |
| Многокомпонентные тензометрические весы | 1981 |
|
SU994924A2 |
| Многокомпонентные тензометрические весы | 1987 |
|
SU1448212A2 |
| УСТРОЙСТВО ДЛЯ СКОРОСТНОГО СПУСКА С ГОР С АЭРОДИНАМИЧЕСКИМ УПРАВЛЕНИЕМ | 1999 |
|
RU2152885C1 |
| УСТРОЙСТВО ДЛЯ ПОДВЕСКИ ПОЛЫХ УПРУГО-ДИНАМИЧЕСКИ-ПОДОБНЫХ МОДЕЛЕЙ КРЫЛАТЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКИХ ТРУБАХ | 1972 |
|
SU1840314A1 |
| Комбинированная динамически-подобная аэродинамическая модель для разных видов аэродинамических испытаний | 2023 |
|
RU2808290C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2509033C1 |
| Способ исследования и оптимизации компоновки летательного аппарата и модель для его осуществления | 2020 |
|
RU2761543C1 |
| ЛЕГКИЙ САМОЛЕТ | 1991 |
|
RU2007333C1 |
| Аэродинамические весы | 1981 |
|
SU1015260A1 |