Изобретение относится к гидроакустической технике, а более конкретно - к гидроакустическим устройствам измерения и контроля шумоизлучения кораблей.
Известны устройства подавления помех (см., например, М.Скольник. Введение в технику радиолокационных систем. М.: Мир, 1965, с.661), работающее на принципе уменьшения смещенности оценок сигнала путем вычитания выходного напряжения приемника из выходного напряжения вспомогательного приемника в видеотракте перед детектором. Однако указанные устройства подавления (компенсации) помех имеют большую флюктуационную составляющую и для гидроакустической практики не пригодны.
Существенно более высокой помехозащищенностью, а, следовательно, и более полезным устройством с точки зрения использования для измерения шумоизлучения корабля является тракт шумопеленгаторной станции с буксируемой антенной.
В трактах ГАС система первичной обработки сигналов обеспечивает прием шумоизлучения кораблей с высокой пространственной избирательностью и помехозащищенностью, усиление и трансляцию сформированных электрических сигналов, а также выполнение операций быстрого преобразования Фурье (БПФ) для выработки данных об энергетической спектральной плотности шумоизлучения. Системы вторичной обработки сигналов в ГАС решают задачи обнаружения и пеленгования целей - шумящих объектов, в частности кораблей.
Наиболее близким по техническому решению к предлагаемому устройству является устройство для измерения подводного шумоизлучения надводных и подводных кораблей, используемое в качестве прототипа.
Устройство - прототип содержит канал излучения, выполненный в виде последовательно соединенных генератора электрических сигналов, усилителя мощности и излучателя, а также канал подстройки излучающего сигнала в виде последовательно соединенных гидрофона, спектроанализатора, долговременного запоминающего устройства (ДЗУ), блока сравнения, выход которого соединен со вторым входом мощного усилителя. Канал приема в устройстве - прототипе выполнен в виде последовательно соединенных приемной гидроакустической антенны, спектроанализатора, переключателя, блока перемножения и регистратора, а также двух ДЗУ, выходы которых соединены с входами блока деления, выход которого соединен со вторым входом блока перемножения.
Устройство - прототип обеспечивает определение спектральной плотности шумоизлучения корабля Gx(ω) в результате сопоставления со спектральной плотностью тестового сигнала Go(ω), приведенного к единичному расстоянию по алгоритму
где  - спектральная плотность шумоизлучения корабля, зарегистрированная на выходе приемной антенны,
- спектральная плотность шумоизлучения корабля, зарегистрированная на выходе приемной антенны,
 - спектральная плотность сигнала, образованного каналом излучения, зарегистрированная на выходе приемной антенны.
- спектральная плотность сигнала, образованного каналом излучения, зарегистрированная на выходе приемной антенны.
Устройство - прототип обеспечивает повышение точности измерения подводного шумоизлучения корабля. Однако это устройство предназначено для работы только в условиях, когда скрытность при измерениях не обязательна и представляется возможным создавать тестовый сигнал столь большой интенсивности, что  . Для измерения подводного шумоизлучения в процессе эксплуатации ПЛ, это устройство не пригодно, поскольку тестовый сигнал большой интенсивности демаскирует корабль.
. Для измерения подводного шумоизлучения в процессе эксплуатации ПЛ, это устройство не пригодно, поскольку тестовый сигнал большой интенсивности демаскирует корабль.
Целью настоящего изобретения является измерение подводного шумоизлучения корабля в процессе эксплуатации.
Указанная цель достигается тем, что тестовый сигнал Go(ω) имеет относительно малую интенсивность по сравнению с шумоизлучением корабля , т.е.  , благодаря использованию буксируемой антенны штатной станции шумопеленгования с высокой помехозащищенностью и обеспечиваемой ею возможности снижения смещенности оценки спектральной плотности шумоизлучения.
, благодаря использованию буксируемой антенны штатной станции шумопеленгования с высокой помехозащищенностью и обеспечиваемой ею возможности снижения смещенности оценки спектральной плотности шумоизлучения.
Смещенность оценки спектральной плотности шумоизлучения обусловлена двумя причинами: во-первых, шумоизлучением корабля, и во-вторых, помехами на буксируемой антенне. Теоретический анализ показывает, что алгоритм работы устройства должен иметь вид

где  - спектральная плотность (на выходе антенны) смеси шумоизлучения корабля и собственных помех на антенне, при ориентации Д.Н. антенны на корабль-носитель;
- спектральная плотность (на выходе антенны) смеси шумоизлучения корабля и собственных помех на антенне, при ориентации Д.Н. антенны на корабль-носитель;
G∑n(ω) - спектральная плотность собственных помех на антенне, при ориентации Д.Н. антенны в противоположном направлении;
 - спектральная плотность (на выходе антенны) смеси тестового сигнала и шумоизлучения корабля.
- спектральная плотность (на выходе антенны) смеси тестового сигнала и шумоизлучения корабля.
Использование канала приема с буксируемой антенной вызывает необходимость принятия мер для снижения флюктуационной погрешности, обусловленной прохождением сигнала через кильватерную струю. При этом несколько взаимное расположение корабля и буксируемой антенны неизменно, представляется необходимым и возможным ввести в устройство накапливающий сумматор по реализациям Gx(ω). Необходимо ввести и анализатор случайной погрешности.
Как уже упоминалось, особенностью устройства является малая мощность (интенсивность) излучаемого тестового сигнала. В связи в этим отпадает необходимость в канале подстройки излучаемого тестового сигнала.
Таким образом, предлагаемое устройство измерения шумоизлучения корабля содержит канал излучения, выполненный в виде последовательно соединенных генератора электрических сигналов, усилителя мощности и излучателя, и канал приема, содержащий последовательно соединенные приемную гидроакустическую антенну с формирователем направленности, спектроанализатор, блок снижения смещенности оценки за счет помех, второй вход которого соединен со вторым выходом формирователя направленности, переключатель, блок перемножения, накапливающий сумматор и регистратор, а также параллельно соединенные первое и третье долговременные запоминающие устройства (ДЗУ), входы которых соединены со вторым и третьим выходами переключателя, а выходы с первым и вторыми входами блоков вычитания, причем вычитатель последовательно соединен с блоком деления, выход которого соединен со вторым входом блока перемножения, второе ДЗУ, выход которого соединен со вторым входом блока деления, и анализатор погрешности, первый и второй входы которого соединены с входом и выходом накапливающего сумматора соответственно, а выход - со вторым входом регистратора.
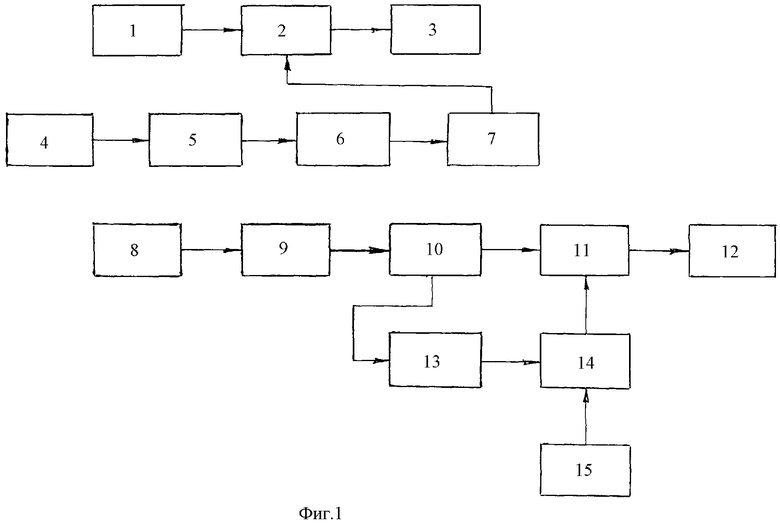
На фиг.1 приведена блок-схема устройства прототипа. Здесь: 1 - генератор, 2 - усилитель мощности, 3 - излучатель, 4 - гидрофон, 5 - второй спектроанализатор, 6 - четвертое ДЗУ, 7 - блок сравнения, 8 - приемная гидроакустическая антенна с формирователем направленности, 9 - первый спектороанализатор, 10 - переключатель, 11 - блок перемножения, 12 - регистратор, 13 - первое ДЗУ, 14 - блок деления, 15 - второе ДЗУ.
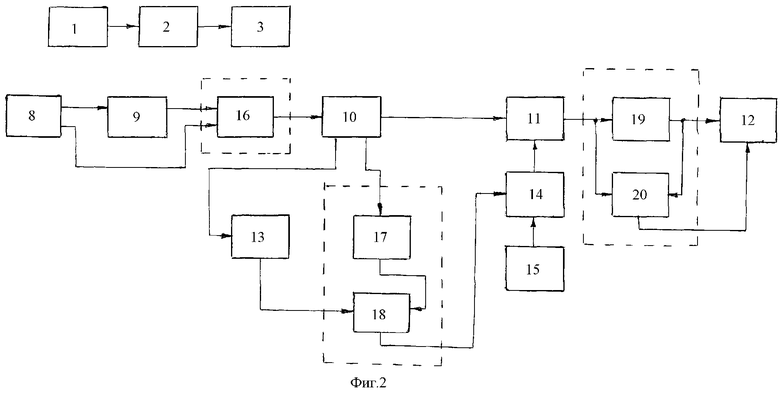
На фиг.2 приведена блок-схема предлагаемого устройства. В него введены: 16 - схема снижения смещенности оценки обусловленной помехами, 17 - третье ДЗУ, 18 - вычитатель, 19 - накапливающий сумматор, 20 - анализатор погрешности (введенные блоки обведены пунктирными линиями).
На фиг.3 схематически изображено расположение излучателя и приемной гидроакустической антенны на подводной лодке (ПЛ). Здесь: 21 - ПЛ, 22 - боевая рубка ПЛ, 23 - кабель-трос.
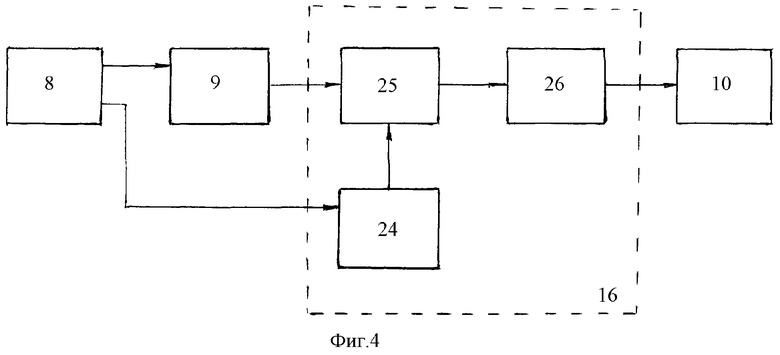
На фиг.4 приведена блок-схема снижения смещенности оценки за счет помех. Здесь: 24 - спектроанализатор схемы снижения смещенности оценки, 25 - вычитатель, 26 - осредитель.
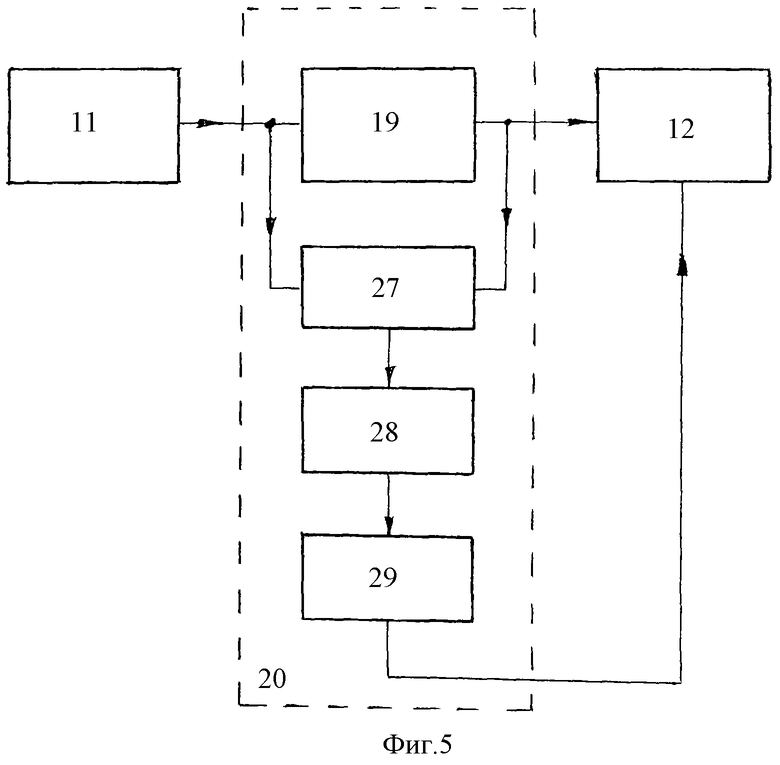
На фиг.5 приведена блок-схема анализатора погрешности. Здесь: 27 - вычитатель, 28 - квадратор, 29 - накапливающий сумматор анализатора погрешности.
Канал излучения тестового сигнала включает в себя генератор 1, усилитель мощности 2 и излучатель 3. Этот канал размещается на корабле, причем, как правило, излучатель 3 размещается в кормовой оконечности рубки 22 ПЛ 21.
Канал приема включает в себя приемную антенну 8 (как правило, это протяженная антенна 8, буксируемая за ПЛ 21 с помощью кабель-троса 23), спектроанализатор 9, схему снижения смещенности оценки 16, переключатель 10, ДЗУ 13, 15 и 17, вычитатель 18, блок перемножения 11, блок деления 14, накапливающий сумматор 19, анализатор погрешности 20 и регистратор 12. Схема соединений приведена ранее.
Работа устройства осуществляется следующим образом. До начала измерений выполняется градуировка канала излучения, т.е. определяется его чувствительность в режиме излучения. Эту градуировку выполняют метрологические службы ВМФ. В процессе эксплуатации с помощью канала излучения создается тестовый сигнал в среде, с известной по данным градуировки спектральной плотностью, приведенной к единичному расстоянию, Go(ω), данные о которой записаны в ДЗУ 15. Тестовый сигнал принимается приемной антенной 8, формирующей по крайней мере два пространственных канала, один из которых характеристикой направленности нацелен на корабль. На выходе спектроанализатора 9 наблюдается спектральная плотность

обусловленная смесью тестового сигнала, шумоизлучения корабля и помехами на буксируемой антенне. После обработки в схеме снижения смещенности оценок за счет помех 16

Этот спектр с помощью переключателя 10 подается на ДЗУ 13, где фиксируется (запоминается). После этого канал излучения выключается, а переключатель 10 переводится на второе положение, при этом в ДЗУ 17 заносится значение спектра шумоизлучения корабля, "очищенное" от постоянной составляющей помех, т.е.  .После вычитателя 18 и делителя 14, с использованием данных ДЗУ 15 о спектре Go(ω) формируется отношение
.После вычитателя 18 и делителя 14, с использованием данных ДЗУ 15 о спектре Go(ω) формируется отношение
Затем переключатель 10 ставиться в третье положение; с помощью блока перемножения 11 формируются реализации

Накапливающий сумматор 19 определяет усредненный спектр по ансамблю n реализации, т.е.
Данные о  подаются на регистратор 12.
подаются на регистратор 12.
Схема снижения смещенности оценки за счет помех 16 может быть выполнена по блок-схеме фиг.4. В нее введены последовательно соединенные вычитатель 25, вход которого соединен с выходом спектроанализатора 9, осреднитель 26, выход которого соединен с выходом переключателя 10, а также спектроанализатор 24 в этой схеме, вход которого соединен со вторым выходом приемной антенны с формирователем направленности 9, а выход со вторым входом вычитателя 25.
Работа схемы 16 осуществляется следующим образом. Приемная антенна с формирователем направленности 8 образует две характеристики направленности, одна из которых "нацелена" на корабль, а вторая отвернута от нее на 180°. На выходе вычитателя 25 образуется разность спектра с первого анализатора

и спектра со второго анализатора
где индексами 1 и 2 сверху у G∑n(ω) обозначены помехи по первому и второму пространственным каналам. Сигнал не корректирован с помехами. Вычитаемые помехи могут оказаться коррелированными. Действительно, если характеристики направленности повернуты друг относительно друга на угол Δ, то на выходе вычитателя 25

где  - энергетическая спектральная плотность помех по первому пространственному каналу,
- энергетическая спектральная плотность помех по первому пространственному каналу,
 - энергетическая спектральная плотность помех по второму пространственному каналу,
- энергетическая спектральная плотность помех по второму пространственному каналу,
 - взаимная спектральная плотность помех первого и второго канала.
- взаимная спектральная плотность помех первого и второго канала.
Символом Re обозначена действительная часть взаимного спектра (коспектр). Пренебрегая зависимостью коэффициента концентрации K(ω) антенны от угла компенсации (ниже будет видно, почему это можно сделать) и определяя  , а также учитывая, что
, а также учитывая, что

можно записать

где Gn(ω) - спектральная плотность в изотропном поле помех, измеренная точечным гидрофоном,
γ(jω) - частотная характеристика чувствительности,
С - скорость звука,
lC - длина антенны.
Из формулы (12) видно, что угол Δ необходимо выбрать Δ=180°. Тогда  для всех ω рабочего диапазона частот. При этом коэффициенты концентрации по обеим каналам будут равны. Таким образом, на выходе вычитателя будет наблюдаться только спектр сигнала
для всех ω рабочего диапазона частот. При этом коэффициенты концентрации по обеим каналам будут равны. Таким образом, на выходе вычитателя будет наблюдаться только спектр сигнала  либо (при включенном канале излучения)
либо (при включенном канале излучения)  и, следовательно, смещенность оценки за счет помех будет исключена. Сигнал с вычитателя 25 подается на блок 10.
и, следовательно, смещенность оценки за счет помех будет исключена. Сигнал с вычитателя 25 подается на блок 10.
Анализатор погрешности 20 может быть выполнен по блок-схеме, приведенной на фиг.5. Анализатор погрешности 20 содержит последовательно соединенные вычитатель 27, первый и второй входы которого соединены с входом и выходом накапливающего сумматора 19 соответственно, квадратор 28 и накапливающий сумматор в анализаторе погрешности 29, выход которого соединен со вторым входом регистратора.
Работа анализатора погрешности 20 осуществляется следующим образом. На выходе вычитателя 27 формируется разность

После квадратора 28

После накапливающего сумматора в анализаторе погрешности (29) образуется дисперсия за счет случайной погрешности

Эти данные подаются на регистратор 12.
Практическое исполнение блоков, входящих в предлагаемое устройство известно из практики создания средств гидроакустического вооружения ВМФ.
Устройство - прототип еще находится в стадии разработки.
Техническая эффективность устройства заключается в обеспечении принципиально новой возможности осуществления измерения подводного шумоизлучения корабля в процессе его эксплуатации с использованием технических средств этого же корабля: канала излучения и канала приема с буксируемой антенной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1986 |
|
SU1840507A1 |
| СПОСОБ ИЗМЕРЕНИЯ СОБСТВЕННОГО ПОДВОДНОГО ШУМОИЗЛУЧЕНИЯ И ШУМОИЗМЕРИТЕЛЬ | 1989 |
|
SU1840603A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОДВОДНОГО ШУМОИЗЛУЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ КОРАБЛЕЙ | 1980 |
|
SU1840358A1 |
| ШУМОПЕЛЕНГАТОРНАЯ СТАНЦИЯ | 1988 |
|
SU1840459A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОДВОДНОЙ ШУМНОСТИ КОРАБЛЯ-ЦЕЛИ | 1989 |
|
SU1840512A1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| СПОСОБ НАПРАВЛЕННОГО ПРИЕМА ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1990 |
|
SU1840431A1 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО ГЕОФИЗИЧЕСКОГО СУДНА | 2010 |
|
RU2424538C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| ПРИЕМНЫЙ ТРАКТ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ С ЛИНЕЙНОЙ АНТЕННОЙ, УСТРАНЯЮЩИЙ НЕОДНОЗНАЧНОСТЬ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА СИГНАЛА | 2000 |
|
RU2190237C2 |

Изобретение относится к гидроакустической технике, а более конкретно - к гидроакустическим устройствам измерения и контроля шумоизлучения кораблей. Сущность: устройство содержит блок шумоизлучения и приемник акустических сигналов. При этом приемник акустических сигналов выполнен в виде последовательно связанных гидроакустической антенны, анализатора спектра, переключателя, блока перемножения, регистратора, первого долговременного запоминающего узла (ДЗУ) и блока деления. Причем ДЗУ и блок деления включены между переключателем и блоком перемножения, а к блоку деления подключен второй ДЗУ. Кроме того, между анализатором спектра и переключателем включен блок смещения оценки. Между первым ДЗУ, переключателем и блоком деления включены последовательно связанные третий ДЗУ и блок вычитания. Между блоком перемножения и регистратором включены параллельно связанные сумматор и анализатор погрешности. При этом блок смещения может быть выполнен в виде последовательно связанных спектроанализатора, вычитателя и осреднителя. Кроме того, анализатор погрешности может быть выполнен в виде последовательно связанных вычитателя, квадратора и накапливающего сумматора. Технический результат: повышение помехозащищенности измерения при низком уровне шумоизлучения. 5 ил.