Изобретение относится к гидроакустическим измерениям, а конкретнее, к способам и средствам измерения подводной шумности кораблей.
Известен способ-аналог измерения подводного шумоизлучения корабля-цели с использованием гибких протяженных буксируемых антенн (ГПБА), буксируемых следящей ПЛ (см., например, Naval Forces, 1981, 3, №5, 64-69 с; Defence, 1983, 14, V, №5, 64-65 с; Maritime Defence, 1983, 8, IV, №4, с.139-142), содержащий прием сигналов - шумов корабля-цели, определение его энергетического спектра, оценку дистанции до цели и приведение его к единичному расстоянию с учетом распространения звука в морской среде. Обзор зарубежных средств приведен в статье А.А.Гурвич, Н.М.Гусев, Г.В.Яковлев. Гидроакустические системы с гибкими протяженными буксируемыми антеннами, Л.: "Судостроение за рубежом" №10(24), 1984. Измерения подводного шумоизлучения корабля-цели производятся либо в дрейфе следящего корабля, либо в режиме бросок-дрейф, либо при буксировке с постоянной скоростью, либо при периодическом выпуске ГПБА (со скоростью, равной скорости буксировки) и быстрой ее выборке (патент США, №3659256, кл.340-7R, заявленный 25.04.1982).
Протяженность ГПБА порядка 180 м на ПЛ в системах тактического назначения (Marine Defence, 1983, 8, IV, №4, 139-142 с) и порядка 600 м в системах дальнего гидроакустического обнаружения типа SURTASS. Рабочий частотный диапазон для дизельных ПЛ стран НАТО от 50 Гц до 2500 Гц (см. упомянутую статью в Marine Defence, а также Ocean Industry, 1975, 10, V, №5, 53 с) в антеннах типа TB-16/BQ.
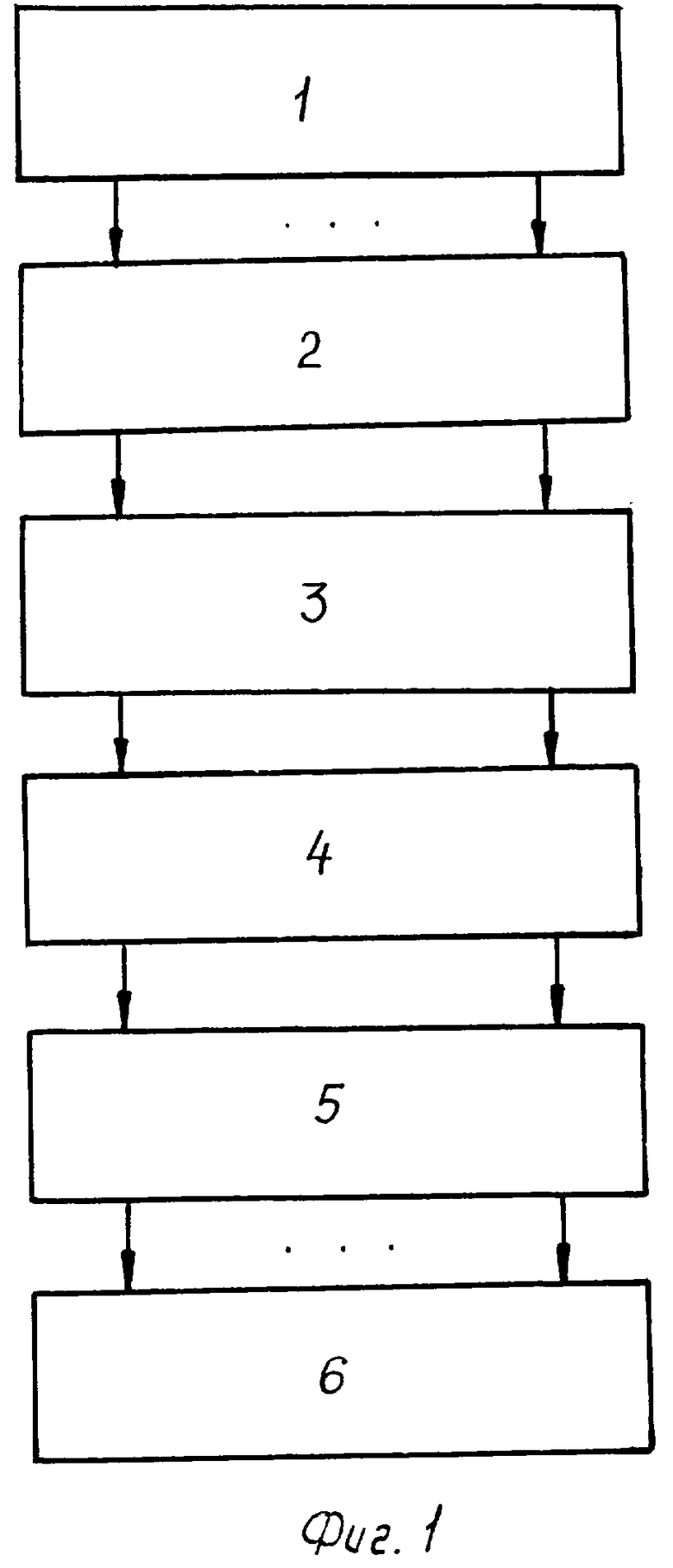
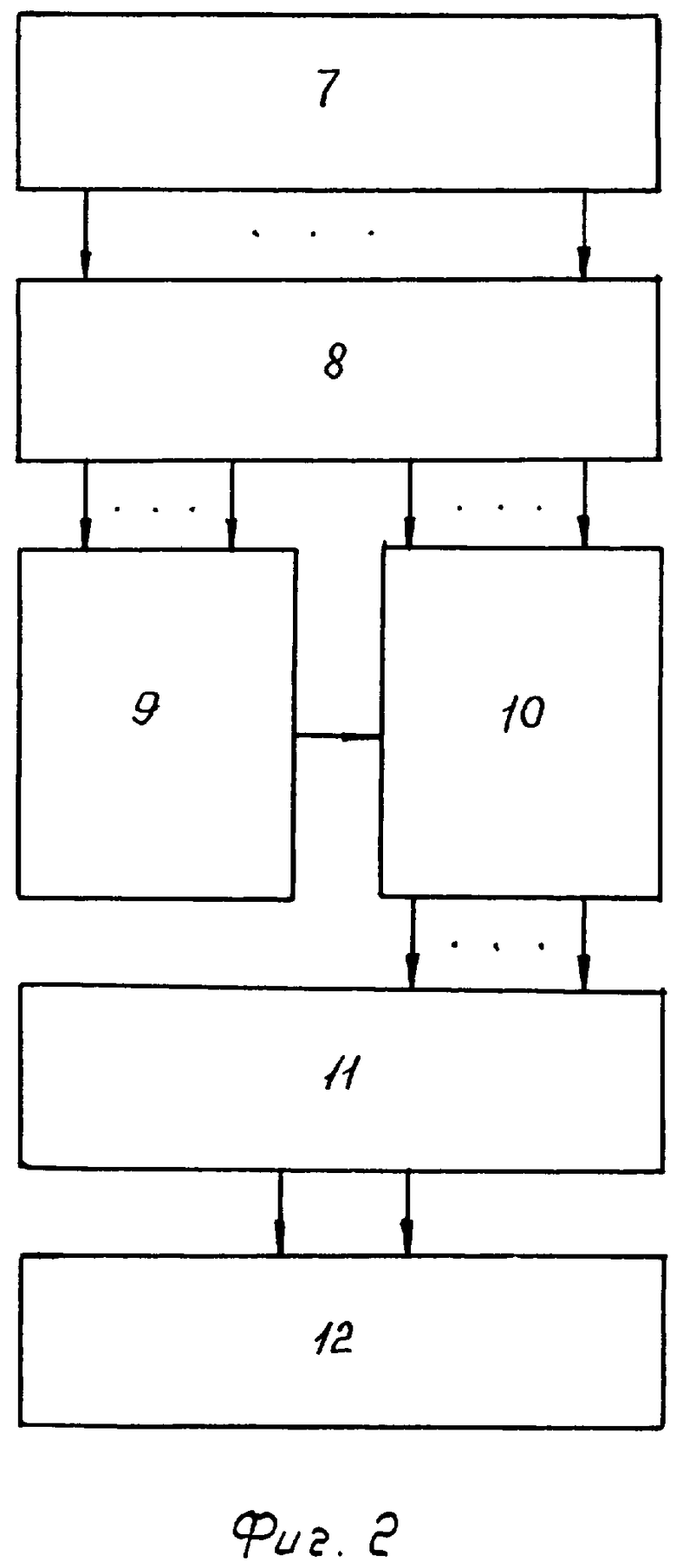
Способ-аналог реализуется с помощью устройства (JASA, 1982, 72, III, №3, 982-983 с), содержащего последовательно-параллельно соединенные ГПБА, блок предварительной обработки сигнала, блок аналого-цифровых преобразователей (АЦП), мини-ЭВМ (типа HP 2IMX-E), формирователя ХН, спектроанализатора, АСЦ и устройства магнитной записи (см. фиг.1). В береговых условиях обработка магнитофонных записей осуществляется с использованием последовательно-параллельно соединенных магнитного воспроизводящего устройства, блока калибровки сигналов, процессора обратного преобразования Фурье (ОБПФ), устройства временной обработки сигнала, блока пространственной обработки сигнала и устройства индикации и регистрации результата измерения (фиг.2).
Недостатком способа-аналога являются отсутствие возможности скрытного измерения подводного шумоизлучения корабля-цели: следящий корабль также "заметен", как и измеряемый. Кроме того, на низких частотах практически невозможно обеспечить такую пространственную избирательность, чтобы выделить только водно-водный луч. Интерференция водно-водного и водно-поверхностного лучей искажает результаты измерений, что объясняется в основном тем, что ХН ГПБА имеет воронкообразную форму (см., например, М.Д.Смарышев, Ю.Ю.Добровольский. Гидроакустические антенны. Справочник. Л.: Судостроение, 1984, 63 с), приведенную на фиг.3. Подробные сведения о других аналогах и прототипе приведены в прилагаемой справке о патентных исследованиях.
В качестве способа-прототипа используется способ измерения шумоизлучения корабля по авторскому свидетельству СССР №1840507, 2007 г. Этот способ измерения самоизлучения ПЛ заключается в том, что при движении ПЛ с заданной скоростью V на глубине H принимают сигналы ГПБА, буксируемой ПЛ, по энергетическому спектру которых судят о контролируемом параметре. Для повышения достоверности при измерении в низкочастотной области спектра принимают сигналы всенаправленными приемниками антенны в N точках, расположенных на прямой по трассе движения ПЛ заданной длины Lo на заданном расстоянии Dо первой точки от центра ПЛ, шумоизлучение определяют по среднему значению измеренных спектров, а длину Lo, расстояние Dо первой точки измерения и количество точек измерений выбирают из соотношений

где С - скорость звука в среде,
Hмин - минимальная глубина ПЛ при измерении;
fн, fв - нижняя и верхняя частоты диапазона измерений, соответственно.
Недостатками способа-прототипа являются недостаточная достоверность измерений из-за интерференционных явлений. Этот способ не обеспечивает скрытности измерений.
Используемая для реализации способа-прототипа ГПБА подробно описана в журнале Geophysics, 1974, 39, VI, №6, 781-793 с, а также в упоминавшейся ранее статье А.А.Гурвич, Н.М.Гусев, Г.В.Яковлев. Гидроакустические системы с гибкими протяженными буксируемыми антеннами, Судостроение за рубежом, №10, 1984. Эта антенна содержит последовательно соединенные кольцевой вращающийся токопереход, кабель-буксир, виброизолирущую секцию, систему уплотнения и передачи сигналов, шланг с акустическими приемниками и электронными блоками, заполненный жидкостью, обеспечивающий нейтральную плавучесть антенны, датчики глубины и температуры, оконечный модуль (кольцевое тело). Схематическое изображение ГПБА приведено на фиг.4.
Целью изобретения является обеспечение скрытности ПЛ при измерении подводной шумности корабля-цели, а также снижение помех от шумов моря и пространственного выделения водно-водного луча.
Поставленная цель достигается за счет того, что в известный способ, в котором прием шумовых сигналов по водно-водному и водно-поверхностному лучам на глубине Н1 в зоне акустической освещенности осуществляется с помощью тракта ГПБА, введены дополнительные операции приема с помощью основной носовой антенны при ориентации максимумов ХН в направлении водно-водного луча, фильтрации с заданной разрешающей способностью Δfзад в заданных поддиапазонах частот, осреднение сигнала, определение энергетического спектра шумоизлучения с учетом данных о чувствительности приемного тракта и дистанции до корабля-цели.
Далее ПЛ зависает, ГПБА из горизонтального положения переводится в вертикальное, производится автосопровождение цели двумя антеннами, после чего ПЛ погружается под слой скачка на глубину H2, вытравливая антенну таким образом, чтобы она осталась в зоне освещенности (фиг.5). Определяют угол αо между водно-водным и водно-поверхностным лучами, наводя на них максимум ХН антенны с помощью двух трактов АСЦ или, что более точно отражает существо дела, с помощью двух трактов автоматического сопровождения лучей (АСЛ). Прием осуществляется с помощью активной части антенны с электроакустическими приемниками на вертикальной длине d, выбираемой из неравенства

где λ - длина звуковой волны в среде,
αо - угол между водно-водным и водно-поверхностным лучами в градусах,
Hо - вертикальная протяженность зоны акустической освещенности, располагаемая выше слоя скачка,
причем измерения осуществляют в диапазоне углов α в вертикальной плоскости, ограниченных неравенством
 (4)
(4)
где Со, СП, СД - скорости звука, соответственно, на горизонте фазового центра активной части антенны, у поверхности и дна моря.
Сущность изобретения заключается в том, что при приеме сигнала производится измерение подводной шумности корабля-цели с помощью вертикально-протяженной антенны при нахождении следящей ПЛ под слоем скачка, а также прием на вертикальной антенне длиной d в указанном диапазоне углов. Заявителю и авторам не известны из технической и патентной литературы совокупность подобных операций, что позволяет считать настоящее предложение отвечающим критерию "существенные отличия".
На фиг.1 приведена блок-схема измерительного тракта с ГПБА. Здесь: 1 - ГПБА, 2 - блок предварительной обработки сигнала, 3 - аналого-цифровые преобразователи, 4 - мини-ЭВМ, 5 - формирователь ХН, спектроанализатор и система АСЦ, 6 - устройство магнитной записи и индикации сигнала.
На фиг.2 приведена блок-схема обработки информации. Здесь: 7 - магнитофонное воспроизводящее устройство, 8 - блок калибровки сигналов, 9 - устройство временной обработки сигнала, 10 процессор быстрого преобразования Фурье (БПФ), 11 - блок пространственной обработки сигнала, 12 - блок индикации и регистрации результатов.
На фиг.3 приведено пояснение к направленным свойствам ГПБА. Здесь: 13 - поверхность среды, 14 - воронкообразная ХН.
На фиг.4 приведено схематическое изображение ГПБА. Здесь: 15 - вращающийся токопереход, 16 - кабель-буксир, 17 - виброизолирующая секция, 18 - система уплотнения и передачи сигналов, 19 - шланг с электроакустическими приемниками и электронными блоками, 20 - датчики глубины и температуры, 21 - концевое тело (стабилизатор, оконечное устройство).
На фиг.5 приведено пояснение к операциям предлагаемого способа. Пунктиром обозначено первоначальное положение ПЛ и ГПБА; сплошной линией - новое положение ПЛ и ГПБА в процессе измерения подводного шумоизлучения корабля-цели. Здесь: 22 - вертикальное распределение скорости звука, 23 - слой скачка, 24 - ПЛ-цель, 25 - следящая ПЛ-носитель, 26 - основная носовая приемная гидроакустическая антенна ПЛ, лебедка ГПБА.
На фиг.6 приведено пояснение к конструкции ГПБА. Здесь: 28 - оболочка в период, когда она заполнена воздухом.
На фиг.7 схематически приведено пояснение дополнительно вводимых устройств. Здесь: 29 - выпускной клапан, 30 - впускной клапан, 31 - баллон сжатого воздуха.
На фиг.8 приведена принципиальная схема односедельного клапана. Здесь: 32 - плунжер, 33 - седло, 34 - фланец, 35 - фланец, 36 - шток, 37 - уплотнение, 38 - корпус клапана, 39 - исполнительный механизм.
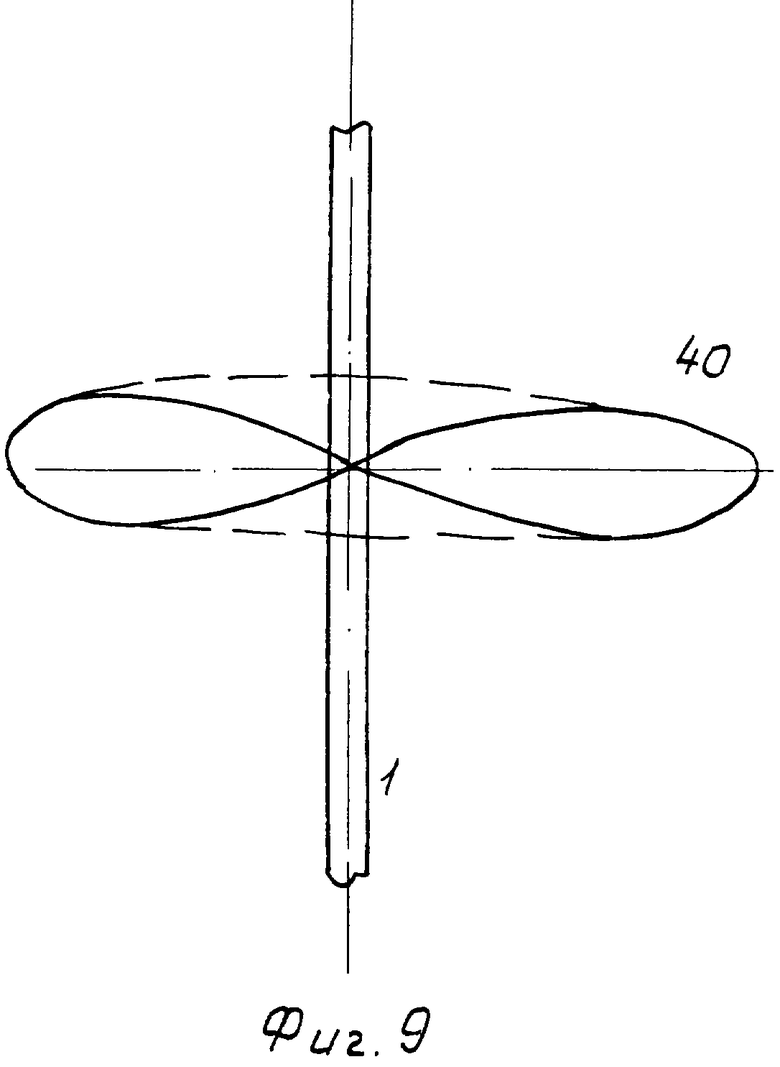
На фиг.9 приведен вид диске образной ХН 40.
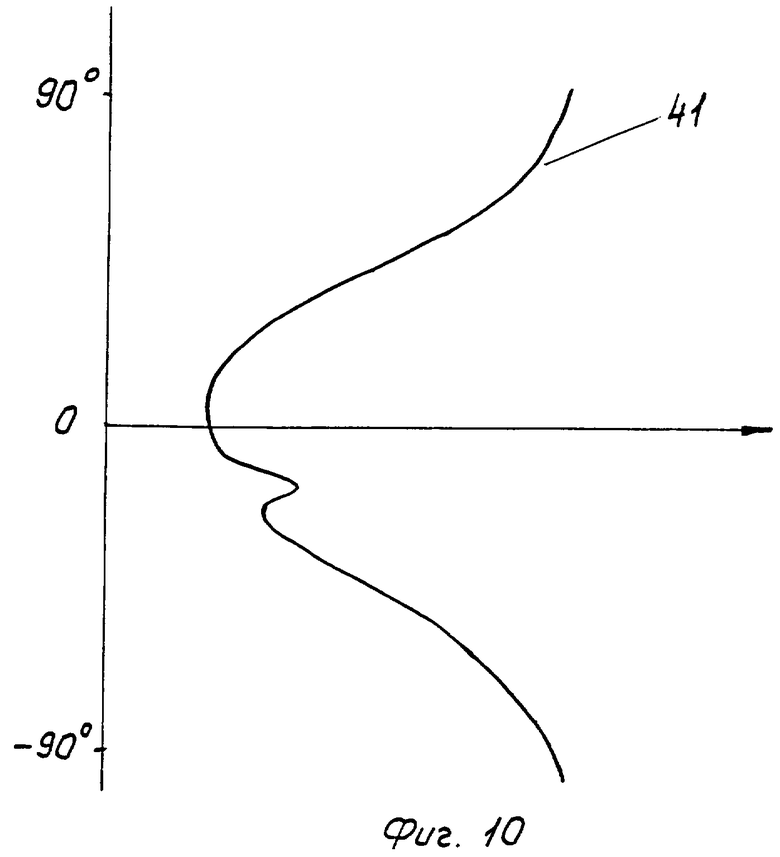
На фиг.10 приведено угловое распределение интенсивности шумов моря 41.
Необходимая для реализации способа ГПБА (фиг.5 и 6) содержит последовательно-параллельно соединенные токопереход 15, кабель-буксир 16, виброизолирующую секцию 17, систему уплотнения и передачи сигналов 18, шланг с акустическими приемниками и электронными блоками 19, датчики глубины и температуры 20, концевое тело- стабилизатор 21. В устройство введены оболочка, например, из прорезиненной ткани 28, крепящаяся к концевому телу 21 ГПБА, выпускной клапан 29, впускной клапан 30, исполнительные механизмы которых электрически соединены с пультом управления тракта ГПБА 6, баллон сжатого воздуха 31. Работа ГПБА осуществляется следующим образом. Сигналы принимаются гидроакустическими приемниками, усиливаются, отфильтровываются и уплотняются. После чего передаются по кабель-буксиру 16 на устройство фиг.1. Для перевода ГПБА 1 в вертикальное положение (фиг.5) на исполнительный механизм 39 впускного клапана (фиг.8) подается напряжение. Плунжер 32 выходит из седла 33. Сжатый воздух подается в оболочку 28 и она заполняется воздухом. За счет положительной плавучести оболочка 28 переводит ГПБА 1 в вертикальное положение. После завершения измерения подается с пульта 6 напряжение на исполнительный механизм 39 выпускного клапана 29 (на фиг.7 показаны провода для подачи напряжения). Под действием гидростатического давления оболочка 28 "схлопывается", выпуская воздух. ГПБА вновь приобретает нулевую плавучесть и после того, как ПЛ начинает движение, переходит в горизонтальное положение.
Практическое исполнение блоков, входящих в ГПБА, известно из практики гидроакустики. Подробное описание ГПБА 1 имеется в обзорной статье А.А.Гурвич, Н.М.Гусев, Г.В.Яковлев. Гидроакустические системы с гибкими протяженными буксируемыми антеннами. Л.: Судостроение за рубежом. №10(24), 1984, Электроакустические приемники выполняются из пьезокерамики. Шланг заполняется жидкостью, обеспечивающей ГПБА нулевую плавучесть. Оболочка 28 выполняется из прорезиненной ткани. Как уже говорилось ранее, на пути движения сжатого воздуха устанавливаются односедельные клапаны, принципиальная схема которых приведена на фиг.8. Клапан представляет собой изменяемое пневматическое сопротивление с переменной площадью проходного сечения от нуля при посадке плунжера 32 в седло 33 до максимума при полностью открытом клапане. Клапаны имеют электрическое управление, которое приводит в действие исполнительный механизм соленоидного типа, открывающий и закрывающий клапаны. Таким образом, используются клапаны с релейной характеристикой, т.е. клапаны, открытие и закрытие которых производится скачком. Различные виды клапанов и устройства их управления описаны, например, в книгах: Б.Ф.Ступак. Элементы гидроприборов, в сборнике "Системы, устройства и элементы пневмо и гидроавтоматики", М. 1959; В.В.Ермаков. Основы расчета гидропривода. М. 1951.
Таким образом, практическое исполнение ГПБА обеспечивается путем включения в нее дополнительных блоков, известных из техники.
Приведем некоторые данные для подтверждения достигаемого эффекта.
Как известно (см., например, И.Б.Андреева. Физические основы распространения звука в океане. Л.: Гидрометеоиздат, 1975, с.21-22), в слое "скачка" наблюдается градиент скорости звука, резко отличающийся от градиента скорости звука в слоях морской воды, лежащих выше и ниже его. Обычно слой скачка размещается ниже приповерхностного перемешанного слоя и имеет температурный градиент, достигающий 0,2°/м. Вода, находящаяся всего на 30-50 м ниже приповерхностного слоя изотермии, может оказаться на 10-15° холоднее, чем в перемешанном слое. Уменьшение температуры приводит к возрастанию плотности на этих глубинах. В слое скачка резко падает и соленость, которая уменьшается на 1-1,5%. Повышенная соленость вышележащего слоя связана с испарением воды с поверхности океана. Совокупное действие перечисленных выше факторов приводит также к тому, что на глубинах слоя скачка задерживается значительное число организмов, избегающих перехода в воду с другой температурой, плотностью и соленостью.
Слой скачка наиболее четко выделяется в теплых морях, где разница температур поверхностных и глубинных вод велика. В умеренных и высоких широтах слой скачка летом выделяется особенно четко. Ниже слоя скачка градиенты температуры, плотности, солености быстро уменьшаются, и характеристики воды остаются далее почти неизменными до самого дна.
При прохождении звуковой волны через слой скачка происходит значительное ослабление звука вследствие расширения фронта волны, вызванного преломлением, а также из-за частичного отражения от границ раздела. Расчеты, проведенные в книге А.П.Сташкевич. Акустика моря. Л.: Судостроение, 1966, с.259-262 свидетельствуют о том, что только рефракционные искажения могут снизить сигнал на величину порядка 40 дБ (расчет проведен для ΔС=50 м/с и скорости звука С=1,5·103 м/с).
Наличие слоя скачка приводит к уменьшению дальности действия гидроакустических средств наблюдения и искажению направления эха в вертикальной плоскости.
Слой скачка является естественным средством уменьшения гидроакустической заметности подводных лодок и может быть использован ими при уклонении и отрыве от кораблей, ведущих гидроакустический поиск. При нахождении под слоем скачка ПЛ может скрытно производить измерение подводной шумности корабля-цели, если гидроакустическая антенна будет согласно предлагаемому способу перемещена выше слоя скачка.
Целесообразно конкретизировать также понятие зоны акустической освещенности. Обычно различают ближнюю зону акустической освещенности (БЗАО) и дальнюю зону акустической освещенности (ДЗАО). Согласно определениям под БЗАО понимается пространственная область в толще воды, в которой звуковое поле формируется прямыми и однократно отраженными от поверхности моря лучами; под ДЗАО понимается пространственная область в толще воды, возникающая на значительном расстоянии от источника звука за счет выхода звуковых лучей на горизонт источника после полного внутреннего отражения в глубинных слоях ниже оси подводного звукового канала.
Обоснуем выбор протяженности d активного участка антенны при нахождении ее в вертикальном положении. Как известно, характеристика направленности линейной антенны описывается выражением (М.Д.Смарышев, Ю.Ю.Добровольский. Гидроакустические антенны. Справочник, Л.: Судостроение, 1984, с.135, формула 5.1) вида
где θ отсчитывается от вертикали.
При θо=0, т.е. при дискообразной ХН и на уровне 0,707.
При d/λ>1 полная ширина ХН на уровне 0,7 в отсутствие компенсации (θо=0)
согласно формуле 5.4 упомянутого справочника.
Значит, выбирая

где αо - угол между водно-водным и водно-поверхностным лучами, будет обеспечиваться практически полная пространственная режекция водно-поверхностного луча при ориентации оси ХН на водно-водный луч, иными словами, радиус-вектор на водно-поверхностный луч будет располагаться под углом, вдвое большим полуширины ХН на уровне 0,7.
Обычно в БЗАО угол αо между лучами составляет порядка 15-20°, а ДЗАО он существенно больше.
В настоящее время превалирующими помехами являются помехи от шумов моря. Эти шумы имеют развитую анизотропию в вертикальной плоскости (под редакцией Л.М.Бреховских. Акустика океана. М.: Наука, 1974, с.664-674).
При этом на углах, близких к горизонту в диапазоне углов α, определяемых неравенством
шумы моря практически не поступают. Здесь Со, СП, СД - скорости звука соответственно на горизонте фазового центра ГПБА, у дна и поверхности моря.
Физически подобное явление объясняется дипольным излучением источников шума, расположенных у поверхности моря, а также тем, что основное влияние на уровни шумов оказывают участки поверхности моря, расположенные в непосредственной близости от точки расположения приемника звука (см. статью А.А.Аредов, А.В.Фурдуев. "О связи уровня подводного шума со скоростью ветра и размерами акватории, определяющей шумовое поле". Известия АН СССР. Физика атмосферы и океана, том XV, М., 1979).
Технические преимущества предлагаемого способа сводятся к следующему:
ХН ГПБА 1 из воронкообразной (см. поз. 14 на фиг.3) становится дискообразной 40 (фиг.9). Это позволяет принимать сигналы с направлений, по которым помехи от шумов моря минимальны: (см., например, статью А.А.Аредов, И.Н.Охрименко, А.В.Фурдуев. Анизотропия шумового поля в океане (эксперимент и расчет). Акустический журнал, том XXXIV. выпуск 2, М.: Наука, 1988, УДК 551.463.228, 216-221 с, фиг.3). На фиг.10 приведена угловая интенсивность шумов моря 41. Вертикальная ось графика направлена на поверхность. Из графика 41 фиг.10 видно, что в диапазоне углов примерно ±20° от горизонта интенсивность шумов моря минимальна. Кроме того, при такой ХН, выбирая ее достаточно "узкой", можно отстроиться от приема водно-поверхностного луча и, за счет этого, избавиться от интерференции водно-водного и водно-поверхностного лучей, существенно искажающей результаты измерений.
За счет возможности разделить лучи появляются и другие преимущества, в частности, можно реализовать пассивные методы измерения дистанции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СОБСТВЕННОГО ПОДВОДНОГО ШУМОИЗЛУЧЕНИЯ И ШУМОИЗМЕРИТЕЛЬ | 1989 |
|
SU1840603A1 |
| СПОСОБ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1986 |
|
SU1840507A1 |
| Способ измерения шумности подводного аппарата | 2023 |
|
RU2801077C1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЗОНОГРАФ | 2001 |
|
RU2241964C2 |
| ШУМОПЕЛЕНГАТОРНАЯ СТАНЦИЯ | 1988 |
|
SU1840459A1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО ГЕОФИЗИЧЕСКОГО СУДНА | 2010 |
|
RU2424538C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |

Изобретение относится к гидроакустическим измерениям, а конкретнее, к способам и средствам измерения подводной шумности кораблей. Сущность: способ основан на приеме шумовых сигналов по водно-водному и водно-поверхностному лучам на глубине H1 в зоне акустической освещенности с помощью тракта подводной лодки с гибкой протяженной буксируемой антенной при ее горизонтальном расположении и при ориентации направленности антенны в направлении водно-водного луча, электрической фильтрации сигнала с заданной разрешающей способностью в заданных поддиапазонах частот, осреднении сигнала при маневре подводной лодки по глубине, измерении дистанции до корабля-цели, определении энергетического спектра шумоизлучения. При этом одновременно используют тракт основной носовой антенны с ориентацией оси ее диаграммы направленности вдоль водно-водного луча. Подводную лодку погружают на глубину Н2 под слой скачка. Производят автосопровождение корабля-цели. Переводят гидроакустическую антенну в вертикальное положение так, что ее активная часть с электроакустическими приемниками размещается выше слоя скачка. Определяют угол α0 между водно-водным и водно-поверхностным лучами. Осуществляют прием активной частью антенны на вертикальной длине d, выбираемой из неравенства: 50°·λ/αo≤d≤Ho, где λ - длина звуковой волны в среде, αo - угол между лучами, Нo - вертикальная протяженность зоны акустической освещенности. Измерения осуществляются в диапазоне углов α в вертикальной плоскости, ограниченных неравенствами: -arccosCД/Со≥α≥arccosCП/Co, где Со, СП, СД - скорость звука, соответственно, на горизонте фазового центра активной части антенны, у поверхности и дна моря. Технический результат: обеспечение скрытности подводной лодки, снижение помех от шумов моря. 10 ил.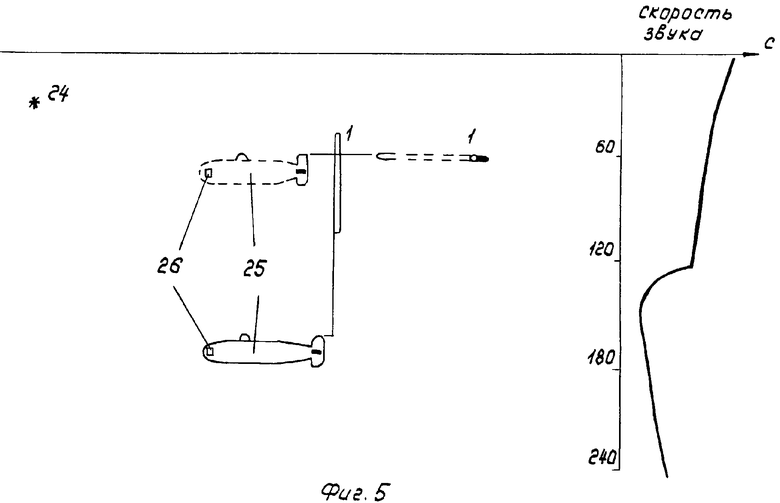
Способ измерения подводной шумности корабля-цели, основанный на приеме шумовых сигналов по водно-водному и водно-поверхностному лучам на глубине Н1 в зоне акустической освещенности с помощью тракта подводной лодки с гибкой протяженной буксируемой антенной при ее горизонтальном расположении и при ориентации направленности антенны в направлении водно-водного луча, электрической фильтрации сигнала с заданной разрешающей способностью в заданных поддиапазонах частот, осреднении сигнала при маневре подводной лодки по глубине, измерении дистанции до корабля-цели, определении энергетического спектра шумоизлучения, отличающийся тем, что, с целью обеспечения скрытности подводной лодки, снижений помех от шумов моря, одновременно используют тракт основной носовой антенны с ориентацией оси ее диаграммы направленности вдоль водно-водного луча, погружают подводную лодку на глубину Н2 под слой скачка, производят автосопровождение корабля-цели, переводят гидроакустическую антенну в вертикальное положение так, что ее активная часть с электроакустическими приемниками размещается выше слоя скачка, определяют угол αо между водно-водным и водно-поверхностным лучами и осуществляют прием активной частью антенны на вертикальной длине d, выбираемой из неравенства:
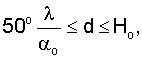
где λ - длина звуковой волны в среде,
αо - угол между лучами,
Но - вертикальная протяженность зоны акустической освещенности,
причем измерения осуществляют в диапазоне углов α в вертикальной плоскости, ограниченных неравенствами:
где Со, СП, СД - скорость звука, соответственно, на горизонте фазового центра активной части антенны, у поверхности и дна моря.
| СПОСОБ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1986 |
|
SU1840507A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

