Изобретение относится к области гидроакустики, а конкретнее, к области гидроакустических измерений подводного шумоизлучения.
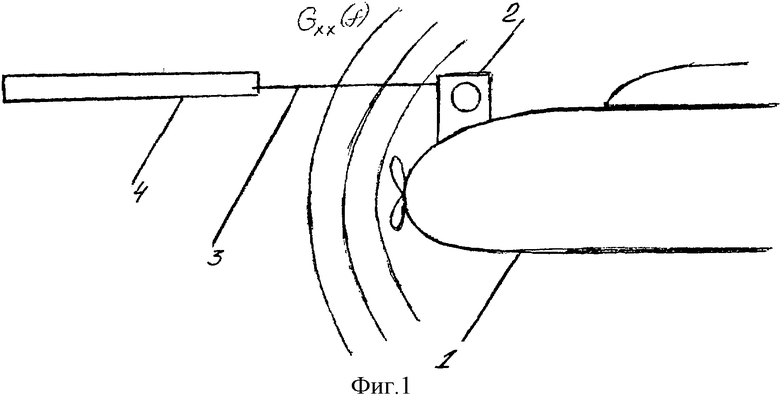
В связи с этим в последние годы начали для измерения подводного шумоизлучения использовать тракты гибких протяженных антенн, буксируемых за кораблем (ГПБА), в которых максимум характеристики направленности направляют на корабль-буксировщик, то есть на свой корабль, шумность которого измеряется (фиг.1). Развитие способов и устройств, реализующих такие измерения подводного шумоизлучения корабля, представляется актуальной задачей.
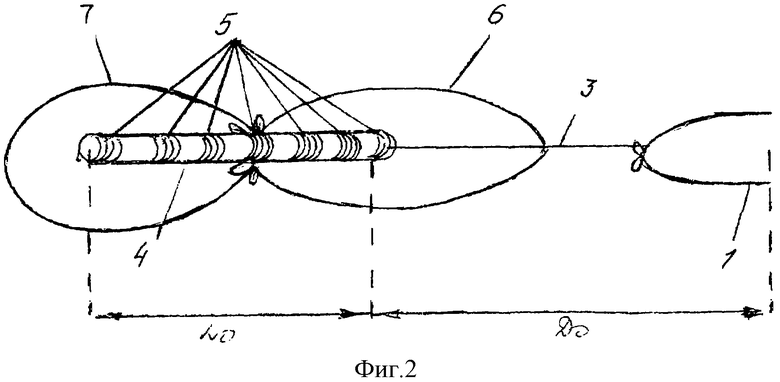
Известен способ-аналог измерения шумоизлучения подводной лодки, заключающийся в том, что при движении подводной лодки с заданной скоростью ν на глубине Н принимают подводное шумоизлучение гидроакустической антенной, буксируемой за подводной лодкой, по энергетическому спектру которого судят об измеряемом параметре - подводном шумоизлучении корабля (фиг.2). Для повышения достоверности результатов измерений принимают сигнал-шум всенаправленными приемниками антенны в N точках, расположенных на прямой по трассе движения подводной лодки заданной длины Lо на заданном расстоянии первой точки от акустического центра подводной лодки. Шумоизлучение определяют по среднему значению измеренных спектров. При этом длину Lo, расстояние Dо и количество точек измерения N выбирают из соотношений:


где С - скорость звука в среде;
Hmin - минимальная глубина погружения подводной лодки, при которой производится измерение;
fн, fв - нижняя и верхняя частота диапазона измерений соответственно.
Недостатком способа-аналога является то, что подводная лодка "заслонена" от ГПБА кильватерным следом, прохождение звука через который зависит от скорости подводной лодки, глубины погружения и других факторов. Передаточная функция Нх(f) между подводной шумностью подводной лодки и ГПБА из-за этого не известна. Поэтому достоверность измерений остается не достаточно высокой.
Устройства временной и пространственной обработки тракта с ГПБА, соответствующим характеристике направленности, нацеленной на корабль-буксировщик, второй вход этой схемы соединен с выходом, соответствующим характеристике направленности, отвернутой от корабля-буксировщика, а выход схемы сравнения для принятия решения о допустимом уровне шумоизлучения корабля соединен со входом устройства.
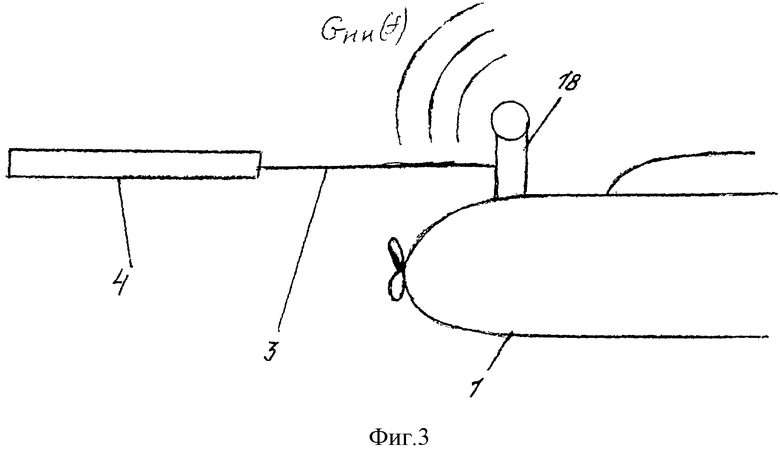
Известен способ измерения подводного шумоизлучения корабля, использованный в авт. св-ве №1840366 от 1.04.82 г. на "Устройство для измерения шумоизлучения корабля", выбранный за способ-прототип. Согласно этому способу на подводной лодке создают искусственное излучение "эталонного" сигнала (фиг.4). Для снижения смещенности оценки сигнала дополнительно формируют две характеристики направленности (ХН) ГПБА: ориентированную в направлении, противоположном направлению на подводную лодку, и в направлении на подводную лодку. По ХН, ориентированной на подводную лодку, принимают смесь полезного сигнала и помех. По второй ХН, отвернутой от подводной лодки, принимают помехи. Далее сравниваются сигналы, принимаемые ГПБА при включенном излучателе "эталонного" сигнала и после выключения этого излучателя. Если с помощью вспомогательного сосредоточенного излучателя "эталонное" излучение будет создаваться с энергетическим спектром Gии(f), приведенным к единичному расстоянию, то производя сопоставление подводного шумоизлучения подводной лодки с этим "эталонным" сигналом, определяют искомый энергетический спектр подводного шумоизлучения Gxx(f), приведенный к единичному расстоянию, по формуле
где  ,
,  - энергетические спектры на выходе ГПБА при воздействии на характеристику направленности, нацеленную на подводную лодку, шума от "эталонного" излучателя и при выключенном излучателе соответственно в смеси с помехами,
- энергетические спектры на выходе ГПБА при воздействии на характеристику направленности, нацеленную на подводную лодку, шума от "эталонного" излучателя и при выключенном излучателе соответственно в смеси с помехами,  - энергетический спектр помех на выходе ХН ГПБА, отвернутой от подводной лодки.
- энергетический спектр помех на выходе ХН ГПБА, отвернутой от подводной лодки.
Основным недостатком способа-прототипа является то, что градуировка "эталонного" излучателя, выполняемая обычно в условиях открытого водного пространства, нарушается после установки этого излучателя на подводной лодке из-за влияния корпуса подводной лодки. Поэтому градуировка "эталонного" излучателя производится непосредственно на подводной лодке. Для этого над излучателем устанавливается измерительное координатное устройство (ИКУ КП), на стреле которого устанавливается отградуированный гидрофон. По данным о чувствительности гидрофона осуществляют градуировку "эталонного" излучателя, т.е. определяют излучаемый им энергетический спектр Gии(f), приведенный к единичному расстоянию. Эта градуировка производится на специальном выходе подводной лодки в полигон. Кроме того, в процессе эксплуатации не представляется возможным выполнить поверку градуировки, то есть осуществить калибровку невозможно.
Другим недостатком способа-прототипа является недостоверность проведенной градуировки из-за того, что при длинах волн соизмеримых с размером корпуса подводной лодки. Корпус подводной лодки видоизменяет характеристику направленности "эталонного" излучателя. Вынести при градуировке за зону Френеля вспомогательный гидрофон на штанге ИКУ-КП не представляется возможным, так как Фраунгоферова зона начинается на сотнях метров (на расстояниях r≥2D2/λ, где D - размер корпуса, λ - длина звуковой волны в среде) от излучателя. Нужно отметить, что вообще с помощью гидрофона, установленного на подводной лодке, не удается правильно отградуировать излучатель.
Таким образом, недостатки способа-прототипа сводятся не только к большим временным затратам, но и к недостоверности результатов измерений.
Способ-прототип реализуется с помощью устройства-прототипа по авт. св-ву №1840366. Это устройство для измерения шумоизлучения корабля содержит блок шумоизлучения и приемник акустических сигналов, выполненный в виде последовательно связанных гидроакустической антенны, анализатора спектра, переключателя, блока перемножения, регистратора и включенных между переключателем и блоком перемножения первого долговременного запоминающего узла (ДЗУ) и блока деления, к которому также подключен второй ДЗУ. С целью повышения помехозащищенности измерения при низком уровне шумоизлучения, оно снабжено включенным между анализатором спектра и переключателем блоком смещения оценки, включенным между первым ДЗУ, переключателями и блоком деления последовательно связанными третьим ДЗУ и блоком вычитания и включенными между блоком перемножения и регистратором параллельно связанными сумматором и анализатором погрешности (фиг.4).
Недостатки устройства-прототипа обусловлены недостатками способа-прототипа, а именно, большие временные затраты на градуировку и необходимость использования специальных устройств типа ИКУ-КП.
Целью изобретения является уменьшение времени на подготовку к измерениям, в частности на градуировку излучателя, обеспечение возможности поверки измерительного тракта и выполнения измерений шумности в процессе автономного плавания подводной лодки, а также в повышении достоверности измерений.
Поставленная цель достигается следующими операциями предлагаемого способа:
1) измеряют энергетический спектр на выходе ГПБА с характеристикой направленности, максимум которой наведен на подводную лодку  и с характеристикой направленности, отвернутой от подводной лодки
и с характеристикой направленности, отвернутой от подводной лодки  . Эти операции совпадают с операциями способа-прототипа;
. Эти операции совпадают с операциями способа-прототипа;
2) измеряют энергетический спектр помех на выходе вспомогательного приемника Gэ,и(f);
3) по завершении измерений и  создают искусственный шум с помощью сосредоточенного излучателя, расположенного в кормовой части подводной лодки. При этом выбирают энергетический спектр этого излучения, приведенный к единичному расстоянию, Gии(f) такой, чтобы он по крайней мере на 10 дБ превышал шум моря. Эта операция также совпадает с операцией способа-прототипа;
создают искусственный шум с помощью сосредоточенного излучателя, расположенного в кормовой части подводной лодки. При этом выбирают энергетический спектр этого излучения, приведенный к единичному расстоянию, Gии(f) такой, чтобы он по крайней мере на 10 дБ превышал шум моря. Эта операция также совпадает с операцией способа-прототипа;
4) при включенном излучателе осуществляют прием шума с помощью ГПБА и с помощью приемника, расположенного на фиксированном расстоянии rг на подводной лодке, причем rг выбирают так, чтобы удовлетворялось неравенство

где d - наибольший размер активной части излучателя,
λв - длина звуковой волны на верхней частоте рабочего диапазона,
Gэ, и(f) - энергетический спектр помех на выходе приемника,
γг(f) - частотная характеристика чувствительности приемника (гидрофона);
5) при включенном излучателе формируют взаимный энергетический спектр между шумовыми сигналами на выходе ГПБА с характеристикой направленности, максимум которой наведен на подводную лодку, и шумовым сигналом на выходе приемника GГПБА, г, и(f), а также энергетический спектр Gг, и(f) на выходе приемника и определяют передаточную функцию среды по формуле
где Gг, и(f) - энергетический спектр шума на выходе приемника при включенном излучателе;
6) измеряют взаимный энергетический спектр шумов на выходе ГПБА и приемника, выделяют фазовую характеристику взаимного энергетического спектра при выключенном излучателе θГПБА, г, и(f), т.е.

7) находят расстояние между фазовым центром ГПБА и акустическим центром подводного шумоизлучения подводной лодки R по формуле
где C - скорость звука в среде;
8) перемещают ГПБА по прямой, проходящей через ось антенны, устанавливая расстояние Rо между акустическим центром подводного шумоизлучения подводной лодки и фазовым центром ГПБА, равным расстоянию Rоо между вспомогательным излучателем и фазовым центром ГПБА;
9) измеряют энергетический спектр шума на выходе ГПБА и определяют приведенный к единичному расстоянию энергетический спектр подводного шумоизлучения подводной лодки по формуле
чем полностью решают стоящую задачу.
При этом исключается зависимость от физических свойств, кильватерной струи, "заслоняющей" ГПБА от подводной лодки, учитываются интерференционные искажения за счет водно-водного и водно-поверхностного лучей, а также дифракционные искажения, поскольку Hx(f) определяется из прямого эксперимента при расположении ГПБА во Фраунгоферовой зоне. Особо следует отметить, что если способ-прототип был способом сравнения шумности подводной лодки с "эталонным" излучением, то предлагаемый способ основан на прямом измерении передаточной функции. Он не требует абсолютной градуировки ни ГПБА, ни "эталонного" излучателя. В обоих способах используется заранее отградуированный гидрофон.
Для реализации способа предлагается устройство - бортовой шумоизмеритель, блок-схема которого приведена на фиг.5. Этот шумоизмеритель, находящийся на борту подводной лодки, содержит параллельно-последовательно соединенные блоки, входящие в устройство-прототип, а именно ГПБА, устройства предварительной обработки, АЦП и уплотнения цифровой информации, разуплотнения и запоминания цифровой информации, спектрального анализа и формирования характеристик направленности (ХН), временной и пространственной обработки, схема смещенности оценок сигнала и устройство индикации и регистрации. Так же как и в устройстве-прототипе имеется передающий тракт, содержащий последовательно соединенный генератор, усилитель мощности и излучатель. Дополнительно в устройство введены последовательно соединенные электроакустический приемник (гидрофон), предварительный усилитель, блок АЦП, блок запоминания цифровой информации, анализатор взаимного энергетического спектра, второй вход которого соединен с устройством разуплотнения и запоминания цифровой информации, а выход соединен со вторым входом схемы обработки сигнала, спектроанализатор, схема обработки сигнала, третий вход которой соединен с блоком снижения смещенности оценок сигнала и накапливающего сумматора. Также используется долговременное запоминающее устройство, выход которого соединен с четвертым входом схемы обработки сигнала. Введен также блок управления, обеспечивающий синхронизацию работы шумоизмерителя.
Заявителю и авторам не известны из патентной и научно-технической литературы аналогичные технические решения, содержащие указанную выше совокупность блоков и их взаимосвязи, что позволяет считать предлагаемый шумоизмеритель, отвечающим критерию "существенные отличия".
На фиг.1 приведено пояснение к способу-аналогу. Здесь:
1 - подводная лодка, буксирующая гибкую протяженную буксируемую антенну (ГПБА), 2 - лебедка ГПБА, 3 - кабель-трос, 4 - ГПБА.
На фиг.2 приведено пояснение к способу-аналогу. Здесь:
5 - приемники ГПБА, 6 - характеристика направленности (ХН), нацеленная на подводную лодку, 7 - ХН, отвернутая от подводной лодки.
На фиг.3 приведено пояснение к способу-прототипу. Здесь: 18 - излучатель "эталонного" сигнала, создающий на единичном расстоянии энергетический спектр шума Gии(f).
На фиг.4 приведена блок-схема устройства-прототипа. Здесь: 19 - генератор, 20 - усилитель мощности, 21 - спектроанализатор, 22 - блок (схема) снижения смещенности оценки сигнала, 23 - переключатель, 24 - блок перемножения, 25 - накапливающий сумматор, 26 - регистратор и индикатор подводной шумности подводной лодки, 27 - первое долговременное запоминающее устройство (ДЗУ), 28 - второе ДЗУ, 29 - третье ДЗУ; 30 - блок деления, 31 - анализатор погрешности, 32 - вычитатель.
На фиг.5 приведена блок-схема предлагаемого бортового шумоизмерителя. Здесь: 33 - приемник (гидрофон), 34 - предварительный усилитель, 35 - аналого-цифровой преобразователь (АЦП) тракта приемника, 36 - блок запоминания цифровой информации тракта приемника, 37 - анализатор энергетического взаимного спектра, 38 - анализатор энергетического спектра, 39 - схема обработки сигнала, 40 - блок долговременных запоминающих устройств (ДЗУ), 41 - блок управления шумоизмерителя.
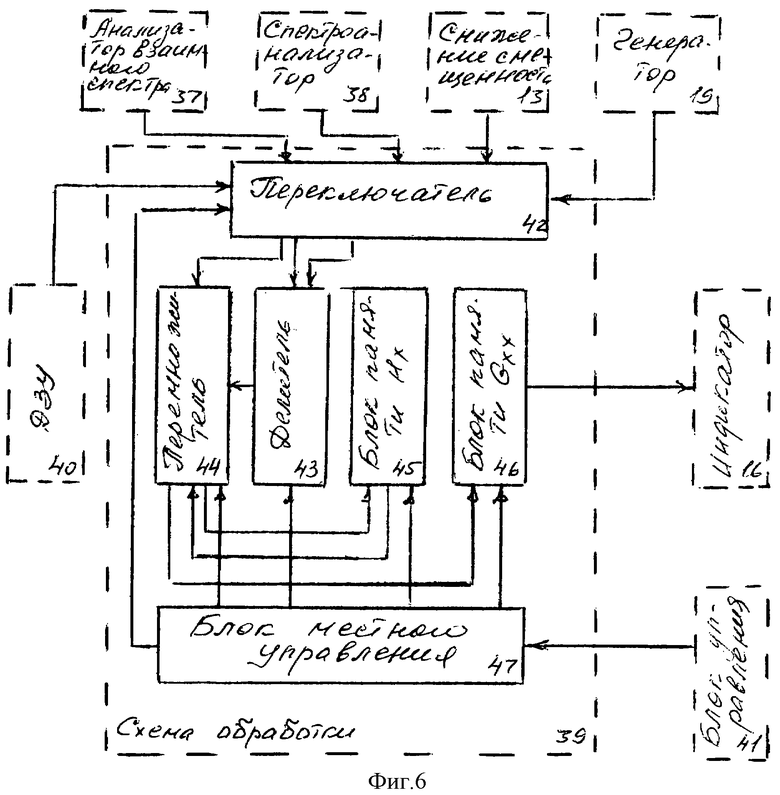
На фиг.6 приведена блок-схема блока (схемы) обработки сигнала. Здесь: 42 - переключатель, 43 - делитель, 44 - перемножитель, 45 - блок памяти передаточной функции среды (Нх), 46 - блок памяти измеренного энергетического спектра шумоизлучения корабля (Gx), 47 - блок местного управления.
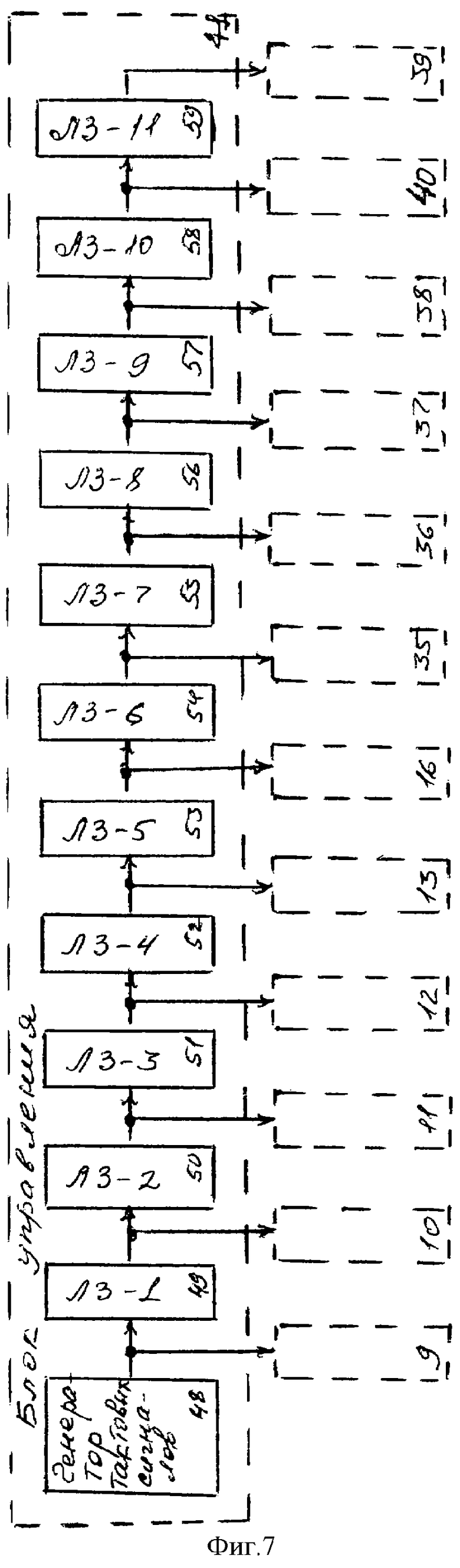
Ha фиг.7 приведена блок-схема блока управления шумоизмерителя 41. Здесь: 48 - генератор тактовых сигналов, 49 - первая линия задержки (ЛЗ), 50 - вторая ЛЗ, 51 - третья ЛЗ, 52 - четвертая ЛЗ, 53 - пятая ЛЗ, 54 - шестая ЛЗ, 55 - седьмая ЛЗ, 56 - восьмая ЛЗ, 57 - девятая ЛЗ, 58 - десятая ЛЗ, 59 - одиннадцатая ЛЗ.
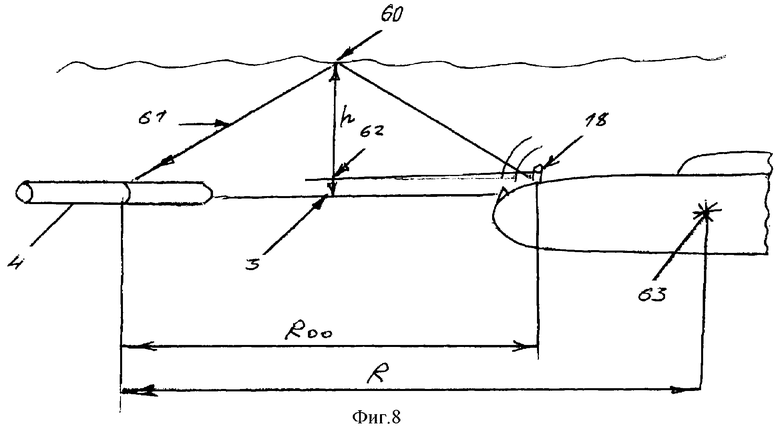
На фиг.8 приведено пояснение к операции перемещения ГПБА на расстояние Rо=Rоо. Здесь: 60 - поверхность моря, 61 - водно-поверхностный луч, 62 - водно-водный луч, 63 - акустический центр шумоизлучения.
Измерения производятся с помощью бортовой аппаратуры - шумоизмерителем, содержащим (фиг.6) последовательно-параллельно соединенные гибкую протяженную буксируемую антенну (ГПБА) 4, блок предварительной обработки 8, блок аналого-цифрового преобразования (АЦП) и уплотнения цифровой информации 9, блок-разуплотнения и запоминания цифровой информации 10, блок спектрального анализа и формирования характеристик направленности 11, блок временной и пространственной обработки 12, блок снижения смещенности оценок сигнала и накапливающий сумматор 13, блок индикации и регистрации 16, а также последовательно соединенные генератор 19, усилитель мощности 20 и излучатель 18.
В шумоизмеритель введены последовательно соединенные приемник 33, предварительный усилитель 34, второй АЦП 35, второй блок запоминания цифровой информации 36, анализатор взаимного спектра 37, второй вход которого соединен с блоком запоминания цифровой информации 10, схема обработки сигнала 39, второй вход которой соединен с долговременным запоминающим устройством (ДЗУ) 40, третий вход - с блоком снижения смещенности и накапливающим сумматором 13, также введен ДЗУ 40, выход которого соединен со схемой обработки сигнала 39, также введен спектроанализатор 38, вход которого соединен с выходом блока запоминания цифровой информации 36, а выход соединен со схемой обработки сигнала 39, также введен блок управления 41, синхровыходы которого соединены с синхровходами блоков устройства.
Схема обработки сигнала 39 содержит (фиг.7) переключатель 42, первый, второй, третий, четвертый, пятый входы которого соединены соответственно с выходами ДЗУ 40, анализатора взаимного спектра 37, спектроанализатором 38, схемы снижения смещенности 13, генератора 19, также содержит последовательно соединенные делитель 43, первый и второй входы которого соединены с первым и вторым выходами переключателя 42, перемножитель 44, второй вход которого соединен с третьим входом переключателя 42, также содержит блок памяти коэффициента передачи среды Hx(f) 45 вход и выход которого соединены с перемножителем 44, блок памяти измеренного спектра шумоизлучения корабля Gxx(f), вход которого соединен с выходом перемножителя 44, а выход соединен со входом индикатора 16, также содержит блок местного управления 47, вход которого соединен с выходом блока управления шумоизмерителя 41, а первый, второй, третий, четвертый, пятый синхровыходы соединены соответственно с синхровходами переключателя 42, делителя 43, перемножителя 44, блоков памяти 45 и 46.
Блок управления шумоизмерителем 41 содержит (фиг.8) последовательно соединенные генератор тактовых сигналов 48, первую линию задержки (Л3) 49, вторую ЛЗ 50, третью ЛЗ 51, четвертую ЛЗ 52, пятую ЛЗ 53, шестую ЛЗ 54, седьмую ЛЗ 55, восьмую ЛЗ 56, девятую ЛЗ 57, десятую ЛЗ 58, одиннадцатую ЛЗ 59, синхровыходы которых соединены соответственно с синхровходами блоков 9, 10, 11, 12, 13, 16, 35, 36, 37, 38, 40, 39.
Работа шумоизмерителя осуществляется в двух режимах: при включенном генераторе, создающим искусственный шум, и при выключенном генераторе в режиме приема естественного подводного шумоизлучения корабля. В первом случае работают оба тракта: приемный тракт ГПБА и приемный тракт вспомогательного приемника. Во втором случае используется только тракт ГПБА, с помощью которого ведут прием собственного подводного шумоизлучения корабля по характеристике направленности (ХН) ГПБА, нацеленной на свой корабль (фиг.2).
Работа тракта ГПБА осуществляется следующим образом. ГПБА 4 принимает смесь шумов-помех и шумоизлучение корабля, буксирующего антенну. Сигналы, принятые электроакустическими приемниками 5, входящими в ГПБА 4 передаются по кабель-буксиру 3, усиливаются и отфильтровываются в блоке предварительной обработки сигналов 8. Затем последовательно опрашиваются АЦП и принятый шум преобразуется в цифровую форму в устройстве 9. Цифровая информация передается в устройство разуплотнения и запоминания цифровой информации 10, где хранится перед дальнейшей обработкой. Затем хранящаяся в устройстве 10 цифровая информация подвергается двумерному быстрому преобразованию Фурье в устройстве 11.
Операции БПФ проводятся сначала по временным реализациям в каждом канале, а затем по пространственным реализациям в каждой частотной точке. В результате получается пространственно-частотный спектр акустических сигналов, эквивалентный статическому вееру ХН в каждой из частотных точек их узкополосного частотного спектра. Для последовательно получаемых таким способом реализаций пространственно-частотного спектра производится вычисление квадрата модуля спектральных составляющих и усреднение в блоке временной и пространственной обработки 12. Полученные оценки энергетических спектров отображаются на индикаторе 16 (для тех характеристик направленности, которые не участвуют в измерении собственного шумоизлучения корабля).
В схеме снижения смещенности оценок сигналов и накапливающем сумматоре 13 формируется энергетическая разность смеси шума-помех и шума-сигнала по ХН6, нацеленной на подводную лодку, и шума-помех по ХН7, отвернутой от корабля-буксировщика 1 (фиг.2). "Очищенная" от постоянной составляющей помех оценка энергетического спектра сигнала - шумоизлучения подводной лодки, буксирующей ГПБА подается на устройство 39.
Работа тракта вспомогательного приемника осуществляется следующим образом. Шумовой искусственный сигнал принимается электроакустическим приемником 33, усиливается и отфильтровывается (в том же частотном диапазоне, что и в блоке 8) в блоке предварительного усилителя 34, переводится в цифровую форму в блоке АЦП 35 и запоминается в блоке запоминания цифровой информации 36.
При включенном генераторе 19 цифровая информация попадает на спектроанализатор 38, в котором осуществляется быстрое преобразование Фурье (БПФ), сглаживание с помощью спектрального окна, накопление и осреднение по ансамблю энергетических спектров. При этом из временной последовательности x(n) выбирают последовательность из L отсчетов xr(n). Далее выполняют преобразование Фурье

где W(n) - спектральное окно.
Далее вычисляется периодограмма
где
U - энергия окна.
Оценка энергетического спектра определяется по формуле
где N - число осредняемых реализаций энергетического спектра. Одновременно производится взаимоспектральная обработка шумовых сигналов x(n), поступающих по тракту вспомогательного приемника 33, и шумовых сигналов y(n), поступающих по тракту ГПБА 4. Взаимный энергетический спектр в блоке 37 вычисляется по алгоритму: для каждой из последовательностей xr(n) и yr(n) рассчитываются коэффициенты БПФ

Вычисляется периодограмма

и находится оценка взаимного энергетического спектра
где * - знак комплексного сопряжения.
Данные об энергетическом спектре с блока 38 и об энергетическом взаимном спектре с блока 37 поступают на схему обработки сигнала 39. В блоке 39 при включенном генераторе 19 переключатель 42 обеспечивает подачу на делитель модуля энергетического взаимного спектра |GГПБА, г, и(f)| с блока 37 и энергетического спектра Gг, и(f) с блока 38. Отношение этих спектров в блоке 44 перемножается с частотной функцией  , занесенной в ДЗУ 40 и поданный на перемножитель 44. Выработанная частотная функция |Нx(f)| запоминается в блоке памяти 45.
, занесенной в ДЗУ 40 и поданный на перемножитель 44. Выработанная частотная функция |Нx(f)| запоминается в блоке памяти 45.
Определяется также R.
Далее после перемещения ГПБА на расстояние Ro генератор выключается и продолжает приниматься и обрабатываться сигнал по тракту ГПБА (блоки 4, 8, 9, 10, 11, 12, 13). В схеме обработки сигналов 39 переключатель 42 подает на перемножитель сигнал , снимаемый со схемы 13. В схеме 39 вычисляется по алгоритму (7) энергетический спектр собственного подводного шумоизлучения корабля Gхх(f).
Таким образом, предложенное устройство - шумоизмеритель, находящийся на борту корабля, полностью решает поставленную задачу.
Практическое исполнение блоков предлагаемого устройства - шумоизмерителя - известно из практики гидроакустики и из технической литературы.
Особенности построения ГПБА 4 и параметры ГПБА, состоящих на вооружении зарубежных стран, изложены в статье А.А.Гурвич и др. Гидроакустические системы с гибкими протяженными буксируемыми антеннами. Журнал "Судостроение за рубежом", №10, - Л.: Судостроение, 1984, с.34-52.
Устройство предварительной обработки сигналов 8, предназначенное для многоканального усиления и фильтрации сигналов с приемников ГПБА, а также блок 34 реализуются с использованием малошумных усилителей на полевых транзисторах и фильтров нижних частот. Схема малошумного малогабаритного усилителя сигналов от пьезоэлектрического преобразователя приведена, например, в книге А.Н.Игнатов. Полевые транзисторы и их применение. М.: Радио и связь, 1984, рис.4.11. Фильтры нижних частот выполняются в виде аналоговых интегральных микросхем, описанных, например, в книге Б.Е.Успенский. Активные RC-фильтры. М.: ДОСААФ СССР, 1986, с.57.
Блоки аналого-цифрового преобразования и уплотнения цифровой информации 9 и 35 строятся с использованием последовательно соединенных аналогового коммутатора и аналого-цифрового преобразователя (АЦП) с использованием интегральных микросхем, описанных в книге под редакцией С.В.Якубовского. Аналоговые и цифровые интегральные микросхемы. М.: Радио и связь, 1985, с.357, с.371.
Устройства разуплотнения и запоминания цифровой информации 10 и 35 широко используются в цифровой вычислительной технике и являются обязательным элементом любой ЭВМ. Они описаны, например, в книге под редакцией А.Ю.Гордона. Полупроводниковые запоминающие устройства. М.: Радио и связь, 1981, фиг.3.1, 3.5, 3.15.
Спектроанализатор и формирователь характеристик направленности (ХН) 11, спектроанализатор 38 и анализатор взаимного спектра реализуются на спецпроцессорах БПФ и устройствах запоминания цифровой информации, аналогичных устройству 10. Особенности построения спецпроцессоров БПФ изложены в книге Л.Рабинер, Б.Гоулд. Теория и применение цифровой обработки сигналов. М.: Мир, 1978, фиг.10.18, 10.21.
Устройство временной и пространственной обработки 12 является многоканальным устройством, осуществляющим в каждом канале получение квадрата модуля спектральных составляющих, вычисленных в устройстве 11, с помощью интегральной микросхемотехники, описанной в справочнике под редакцией Б.В.Тарабрина. Интегральные микросхемы. М.: Радио и связь, 1983, с.59.
Устройство снижения смещенности оценок сигнала и накапливающий сумматор 13 подробно изложены в описании заявки-прототипа и строится из элементов, описанных в книгах П.П.Орнатский. Автоматические измерения и приборы. Киев: Вища школа, 1980, с.1220 А.И.Домарацкий. Дискретная измерительная корреляционная система. Новосибирск.: Наука, 1965, с.36, А.В.Фремке. Телеизмерения. М.: Высшая школа, 1975, с.174.
Устройство индикации и регистрации сигнала 16 описано, например, в книге под редакцией М.И.Кривошеева и А.Я.Брейберта. Современные методы и устройства отображения информации. М.: Радио и связь, 1981, с.216.
Устройство ДЗУ 40 и блоки, входящие в схему обработки сигнала 39, широко используются в цифровой вычислительной технике (см., например, В.Ю.Кончаловский. Цифровые измерительные устройства. М.: Энергоатомиздат, 1985, Е.А.Чернявский, Д.Д.Недосекин, В.В.Алексеев. Измерительно-вычислительные устройства и комплексы. Л.: ЛЭТИ, 1984 и др.).
В качестве приемника 33 используется обычный сферический гидрофон (см., например, книгу Э.С.Таранов, А.М.Тюрин, А.П.Сташкевич. Гидроакустические измерения в океанологии. Л.: Гидрометеоиздат, 1972, с.72, рис.3.25).
Для подтверждения достигаемого эффекта приведем теоретическое обоснование предлагаемого способа. Передаточная функция среды Hx(f) априори не известна. Из-за кильватерного следа сферический закон не соблюдается. Значит, как первый этап измерения Gxx(f) - энергетического спектра шумоизлучения своего корабля - требуется экспериментально определить Hx(f). Следует при этом учесть, что частотная характеристика чувствительности ГПБА 4 также не известна; определение ее связано с очень серьезными техническими трудностями; со столь серьезными, что до настоящего времени такие измерения не делаются.
Как известно из общей теории линейных систем (см., например, Л.Заде, Ч.Дезоер. Теория линейных систем. М.: Наука, 1970, с.473-514) энергетический взаимный спектр на выходе линейной системы с двумя входами и двумя выходами

где GГПБА, г, и(f) - взаимный энергетический спектр, трактов ГПБА и приемника; Hx(f) - передаточная функция от источника шума к ГПБА; Hг(f) - передаточная функция от источника шума к приемнику; Gии(f) - энергетический спектр шумоизлучения на единичном расстоянии,
* - знак комплексного сопряжения.
Последнее выражение комплексное. Нас интересует модуль |Hx(f)|. Поэтому выделив модуль взаимного энергетического спектра, найдем

С другой стороны, энергетический спектр Gг(f) на выходе тракта вспомогательного приемника (смотрите, например, П.Эйкхофф. Основы идентификации систем управления. М.: Мир, 1975, с.361-382).

или, учитывая, что
нетрудно записать, что
Из этих выражений нетрудно найти, что
Видно, что нам удалось найти передаточную функцию |Hx(f)| без сведений о частотной характеристике чувствительности ГПБА в режиме приема и, что не менее важно, без абсолютных данных о частотной характеристике чувствительности в режиме излучения вспомогательного излучателя.
Теперь, включив источник искусственного шума и измеряя описанным выше способом шум корабля по тракту ГПБА, найдем

что и требовалось доказать. Последнюю формулу можно переписать в виде
чем полностью решается поставленная задача.
Энергетический взаимный спектр между трактами ГПБА и приемника при включенном генераторе 19 может быть записан в виде

Отсюда можно найти расстояние между акустическим центром подводной лодки и фазовым центром ГПБА по формуле (9).
Обоснуем операцию перемещения ГПБА на расстояние Rо=Rоо. Как показано на фиг.9, на ГПБА 4 проходит два луча: водно-водный 62 и водно-поверхностный 61. При включенном излучателе 18 принятый ГПБА 4 сигнал будет иметь вид

где R(θ,f) - характеристика направленности ГПБА в вертикальной плоскости,
котр - коэффициент отражения от поверхности,
Т - время запаздывания водно-поверхностного луча относительно водно-водного.
Как видно из фиг.9,
на низких частотах R(θ,f)≅1 и котр(f)≅1 и, следовательно

Интерференционная ошибка на ряде частот может быть существенной. Теоретически учесть ее практически не удается, так как требуется очень точное определение Т, без чего решение обратной задачи становится некорректным. Поэтому эффективна операция предлагаемого способа: переместить ГПБА 4 на такое расстояние Ro от акустического центра шумоизлучения 63, что Rо=Rоо т.к. переместить ГПБА ближе к подводной лодке на расстояние

Отсчет осуществляется от фазового центра ГПБА, который, как известно, расположен в центре линейной антенны (см., например, М.Д.Смарышев. Направленность гидроакустических антенн. Л.: Судостроение, 1973, с.47-49). При этом передаточная функция  будет отсчитываться от акустического центра подводной лодки с учетом интерференционных искажений.
будет отсчитываться от акустического центра подводной лодки с учетом интерференционных искажений.
Теперь обоснуем выбор расположения вспомогательного приемника 33. С одной стороны, он должен располагаться во Фраунгоферовой зоне вспомогательного излучателя 18, т.е.

где d - размер излучателя, λв - верхняя частота рабочего диапазона.
С другой стороны, максимальное расстояние rг, max должно быть таким, чтобы акустические и электрические помехи не мешали приему искусственного шумоизлучения, т.е.

на всех частотах рабочего диапазона.
Учитывая, что

Найдем, что
что и требовалось доказать.
Технические преимущества сводятся к следующему:
- существенное сокращение времени на подготовку к измерениям,
- возможность выполнять измерения подводной шумности Gxx(f) в автономном плавании подводной лодки,
- повышение точности измерений за счет того, что в способе-прототипе принимаются за истинные данные о градуировке "эталонного" излучателя во Френелевой зоне, т.е. не учитываются искажения, вносимые корпусом подводной лодки. В предлагаемом способе абсолютная градуировка чувствительности излучателя не требуется.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПОДВОДНОЙ ШУМНОСТИ КОРАБЛЯ-ЦЕЛИ | 1989 |
|
SU1840512A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1982 |
|
SU1840366A1 |
| СПОСОБ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1986 |
|
SU1840507A1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| ШУМОПЕЛЕНГАТОРНАЯ СТАНЦИЯ | 1988 |
|
SU1840459A1 |
| Способ измерения шумности подводного аппарата | 2023 |
|
RU2801077C1 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО ГЕОФИЗИЧЕСКОГО СУДНА | 2010 |
|
RU2424538C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морской цели | 2023 |
|
RU2810699C1 |
| Способ обработки кратковременного нестационарного случайного процесса шумоизлучения | 2023 |
|
RU2808947C1 |
| Способ обнаружения и классификации гидроакустических сигналов шумоизлучения морского объекта | 2019 |
|
RU2726291C1 |

Изобретение относится к области гидроакустики и может быть использовано при гидроакустических измерениях подводного шумоизлучения. Сущность: способ включает прием смеси подводного шумоизлучения и помех при включенном и выключенном излучателе по характеристике направленности гибкой протяженной буксируемой антенны (ГПБА), ориентированной на свой корабль. Кроме того, осуществляется прием помех по характеристике направленности ГПБА, отвернутой от своего корабля. Компенсация помех осуществляется энергетическим вычитанием помех из смеси сигнала подводного шумоизлучения и помех. Далее осуществляется определение энергетического спектра шумоизлучения, приведенного к единичному расстоянию. Кроме того, дополнительно осуществляют прием шума с помощью тракта вспомогательного приемника, располагаемого на расстоянии rг от излучателя на подводной лодке, на которой до включения искусственного излучения измеряют энергетический спектр акустических и электрических помех, выделяют взаимный энергетический спектр между шумовыми сигналами на выходе ГПБА и вспомогательного приемника, а также энергетический спектр на выходе вспомогательного приемника. Определяют передаточную функцию среды. Выделяют фазовую часть взаимного энергетического спектра. Определяют расстояние между фазовым центром ГПБА и акустическим центром подводного шумоизлучения подводной лодки. Перемещают ГПБА по прямой, проходящей через центр ГПБА. Энергетический спектр шумоизлучения определяют при расстоянии между акустическим центром подводного шумоизлучения подводной лодки и фазовым центром ГПБА путем приближения ГПБА к подводной лодке. Причем при включенном вспомогательном излучателе регистрируют на выходе ГПБА энергетический спектр сигнала от подводного излучения корабля, очищенный от постоянной составляющей помех. Определяют приведенный к единичному расстоянию энергетический спектр подводного шумоизлучения подводной лодки с учетом передаточной функции. Технический результат: повышение достоверности и уменьшения времени на градуировку. 2 н. и 1 з.п. ф-лы, 8 ил.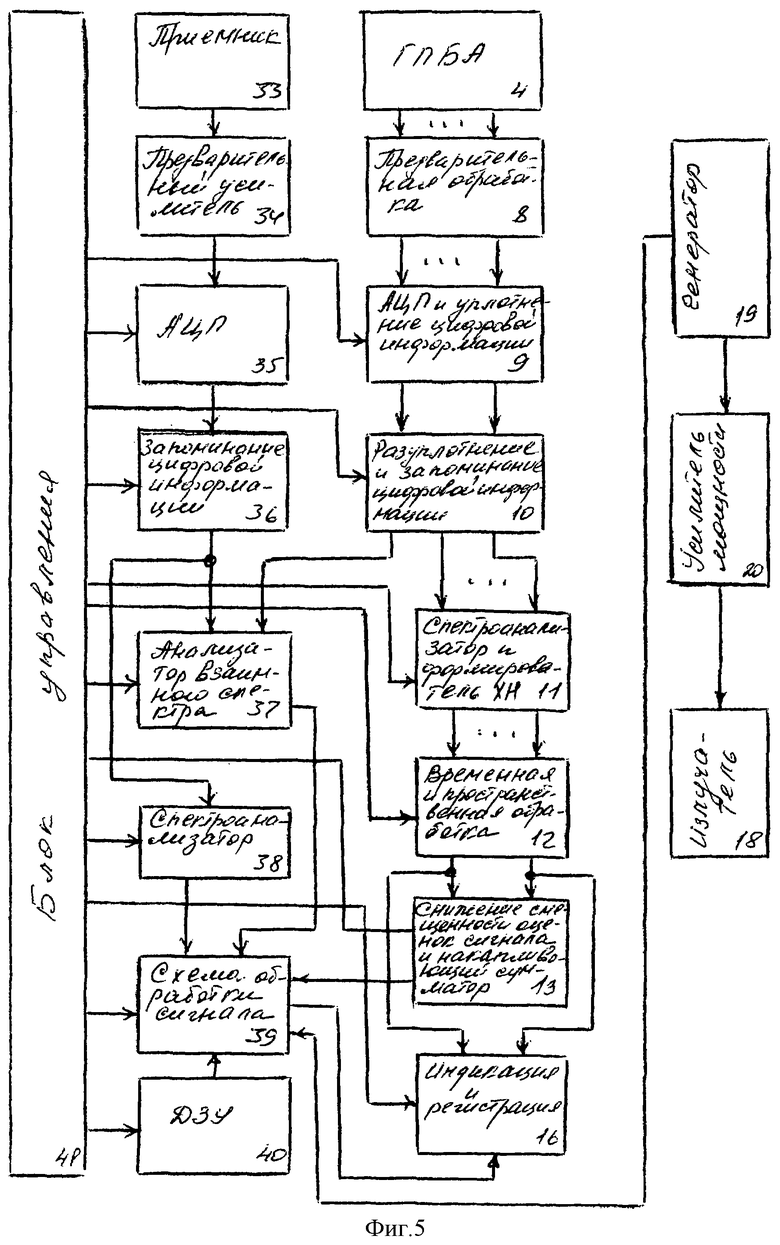
где
Gии(f) - энергетический спектр шумоизлучения вспомогательного излучателя, приведенный к единичному расстоянию, γг(f) - частотная характеристика чувствительности вспомогательного приемника, d - размер активной части излучателя, λв - длина звуковой волны на верхней частоте рабочего диапазона, выделяют взаимный энергетический спектр между шумовыми сигналами на выходах ГПБА и вспомогательного приемника GГПБА, г, и(f), a также энергетический спектр Gг, и(f) на выходе вспомогательного приемника и определяют передаточную функцию среды
выделяют фазовую часть взаимного энергетического спектра θГПБА, г, и(f) из соотношения

определяют расстояние между фазовым центром ГПБА и акустическим центром подводного шумоизлучения подводной лодки R по формуле
перемещают ГПБА по прямой, проходящей через центр ГПБА, а энергетический спектр шумоизлучения определяют при расстоянии Ro между акустическим центром подводного шумоизлучения подводной лодки и фазовым центром ГПБА путем приближения ГПБА к подводной лодке на расстояние
ΔR=R-Roo,
причем при включенном вспомогательном излучателе регистрируют на выходе ГПБА энергетический спектр сигнала от подводного излучения корабля  , очищенный от постоянной составляющей помех, и определяют приведенный к единичному расстоянию энергетический спектр подводного шумоизлучения подводной лодки Gхх(f) с учетом передаточной функции.
, очищенный от постоянной составляющей помех, и определяют приведенный к единичному расстоянию энергетический спектр подводного шумоизлучения подводной лодки Gхх(f) с учетом передаточной функции.
| Авт | |||
| свид | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1982 |
|
SU1840366A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

