Изобретение относится к области квантовой электроники и может найти широкое применение в оптической локации.
Известен способ определения угловых координат цели, включающий подсвет цели, отражение сигнала от цели, фокусировку принятого на апертуре сигнала и определении координат центра тяжести светового пятна в фокальной плоскости измерительной системы, а по ним судят об угловых координатах цели (прототип B.И.Татарский "Распространение волн в турбулентной атмосфере", М.: изд. Наука, 1967 г., стр.388).
Недостатком этого способа является то, что несмотря на "усредняющее" по атмосфере свойство способа как при короткой, так и при длинной экспозиции, как при когерентном, так и при некогерентном подсвете ошибки измерения, обусловленные турбулентной атмосферой, составляют самое малое 1-2 угловые минуты.
Целью настоящего изобретения является повышение точности измерения угловых координат объекта и его распознавания.
Для достижения поставленной цели измеряют составляющие векторов поляризации сигнала, по которым определяют положение плоскости расположения векторов, по положению этой плоскости находят истинное направление прихода сигнала и по нему судят об угловых координатах объекта и наличии неложной цели.
На чертеже приведена общая блок-схема устройства, с помощью которой может быть реализован предложенный способ. Устройство содержит пять поляризаторов, расположенных определенным образом в плоскости апертуры 1, пять фотоприемников 2, вычислительное устройство 3, геометрический анализатор 4 и идентификатор объекта 5.
Излучение от источника (когерентного или некогеретного) подсвета 6, отражаясь от цели 7 и проходя через турбулентною атмосферу, приходит на приемную апертуру, в которой определенным образом установлены пять поляризаторов 1, сигнал, прошедший каждый поляризатор, преобразуется с помощью пяти фотоприемников 2 в электрические пропорциональные по величине составляющим векторов поляризации, эти сигналы поступают в вычислительное устройство, которое по составляющим вычисляет абсолютное значение и положение векторов поляризации, эти данные поступают в геометрический анализатор 4, в котором строится плоскость, проходящая через векторы поляризации, и по ней определяется направление истинного прихода сигнала, а по нему судят об угловых координатах объекта; наконец, сигнал с геометрического анализатора подается на пороговый идентификатор 5, который принимает решение о наличии неложного объекта (спутник, боеголовка и т.д.).
Изобретение основано на том, что лазерный сигнал, облучающий цель обычно линейно поляризован, а при отражении от металлических (шероховатых) поверхностей (это обычно спутники, боевые цели) сигнал приобретает круговую или эллиптическую поляризацию, которую можно представить в виде двух векторов, составляющие которых мы и измеряем. При отражении от цели некогерентного сигнала (например, источник - Солнце) обычно хаотически поляризованного, сигнал также приобретает круговую или эллиптическую поляризацию. Отраженный же от зеркальных целей (это обычно надувные, ложные цели), сигнал не меняет поляризации (Дж.Клаудер, Э.Сударшан. Основы квантовой оптики. М.: Мир, 1970 г., с.21). На этом основана идея распознавания ложных и боевых целей.
До сих пор в оптической локации не использовалась информация, которую несут поляризационные характеристики сигнала о параметрах движения целей. Обычно рассматривалось скалярное поле. Однако известно, что вектор поляризации (обычно представляют в виде двух осциллирующих в одной плоскости) перпендикулярен направлению распространения электромагнитной, в данном случае световой волны, и не меняет своего направления при входе в турбулентную атмосферу (Борн М., Вольф Э. Основы оптики, М.: Наука, 1970 г.), в то время как направление распространения сигнала искажается при прохождении через турбулентную атмосферу за счет регулярной и случайной рефракции. Причем ошибки в направлении угла прихода могут достигать нескольких угловых минут, в то время как современные локаторы требуют точности до долей угловых секунд. Таким образом вектор поляризации несет информацию об угловых координатах, не искаженную турбулентной атмосферой. Ошибка в измерении, обусловленная данным способом измерения, определяется лишь отношением сигнал/шум.
Пусть поле (векторное) в точке  апертуры в момент времени t имеет вид:
апертуры в момент времени t имеет вид:

где:  - вектор поляризации;
- вектор поляризации;

 - вектора, составляющие вектора поляризации возможность измерить скалярные составляющие которых, как следует из анализа, можно с помощью пяти поляризаторов;
- вектора, составляющие вектора поляризации возможность измерить скалярные составляющие которых, как следует из анализа, можно с помощью пяти поляризаторов;
ωо - частота сигнала;
 - координаты цели;
- координаты цели;
 - вектор в плоскости апертуры;
- вектор в плоскости апертуры;
R - расстояние до цели;
С - скорость света;
 - флуктуации (фазовые) турбулентной атмосферы;
- флуктуации (фазовые) турбулентной атмосферы;
 - пространственно-временной белый шум.
- пространственно-временной белый шум.
Записывая функционал, находя его параметры (Бакут П.А. и др. "Вопросы статистической теории радиолокации", М.: Сов. радио, 1966 г.) и вычисляя матрицу ошибок в случае, если объект расположен на оси оптической системы  , получаем:
, получаем:
где: q - отношение сигнал/шум;
 - функция, зависящая от свойств поляризаторов (меняется в пределах от 1 до 7).
- функция, зависящая от свойств поляризаторов (меняется в пределах от 1 до 7).
Таким образом, из (2) видно, что, увеличивая отношение сигнал/шум, можно достичь высокой точности с помощью применения предлагаемого способа (до 0,01").
Перечисленные преимущества предложенного способа повышают надежность и эффективность работы систем оптической локации.
Использование предложенного способа позволило повысить точность определения угловых координат объекта в реальном масштабе времени и сократить время на селекцию целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ОПТИЧЕСКОЙ ЛОКАЦИИ | 1979 |
|
SU1840554A1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| Способ обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2742139C1 |
| СПОСОБ КОМПЛЕКСНОЙ ЛОКАЦИИ ЦЕЛИ | 2009 |
|
RU2416108C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА, НАБЛЮДАЕМОГО ЧЕРЕЗ ТУРБУЛЕНТНУЮ АТМОСФЕРУ | 1979 |
|
SU1840449A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ОБЪЕКТОВ | 1980 |
|
SU1840343A1 |
| Способ формирования изображения удаленного малоразмерного объекта | 1990 |
|
SU1764011A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
| СИСТЕМА ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2540451C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124740C1 |
Изобретение относится к оптической локации. Технический результат заключается в повышении точности определения угловых координат и распознавания объекта. Сущность изобретения состоит в том, что в способе определения угловых координат и распознавания объекта, наблюдаемого через турбулентную среду, основанном на подсвете объекта оптическим излучением и приеме отраженных сигналов, измеряют составляющие векторов поляризации отраженного сигнала, по которым определяют положение плоскости расположения векторов поляризации. По положению этой плоскости определяют направление прихода отраженного сигнала, по которому судят об угловых координатах объекта и принимают решение о наличии неложного объекта. 1 ил.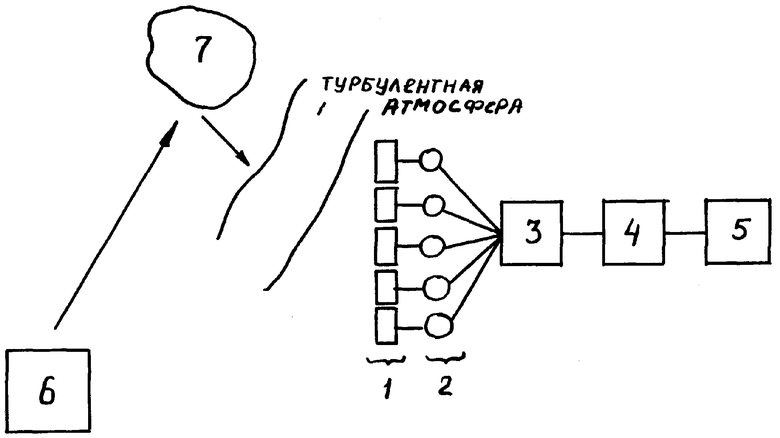
Способ определения угловых координат и распознавания объекта в оптической локации, наблюдаемого через турбулентную среду, путем подсвета объекта, приема от него отраженных сигналов и извлечении из них информации, отличающийся тем, что, с целью повышения точности определения угловых координат и распознавания объекта, измеряют составляющие векторов поляризации отраженного сигнала, определяют положение плоскости расположения векторов поляризации и по положению этой плоскости извлекают информацию о направлении прихода отраженного сигнала и по нему судят об угловых координатах объекта и его распознавании как несложного объекта.
| Пат | |||
| США №3772689 кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

