Изобретение относится к области лазерной локации, системам наблюдения и квантовой электронике. Изобретение предназначено для использования в наземных стационарных системах лазерной локации и оптико-электронного контроля окружающего пространства и обеспечивает обнаружение оптических и оптико-электронных систем наблюдения в контролируемой области пространства (КОП), а также обнаружение систем активного наблюдения и противодействие этим системам, ведущим лазерную разведку с использованием подсвета лазерным излучением (ЛИ), с использованием лазерных прицелов, а также устройств постановки помех на основе лазерного излучения и лазерного воздействия. Изобретение может быть использовано для противодействия террористам, ведущим наблюдение, прицеливание и постановку помех с помощью оптико-электронных и лазерных приборов.
Известно оптико-электронное устройство по патенту Франции [1], содержащее передающий канал с лазерным источником подсвета и оптической формирующей системой, приемный канал, содержащий фотоприемный блок, приемный объектив, светоделитель, блок управления. К недостаткам данного устройства следует отнести низкую помехоустойчивость по отношению к внешним активным организованным помехам в виде лазерного излучения, воздействующего на приемный канал данного устройства при наличии в контролируемой устройством зоне пространства наблюдения оптико-электронных и лазерных аппаратов, ведущих встречную разведку и наблюдение с помощью средств активного лазерного подсвета. При попадании на вход приемного канала данного устройства лазерного излучения (ЛИ) от внешнего лазерного устройства, ведущего встречное наблюдение или помеховое активное воздействие, данное устройство становится неработоспособным или существенно ухудшает свои характеристики. Известна лазерная система обнаружения оптико-электронных приборов по патенту Англии [2], содержащая частотно-импульсный лазер с объективом, фотоприемный блок с приемным объективом, блок памяти и управления. К недостаткам данного устройства следует отнести низкую помехоустойчивость по отношению к внешним лазерным излучениям, создаваемым оптико-электронными и лазерными локационными системами, ведущими встречную активную разведку и наблюдение. Известно устройство определения угловых координат источника импульсного лазерного излучения по патенту РФ [3], содержащее широкоугольный объектив, фотоприемный блок на основе фотодиода, светочувствительную матрицу, блок управления, интерфейс обмена. К недостаткам данного устройства следует отнести низкую информативность по отношению к обнаруженному источнику импульсного лазерного излучения. Отсутствует возможность определения таких важных параметров, как дальность до источника лазерного излучения, длина волны источника лазерного излучения, что необходимо для организации противодействия обнаруженному источнику излучения. Обнаружение источника излучения возможно только в видимом диапазоне длин волн, в то время как современные системы автоматического оптико-электронного активного лазерного наблюдения и прицеливания работают одновременно в видимом и инфракрасном диапазонах. Отсутствует возможность защиты фотоприемного канала от воздействующего внешнего помехового лазерного излучения и возможность вести оптико-электронную разведку при наличии указанного внешнего лазерного излучения. В качестве прототипа выбрано устройство обнаружения оптических и оптоэлектронных средств наблюдения по патенту РФ [4], которое содержит два приемных канала и один передающий канал на основе лазерного генератора видимого диапазона длин волн. Один из приемных каналов осуществляет прием естественного фонового излучения, второй приемный канал осуществляет прием отраженного лазерного излучения. Устройство содержит блок сканирования, два приемных объектива, два фотоприемных блока, блок управления, формирователь видеосигнала, блок задержки, электронно-оптический преобразователь, частотно-импульсный лазер. К недостаткам данного устройства следует отнести низкую помехоустойчивость при воздействии на данное устройство лазерного излучения, наличие которого обусловлено оптико-электронными и лазерными локационными системами, ведущими встречное активное наблюдение или прицеливание с использованием достаточно интенсивного лазерного излучения для подсвета места нахождения данного устройства. При наличии такого лазерного излучения на оптических входах обеих приемных каналов данное известное устройство существенно ухудшает свои обнаружительные характеристики или вообще становится неработоспособным, особенно если учесть факт значительного превышения интенсивности облучающего лазерного помехового сигнала по сравнению с уровнем интенсивности принимаемого лазерного информационного сигнала, отраженного от наблюдаемого объекта. Этот недостаток обусловлен тем, что в данном известном устройстве не предусмотрены средства для предотвращения воздействия на приемные каналы помехового лазерного излучения с длиной волны, соответствующей рабочей длине волны лазерного генератора и длине волны пропускания интерференционного и отрезающего фильтров. Соответственно при наличии лазерной помеховой засветки или засветки от лазерного прицела в данном устройстве отсутствует возможность осуществления эффективного обнаружения и распознавания объектов в контролируемой области пространства, что равносильно потере работоспособности устройства. Другим недостатком данного устройства является низкая эффективность обнаружения и невозможность распознавания наблюдаемых оптических и оптико-электронных объектов и приборов. Это обусловлено малой информативностью процесса обнаружения наблюдаемых объектов в данном устройстве, в котором обнаружение осуществляется в единственном узком спектральном диапазоне длин волн по одному признаку - величине интенсивности отраженного импульсного лазерного излучения.
В предлагаемой системе лазерной локации решена задача повышения помехоустойчивости приема лазерных локационных сигналов в видимом и инфракрасном диапазонах длин волн при наличии помехового воздействия от лазерных локационных систем и оптико-электронных устройств, ведущих встречное наблюдение, прицеливание и разведку в активном режиме с использованием подсвечивающего лазерного излучения, а также осуществляющих специальное помеховое воздействие лазерным излучением на приемные каналы системы лазерной локации. В предлагаемой системе лазерной локации реализована возможность эффективного обнаружения и распознавания оптических и оптико-электронных приборов, находящихся в контролируемой области пространства, при наличии помехового лазерного воздействия от систем лазерной локации, ведущих встречное наблюдение и активную лазерную разведку. Для решения указанной проблемы в предлагаемой системе лазерной локации осуществляется обнаружение лазерного излучения от источников лазерного излучения, находящихся в контролируемой области пространства. Одновременно осуществляется определение длины волны помехового лазерного воздействия и определение его угловых координат. Далее на основании полученной информации осуществляется смещение длины волны приема узкополосного спектрального перестраиваемого фильтра, установленного на входе фотоприемного блока в предлагаемой системе лазерной локации, на такую величину, чтобы исключить влияние обнаруженного помехового лазерного воздействия на указанный фотоприемный блок. Одновременно осуществляется соответствующее смещение длины волны генерируемого лазерного излучения, обеспечивающего подсвет контролируемой области пространства. В результате приема отраженного от КОП лазерного излучения определяется дальность до обнаруженного источника ЛИ, а также отражательные характеристики обнаруженного объекта. В предлагаемой системе лазерной локации осуществляется более точное определение длины волны обнаруженного источника лазерного излучения и при необходимости осуществляется помеховое воздействие лазерным излучением на источник ЛИ точно на измеренной длине волны обнаруженного лазерного излучения. Кроме этого обнаружение объектов в контролируемой области пространства в предлагаемой системе лазерной локации осуществляется в широком спектральном диапазоне в видимом и в инфракрасном диапазонах длин волн, для чего используются лазерные генераторы с перестройкой длины волны генерации и перестраиваемые спектральные фильтры. Это обеспечивает повышение информативности предлагаемой системы, увеличение эффективности обнаружения и повышение вероятности распознавания наблюдаемых оптико-электронных приборов и средств наблюдения и активной разведки.
Достигаемым новым техническим результатом является повышение помехоустойчивости работы системы лазерной локации в условиях воздействия помехового лазерного излучения, производимого системами лазерной локации и оптико-электронными средствами, ведущими встречное наблюдение, разведку и прицеливание с помощью активных лазерных средств, увеличение эффективности обнаружения и вероятности распознавания оптических и оптико-электронных приборов в условиях непосредственного действия организованных оптических помех от лазерных систем прицеливания и лазерного воздействия.
Указанный технический результат достигается следующим.
1. В системе лазерной локации, содержащей блок сканирования с блоком управления, установленные на первой оптической оси оптически связанные первый приемный объектив, первый фотоприемный блок, установленные на шестой оптической оси оптически связанные второй приемный объектив, шестой фотоприемный блок, установленные на восьмой оптической оси оптически связанные первый формирователь лазерного пучка, первый лазерный генератор с блоком управления, подключенный к блоку управления системой, оптический вход второго приемного объектива посредством отражательного зеркала связан с блоком сканирования, оптический выход первого формирователя лазерного пучка посредством отражательного зеркала оптически связан с блоком сканирования, введены пять фотоприемных блоков, восемь блоков регистрации сигналов, третий приемный объектив, семь управляемых оптических фильтров, десять линз, четыре спектральных перестраиваемых фильтра, дифракционная оптическая решетка, блок обработки локационных сигналов, второй лазерный генератор с блоком управления, второй формирователь лазерного пучка, два дефлектора лазерного излучения, блок контрольных отражателей, при этом на первой оптической оси последовательно установлены между первым приемным объективом и первым фотоприемным блоком оптически связанные первая линза, первый управляемый оптический фильтр, дифракционная оптическая решетка и вторая линза, на второй оптической оси последовательно установлены оптически связанные третья линза, второй управляемый оптический фильтр и второй фотоприемный блок, оптический вход третьей линзы посредством двух полупрозрачных зеркал связан с выходом первого приемного объектива, на третьей оптической оси последовательно установлены оптически связанные четвертая линза, третий управляемый оптический фильтр и третий фотоприемный блок, оптический вход четвертой линзы посредством двух полупрозрачных зеркал связан с выходом первого приемного объектива, на четвертой оптической оси последовательно установлены оптически связанные пятая линза, первый спектральный перестраиваемый фильтр, шестая линза, четвертый управляемый оптический фильтр и четвертый фотоприемный блок, оптический вход пятой линзы посредством двух полупрозрачных зеркал связан с выходом первого приемного объектива, на пятой оптической оси последовательно установлены оптически связанные седьмая линза, второй спектральный перестраиваемый фильтр, восьмая линза, пятый управляемый оптический фильтр и пятый фотоприемный блок, оптический вход седьмой линзы посредством отражательного и полупрозрачного зеркал связан с выходом первого приемного объектива, на шестой оптической оси последовательно установлены между вторым приемным объективом и шестым фотоприемным блоком оптически связанные третий спектральный перестраиваемый фильтр, девятая линза и шестой управляемый оптический фильтр, на седьмой оптической оси последовательно установлены оптически связанные третий приемный объектив, четвертый спектральный перестраиваемый фильтр, десятая линза, седьмой управляемый оптический фильтр и седьмой фотоприемный блок, оптический вход третьего приемного объектива посредством отражательного зеркала связан с блоком сканирования, первый дефлектор лазерного излучения расположен на восьмой оптической оси между первым формирователем лазерного пучка и первым лазерным генератором, на девятой оптической оси последовательно расположены оптически связанные второй формирователь лазерного пучка, второй дефлектор лазерного излучения и второй лазерный генератор, подключенный к блоку управления вторым лазерным генератором, оптический выход второго формирователя лазерного пучка посредством отражательного зеркала связан с блоком сканирования, выходы первого фотоприемного блока подсоединены ко входам первого и второго блоков регистрации сигналов, выходы фотоприемных блоков от второго до седьмого включительно подключены к соответствующим входам блоков регистрации сигналов от третьего до седьмого включительно, выходы блоков регистрации сигналов подключены ко входам блока обработки локационных сигналов, выход которого подключен ко входу блока управления системой, управляющие входы управляемых оптических фильтров подключены к блоку управления системой, управляющие входы спектральных перестраиваемых фильтров подключены к блоку управления системой, управляющие входы первого и второго дефлекторов лазерного излучения подключены к блоку управления системой.
2. В системе лазерной локации по пункту 1 блок контрольных отражателей содержит устройство перемещения, платформу с расположенными на ней уголковым и диффузным отражателями лазерного излучения.
3. В системе по пункту 1 первый и второй лазерные генераторы выполнены на основе лазеров видимого и инфракрасного диапазонов длин волн с возможностью перестройки длин волн генерируемых лазерных излучений.
4. В системе по пункту 1 первый фотоприемный блок выполнен на основе двух фотоприемных линеек видимого и инфракрасного диапазонов длин волн, расположенных совместно в фокальной плоскости второй линзы, выходы которых подсоединены ко входам соответственно первого и второго блоков регистрации сигналов.
5. В системе по пункту 1 второй и последующие фотоприемные блоки выполнены на основе многоэлементных двумерных фотоприемных матриц видимого и инфракрасного диапазонов длин волн.
6. В системе по пункту 1 спектральные перестраиваемые фильтры выполнены на основе акустооптической перестраиваемой ячейки, в которой возбуждены ультразвуковые волны, взаимодействующие с принимаемым лазерным излучением.
7. В системе по пункту 1 спектральные перестраиваемые фильтры выполнены на основе квантового (лазерного) усилителя - активного квантового фильтра, перестраиваемого по величине длины волны узкополосной фильтрации с помощью магнитного поля.
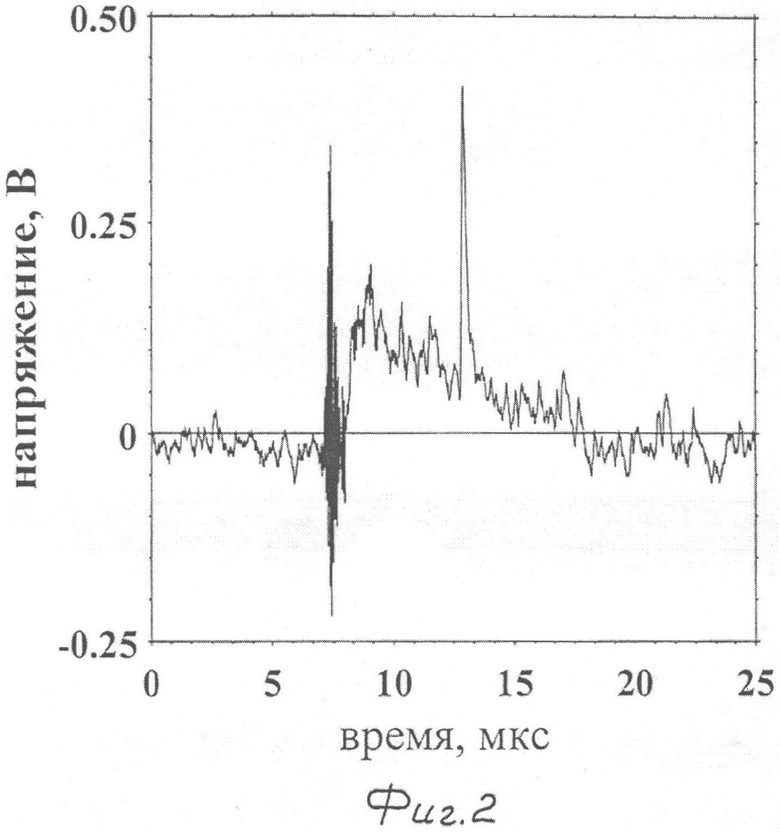
Сущность изобретения поясняется схемой системы лазерной локации, приведенной на фиг.1. На фиг.2 представлена осциллограмма по результатам проведенных исследований экспериментального образца системы лазерной локации.
На фиг.1 в блок-схеме системы лазерной локации цифрами обозначены следующие элементы.
1. Первый приемный объектив.
2. Первая линза.
3. Первый управляемый оптический фильтр.
4. Дифракционная оптическая решетка.
5. Вторая линза.
6. Первая фотоприемная линейка.
7. Вторая фотоприемная линейка. Первая и вторая фотоприемные линейки образуют первый фотоприемный блок.
8. Первый блок регистрации сигналов.
9. Второй блок регистрации сигналов.
10. Третья линза.
11, 15, 21, 27, 33, 39 - второй-седьмой управляемые оптические фильтры.
12. Второй фотоприемный блок.
13. Третий блок регистрации сигналов.
14, 18, 20, 24, 26 - четвертая-восьмая линзы.
16. Третий фотоприемный блок.
17. Четвертый блок регистрации сигналов.
19. Первый спектральный перестраиваемый фильтр.
22. Четвертый фотоприемный блок.
23. Пятый блок регистрации сигналов.
25. Второй спектральный перестраиваемый фильтр.
28. Пятый фотоприемный блок.
29. Шестой блок регистрации сигналов.
30. Второй приемный объектив.
31. Третий спектральный перестраиваемый фильтр.
32. Девятая линза.
34. Шестой фотоприемный блок.
35. Седьмой блок регистрации сигналов.
36. Третий приемный объектив.
37. Четвертый спектральный перестраиваемый фильтр.
38. Десятая линза.
40. Седьмой фотоприемный блок.
41. Восьмой блок регистрации сигналов.
42. Первый формирователь лазерного пучка.
43. Первый дефлектор лазерного излучения.
44. Первый лазерный генератор с блоком управления 45.
46. Второй формирователь лазерного пучка.
47. Второй дефлектор лазерного излучения.
48. Второй лазерный генератор с блоком управления 49.
50. Блок обработки локационных сигналов.
51. Блок управления системой.
52. Блок сканирования с блоком управления 53.
54. Блок контрольных отражателей.
55. Диффузный отражатель.
56. Уголковый отражатель.
57-60 - полупрозрачные зеркала.
61-65 - отражательные зеркала.
66. Объект наблюдения и активной лазерной разведки.
На фиг.1 нумерация оптических осей осуществляется сверху вниз от первой до девятой оптической оси.
Принцип действия системы лазерной локации заключается в следующем.
Система лазерной локации (далее - система) содержит две функционально связанные части. Первая часть системы, оптическим входом которой является первый приемный объектив поз.1, осуществляет пассивный прием оптического излучения, которым облучается система из контролируемой области пространства (КОП) находящимися там приборами и средствами активной лазерной разведки поз.66 на фиг.1. Вторая часть системы, оптическим входом и выходом которой является блок сканирования 52, осуществляет подсвет контролируемой области пространства лазерным излучением от двух лазерных генераторов видимого и инфракрасного диапазонов длин волн и прием и обработку лазерного излучения, отраженного от находящихся в КОП объектов, оптических и оптоэлектронных средств наблюдения. Элементы первой части системы лазерной локации, расположенные на оптических осях от первой до пятой, образуют пять пассивных каналов приема облучающего лазерного излучения. Элементы второй части системы расположены на оптических осях от шестой до девятой и содержат два канала приема отраженного от КОП лазерного излучения (шестая и седьмая оптические оси) и два лазерных передающих канала (восьмая и девятая оптические оси).
Первая часть системы осуществляет непрерывный прием оптического излучения, облучающего систему лазерной локации, в видимом и инфракрасном диапазонах длин волн. Первоначально в момент времени приема первой частью системы облучающего оптического излучения из области КОП от активных приборов встречной разведки вторая часть системы находится в ждущем режиме и не осуществляет подсвета КОП и приема отраженного от КОП лазерного излучения. Прием облучающего оптического излучения осуществляется посредством первого приемного объектива 1, в качестве которого использован специальный широкоугольный объектив, работающий в видимом и ИК-диапазонах длин волн. Далее из принятого оптического (лазерного) излучения с помощью первых пяти фотоприемных блоков поз.6, 7, 12, 16, 22, 28 определяется длина волны лазерного излучения, которым осуществлено облучение системы, а также осуществляется определение угловых координат источника облучающего лазерного излучения, находящегося в области КОП, и определение момента времени прихода импульса облучающего лазерного излучения на вход первого приемного объектива. Изображение контролируемого объема (области) пространства с выхода первого приемного объектива 1 (фокальной плоскости объектива 1) полупрозрачными зеркалами (поз.57-60) разделяется на пять идентичных составляющих (копий), которые поступают на оптические входы линз поз.2, 10, 14, 18 и 24. Сформированные пять копий принятых приемным объективом 1 оптических излучений используются для извлечения указанной информации из принятого облучающего лазерного излучения. Следует отметить, что поступающее на оптический вход (приемную апертуру) первого приемного объектива 1 облучающее лазерное излучение представляет собой лазерный импульс достаточно большой интенсивности, значительно превосходящий чувствительность используемых в предлагаемой системе лазерной локации фотоприемных блоков. Высокая интенсивность в облучающем систему лазерном импульсе обусловлена тем, что данный импульс рассчитан на получение на его основе отраженного от конструкций системы лазерного излучения и приеме этого отраженного излучения на значительном расстоянии его обратного распространения приемными средствами оптико-электронного прибора, ведущего встречное активное наблюдение или лазерное прицеливание. Поэтому разделение принятого приемным объективом 1 излучения на пять копий указанными выше полупрозрачными зеркалами практически не уменьшает потенциала приемных пассивных каналов предлагаемой системы лазерной локации. Для защиты фотоприемных блоков от принимаемого облучающего лазерного излучения сравнительно высокой интенсивности используются пять управляемых оптических фильтров поз.3, 11, 15, 21, 27, установленные совместно с соответствующими линзами.
Далее рассмотрим функции, выполняемые каждым из указанных пяти пассивных приемных каналов предлагаемой системы. Первый пассивный приемный канал, состоящий из расположенных на первой оптической оси элементов поз.2-7, осуществляет измерение длины волны импульса лазерного излучения, облучающего систему лазерной локации и принятого приемным объективом 1. Линза 2 переносит выходную фокальную плоскость приемного объектива 1 в плоскость дифракционной оптической решетки 4, которая осуществляет разложение принятого лазерного излучения в линейный спектр. Вторая линза 5 переносит сформированный оптический спектр в плоскость фотоприемных линеек 6 и 7, расположенных на одной линии в фокальной плоскости линзы 5. Сформированный дифракционной оптической решеткой 4 оптический спектр принятого импульса лазерного излучения представляет собой развернутое в линию распределение интенсивности излучения, в котором длина волны излучения соответствует координате всплеска интенсивности вдоль образующей прямой фотоприемных линеек 6 и 7. Фотоприемная линейка 6 обладает чувствительностью в видимом диапазоне и осуществляет прием и регистрацию распределения излучения видимого диапазона длин волн. Соответственно, фотоприемная линейка 7 обладает чувствительностью в инфракрасном диапазоне длин волн и осуществляет прием и регистрацию распределения излучения ИК-диапазона длин волн. (Практически в ближнем ИК-диапазоне). Принятое приемным объективом 1 облучающее систему лазерное излучение представляет собой короткий импульс оптического излучения видимого или ИК-диапазона длин волн. Соответственно этому фотоприемные линейки 6 и 7 регистрируют короткий импульс оптического излучения, положение которого (линейная координата) вдоль образующей прямой фотоприемных линеек 6 и 7 соответствует длине волны принятого импульса излучения в видимом или ИК-диапазоне. Таким образом, номер чувствительной ячейки в фотоприемных линейках 6 и 7, в которых зарегистрирован импульс оптического излучения, характеризует длину волны этого излучения. Электрические выходы фотоприемных линеек 6 и 7 параллельно подключены к первому 8 и ко второму 9 блокам регистрации сигналов. В данных блоках осуществляется усиление сигналов с выходов ячеек фотоприемных линеек 6 и 7, их оцифровка и буферное запоминание на короткое время в соответствующих регистрах памяти блоков 8 и 9. Далее информация о принятых оптических импульсах излучения, их амплитуде и номере фоточувствительной ячейки в фотоприемной линейке 6 и 7 поступает в цифровой форме через соответствующие интерфейсы в блок обработки локационных сигналов 50. В результате в блоке 50 образуется и регистрируется информация о приеме импульса лазерного излучения, облучившего приемный объектив системы лазерной локации, а также информация о параметрах этого излучения в виде длины волны излучения в видимом или ИК-диапазоне - по номеру фоточувствительной ячейки в фотоприемных линейках 6 и 7. Полученная информация о параметрах лазерного излучения, облучающего систему лазерной локации, далее оперативно используется для изменения режима работы системы, что будет изложено ниже. Одновременно с определением длины волны облучающего лазерного излучения в канале пассивного приема излучения осуществляется определение угловых координат источника облучающего лазерного излучения. Эту функцию определения угловых координат источника облучающего лазерного излучения осуществляют второй фотоприемный блок поз.12 для источников видимого диапазона длин волн и третий фотоприемный блок поз.16 для источников инфракрасного диапазона длин волн. Указанные фотоприемные блоки 12, 16 выполнены на основе многоэлементных фотоприемных матриц видимого и ИК-диапазонов длин волн соответственно. Линзы 10 и 14 осуществляют перенос фокальной плоскости приемного объектива 1 в плоскость фоточувствительных площадок фотоприемных блоков 12 и 16 соответственно. Электрические сигналы с выходов чувствительных элементов фотоприемных блоков 12, 16 поступают в блоки регистрации сигналов 13, 17, в которых осуществляется усиление, оцифровка и буферное запоминание сигналов, которые далее поступают через соответствующие интерфейсы в блок обработки локационных сигналов 50. В результате в блоке 50 образуется информация об угловых координатах источника облучающего лазерного излучения, параллельно с информацией о длине волны этого источника, которая была измерена с помощью дифракционной оптической решетки и первого фотоприемного блока. Угловые координаты источника облучающего лазерного излучения определяются по координатам чувствительных элементов в приемной плоскости фотоприемных блоков 12, 16. Полученная информация также оперативно используется для изменения режима работы системы лазерной локации. После однократного определения угловых координат и длины волны источника облучающего лазерного излучения осуществляется более точное определение длины волны облучающего лазерного излучения с помощью первого спектрального перестраиваемого фильтра 19 и четвертого фотоприемного блока 22 в видимом диапазоне длин волн и с помощью второго спектрального перестраиваемого фильтра 25 и пятого фотоприемного блока 28 в инфракрасном диапазоне длин волн. Необходимость более точного определения длины волны облучающего лазерного излучения обусловлена тем, что оперативное определение длины волны посредством дифракционной оптической решетки 4 и первого фотоприемного блока поз.6 и 7 обладает ограниченной точностью, определяемой функцией рассеивания оптической системы из первого приемного объектива 1 и двух линз 2 и 5, а также размером одной фоточувствительной ячейки (пикселя) фотоприемных линеек 6 и 7. В то же время определение длины волны с помощью указанных средств обладает преимуществом оперативности и позволяет определить длину волны облучающего лазерного излучения непосредственно в момент прихода первого импульса этого излучения на входную апертуру приемного объектива 1. Более точное определение длины волны облучающего лазерного излучения с помощью указанных средств осуществляется следующим образом. Выходная фокальная плоскость первого приемного объектива 1 с помощью линзы 18 и линзы 20 переносится в плоскость фоточувствительной приемной площадки четвертого фотоприемного блока поз.22. При этом переносе в параллельном ходе лучей анализируемое излучение проходит через рабочую зону первого спектрального перестраиваемого фильтра 19. Последний представляет собой акустооптический кристалл, в котором под воздействием управляющих сигналов возбуждаются акустические волны, взаимодействие которых с проходящим анализируемым излучением обеспечивает пропускание излучения в узком спектральном диапазоне. При изменении параметров управляющего электрического сигнала длина волны узкой полосы спектрального пропускания спектрального перестраиваемого фильтра изменяется (смещается) в пределах некоторого диапазона в видимом диапазоне длин волн в спектральном перестраиваемом фильтре 19 и в инфракрасном диапазоне длин волн в спектральном перестраиваемом фильтре 25. Аналогично линзы 24 и 26 осуществляют перенос фокальной плоскости приемного объектива 1 в плоскость фоточувствительной площадки фотоприемного блока 28 в инфракрасном диапазоне длин волн через рабочую зону второго спектрального перестраиваемого фильтра 25. Под воздействием управляющих электрических сигналов, поступающих от блока управления системой 51 на управляющий вход спектрального перестраиваемого фильтра 19, а также на управляющий вход спектрального перестраиваемого фильтра 25, в указанных фильтрах осуществляется перемещение (сканирование) положения узкой полосы пропускания в пределах некоторого диапазона длин волн, соответствующего измеренной длине волны облучающего источника лазерного излучения, полученной в результате функционирования дифракционной оптической решетки 4 и первого фотоприемного блока 6, 7. При непрерывном сканировании по длине волны полосы пропускания в спектральном перестраиваемом фильтре 19 и в спектральном перестраиваемом фильтре 25 осуществляется непрерывная регистрация изображения выходной фокальной плоскости первого приемного объектива 1 с помощью четвертого фотоприемного блока 22 в видимом диапазоне длин волн и в инфракрасном диапазоне длин волн с помощью пятого фотоприемного блока 28. Следует отметить, что фотоприемные блоки 22, 12 видимого диапазона длин волн идентичны между собой. Аналогично идентичны фотоприемные блоки 16, 28 инфракрасного диапазона длин волн. Электрические сигналы с выходов фотоприемных блоков 22, 28 поступают в блоки регистрации сигналов 23, 29 и далее в цифровой форме в блок обработки локационных сигналов 50. В результате в блоке 50 образуется и регистрируется информация об интенсивностях зарегистрированных сигналов от источника облучающего лазерного излучения при различных положениях узкой спектральной полосы пропускания спектральных перестраиваемых фильтров 19 и 25 в диапазоне спектральной перестройки под воздействием управляющих электрических сигналов. В блоке обработки локационных сигналов 50 осуществляется анализ интенсивностей (уровней) зарегистрированных сигналов с выходов фотоприемных блоков 22, 28, при этом сигнал наибольшего уровня соответствует точной величине длины волны облучающего лазерного излучения в видимом диапазоне длин волн (фотоприемный блок 22) или в инфракрасном диапазоне длин волн (фотоприемный блок 28). Информация о параметрах облучающего лазерного излучения, полученная и зарегистрированная в блоке обработки локационных сигналов 50, содержащая параметры длины волны облучающего лазерного излучения и угловые координаты источника облучающего лазерного излучения, используется далее для оперативного изменения режима работы системы лазерной локации. При этом параметры длины волны облучающего лазерного излучения получены в двух видах. Во-первых, в предварительном виде по измерениям первого поступившего импульса лазерного излучения с помощью дифракционной оптической решетки и первого фотоприемного блока 6, 7. Во-вторых, в более точном виде при осуществлении измерений с помощью двух спектральных перестраиваемых фильтров 19, 25, которые в этом случае работают в качестве высокоточных спектроанализаторов видимого и инфракрасного диапазонов длин волн. Следует отметить, что измерение длины волны облучающего лазерного излучения в более точном виде возможно только в том случае, если источник облучающего лазерного излучения или лазерного прицеливания продолжает свою работу в течение некоторого короткого промежутка времени, достаточного для осуществления сканирования некоторого диапазона длин волн спектральным перестраиваемым фильтром в районе длины волны лазерного излучения, измеренной по первому импульсу излучения с помощью дифракционной оптической решетки и первого фотоприемного блока. Если облучающее лазерное излучение зарегистрировано только в виде одного единственного первого лазерного импульса излучения, то изменение режима работы системы лазерной локации осуществляется по параметрам, полученным в результате измерения этого единственного импульса. В блоке обработки локационных сигналов 50 образуется также информация об уровнях интенсивности принятого облучающего лазерного излучения, определение которой осуществляется на основании уровней электрических сигналов, поступающих в блок 50 с выходов блоков регистрации сигналов 8, 9, 13, 17, 23, 29. Следует отметить, что по величинам измеренной интенсивности уровня принятого облучающего лазерного излучения осуществляется подстройка уровня пропускания в управляемых оптических фильтрах поз.3, 11, 15, 21, 27, 33 и 39. Данные управляемые оптические фильтры служат для защиты фотоприемных блоков от интенсивного облучающего лазерного излучения и для обеспечения оптимального режима работы фотоприемных блоков по уровню их чувствительности в соответствующих диапазонах длин волн. Управление уровнем пропускания указанных фильтров осуществляется по сигналам, поступающим на фильтры от блока управления системой 51, в который от блока обработки локационных сигналов 50 поступает информация о необходимом уровне пропускания и изменении этого уровня пропускания для каждого управляемого фильтра на основании измеренных в блоке 50 величинах уровня интенсивности облучающего лазерного излучения в видимом, или в инфракрасном диапазоне длин волн. Следует отметить, что управляемые оптические фильтры поз.3, 11, 15 могут быть использованы для дополнительной временной модуляции проходящего и принимаемого оптического излучения с некоторой частотой, задаваемой управляющими сигналами с выхода блока управления системой 51. При такой модуляции возникает возможность приема и определения длины волны и угловых координат источников облучающего непрерывного излучения, осуществляющих непрерывную помеховую засветку системы лазерной локации в видимом или инфракрасном диапазоне длин волн. При осуществлении такой модуляции непрерывного облучающего и принимаемого объективом 1 помехового излучения фотоприемные блоки 6, 7 и 12, 16 регистрируют оптические сигналы, промодулированные известной частотой, что обеспечивает возможность реализации высокой чувствительности приема таких сигналов и точность в определении длины волны и угловых координат источника непрерывного облучающего помехового излучения.
После осуществления измерения параметров облучающего систему лазерного излучения система лазерной локации переходит в режим активной локации и обнаружения объектов в контролируемой области пространства. На основании полученной информации о длине волны облучающего лазерного излучения в видимом диапазоне длин волн в третьем спектральном перестраиваемом фильтре 31 осуществляется установление длины волны полосы пропускания фильтруемого принимаемого излучения на некотором расстоянии по длине волны от величины измеренной длины волны облучающего лазерного излучения. Данные операции осуществляются также для инфракрасного диапазона длин волн с помощью четвертого спектрального перестраиваемого фильтра 37 в случае, если обнаружено облучающее лазерное излучение в инфракрасном диапазоне длин волн и произведено соответствующее измерение длины волны этого излучения представленным выше методом. Смещение длины волны полосы пропускания спектрального перестраиваемого фильтра 31 (или 37) выбирается таким, чтобы обеспечить существенное подавление облучающего лазерного излучения после его прохождения через спектральный перестраиваемый фильтр 31 (или 37) и свести до минимума или исключить воздействие этого излучения на фотоприемный блок 34 (и фотоприемный блок 40 ИК-диапазона). Управление смещением и установлением длины волны пропускания перестраиваемых спектральных фильтров 31 и 37 осуществляется по управляющим сигналам, поступающим на указанные фильтры от блока управления системой 51. В блок управления системой 51 от блока обработки локационных сигналов 50 поступает соответствующая информация о величине длины волны облучающего лазерного излучения и о величине необходимого смещения длины волны полосы пропускания спектрального перестраиваемого фильтра 31 или фильтра 37 относительно измеренной величины длины волны облучающего лазерного излучения. Данная величина смещения длины волны полосы пропускания спектрального перестраиваемого фильтра 31 и 37 рассчитывается в блоке обработки локационных сигналов 50 по специальной программе на основании полученных значений измеренной величины длины волны облучающего лазерного излучения. При этом, как было отмечено выше, используется точное значение длины волны облучающего лазерного излучения, измеренное с помощью первого спектрального перестраиваемого фильтра 19 или измеренное с помощью второго спектрального перестраиваемого фильтра 25 в ИК-диапазоне, при продолжающемся облучении системы внешним лазерным излучением. При однократном облучении системы внешним лазерным излучением используется информация о длине волны облучающего лазерного излучения, измеренная с помощью дифракционной оптической решетки 4 и первого фотоприемного блока 6, 7. Одновременно с установлением длины волны полосы приема в спектральных перестраиваемых фильтрах 31, 37 осуществляется установление соответствующей длины волны генерируемого лазерного излучения в лазерном генераторе 44 по сигналам управления, поступающим в блок управления этим лазерным генератором 45 от блока управления системой 51, а также в лазерном генераторе 48 по сигналам управления, поступающим в блок управления лазерным генератором 49 от блока управления системой 51. При этом длина волны генерируемого лазерного излучения устанавливается равной длине волны полосы пропускания соответствующего спектрального перестраиваемого фильтра в видимом и инфракрасном диапазонах длин волн для обеспечения узкополосной фильтрации и приема фотоприемными блоками 34 и 40 отраженного от КОП зондирующего лазерного излучения от лазерных генераторов 44 и 48 на соответствующих длинах волн видимого и инфракрасного диапазонов. Установленная длина волны генерируемого лазерного излучения лазерного генератора видимого диапазона поз.44 соответствует установленной длине волны полосы пропускания спектрального перестраиваемого фильтра 31 видимого диапазона длин волн. Соответственно установленная длина волны генерируемого лазерного излучения лазерного генератора 48 ИК-диапазона соответствует установленной длине волны полосы пропускания спектрального перестраиваемого фильтра 37 ИК-диапазона длин волн. Одновременно блок сканирования 52 осуществляет наведение визирной оси системы лазерной локации в точку контролируемой области пространства, пространственные координаты которой соответствуют измеренным угловым координатам источника облучающего лазерного излучения, измерение которых осуществлено ранее по первому принятому импульсу облучающего лазерного излучения с помощью второго фотоприемного блока 12 и третьего фотоприемного блока 16 в ИК-диапазоне длин волн. Дефлектор лазерного излучения 43 является двухкоординатным отклоняющим устройством и служит для более точной и быстрой подстройки направления в пространстве излучаемого лазерного импульса, генерируемого лазерным генератором 44. Аналогично дефлектор лазерного излучения 47 осуществляет двухкоординатное отклонение лазерного излучения от лазерного генератора 48. Информация о величинах указанных угловых координат сформирована в блоке обработки локационных сигналов 50 на основании сигналов, поступивших в блок 50 с выхода второго фотоприемного блока 12 и соответствующего блока регистрации сигналов 13 в видимом диапазоне длин волн, и сигналов с выхода третьего фотоприемного блока 16 и блока регистрации сигналов 17 в инфракрасном диапазоне длин волн. Эта информация с выхода блока 50 поступает далее в блок управления системой 51 и используется для формирования управляющих сигналов, поступающих из блока 51 в блок управления 53 блоком сканирования 52 и на управляющий вход дефлектора лазерного излучения 43 и обеспечивает управление блоком сканирования 52 и дефлектором лазерного излучения 43 для направления визирной оси системы лазерной локации и направления генерируемого лазерного излучения в заданную область контролируемого объема пространства. Аналогичным образом осуществляется подстройка направления в пространстве лазерного излучения инфракрасного лиапазона длин волн, генерируемого лазерным генератором 48, с помощью дефлектора лазерного излучения 47, управляемого сигналами от блока управления системой 51, на основании информации об угловых координатах облучающего источника инфракрасного излучения, поступившей в блок 51 от блока обработки локационных сигналов 50. Далее осуществляется генерация лазерного излучения лазерным генератором 44 на установленной длине волны, облучение соответствующей зоны контролируемой области пространства сформированным лазерным излучением и прием отраженного лазерного излучения спектральным перестраиваемым фильтром 31 и шестым фотоприемным блоком 34. Аналогично осуществляется генерация лазерного излучения лазерным генератором 47 на установленной длине волны ИК-диапазона, прием отраженного лазерного излучения спектральным перестраиваемым фильтром 37 и фотоприемным блоком 40. Электрические сигналы с выхода фотоприемного блока 34 регистрируются и оцифровываются в седьмом блоке регистрации сигналов 35 и далее поступают с выхода блока 35 в блок обработки локационных сигналов 50, в котором осуществляется анализ полученных сигналов и на основе этого анализа осуществляется обнаружение и идентификация наблюдаемых и обнаруженных средств прицеливания и активной лазерной разведки. Аналогично электрические сигналы с выхода фотоприемного блока 40 поступают в восьмой блок регистрации сигналов 41 и далее в оцифрованном виде поступают в блок обработки локационных сигналов 50. При этом осуществляется регистрация тонкой временной структуры оптических сигналов лазерного излучения, отраженного от соответствующей облученной области контролируемого объема пространства, с помощью фотоприемных блоков видимого (поз.34) и инфракрасного (поз.40) диапазонов длин волн и посредством соответствующих блоков регистрации сигналов 35, 41. Обнаружение объектов осуществляется, например, на основе пороговой обработки полученных сигналов в цифровой форме по соответствующим алгоритмам цифровой обработки локационных лазерных сигналов. После обнаружения объекта по превышению отраженным сигналом порогового уровня осуществляется операция распознавания обнаруженного объекта по характеру тонкой временной структуры зарегистрированного отраженного оптического сигнала, путем его сравнения с формой тонкой структуры эталонных отраженных сигналов для различных спектральных диапазонов длин волн зондирующего лазерного излучения, хранящихся в специальных регистрах памяти блока обработки локационных сигналов 50. Следует отметить, что в предлагаемой системе лазерной локации осуществляется прием и регистрация отраженного лазерного излучения от объектов в КОП в широком спектральном диапазоне в видимом диапазоне длин волн и в инфракрасном диапазоне длин волн. Для осуществления указанной регистрации и получения информации об отражательных характеристиках объектов в КОП в видимом и ИК-диапазонах длин волн используется перестройка длин волн генерации лазерных генераторов 44, 48, а также соответствующая одновременная перестройка длин волн полос пропускания спектральных перестраиваемых фильтров 31, 37. Одновременно в блоке обработки локационных сигналов 50 осуществляется измерение координаты дальности обнаруженного объекта - источника облучающего лазерного излучения - по величине временной задержки принятого отраженного лазерного излучения по отношению к моменту времени излучения импульса подсвечивающего лазерного излучения от соответствующего лазерного генератора 44 видимого диапазона длин волн, или лазерного генератора 48 инфракрасного диапазона длин волн. Следует отметить, что определение точных координат собственно источника облучающего лазерного излучения осуществляется по параметрам измеренных координат отраженного лазерного излучения от области контролируемого объема пространства, с угловыми координатами, соответствующими угловым координатам обнаруженного источника облучающего лазерного излучения, параметры которого были предварительно измерены в пассивной приемной части системы лазерной локации. При этом измеряется координата дальности до обнаруженного источника облучающего лазерного излучения по величине задержки по времени принятого в этом угловом направлении отраженного зондирующего лазерного излучения на соответствующей установленной длине волны, смещенной на некоторую величину относительно длины волны облучающего лазерного излучения, как это было отмечено выше. Прием отраженного излучения от области расположения источника облучающего лазерного излучения и определение его координат и параметров осуществляется независимо от этого помехового внешнего излучения, что и обуславливает высокую помехозащищенность предлагаемой системы лазерной локации.
Полученные результаты по анализу сигналов лазерного излучения, отраженных от объектов, расположенных в контролируемой области пространства, а также параметров облучающего лазерного излучения измеренного в пассивном канале приема системы лазерной локации, поступают с выхода блока обработки локационных сигналов 50 в блок управления системой 51, где отображаются на дисплее, входящем в состав данного блока. Одновременно полученная информация поступает также внешним потребителям через выходы блоков 50 или 51. Спектральный перестраиваемый фильтр 31 и фотоприемный блок 34 обеспечивают совместно с лазерным генератором 44 обнаружение и анализ объектов, расположенных в контролируемой области пространства путем облучения КОП и приема отраженного лазерного излучения в видимом диапазоне длин волн. Аналогичным образом обеспечивается облучение КОП лазерным излучением инфракрасного диапазона длин волн и прием отраженного лазерного излучения посредством лазерного генератора 48 и спектрального перестраиваемого фильтра 37, а также фотоприемного блока 40 инфракрасного диапазона длин волн. При этом при наличии облучающего лазерного излучения инфракрасного диапазона длин волн осуществляется определение длины волны облучающего ИК-лазерного излучения с помощью дифракционной оптической решетки 4 и первого фотоприемного блока 6, 7, а также более точное определение длины волны с помощью второго спектрального перестраиваемого фильтра 25 и пятого фотоприемного блока 28, аналогично тому, как это было сделано для видимого диапазона длин волн. Также определяется координата дальности до обнаруженного источника облучающего лазерного излучения ИК-диапазона длин волн. Полученная информация поступает в блок обработки локационных сигналов 50, и далее в блок управления системой 51 и используется для управления сдвигом длины волны полосы пропускания четвертого спектрального перестраиваемого фильтра 37 в инфракрасном диапазоне для помехозащищенного приема в ИК-диапазоне длин волн, аналогично тому, как это было сделано в видимом диапазоне длин волн для обеспечения помехозащищенного приема принимаемого отраженного от КОП лазерного излучения в видимом диапазоне длин волн. Таким образом, в предлагаемой системе лазерной локации реализуется режим повышенной помехозащищенности, характеризующийся обеспечением работы системы в условиях прямого помехового воздействия облучающего лазерного излучения от систем и средств лазерного прицеливания и активной лазерной разведки и воздействия, ведущих активное встречное наблюдение, разведку и воздействие прямым мощным лазерным излучением, направленным на приемные средства системы лазерной локации. Режим работы повышенной помехозащищенности реализуется в видимом и в инфракрасном диапазонах длин волн одновременно и независимо один от другого, для чего в предлагаемой системе лазерной локации предусмотрено наличие лазерных генераторов с перестройкой длины волны генерации, спектральных перестраиваемых фильтров и фотоприемных блоков видимого и инфракрасного диапазонов длин волн, работающих одновременно каждый в своем диапазоне длин волн. Следует отметить, что прием облучающего лазерного излучения и измерение его параметров осуществляется в предлагаемой системе лазерной локации в ее пассивном канале приема непрерывно и независимо от режима работы локационной активной части системы. Полученная информация о параметрах облучающего внешнего лазерного излучения по мере поступления используется для управления смещением длины волны полосы пропускания спектральных перестраиваемых фильтров в видимом 31 и инфракрасном 37 диапазонах длин волн, что обеспечивает помехозащищенный прием лазерного излучения, отраженного от КОП, при приеме излучения одновременно в видимом и инфракрасном диапазоне длин волн. При этом полученная информация о длинах волн облучающих лазерных излучений, которых может быть несколько, характеризует участки рабочего спектрального диапазона в видимом и ИК-диапазонах длин волн, в которых запрещается в данный момент времени осуществлять облучение КОП зондирующим лазерным излучением и осуществлять прием отраженного лазерного излучения вследствие наличия на этих длинах волн помехового облучающего лазерного излучения. Таким образом, в предлагаемой системе лазерной локации реализована более высокая информативность процесса получения информации об отражательных характеристиках обнаруженных и наблюдаемых объектов вследствие регистрации и анализа тонкой временной структуры принимаемых оптических сигналов, отраженных от объектов в КОП при облучении этих объектов зондирующим лазерным излучением в видимом и инфракрасном диапазоне длин волн. Этим обеспечивается более высокая эффективность обнаружения объектов и повышенная вероятность их распознавания в условиях воздействия облучающего лазерного помехового излучения на приемные средства предлагаемой системы лазерной локации.
В предлагаемой системе лазерной локации реализуется важная функция настройки и контроля функционирования системы. Данная функция реализуется с помощью блока контрольных отражателей 54, который устанавливается на некотором расстоянии от стационарно установленной аппаратуры системы лазерной локации (порядка 100 метров) см. фиг.1. В блоке контрольных отражателей 54 имеются отражатели двух типов, соответствующие двум типам отражающих характеристик реальных наблюдаемых объектов и оптико-электронных приборов. Блок 54 содержит диффузный отражатель 55 и уголковый отражатель 56, расположенные на платформе, снабженной устройством перемещения платформы. Указанные отражатели расположены на некотором расстоянии один от другого. Поэтому отраженные сигналы от этих отражателей при их облучении лазерным излучением от лазерных генераторов 44, 48 разрешаются приемными оптическими средствами предлагаемой системы лазерной локации и по отдельности регистрируются фотоприемными блоками системы лазерной локации. В результате осуществляется имитация отражения лазерного излучения от световозвращающих систем типа катафота или бликующих оптико-электронных приборов, а также отражение от объектов с широкой угловой диаграммой направленности отраженного излучения в видимом и инфракрасном диапазоне длин волн. Для осуществления операции контроля функционирования системы производят следующие действия в автоматическом режиме. Лазерные генераторы 44, 48 осуществляют генерацию серии импульсов лазерного излучения видимого и инфракрасного диапазонов длин волн. Блок сканирования 52 направляется своей визирной осью на блок контрольных отражателей 54. Отраженное лазерное излучение поступает на приемные объективы 1, 30, 36. Осуществляется прием и регистрация лазерного излучения одновременно и параллельно всеми фотоприемными блоками и передача зарегистрированных сигналов в цифровой форме в блок обработки локационных сигналов 50. В блоке обработки локационных сигналов 50 по специальной программе контроля функционирования осуществляется обработка полученных сигналов в результате чего определяются параметры функционирования и обработки всех рассмотренных выше вариантов приема локационных сигналов при определении длины волны лазерного излучения в видимом и инфракрасном диапазонах длин волн, определения угловых координат принимаемого лазерного излучения в пассивных каналах приема системы лазерной локации и одновременно приема этого же излучения в каналах приема с фотоприемными блоками 34, 40, а также контроль получаемых значений угловых координат в каналах приема с фотоприемными блоками 22, 28, 34, 40. Одновременно осуществляется тестирование смещения длин волн генерируемого лазерного излучения лазерными генераторами 44, 48, смещения длин волн полос приема в спектральных перестраиваемых фильтрах 19, 25, 31, 37 и параметров измеряемых длин волн с помощью дифракционной оптической решетки 4 и первого фотоприемного блока 6, 7. Осуществляется также контроль компенсации параллакса во всех фотоприемных блоках с помощью специальной обработки сигналов в блоке обработки локационных сигналов 50. В блоке обработки локационных сигналов 50 осуществляется контроль и установление величин пропускания принимаемого лазерного излучения во всех управляемых оптических фильтрах поз.3, 11, 15, 21, 27, 33, 39. При этом в блоке 50 образуется информация о величинах уровней оптических сигналов (лазерных излучений), зарегистрированных в соответствующих фотоприемных блоках, на основании которой из блока 50 в блок управления системой 51 поступает информация, свидетельствующая о том, на какую величину должно быть изменено или установлено пропускание соответствующего управляемого оптического фильтра. В блоке 51 вырабатываются соответствующие управляющие сигналы, поступающие на указанные управляемые оптические фильтры. На этом операции по контролю функционирования системы лазерной локации завершаются. После завершения контрольных операций платформа с расположенными на ней отражателями лазерного излучения с помощью устройства перемещения, входящего в состав блока контрольных отражателей 54 опускается и выводится из поля зрения системы лазерной локации.
В предлагаемой системе лазерной локации предусмотрен также режим постановки активных помех обнаруженным источникам облучающего лазерного излучения и другим оптико-электронным средствам, ведущим встречную разведку и прицеливание. Для постановки активных помех блок сканирования 52 осуществляет наведение визирной оси системы в точку КОП с угловыми координатами, соответствующими измеренным ранее угловым координатам источника облучающего лазерного излучения. Лазерный генератор 44 или 48 осуществляет генерацию лазерного излучения на длине волны, соответствующей ранее точно измеренной величине длины волны облучающего лазерного излучения в видимом или инфракрасном диапазоне длин волн. При этом осуществляется генерация нескольких последовательных импульсов лазерного излучения, а интенсивность воздействующего сформированного лазерного излучения выбирается в соответствии с измеренной величиной дальности до обнаруженного источника облучающего лазерного излучения.
В предлагаемой системе лазерной локации использованы блоки и узлы, освоенные современной промышленностью. Используемые в системе четыре спектральных перестраиваемых фильтра выполнены на основе так называемых перестраиваемых акустооптических фильтров (ячеек), работающих в видимом (поз.19, 31) и в инфракрасном (25, 37) диапазонах длин волн и представляют собой современную разработку в области оптоэлектроники. Указанный акустооптический фильтр состоит из акустооптического кристалла, оптически прозрачного для используемых длин волн видимого, или инфракрасного диапазонов, и пьезоэлемента, возбуждающего в этом кристалле ультразвуковые волны. Используются кристаллы парателлурита, ниобата лития, кварца. При распространении оптического сигнала лазерного излучения через кристалл происходит его взаимодействие с динамической фазовой структурой, возбужденной в данном кристалле посредством ультразвуковых волн. В результате этого происходит изменение условий распространения оптического сигнала через кристалл для определенной спектральной полосы оптического сигнала - лазерного излучения. На основе этого физического эффекта разработаны перестраиваемые акустооптические фильтры, работающие в видимом, инфракрасном, а также в ультрафиолетовом диапазонах длин волн, обеспечивающие выделение (пропускание) узкой спектральной полосы из принимаемого оптического сигнала - проходящего через кристалл лазерного излучения. Принцип действия и характеристики указанных акустооптических перестраиваемых фильтров, а также акустооптических быстродействующих дефлекторов лазерного излучения, изложены в монографии [5] на стр.219-234 (акустооптические перестраиваемые фильтры) и на стр.134-167 (дефлекторы лазерного излучения), а также в различных публикациях [6]. Указанные перестраиваемые акустооптические фильтры обладают высокой эффективностью, высокой разрешающей способностью и возможностью работы в широком угловом поле зрения. Перестройка длины волны узкой спектральной полосы пропускания фильтров реализуется с высоким быстродействием в динамическом режиме. В предлагаемой системе лазерной локации в качестве спектральных перестраиваемых фильтров использованы акустооптические ячейки видимого и инфракрасного диапазонов длин волн, работающие в режиме собственно узкополосных быстроперестраиваемых фильтров, аналогичных по величине полосы пропускания, например, интерференционным фильтрам, или реализующих более узкую полосу пропускания оптических сигналов, а также выполняющие функции высокоточных быстродействующих спектральных анализаторов видимого и инфракрасного диапазонов длин волн (поз.19, 25). Спектральные перестраиваемые фильтры 31, 37, 19, 25 содержат собственно акустооптическую перестраиваемую ячейку на основе акустооптического кристалла с пьезовозбудителем и специальный генератор высокочастотных электрических сигналов, формирующий специальные напряжения для возбуждения в кристалле указанных ультразвуковых волн и управляемый по сигналам от блока управления системой 51. Дефлекторы лазерного излучения видимого диапазона 43 и ИК-диапазона 47 длин волн выполнены на основе акустооптических отклоняющих ячеек [5] - сканаторов оптического излучения. В качестве лазерных генераторов 44, 48 можно использовать широкий класс генераторов с перестройкой длины волны генерации в видимом и ИК-диапазонах длин волн на основе различных физических принципов, например, с перестройкой длины волны с помощью внутрирезонаторных средств, изменения параметров резонаторов и активных сред [7]. Блок сканирования 52 выполнен на основе механических двухкоординатных отклоняющих устройств, использующих шаговые электрические двигатели. Фотоприемные блоки выполнены на основе современных матричных фоточувствительных приемников видимого и инфракрасного диапазона с параллельным съемом информации, например, матричных ФЭУ, имеющих высокое быстродействие и чувствительность. Первый фотоприемный блок выполнен на основе двух фоточувствительных линеек видимого и ИК-диапазонов длин волн, расположенных на одной линии в фокальной плоскости линзы 5. Возможно также использование в фотоприемных блоках высокочувствительных многоэлементных матриц ПЗС, работающих в режимах приема импульсных оптических сигналов, и в режиме накопления оптических сигналов. Первый приемный объектив 1 выполнен широкоугольным из специального оптического стекла с пропусканием в широком диапазоне видимых и ИК-длин волн (в основном в ближнем ИК-диапазоне). Возможно также выполнение данного объектива на основе металлооптики отражательного типа. Также возможно использование оптических систем отражательного типа в широком диапазоне длин волн для всех используемых объективов и линз. Формирователи лазерного пучка 42, 46 предназначены для установления заданных параметров и размеров сечения лазерных пучков и выполнены на основе отражательной металлооптики, работающей в видимом и инфракрасном диапазонах длин волн. Полупрозрачные и отражательные зеркала выполнены широкополосными со специальными оптическими покрытиями, обеспечивающими пропускание и светоделение оптических излучений в широком диапазоне от видимого до инфракрасного диапазонов длин волн. Дифракционная оптическая решетка 4 может быть использована пропускающего или отражательного типа для работы в широкой полосе длин волн от видимого до ИК-диапазонов длин волн. Возможно также использование двух параллельно работающих дифракционных решеток от инфракрасного до ультрафиолетового диапазонов длин волн. Блоки регистрации сигналов поз.8, 9, 13, 17, 23, 29, 35, 41 выполнены на основе современных интегральных электронных схем, обеспечивают параллельный съем информации с выходов фотоприемных блоков, оцифровку электрических сигналов, буферное запоминание массива информации и передачу по специальным интерфейсам в блок обработки локационной информации 50. Последний представляет собой высокопроизводительный компьютер, функционально связанный с несколькими источниками информации, обеспечивающий обработку больших массивов информации по специальным программам. Блок управления системой 51 представляет собой стандартную высокопроизводительную ЭВМ, осуществляющую управление работой нескольких устройств через специальные интерфейсы. Блок 51 содержит также монитор и устройства связи с внешними потребителями информации. Система лазерной локации содержит семь управляемых оптических фильтров, служащих для защиты фотоприемных блоков от оптических сигналов высокой интенсивности и установления оптимального режима работы фотоприемников. Фильтры выполнены на основе электрооптических управляемых модуляторов, например, на базе жидких кристаллов. Возможно также использование управляемых шаговыми электродвигателями диафрагм, устанавливаемых в плоскости параллельного хода лучей в линзовой системе.
В предлагаемой системе лазерной локации в качестве спектральных перестраиваемых фильтров возможно использование квантового усилителя, разработанного на основе фотодиссоционного йодного лазера, получившего название активный квантовый фильтр [8], [9], [10]. Данный активный квантовый фильтр обладает предельно высокой чувствительностью, ограниченной квантовым пределом чувствительности, весьма узкой спектральной полосой приема лазерного излучения в ближнем инфракрасном диапазоне длин волн, возможностью оперативной перестройки длины волны узкополосной фильтрации принимаемого оптического сигнала с помощью управляемого магнитного поля [8]. Величина полосы спектральной фильтрации активного квантового фильтра составляет 0,01 обратных сантиметров в ближнем ИК-диапазоне длин волн, что соответствует величине 0,016 Ангстрем. Чувствительность активного квантового фильтра в режиме приема, определяемого квантовым пределом, позволяет осуществлять прием и регистрацию однофотонных оптических сигналов в указанной узкой спектральной полосе приема, управляемой магнитным полем, воздействующим на активную лазерную среду квантового усилителя. Вследствие наличия ряда уникальных свойств при осуществлении приема оптических сигналов применение данного активного квантового фильтра в качестве спектрального перестраиваемого фильтра и высокочувствительного приемного лазерного устройства является перспективным.
По материалам данной заявки проведены научные исследования и эксперимент по регистрации локационных лазерных сигналов на фоне сильного помехового оптического излучения в ближнем инфракрасном диапазоне длин волн. В данном эксперименте в качестве спектрального перестраиваемого фильтра поз.37 фиг.1 использован указанный выше квантовый усилитель - активный квантовый фильтр. Усиленный и отфильтрованный оптический сигнал с выхода активного квантового фильтра - спектрального перестраиваемого фильтра 37, регистрировался в данном эксперименте фотоприемным блоком 40 фиг.1, работающим в ближнем инфракрасном диапазоне длин волн. Результаты проведенного эксперимента представлены на фиг.2 в виде осциллограммы сигналов, зарегистрированной на выходе блока регистрации сигналов поз.41 на фиг.1 системы лазерной локации. Представленная осциллограмма соответствует рисунку 3 из работы автора [10] и демонстрирует прием и регистрацию импульса лазерного излучения на фоне мощной импульсной засветки входной приемной апертуры приемного объектива поз.36 фиг.1. Согласно представленной осциллограмме на фиг.2 импульс полезного лазерного сигнала, зарегистрированный на 13-й микросекунде, имел уровень 0,42 вольт при уровне помехового сигнала 0,14 вольт в этом моменте времени. На фиг.2 помеховый оптический импульс действует от 8-й до 20-й микросекунд. Отсюда значение отношения сигнал/шум равно трем единицам при регистрации импульсного лазерного сигнала, что вполне достаточно для надежного обнаружения этого сигнала, отраженного от наблюдаемого объекта, на фоне мощной фоновой засветки. Импульс на уровне 8-й микросекунды является электрической помехой от запуска мощного источника фонового излучения, превышающего по яркости солнечный диск. При этом эксперименте фоновая засветка на входной апертуре приемного объектива поз.36 на фиг.1 создавалась источником импульсного оптического излучения в ближнем ИК-диапазоне длин волн с яркостной температурой, превышающей примерно в пять раз яркостную температуру Солнца. Уровень принимаемого входного сигнала лазерного излучения, зарегистрированного в виде осциллограммы на фиг.2, составлял на входной апертуре приемного объектива 36 величину, соответствующую энергии Е двадцати фотонов на длине волны 1,3 микрометра в ближнем ИК-диапазоне [10], что приближается к квантовому пределу чувствительности в данных конкретных условиях эксперимента. В указанной работе показано, что чувствительность приемного устройства на основе активного квантового фильтра в системе лазерной локации при приеме лазерных сигналов на фоне солнечного диска ухудшается всего на 12 процентов, т.е. практически остается на уровне квантового предела чувствительности, обусловленного дискретной квантовой природой оптического излучения. Проведенные в работе [10] сравнения помехозащищенности предлагаемой системы лазерной локации при использовании в качестве спектрального перестраиваемого фильтра ближнего ИК-диапазона активного квантового фильтра, представленного в указанных работах [8-10], с приемным устройством, на основе наиболее высокочувствительного ФЭУ-115 видимого диапазона длин волн, использующего интерференционный фильтр с полосой пропускания 5 нм и при отношении сигнал/шум, равном 3, показали превышение чувствительности системы лазерной локации с активным квантовым фильтром в 70 раз (по величине уменьшения количества сигнальных фотонов на входе сравниваемых устройств в сходных условиях регистрации входных импульсных лазерных сигналов), а также увеличение помехозащищенности примерно в 100 раз (по величине ухудшения чувствительности ФЭУ при приеме на фоне сильной фоновой засветки, соответствующей излучению солнечного диска на входной апертуре приемного объектива). Таким образом, проведенные экспериментальные исследования продемонстрировали высокую помехозащищенность и чувствительность предлагаемых средств лазерной локации с использованием спектрального перестраиваемого фильтра по сравнению с известными средствами лазерной локации на основе высокочувствительных ФЭУ и узкополосных неперестраиваемых интерференционных фильтров.
Представленная система лазерной локации за счет использования совокупности новых технических средств оптоэлектроники и лазерной техники позволяет достигнуть следующих результатов.
Повысить помехозащищенность системы в условиях прямого действия активных лазерных помех и наличия облучающего лазерного излучения, воздействующего на приемные объективы и фотоприемные средства системы лазерной локации. Обеспечить повышение информативности процесса получения информации о наблюдаемых объектах в контролируемой области пространства в условиях действия организованных лазерных помех, наличия оптико-электронных систем, ведущих встречное наблюдение, прицеливание и активную лазерную разведку в контролируемой области пространства. Обеспечить измерение дальности до источников облучающего лазерного излучения, определение их отражательных характеристик, повышение эффективности обнаружения и распознавания оптико-электронных средств наблюдения, ведущих активную встречную разведку и прицеливание, в условиях прямого лазерного помехового воздействия на приемные каналы системы лазерной локации.
Предлагаемая система лазерной локации реализует возможность постановки лазерных помех и воздействия лазерным излучением на обнаруженные источники облучающего лазерного излучения и обеспечивает повышение эффективности этого воздействия за счет точного определения расстояния до этих источников и определения их пространственных координат независимо от наличия прямого воздействия лазерных помех от этих источников. Указанные новые технические результаты получены вследствие использования спектральных перестраиваемых фильтров в видимом и ИК-диапазонах и новых технических средств современной оптоэлектроники.
Источники информации
[1] Патент Франции FR №2547650 от 1984 г.
[2] Патент Англии GB №2256554 от 09.12.1992 г.
[3] Патент РФ №2352959 от 20.04.2009.
[4] Патент РФ №2278399 от 20.06.2006 (прототип).
[5] Балакший В.И., Парыгин В.Н., Чирков Л.Е. Физические основы акустооптики. - М.: Радио и связь, 1985. (стр.219-234); (стр.134-167).
[6] Балакший В.И., Манкевич С.К., Парыгин В.Н. и др. Квантовая электроника, т.12, №4, 1985 г., стр.743-748.
[7] Справочник по лазерной технике под редакцией Напартовича А.П., М. Энергоиздат 1991 г.
[8] Манкевич С.К., Носач О.Ю. и др. Патент РФ №2133533 от 20.07.1999. Способ спектральной фильтрации оптических сигналов и устройство для его осуществления - активный квантовый фильтр.
[9] Кутаев Ю.Ф., Манкевич С.К., Носач О.Ю., Орлов Е.П. Квантовая Электроника, т.30, №9, 2000 г., стр.833-838. Лазерное приемное устройство с квантовым пределом чувствительности в ближнем ИК-диапазоне.
[10] Кутаев Ю.Ф., Манкевич С.К., Носач О.Ю., Орлов Е.П. Квантовая электроника, т, 32, №4, 2002 г., стр.349-356. Влияние мощной фоновой засветки на чувствительность лазерного приемного устройства с йодным активным квантовым фильтром.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |
| ЛАЗЕРНОЕ ПРИЕМНОЕ УСТРОЙСТВО | 2015 |
|
RU2584185C1 |
| ЛАЗЕРНЫЙ ЛОКАТОР | 2014 |
|
RU2575766C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ПРИЕМНАЯ СИСТЕМА | 2022 |
|
RU2799499C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2529732C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2016 |
|
RU2639321C1 |
| Лазерный голографический локатор | 2023 |
|
RU2812809C1 |
Изобретение относится к области лазерной локации и может быть использовано в стационарных наземных лазерных локационных системах наблюдения и контроля окружающего пространства для обнаружения оптических и оптико-электронных приборов. Система лазерной локации содержит высокочувствительные фотоприемные блоки видимого и инфракрасного диапазонов длин волн, лазерные генераторы с перестройкой длины волны генерации, спектральные перестраиваемые фильтры. Технический результат - повышение помехоустойчивости работы системы в условиях воздействия помех от лазерного излучения, увеличение эффективности обнаружения и вероятности распознавания оптических и оптико-электронных приборов в условиях действия организованных оптических помех от лазерных систем прицеливания и лазерного воздействия. 6 з.п. ф-лы, 2 ил.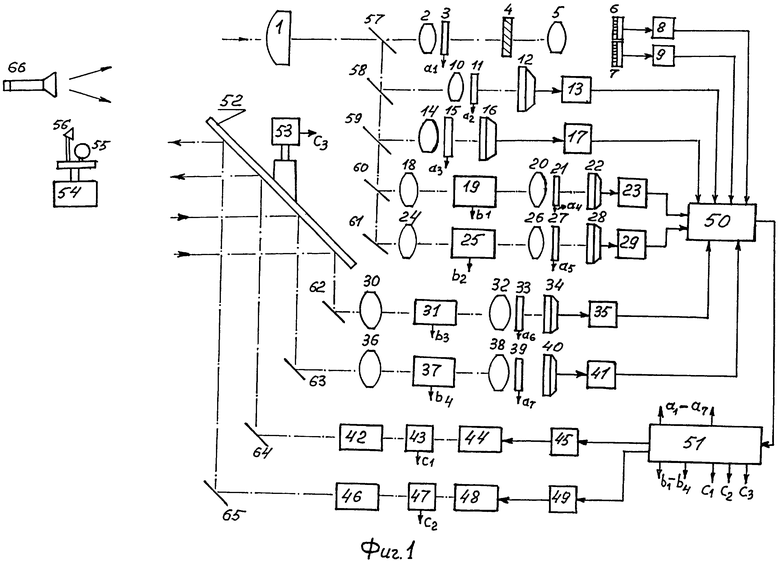
1. Система лазерной локации, содержащая блок сканирования с блоком управления, установленные на первой оптической оси оптически связанные первый приемный объектив, первый фотоприемный блок, установленные на шестой оптической оси оптически связанные второй приемный объектив, шестой фотоприемный блок, установленные на восьмой оптической оси оптически связанные первый формирователь лазерного пучка, первый лазерный генератор с блоком управления, подключенный к блоку управления системой, оптический вход второго приемного объектива посредством отражательного зеркала связан с блоком сканирования, оптический выход первого формирователя лазерного пучка посредством отражательного зеркала оптически связан с блоком сканирования, отличающаяся тем, что введены пять фотоприемных блоков, восемь блоков регистрации сигналов, третий приемный объектив, семь управляемых оптических фильтров, десять линз, четыре спектральных перестраиваемых фильтра, дифракционная оптическая решетка, блок обработки локационных сигналов, второй лазерный генератор с блоком управления, второй формирователь лазерного пучка, два дефлектора лазерного излучения и блок контрольных отражателей, при этом на первой оптической оси последовательно установлены между первым приемным объективом и первым фотоприемным блоком оптически связанные первая линза, первый управляемый оптический фильтр, дифракционная оптическая решетка и вторая линза, на второй оптической оси последовательно установлены оптически связанные третья линза, второй управляемый оптический фильтр и второй фотоприемный блок, оптический вход третьей линзы посредством двух полупрозрачных зеркал связан с выходом первого приемного объектива, на третьей оптической оси последовательно установлены оптически связанные четвертая линза, третий управляемый оптический фильтр и третий фотоприемный блок, оптический вход четвертой линзы посредством двух полупрозрачных зеркал связан с выходом первого приемного объектива, на четвертой оптической оси последовательно установлены оптически связанные пятая линза, первый спектральный перестраиваемый фильтр, шестая линза, четвертый управляемый оптический фильтр и четвертый фотоприемный блок, оптический вход пятой линзы посредством двух полупрозрачных зеркал связан с выходом первого приемного объектива, на пятой оптической оси последовательно установлены оптически связанные седьмая линза, второй спектральный перестраиваемый фильтр, восьмая линза, пятый управляемый оптический фильтр и пятый фотоприемный блок, оптический вход седьмой линзы посредством отражательного и полупрозрачного зеркал связан с выходом первого приемного объектива, на шестой оптической оси последовательно установлены между вторым приемным объективом и шестым фотоприемным блоком оптически связанные третий спектральный перестраиваемый фильтр, девятая линза и шестой управляемый оптический фильтр, на седьмой оптической оси последовательно установлены оптически связанные третий приемный объектив, четвертый спектральный перестраиваемый фильтр, десятая линза, седьмой управляемый оптический фильтр и седьмой фотоприемный блок, оптический вход третьего приемного объектива посредством отражательного зеркала связан с блоком сканирования, первый дефлектор лазерного излучения расположен на восьмой оптической оси между первым формирователем лазерного пучка и первым лазерным генератором, на девятой оптической оси последовательно расположены оптически связанные второй формирователь лазерного пучка, второй дефлектор лазерного излучения и второй лазерный генератор, подключенный к блоку управления вторым лазерным генератором, оптический выход второго формирователя лазерного пучка посредством отражательного зеркала связан с блоком сканирования, выходы первого фотоприемного блока подсоединены ко входам первого и второго блоков регистрации сигналов, выходы фотоприемных блоков от второго до седьмого включительно подключены к соответствующим входам блоков регистрации сигналов от третьего до восьмого включительно, выходы блоков регистрации сигналов подключены ко входам блока обработки локационных сигналов, выход которого подключен ко входу блока управления системой, управляющие входы управляемых оптических фильтров подключены к блоку управления системой, управляющие входы спектральных перестраиваемых фильтров подключены к блоку управления системой, управляющие входы первого и второго дефлекторов лазерного излучения подключены к блоку управления системой.
2. Система лазерной локации по п.1, отличающаяся тем, что в ней блок контрольных отражателей содержит устройство перемещения, платформу с расположенными на ней уголковым и диффузным отражателями лазерного излучения.
3. Система по п.1, отличающаяся тем, что в ней первый и второй лазерные генераторы выполнены на основе лазеров видимого и инфракрасного диапазонов длин волн с возможностью перестройки длин волн генерируемых лазерных излучений.
4. Система по п.1, отличающаяся тем, что в ней первый фотоприемный блок выполнен на основе двух фотоприемных линеек видимого и инфракрасного диапазонов длин волн, расположенных совместно в фокальной плоскости второй линзы, выходы которых подсоединены ко входам соответственно первого и второго блоков регистрации сигналов.
5. Система по п.1, отличающаяся тем, что в ней второй и последующие фотоприемные блоки выполнены на основе многоэлементных двумерных фотоприемных матриц видимого и инфракрасного диапазонов длин волн.
6. Система по п.1, отличающаяся тем, что в ней спектральные перестраиваемые фильтры выполнены на основе акустооптической перестраиваемой ячейки, в которой возбуждены ультразвуковые волны, взаимодействующие с принимаемым лазерным излучением.
7. Система по п.1, отличающаяся тем, что в ней спектральные перестраиваемые фильтры выполнены на основе квантового (лазерного) усилителя - активного квантового фильтра, перестраиваемого по величине длины волны узкополосной фильтрации с помощью магнитного поля.
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278399C2 |
| ЛАЗЕРНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1996 |
|
RU2113717C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1997 |
|
RU2129288C1 |
| ПЕНОБЕТОНОСМЕСИТЕЛЬ | 2003 |
|
RU2256554C1 |

