Изобретение относится к элементам конструкции РЛС, в частности к устройствам преобразования угла в дискретные электрические сигналы, связанные с географической азимутальной координатой.
Изобретение может быть использовано в радиолокации в системах преобразования азимутальной информации РЛС.
Известна система преобразования углового перемещения антенны радиолокационного комплекса 5H117 [1], состоящая из блока датчиков, механизмов грубого и точного ориентирования, формирователя дискретных азимутальных сигналов, повторителя вращения и формирователя стробов. Недостатком системы является сложность ее ориентирования (угловой "привязки" дискретных азимутальных сигналов к географическому "Северу"). Сложность операции ориентирования объясняется необходимостью механического поворота датчиков, расположенных в труднодоступных местах - на антенно-мачтовом устройстве РЛС. Вследствие этого на ориентирование системы требуется много времени.
Другим недостатком системы является ее невысокая точность, обусловленная тем, что датчик азимутальной отметки "Север" расположен в повторителе вращения промежуточной следящей системы, которая вносит дополнительные азимутальные ошибки.
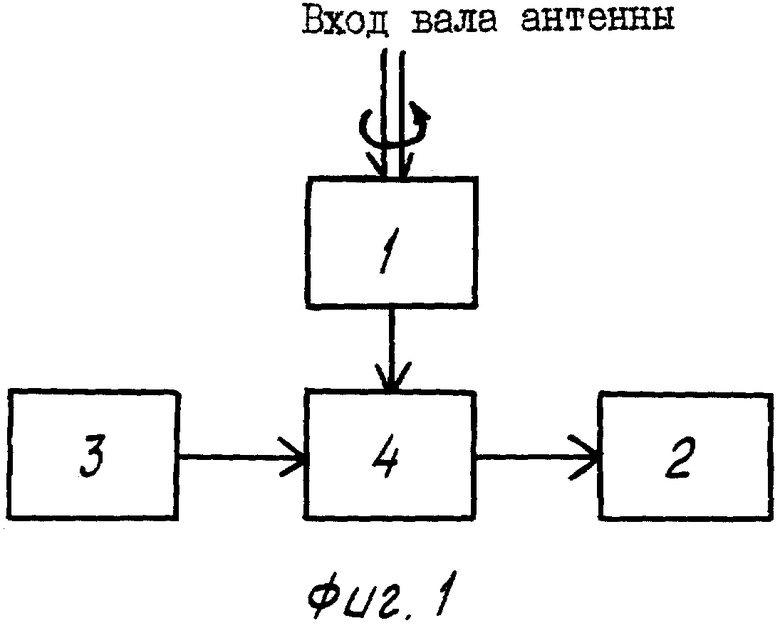
Из известных систем преобразования углового перемещения наиболее близкой по технической сущности к предлагаемой является система преобразования углового перемещения антенны РЛС по а.с. №1840485 [2], содержащая блок датчиков со входом для подключения вала антенны и последовательно соединенные имитатор вращения, преобразователь угловой информации и блок формирователя стробов, причем выход блока датчиков соединен со вторым входом преобразователя угловой информации.
Блок датчиков преобразует угловое перемещение вала антенны в азимутальную информацию в форме двух последовательностей импульсов: один импульс и 2n импульсов за оборот вала антенны, где n задано необходимой точностью преобразования угла. Из этих импульсных последовательностей преобразователь угловой информации, представляющий собой двоичный счетчик со схемой переключения сигналов на входе, формирует азимутальный двоичный код, поступающий на блок формирования стробов, состоящий из совокупности дешифраторов кодовых комбинаций азимутальной информации. Имитатор вращения состоит из генератора импульсов и двоичного счетчика и вырабатывает сигналы, аналогичные сигналам блока датчиков.
Данная система обладает высокой точностью преобразования, однако не позволяет достаточно быстро и просто производить операцию ориентирования и в этом смысле имеет тот же недостаток, что и система преобразования углового перемещения антенны РЛК 5Н117.
Целью настоящего изобретения является упрощение операции ориентирования системы и сокращение времени ориентирования.
Поставленная цель достигается тем, что в систему преобразования углового перемещения антенны РЛС, содержащую блок датчиков со входом для подключения вала антенны, блок формирования стробов, имитатор вращения и преобразователь угловой информации, первый вход которого соединен с выходом блока датчиков, а второй - с имитатором вращения, введены блок контроля, датчик кода и сумматор, первый вход которого соединен с выходом преобразователя угловой информации, второй - с выходом датчика кода, а выход - со входами блока формирования стробов и блока контроля.
Сущность изобретения поясняется нижеследующим описанием и графическими материалами.
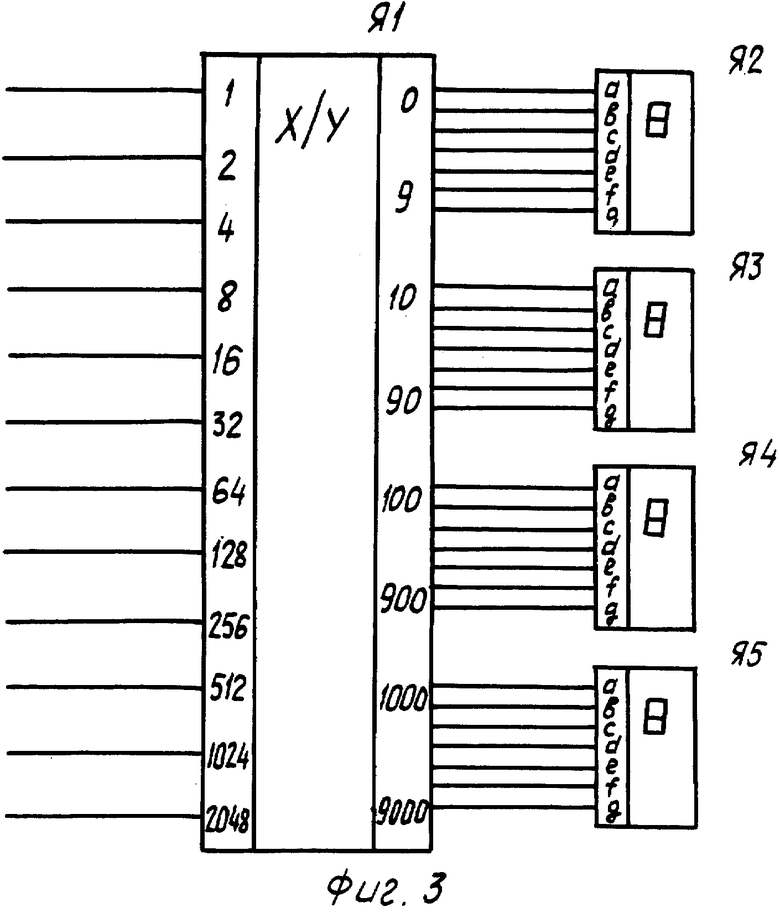
На фиг.1 и 2 представлены соответственно система преобразования углового перемещения - прототип и предложенная система преобразования углового перемещения, где обозначено:
1 - блок датчиков; 2 - блок формирования стробов; 3 - имитатор вращения; 4 - преобразователь угловой информации; 5 - блок контроля; 6 - датчик кода; 7 - сумматор.
На фиг.3 представлен вариант схемы блока контроля, где обозначено:
Я1 - преобразователь двоичного кода в сигналы семисегментного кода,
Я2...Я5 - цифровые индикаторы кода.
Предложенная система содержит блок датчиков 1 со входом для подключения вала антенны, блок формирования стробов 2, имитатор вращения 3 и преобразователь угловой информации 4, первый вход которого соединен с блоком датчиков 1, второй - с имитатором вращения 3, а также блок контроля 5, датчик 6 и сумматор 7, первый вход которого соединен с выходом преобразователя информации 4, второй - с выходом датчика кода 6, а выход - со входами блока формирования стробов 2 и блока контроля 5.
Вариант схемы блока контроля 5, приведенный на фиг.3, содержит преобразователь двоичного кода в сигналы семисегментного кода Я1 со входами для подключения двоичного кода и цифровые индикаторы кода Я2-Я5, входы которых подключены к выходам преобразователя Я1.
Система работает следующим образом.
При вращении вала антенны блок датчиков 1 преобразует угловое перемещение вала в дискретную информацию, представляющую собой две последовательности азимутальных импульсов: один импульс (установочный) и 2n импульсов за каждый оборот вала антенны, где число n определено заданной точностью преобразования.
Эти сигналы поступают на первый вход преобразователя 4. На второй вход преобразователя 4 с имитатором вращения 3 подаются аналогичные сигналы, необходимые для работы преобразователя 4 в режиме имитации азимутальной обстановки. В зависимости от выбранного режима (работа-имитация) преобразователь 4 осуществляет коммутацию указанных входных сигналов, а затем вырабатывает из них азимутальный двоичный код, синхронизированный установочным импульсом. С выхода преобразователя 4 этот код поступает на первый вход n - разрядного сумматора 7. Последний может быть выполнен, например, по схеме, приведенной в [3], стр.198, рис.3.3.39. На второй вход сумматора 7 подается двоичный код поправки, формируемый датчиком кода 6. В качестве датчика кода может быть использован, например, датчик-преобразователь типа ДП2-М 0ЯЗ-036-015 ТУ.
Выходные сигналы сумматора 7 поступают на блок формирования стробов 2, вырабатывающий азимутальные стробы РЛС, и на вход блока контроля 5.
При ориентировании системы антенна устанавливается на заранее известный азимут местного предмета. Блок контроля 5 индицирует при этом произвольный азимут, соответствующий коду на выходе сумматора 7. Изменяя значение кода на выходе датчика кода 6 и следя за показаниями индикаторов блока контроля 5, добиваются получения значения кода с сумматора 7, равного заданному известному азимуту местного предмета.
После включения вращения антенны угловая информация с выхода сумматора 7, а также азимутальные стробы блока формирования стробов 2 оказываются пространственно "привязанными" к истинным географическим координатам, следовательно, система преобразователя углового перемещения антенны сориентирована.
Таким образом, введение в систему датчика кода, блока контроля и сумматора с указанными выше связями позволило упростить операцию ориентирования системы и за счет этого значительно сократить время ориентирования.
Источники информации
1. Техническое описание радиолокационного комплекса 5H117 УЦ1.230.006, гл.XVII.
2. Авторское свидетельство № 1840485, кл. G 08 C 9/00 от 4.05.79 г. "Система преобразования угла поворота антенны РЛС" - прототип.
3. "Аналоговые и цифровые интегральные схемы",- под ред. С.В. Якубовского, М.: Советское радио, 1979 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ УГЛОВОГО ПЕРЕМЕЩЕНИЯ АНТЕННЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1992 |
|
RU2254605C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА АНТЕННЫ | 1978 |
|
SU1840485A1 |
| СИСТЕМА ПРЕОБРАЗОВАНИЯ УГЛОВОГО ПЕРЕМЕЩЕНИЯ АНТЕННЫ РЛС | 2003 |
|
RU2248092C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1983 |
|
SU1840567A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1985 |
|
SU1840505A1 |
| СИСТЕМА ПРЕОБРАЗОВАНИЯ УГЛОВОГО ПЕРЕМЕЩЕНИЯ АНТЕННЫ РЛС | 2005 |
|
RU2305895C2 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛОВОЙ ИНФОРМАЦИИ | 1978 |
|
SU1840361A1 |
Изобретение относится к элементам конструкции радиолокационных систем и может быть использовано при определении географической азимутальной координаты. Технический результат заключается в повышении быстродействия устройства. Устройство содержит блок датчиков, выход которого подключен к первому входу блока формирования сигналов азимутального двоичного кода, второй вход которого соединен с выходом имитатора вращения, а также блок формирования стробов. Согласно изобретению введены последовательно соединенные датчик кода, сумматор и блок индикации. Второй вход сумматора соединен с выходом блока формирования согласно азимутальному двоичному коду, а выход соединен с входом блока формирования стробов. 3 ил.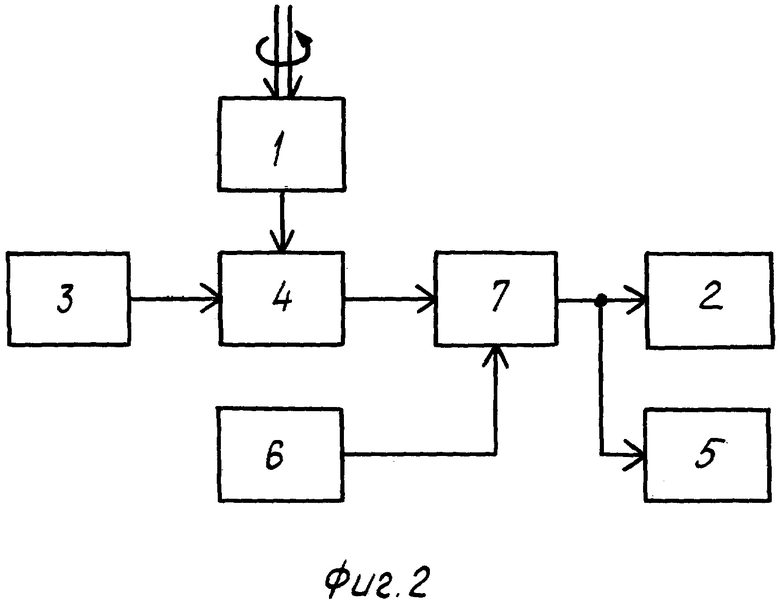
Устройство для преобразования углового перемещения антенны радиолокационной станции, содержащее блок датчиков, выход которого подключен к первому входу блока формирования сигналов азимутального двоичного кода, второй вход которого соединен с выходом имитатора вращения, а также блок формирования стробов, отличающееся тем, что, с целью повышения быстродействия устройства, оно содержит последовательно соединенные датчик кода, сумматор и блок индикации, причем второй вход сумматора соединен с выходом блока формирования сигналов азимутального двоичного кода, а выход соединен с входом блока формирования стробов.
| Аналоговые и цифровые интегральные схемы | |||
| Под ред | |||
| Якубовского С.В | |||
| М.: Сов | |||
| радио, 1979 г | |||
| Авт | |||
| свид | |||
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА АНТЕННЫ | 1978 |
|
SU1840485A1 |
| кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

