Изобретение относится к системам управления и регулирования неэлектрических величин, а именно к устройствам преобразования неэлектрических величин в электрические сигналы.
Устройство может найти применение в радиолокационной, космической технике и системах связи - там, где решается задача преобразования углового перемещения антенны в цифровой код.
Известна система преобразования углового перемещения антенны РЛС, содержащая блок датчиков со входом для подключения вала антенны и последовательно соединенные имитатор вращения, преобразователь угловой информации и блок формирования стробов, причем выход блока датчиков соединен со вторым входом преобразователя угловой информации.
Данная система обладает более высокой точностью по сравнению с предыдущей, так как не имеет промежуточного повторителя вращения, однако и эта система не позволяет достаточно быстро и просто проводить операцию ориентирования, потому что ей присущ недостаток предыдущей системы, а именно - необходимость механического поворота датчиков.
Из известных устройств преобразования углового перемещения антенны РЛС наиболее близким по технической сущности к предлагаемому является устройство преобразования углового перемещения антенны РЛС, содержащее последовательно соединенные блок датчиков, блок формирования сигналов азимутального двоичного кода, сумматор и блок формирования стробов, а также имитатор вращения, который соединен со вторым входом блока формирования азимутального двоичного кода, датчика кода, который соединен со вторым входом сумматора, и блока контроля, который соединен с выходом сумматора.
Блок датчиков преобразует угловое перемещение в дискретную информацию в виде унитарных кодов, поступающих на первый вход блока формирования сигналов азимутального двоичного кода. На второй вход этого блока с имитатора вращения поступают аналогичные унитарные коды, необходимые для работы в режиме имитации вращения антенны. Блок формирования сигналов азимутального двоичного кода формирует двоичный код азимута, который поступает на первый вход сумматора. На второй вход сумматора с датчика кода подается двоичный код поправки. Выходные сигналы сумматора поступают на блок формирования стробов и на блок контроля.
Достоинством устройства-прототипа является возможность его ориентирования с минимальными затратами времени благодаря оперативному вводу двоичного кода поправки и, кроме того, высокая точность преобразования угла. Однако последнее ценное качество может быть реализовано при условии стабильности скорости вращения антенны. Дело в том, что азимутальная информация в РЛС должна быть задержана на время накопления и обработки сигналов в радиолокационном приемнике. Поэтому в код азимута вводится дополнительная угловая поправка, соответствующая известной временной задержке. Практически это выражается в том, что при проведении операции ориентирования код, формируемый устройством преобразования, уменьшают на величину
β3=wt3,
где β3 - величина задержки по углу,
ω - угловая скорость вращения антенны,
t3 - время задержки сигнала в приемнике.
Если скорость вращения антенны нестабильна, то
β3=ω0t3±Δωt3,
где ω0 - среднее значение скорости,
Δω - изменение скорости.
Поскольку в некоторых РЛС величина Δω может достигать 10%, то такого же порядка будет и скоростная ошибка кода азимута. Это существенный недостаток устройства-прототипа.
Техническим результатом предложенного изобретения является повышение точности преобразования углового перемещения за счет устранения скоростной ошибки преобразования.
Технический результат достигается тем, что в устройство для преобразования углового перемещения антенны РЛС, содержащее последовательно соединенные блок датчиков, блок формирования сигналов азимутального двоичного кода и сумматор, объединенные по входу блок формирования стробов, и блок контроля, имитатор вращения, соединенный со вторым входом блока формирования сигналов азимутального двоичного кода, и датчик кода, соединенный со вторым входом сумматора, согласно изобретению введены последовательно соединенные генератор тактовых импульсов, двоичный счетчик, второй сумматор, мультиплексор, оперативное запоминающее устройство и статический регистр, выход которого соединен со входом блока формирования стробов, постоянное запоминающее устройство, соединенное со вторым входом второго сумматора, первый вход которого дополнительно соединен со вторым входом мультиплексора.
Новизна изобретения следует из того, что в описаниях известных устройств отсутствуют сведения об устранении или компенсации скоростной ошибки кода угла.
Анализ известных технических решений показал, что введенные элементы известны сами по себе, однако их совокупное использование позволяет получить новый технический результат, и это дает основания сделать вывод, что предложенное техническое решение соответствует критерию изобретения «изобретательский уровень».
Наличие причинно-следственной связи между совокупностью существенных признаков заявляемого изобретения и достигаемым техническим результатом связано с тем, что замена угловой задержки азимутальной информации на задержку во времени обусловила повышение точности преобразования углового перемещения при нестабильной скорости вращения антенны.
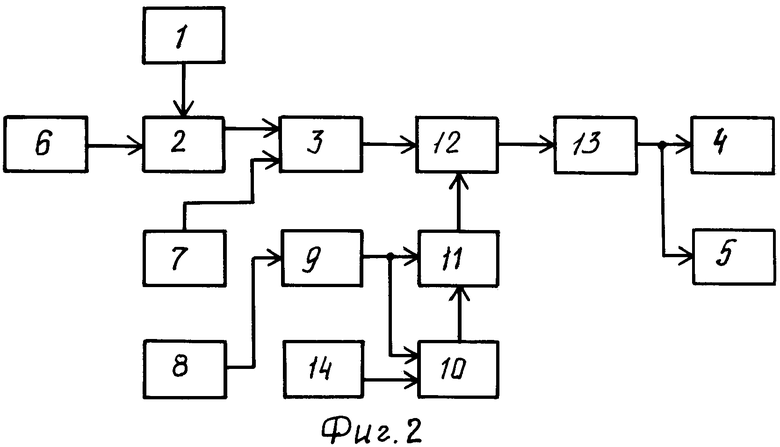
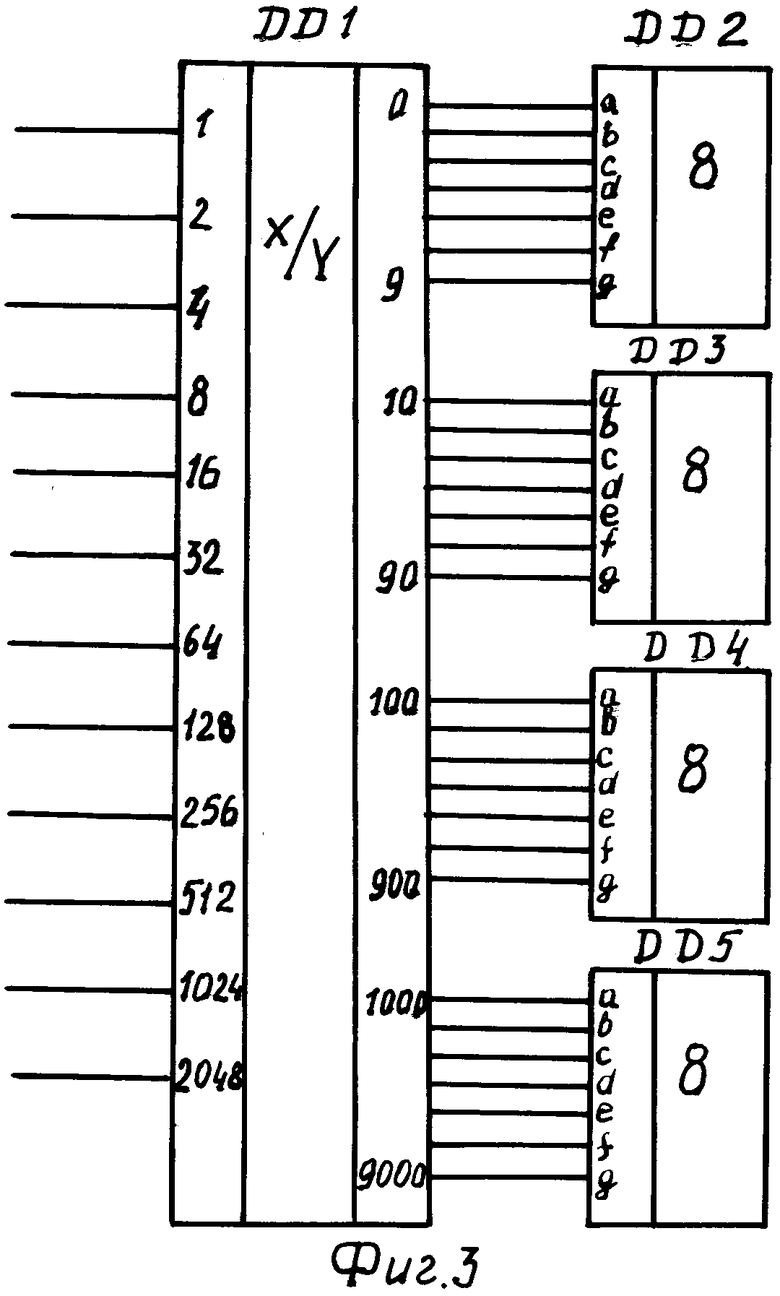
Сущность изобретения поясняется нижеследующим описанием и графическими материалами. На фиг.1 и 2 представлены соответственно устройство преобразования углового перемещения - прототипа и предложенное устройство преобразования углового перемещения, где обозначено:
1 - блок датчиков;
2 - блок формирования сигналов азимутального двоичного кода;
3 - сумматор;
4 - блок формирования стробов;
5 - блок контроля;
6 - имитатор вращения;
7 - датчик кода;
8 - генератор тактовых импульсов;
9 - двоичный счетчик;
10 - второй сумматор;
11 - мультиплексор;
12 - оперативное запоминающее устройство;
13 - статический регистр;
14 - постоянное запоминающее устройство.
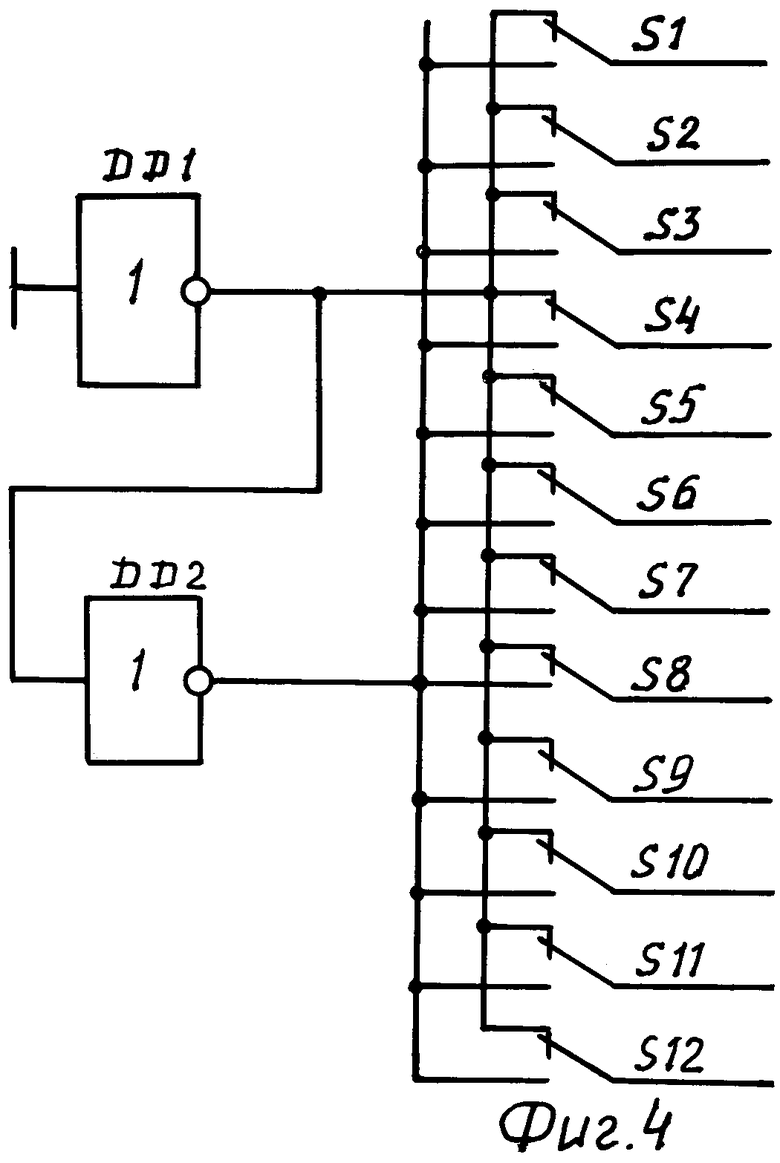
На фиг.3 представлен вариант схемы блока контроля, где обозначено:
DD1 - преобразователь двоичного кода в сигналы семисегментного кода,
DD2-DD5 - цифровые индикаторы кода.
На фиг.4 представлен вариант схемы датчика кода, где обозначено:
DD1 - генератор логической единицы,
DD2 - генератор логического нуля,
S1-S12 - переключатель битов кода.
Предложенное устройство содержит последовательно соединенные блок датчиков 1, блок формирования сигналов азимутального двоичного кода 2 и первый сумматор 3, объединенные по входу блок формирования стробов 4, и блок контроля 5, имитатор вращения 6, соединенный со вторым входом блока формирования сигналов азимутального двоичного кода 2, и датчик кода 7, соединенный со вторым входом тактовых импульсов 8, двоичный счетчик 9, второй сумматор 10, мультиплексор 11, оперативное запоминающее устройство 12 и статический регистр 13, выход которого соединен со входом блока формирования стробов 4, постоянное запоминающее устройство 14, соединенное со вторым входом второго сумматора 10, первый вход которого дополнительно соединен со вторым входом мультиплексора 11.
Вариант схемы блока контроля, приведенный на фиг.3, содержит преобразователь двоичного кода в сигналы семисегментного кода со входами для подключения двоичного кода и цифровые индикаторы кода DD2-DD5, входы которых подключены к выходам преобразователя DD1.
Вариант схемы датчика кода, приведенной на фиг.4, содержит генератор логической единицы, генераторы логического нуля на ИМС, выполняющих функцию НЕ, и переключателей битов двоичного кода, коммутирующих сигналы логического нуля и логической единицы.
Предложенное устройство работает следующим образом.
Блок датчиков 1 преобразует угловое перемещение антенны (на фигурах не показана) в дискретную информацию в виде импульсных сигналов, которые поступают на первый вход блока формирования сигналов, которые поступают на первый вход блока формирования сигналов азимутального двоичного кода 2. На второй вход этого блока с имитатора вращения 6 поступают аналогичные импульсные сигналы, необходимые для работы в режиме имитации вращения антенны. Блок формирования сигналов азимутального двоичного кода 2 формирует двоичный код азимута, который поступает на первый вход сумматора 3. На второй вход сумматора 3 с датчика кода 7 подается двоичный код поправки для «привязки» азимутальной информации к истинному Северу. С выхода сумматора 3 азимутальный код поступает на оперативное запоминающее устройство 12 (ОЗУ), где хранится в течение времени t3. Запись и считывание информации ОЗУ 12 осуществляется по сигналам с мультиплексора 11. Код адреса записи поступает на мультиплексор 11 с двоичного счетчика 9, на вход которого поступают импульсы с генератора тактовых импульсов 8. Код адреса считывания на мультиплексор 11 подается со второго сумматора 10, который производит сложение текущего кода счетчика 9 с кодом, записанным в постоянном запоминающем устройстве 14 (ПЗУ). Код ПЗУ представляет собой цифровой эквивалент времени задержки t3.
Таким образом, азимутальная информация, считываемая с ОЗУ 12, оказывается задержанной на время t3 по отношению к информации с выхода сумматора 3. Статический регистр 13 хранит азимутальную информацию в промежутках времени между считыванием кода с ОЗУ 12. Код азимута с выхода статического регистра 13 поступает на блок формирования стробов 4 и на блок контроля 5.
Такая схема построения устройства преобразования позволяет устранить необходимость введения добавочного кода информации для учета задержки азимутальной информации на время накопления и обработки сигнала в тракте радиолокационного приемника и, следовательно, повысить точность преобразования углового перемещения антенны при нестабильной скорости ее вращения.
Техническим результатом предлагаемого изобретения является повышение точности преобразования углового перемещения за счет устранения скоростной ошибки двоичного кода угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ УГЛОВОГО ПЕРЕМЕЩЕНИЯ АНТЕННЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1982 |
|
SU1840541A1 |
| СИСТЕМА ПРЕОБРАЗОВАНИЯ УГЛОВОГО ПЕРЕМЕЩЕНИЯ АНТЕННЫ РЛС | 2003 |
|
RU2248092C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА АНТЕННЫ | 1978 |
|
SU1840485A1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| ПРИЕМНОЕ УСТРОЙСТВО СО СТАБИЛИЗАЦИЕЙ УРОВНЯ ЛОЖНЫХ ТРЕВОГ | 1990 |
|
RU2226703C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| СЕКТОРНЫЙ ИНДИКАТОР МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1979 |
|
SU1840910A1 |
Изобретение относится к системам управления и регулирования неэлектрических величин. Технический результат заключается в повышении точности преобразования углового перемещения за счет устранения скоростной ошибки преобразования. Устройство содержит блок датчиков, блок формирования сигналов азимутального двоичного кода, два сумматора, блок формирования стробов, блок контроля, имитатор вращения, датчик кода поправки, генератор тактовых импульсов, двоичный счетчик, мультиплексор, оперативное и постоянное запоминающие устройства, статический регистр. 4 ил.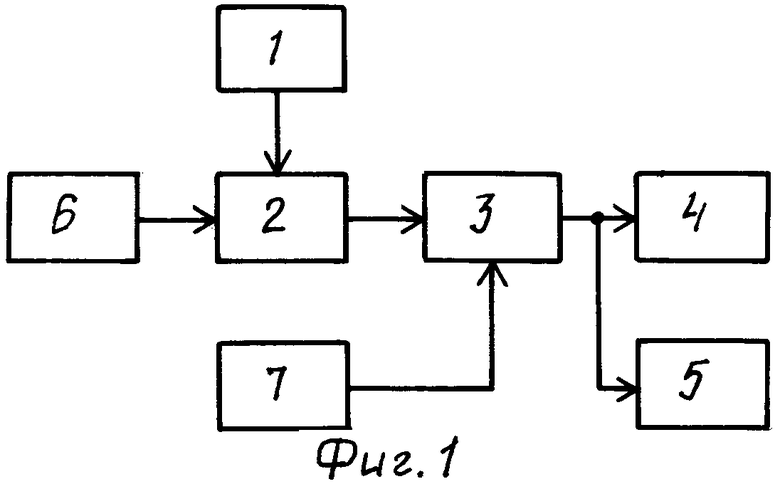
Устройство для преобразования углового перемещения антенны радиолокационной станции, содержащее последовательно соединенные блок датчиков, блок формирования сигналов азимутального двоичного кода и сумматор, объединенные по входу блок формирования стробов и блок контроля, имитатор вращения, соединенный со вторым входом блока формирования сигналов азимутального двоичного кода, и датчик кода поправки, соединенный со вторым входом сумматора, отличающееся тем, что в устройство введены последовательно соединенные генератор тактовых импульсов, двоичный счетчик, второй сумматор, мультиплексор, оперативное запоминающее устройство, на которое с сумматора поступает азимутальный код, и статический регистр, выход которого соединен с входом блока формирования стробов, постоянное запоминающее устройство, соединенное со вторым входом второго сумматора, первый вход которого дополнительно соединен со вторым входом мультиплексора.
| Датчик положения вала | 1986 |
|
SU1320652A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1213543A1 |
| Устройство преобразования угловых величин в код | 1976 |
|
SU595756A1 |
| US 4853839 A, 01.08.1989. | |||

