Изобретение относится к области радиолокационной техники и может быть использовано в радиолокационных станциях (РЛС).
Известна система преобразования углового перемещения антенны РЛС по а.с. 129123, содержащая блок датчиков со входом для подключения вала антенны и последовательно соединенные с ним преобразователь угловой информации и блок формирования стробов. Блок датчиков преобразует угловое перемещение вала антенны в азимутальную информацию в виде двух последовательностей импульсов: один импульс и 2n импульсов за оборот вала антенны, где n - число разрядов кода угла. Из этих импульсных последовательностей преобразователь угловой информации, представляющий собой двоичный счетчик импульсов, формирует двоичный код угла, поступающий на блок формирования стробов. Недостатком системы является то, что она не позволяет достаточно быстро и просто проводить операцию ориентирования РЛС, а также наличие в формируемом ею коде угла неучтенной функциональной составляющей угловой ошибки, которая в пределах каждого оборота вала антенны изменяется в соответствии с законом изменения ошибки кинематической цепи, связывающей блок датчиков с валом антенны. Ошибка кинематической цепи может быть значительной и достигать 30-40% от общей ошибки преобразования угла, что реально приводит к снижению точности преобразования углового перемещения антенны РЛС.
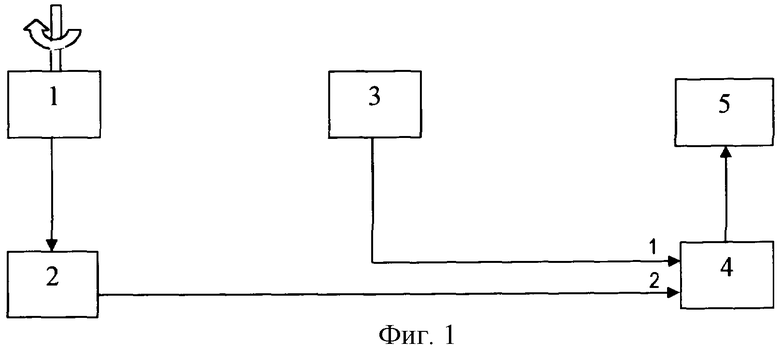
Наиболее близкой по технической сущности к предлагаемой является система преобразования угловой информации по а.с. 184203, которая принята в качестве прототипа. Система содержит блок датчиков, кинематически связанный с валом антенны, преобразователь угловой информации, сумматор, датчик кода и блок контроля. Выход блока датчиков соединен с входом преобразователя угловой информации, выход датчика кода соединен с первым входом сумматора, второй вход которого соединен с выходом преобразователя угловой информации, а выход - с блоком контроля. Данная система позволяет упростить операцию ориентирования РЛС и, значит, сократить время ориентирования. Недостатком этой системы, так же как и системы -аналога, является наличие в формируемом ею коде угла неучтенной функциональной составляющей угловой ошибки.
Техническим результатом изобретения является повышение точности преобразования углового перемещения антенны РЛС за счет исключения функциональной составляющей ошибки преобразования, вызванной погрешностями кинематической цепи.
Для достижения указанного технического результата в систему-прототип, которая содержит блок датчиков, кинематически связанный с валом антенны, преобразователь угловой информации, сумматор, датчик кода и блок контроля, где выход блока датчиков соединен со входом преобразователя угловой информации, датчик кода соединен с первым входом сумматора, выход которого соединен с блоком контроля, дополнительно введены генератор тактовых импульсов, схема задержки, двоичный счетчик импульсов, первый и второй статические регистры, линейка цифровых компараторов и оперативное запоминающее устройство, причем первый и второй выходы преобразователя угловой информации соединены с первым и вторым входами оперативного запоминающего устройства, а третий выход - с первыми входами первого и второго статических регистров и со входом схемы задержки, выход которой соединен с первым входом двоичного счетчика импульсов, второй вход которого соединен с выходом генератора тактовых импульсов и вторым входом второго статического регистра, а выход - со вторым входом первого статического регистра и первым входом линейки цифровых компараторов, второй вход которой соединен с выходом первого статического регистра, а выход - с третьим входом второго статического регистра, выход которого соединен с третьим входом оперативного запоминающего устройства, выход которого соединен со вторым входом сумматора.
Сущность изобретения поясняется нижеследующим описанием и чертежами, на которых представлены:
фиг.1 - структурная схема прототипа;
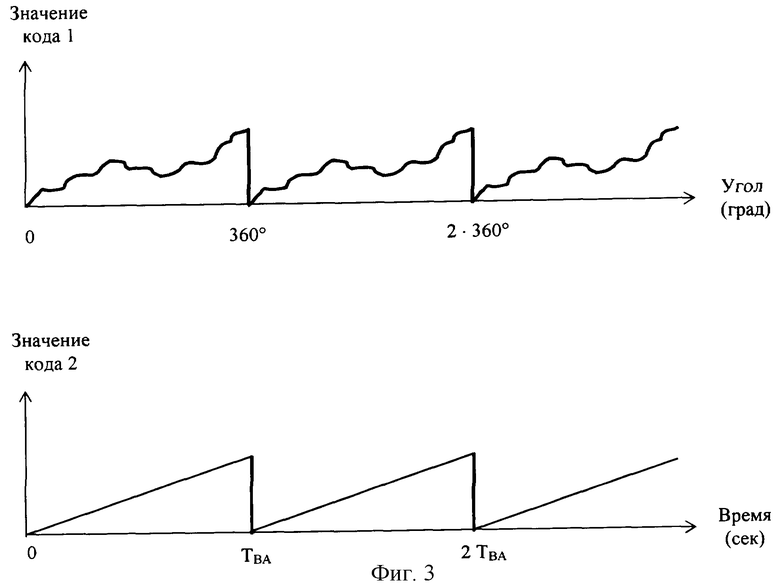
фиг.2 - структурная схема предлагаемой системы;
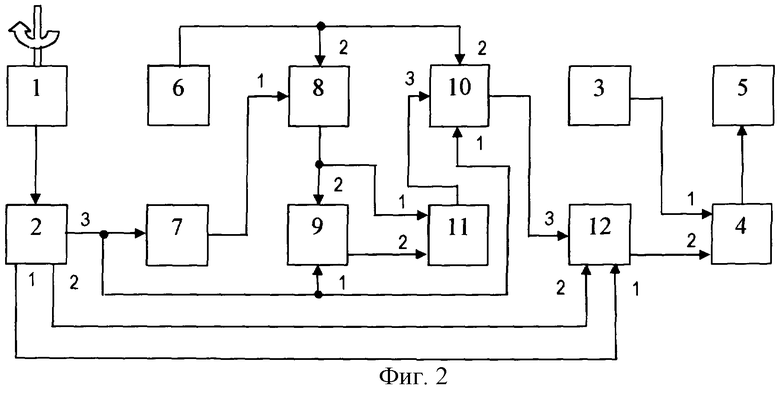
фиг.3 - временные диаграммы сигналов системы.
На фиг.1, 2 приняты следующие обозначения:
1 - блок датчиков;
2 - преобразователь угловой информации;
3 - датчик кода;
4 - сумматор;
5 - блок контроля;
6 - генератор тактовых импульсов;
7 - схема задержки;
8 - двоичный счетчик импульсов;
9, 10 - первый и второй статические регистры;
11 - линейка цифровых компараторов;
12 - оперативное запоминающее устройство.
На фиг.3 приняты следующие обозначения:
Значение кода 1 - аналоговое представление кода на выходе преобразователя угловой информации;
Значение кода 2 - аналоговое представление кода на выходе оперативного запоминающего устройства;
ТВА - период вращения антенны.
Предложенная система преобразования углового перемещения антенны РЛС (фиг.2) содержит блок датчиков 1, кинематически связанный с валом антенны, преобразователь угловой информации 2, датчик кода 3, сумматор 4, блок контроля 5, генератор тактовых импульсов 6, схему задержки 7, двоичный счетчик импульсов 8, статические регистры 9 и 10, линейку цифровых компараторов 11 и оперативное запоминающее устройство 12, причем выход блока датчиков 1 соединен со входом преобразователя угловой информации 2, датчик кода 3 соединен с первым входом сумматора 4, выход которого соединен со входом блока контроля 5, первый и второй выходы преобразователя угловой информации 2 соединены соответственно с первым и вторым входами оперативного запоминающего устройства 12, а третий выход - с первыми входами статических регистров 9 и 10 и со входом схемы задержки 7, выход которой соединен с первым входом двоичного счетчика импульсов 8, второй вход которого соединен с выходом генератора тактовых импульсов 6 и вторым входом второго статического регистра 10, а выход - со вторым входом статического регистра 9 и первым входом линейки цифровых компараторов 11, второй вход которой соединен с выходом статического регистра 9, а выход - с третьим входом статического регистра 10, выход которого соединен с третьим входом оперативного запоминающего устройства 12, выход которого соединен со вторым входом сумматора 4.
Система работает следующим образом.
Блок датчиков 1, кинематически связанный с валом антенны, формирует информацию об угле поворота антенны, которая поступает на вход преобразователя угловой информации 2 и преобразуется в цифровой n-разрядный код угла на выходе 1 и в две последовательности импульсов: угловые импульсы (УИ ) на выходе 2 - в количестве 2n импульсов за каждый оборот антенны, где n - заданное число разрядов кода угла, и опорные импульсы (ОИ) на выходе 3 - по одному импульсу за оборот антенны.
Импульсы с генератора тактовых импульсов (ТИ) 6 поступают на двоичный счетчик импульсов 8 и регистр 10. Частота импульсов ТИ должна быть в несколько раз больше частоты импульсов УИ. Счетчик импульсов 8 сбрасывается в нулевое состояние один раз за оборот антенны опорным импульсом ОИ, поступающим на его вход 1 через схему задержки 7. При неизменной скорости вращения антенны по завершении каждого ее оборота в счетчике устанавливается цифровой код, соответствующий количеству поступивших на вход 2 счетчика тактовых импульсов (ТИ). При переключении скорости вращения антенны соответственно изменяется и значение цифрового кода в пределах каждого цикла счета.
Статический регистр 9 хранит в течение одного оборота антенны цифровой код, поступивший на его вход 2 с двоичного счетчика 8. Запись кода в регистр 9 производится по сигналу ОИ, который подается на этот регистр по входу 1. Код регистра 9 выдается на вход 2 линейки цифровых компараторов 11. Количество компараторов в линейке равно заданному числу разрядов выходного кода угла. Компараторы предназначены для поразрядного сравнения значений текущего кода, поступающего на вход 1 со счетчика тактовых импульсов 8, с цифровым порогом каждого компаратора линейки.
Цифровые пороги для компараторов задаются следующим образом.
По завершении каждого оборота антенны в регистре 9 записан и хранится цифровой код, равный по значению числу тактовых импульсов в одном периоде вращения антенны. Путем деления этого кода на 2 формируется цифровой порог компаратора старшего (n-1) разряда преобразованного кода. Делением исходного кода на 4, 8, 16 и т.д. задаются цифровые пороги всех остальных компараторов вплоть до компаратора младшего разряда. Операция деления исходного кода осуществляется уменьшением веса разрядов при поразрядном монтажном сдвиге выходов кода в сторону младших разрядов.
В момент сравнения текущего кода от двоичного счетчика импульсов 8 с цифровым порогом какого-либо компаратора этот компаратор срабатывает, выдавая импульс сброса в ноль всех младших компараторов линейки и импульс установки в единицу на вход 3 соответствующего разряда регистра 10. Запись кода в регистр 10 производится по сигналу ТИ, подаваемому на вход 2 регистра 10. Общий сброс регистра в ноль осуществляется сигналом ОИ, поступающим на вход 1 этого регистра.
Итак, в регистре 10 сформирован цифровой код угла заданной разрядности. Этот код подается на информационный вход 3 оперативного запоминающего устройства 12, на адресный вход 1 которого поступает код угла с преобразователя угловой информации 2. Запись информации в оперативное запоминающее устройство 12 осуществляется по входу 2 сигналами УИ с преобразователя угловой информации 2.
На фиг.3 приведен вид кодов, поступающих на оперативное запоминающее устройство 12, в их аналоговом выражении. Каждому значению кода 1 - коду адреса на входе 1 соответствует значение кода 2 - линейно изменяющегося кода угла на входе 3. С выхода оперативного запоминающего устройства 12 линейно изменяющийся код 2 поступает на второй вход сумматора 4, где складывается с кодом ориентирования, поступающим на его вход 1 с датчика кода 3. С выхода сумматора 4 ориентированный код угла, представляющий собой код азимута антенны РЛС, выдается на блок контроля 5.
Таким образом, введение в систему, которая содержит блок датчиков, кинематически связанный с валом антенны, преобразователь угловой информации, сумматор, датчик кода и блок контроля, где выход блока датчиков соединен со входом преобразователя угловой информации, датчик кода соединен с первым входом сумматора, выход которого соединен с блоком контроля, генератора тактовых импульсов, схемы задержки, двоичного счетчика импульсов, двух статических регистров, линейки цифровых компараторов, оперативного запоминающего устройства, где первый и второй выходы преобразователя угловой информации соединены соответственно с первым и вторым входами оперативного запоминающего устройства, третий выход - с первыми входами первого и второго статических регистров и со входом схемы задержки, выход которой соединен с первым входом двоичного счетчика импульсов, второй вход которого соединен с выходом генератора тактовых импульсов и вторым входом второго статического регистра, а выход - со вторым входом первого статического регистра и первым входом линейки цифровых компараторов, второй вход которой соединен с выходом первого статического регистра, а выход - с третьим входом второго статического регистра, выход которого соединен с третьим входом оперативного запоминающего устройства, выход которого соединен со вторым входом сумматора, позволяет уменьшить общую ошибку преобразования угла поворота антенны РЛС путем исключения неучтенной функциональной составляющей угловой ошибки, которая обусловлена погрешностями кинематической цепи, связывающей блок датчиков с валом антенны.
Схема предложенной системы преобразования углового перемещения антенны РЛС может быть реализована на следующих устройствах.
В качестве блока датчиков (1) может быть применен блок аналоговых датчиков с использованием сельсинов или вращающихся трансформаторов. В этом качестве может также быть использован, например, преобразователь угловой фотоэлектрический типа ПУФ-6П2 ДИВГ.421242.002. В зависимости от типа применяемого датчика преобразователь угловой информации (2) можно построить либо в виде аналого-цифрового преобразователя типа АЦП ВТ, либо в виде двоичного счетчика импульсов, например, на микросхемах 564 ИЕ10. Сумматор (4) можно построить на микросхемах 564 ИМ1. Датчиком кода (3) может быть простое ПЗУ из набора переключателей сигналов "лог.0" и ″лог.1″. В качестве блока контроля (5) можно использовать излучающие индикаторы в количестве, равном числу разрядов контролируемого кода. Генератор тактовых импульсов (6) можно построить на микросхеме 564 ГГ1, двоичный счетчик импульсов (8) - на микросхемах 564 ИЕ10, схему задержки (7) - на микросхемах 564 ЛН2. Статический регистр (9) можно реализовать на микросхемах 564 ИР2, статический регистр (10) - на микросхемах 564 ТВ2. Линейку цифровых компараторов (11) можно построить на микросхемах 564 ИП2. В качестве оперативного запоминающего устройства (12) может быть использовано ОЗУ на микросхемах типа 541 РУ1.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ УГЛОВОГО ПЕРЕМЕЩЕНИЯ АНТЕННЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1992 |
|
RU2254605C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1995 |
|
RU2096801C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037842C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2170444C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| Устройство преобразования углового перемещения антенны РЛС | 2017 |
|
RU2661799C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2131612C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841103A1 |
Изобретение относится к области радиолокационной техники и может быть использовано в радиолокационных станциях (РЛС). Техническим результатом изобретения является повышение точности преобразования углового перемещения антенны РЛС за счет исключения функциональной составляющей ошибки преобразования, вызванной погрешностями кинематической цепи. Указанный результат достигается за счет то, что система содержит блок датчиков, кинематически связанный с валом антенны, преобразователь угловой информации, датчик кода, сумматор, блок контроля, генератор тактовых импульсов, схему задержки, двоичный счетчик импульсов, два статических регистра, линейку цифровых компараторов и оперативное запоминающее устройство. 3 ил.
Система преобразования углового перемещения антенны РЛС, содержащая блок датчиков, кинематически связанный с валом антенны, преобразователь угловой информации, сумматор, датчик кода и блок контроля, причем выход блока датчиков соединен со входом преобразователя угловой информации, датчик кода соединен с первым входом сумматора, выход которого соединен с блоком контроля, отличающаяся тем, что в нее введены генератор тактовых импульсов, схема задержки, двоичный счетчик импульсов, первый и второй статические регистры, линейка цифровых компараторов и оперативное запоминающее устройство, причем первый и второй выходы преобразователя угловой информации соединены соответственно с первым и вторым входами оперативного запоминающего устройства, третий выход - с первыми входами первого и второго статических регистров и со входом схемы задержки, выход которой соединен с первым входом двоичного счетчика импульсов, второй вход которого соединен с выходом генератора тактовых импульсов и вторым входом второго статического регистра, а выход - со вторым входом первого статического регистра и первым входом линейки цифровых компараторов, второй вход которой соединен с выходом первого статического регистра, а выход - с третьим входом второго статического регистра, выход которого соединен с третьим входом оперативного запоминающего устройства, выход которого соединен со вторым входом сумматора.
| Преобразователь угла поворота вала в код | 1990 |
|
SU1742996A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В МНОГОЛУЧЕВЫХ РЛС | 1993 |
|
RU2084915C1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2024907C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |

