Изобретение относится к области радиолокационной техники и предназначено для повышения угловой разрешающей способности РЛС и ее регулировки при одновременном подавлении боковых лепестков диаграммы направленности.
Изобретение может быть использовано в моноимпульсных (многоканальных) РЛС некогерентного и когерентного типа, размещаемых как на движущихся, так и на неподвижных объектах.
Известны следующие РЛС, в которых обеспечивается возможность повышения угловой разрешающей способности и ее регулирование:
- бортовая РЛС когерентного типа с синтезированием искусственного раскрыва антенны (режим CAP) (РЛС бокового обзора. Под ред. А.П.Реутова, М.: Сов. радио, 1970, с.241-325);
- РЛС с излучением на широкую ДНА и приемом на одну из более узких диаграмм, сформированных приемной антенной, например интерферометрического типа с последующей аддитивной или мультипликативной обработкой (РЛС бокового обзора. Под ред. А.П.Реутова, М.: Сов. радио, 1970, с.83-96).
Известные РЛС (аналоги) обладают следующими недостатками:
- РЛС с использованием режима CAP является очень сложным устройством, т.к. она должна быть когерентной и, следовательно, обладать высокой стабильностью частоты излучаемых сигналов, идентичностью характеристик приемных устройств и иметь в своем составе сложные устройства когерентной обработки сигналов. К недостаткам следует отнести необходимость перемещения РЛС для обеспечения режима CAP, а также задержку в выдаче информации, связанной с временем перемещения носителя РЛС на участке траектории, который требуется для формирования искусственного раскрыва ДНА. При этом время обработки информации возрастает при приближении ДНА к вектору скорости носителя. Получение эффекта увеличения угловой разрешающей способности практически невозможно в секторе ±10° относительно вектора скорости.
- РЛС с приемом на одну из диаграмм многолепестковой приемной антенны обладает недостатком, заключающемся в снижении коэффициента усиления системы, неоднозначности отсчета и сложности системы при устранении этих недостатков.
В качестве прототипа по максимальному количеству сходных существенных признаков используется моноимпульсная РЛС, приведенная в патенте США №3212089, кл. 343-16, в которой обеспечивается повышение разрешающей способности по углу за счет обработки высокостабильных (когерентных) суммарного и разностного сигналов с помощью двухканального фазового детектора, сумматора и ограничителя. Одновременно осуществляется компенсация боковых лепестков диаграммы направленности и регулировка угловой разрешающей способности.
Известная РЛС (фиг.1) содержит антенну моноимпульсного типа 1, формирователь суммарного и разностного сигналов 2, переключатель "прием-передача" 3, передатчик 4, смесители суммарного и разностного сигналов 5, местный гетеродин 6, УПЧ суммарного и разностного сигналов 7, двойной фазовый детектор 8, сумматор 9, амплитудный детектор суммарного сигнала 10, ограничители по минимуму суммарного и результирующего сигналов 11, при этом выходы антенны 1 соединены с входами формирователя суммарного и разностного сигналов, первый выход которого подключен к последовательно соединенным смесителю разностного сигнала 5, УПЧ разностного сигнала 7, двойному фазовому детектору 8, сумматору 9 и ограничителю по минимуму результирующего сигнала 11, а второй выход формирователя суммарного и разностного сигналов 2 соединен со входом переключателя "прием-передача" 3, выход которого подключен к последовательно соединенным смесителю суммарного сигнала 5, УПЧ суммарного сигнала 7, амплитудному детектору суммарного сигнала 10 и ограничителю по минимуму суммарного сигнала 11, при этом выход УПЧ суммарного сигнала подключен также ко вторым входам двойного фазового детектора 8 и сумматора 9, выходы местного гетеродина 6 подключены ко вторым входам смесителей суммарного и разностного сигналов 6, выход передатчика 4 подключен к переключателю "прием-передача", а выходы ограничителей по минимуму суммарного и результирующего сигналов являются выходами на индикаторы или вычислители для определения координат целей.
Недостаток РЛС, принятой за прототип, заключается в ее сложности. Известная РЛС является когерентной, поэтому в ее состав входят сложный передатчик, обеспечивающий формирование высокостабильных СВЧ сигналов, двухканальное приемное устройство и двойной фазовый детектор, обладающие высокостабильными характеристиками, обеспечивающими допустимую (не более 30°) разность фаз принятых сигналов суммарного и разностного каналов. Реализация этих требований влечет за собой сложность, большие габариты блоков и их стоимость. К недостаткам можно отнести отсутствие унификации приемных каналов многоканальной РЛС, т.к. в суммарный канал входит амплитудный детектор, а в разностный канал фазовый детектор.
Целью изобретения является увеличение точности определения угловых координат целей некогерентной РЛС в режиме обзора.
Сущность изобретения заключается в том, что моноимпульсная РЛС, содержащая антенну моноимпульсного типа, формировать суммарного и разностного сигналов, переключатель "прием-передача", передатчик, смесители суммарного и разностного сигналов, местный гетеродин, УПЧ суммарного и разностного сигналов, амплитудный детектор суммарного сигнала, ограничители по минимуму суммарного и результирующего сигналов и соответствующие связи, снабжена амплитудным детектором разностного сигнала, видеоусилителем с регулируемым коэффициентом усиления и узлом вычитания, при этом УПЧ разностного сигнала соединен со входом амплитудного детектора разностного сигнала, выход которого соединен со входом видеусилителя с регулируемым коэффициентом усиления, выход которого соединен со входом узла вычитания, второй вход которого соединен с выходом амплитудного детектора суммарного канала, а выход узла вычитания соединен со входом ограничителя по минимуму результирующего сигнала, выход которого является выходом на индикатор или вычислительное устройство для определения координат объектов.
Сущность изобретения поясняется чертежами, где на фиг.1 приведена схема РЛС, принятая за прототип, на фиг.2 - схема предложенного радиолокационного устройства, на фиг.3 приведены диаграммы направленности на выходах формирователя суммарного FΣ(θ) и разностного FΔ(θ) сигналов. На фиг.4 представлены диаграммы направленности на выходах амплитудных детекторов суммарного FΣ(θ) и разностного FΔ(θ) сигналов. На фиг.5 представлены диаграммы направленности на выходах узла вычитания и ограничителя по минимуму результирующего сигнала F(θ)=FΣ(θ)-K·FΔ(θ)
На фиг.6 представлены экспериментальные диаграммы направленности FΣ(θ) и FΔ(θ), измеренные на выходах амплитудных детекторов соответственно суммарного и разностного сигналов, и диаграмма направленности F(θ)=FΣ(θ)-K·FΔ(θ), измеренная на выходе ограничителя по минимуму результирующего сигнала при различных значениях коэффициента усиления K видеоусилителя.
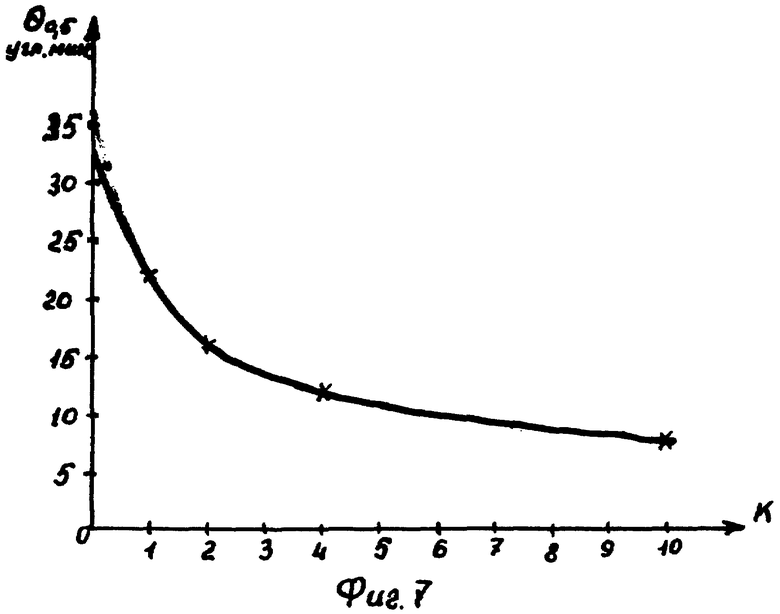
На фиг.7 приведена экспериментальная зависимость угловой разрешающей способности исследуемой РЛС от величины коэффициента K видеоусилителя.
В известном техническом решении признаков, сходных с отличительными признаками заявленного технического решения, не обнаружено, вследствие чего можно считать, что предлагаемое техническое решение обладает существенными отличиями.
Предлагаемое радиолокационное устройство (фиг.2) содержит:
- антенну моноимпульсного типа 1,
- формирователь суммарного FΣ(θ) и разностного FΔ(θ) сигналов 2,
- переключатель "прием-передача" 3,
- передатчик 4,
- смесители суммарного и разностного сигналов 5,
- местный гетеродин 6,
- УЧП суммарного и разностного сигналов 7,
- амплитудный детектор суммарного сигнала 10,
- ограничители по минимуму суммарного и результирующего сигналов 11,
- амплитудный детектор разностного сигнала 12,
- видеоусилитель с регулируемым коэффициентом усиления 13,
- узел вычитания 14.
При этом выходы антенны 1 соединены со входами формирователя суммарного FΣ(θ) и разностного FΔ(θ) сигналов 2, первый выход которого подключен к последовательно соединенным смесителю разностного сигнала 5, второй вход которого соединен с выходом местного гетеродина 6, УПЧ разностного сигнала 7, амплитудным детектором разностного сигнала 12, видеоусилителем с регулируемым коэффициентом усиления 13, узлом вычитания 14 и ограничителем по минимуму результирующего сигнала 11, а второй выход формирователя суммарного FΣ(θ) и разностного FΔ(θ) сигналов 2 соединен с переключателем "прием-передача" 3, второй вход которого соединен с выходом передатчика 4, а выход подключен к соединенным последовательно смесителю суммарного сигнала 5, второй вход которого соединен с выходом местного гетеродина 6, УПЧ суммарного сигнала 7, амплитудным детектором суммарного сигнала 10, выход которого соединен с ограничителем по минимуму суммарного сигнала 11 и со вторым входом узла вычитания 14, при этом выходы ограничителей по минимуму суммарного и результирующего сигналов являются выходами на индикаторы или вычислители.
Работа предлагаемого радиолокационного устройства происходит следующим образом. Зондирующий сигнал из передатчика 4 через переключатель "прием-передача" 3 и формирователь суммарного и разностного сигналов 2 поступает на антенну моноимпульсного типа 1 и излучается в пространство. Принятые эхо-сигналы с выходов антенны моноимпульсного типа 1 поступают на формирователь суммарного и разностного сигналов 2, в качестве которого используется, как правило, волноводный мост. Суммарный сигнал FΣ(θ) с первого выхода формирователя суммарного и разностного сигналов 2 поступает через переключатель "прием-передача" 3 на смеситель суммарного сигнала 5. Разностный сигнал FΔ(θ) со второго выхода формирователя суммарного и разностного сигналов 2 поступает на смеситель разностного сигнала 5. На вторые входы смесителей суммарного и разностного сигналов 5 поступают СВЧ колебания местного гетеродина 6. В результате на выходах смесителей 5 образуются сигналы промежуточной частоты FΣ(θ) и FΔ(θ), которые усиливаются УПЧ суммарного и разностного сигналов 7 и далее детектируются амплитудными детекторами суммарного 10 и разностного 12 сигналов. УПЧ-7 и амплитудные детекторы 10 и 12 в обоих каналах имеют идентичные характеристики. С выхода амплитудного детектора суммарного сигнала 10 видеосигнал FΣ(θ) подается на вход узла вычитания 14, а с выхода амплитудного детектора разностного сигнала 12 видеосигнал FΔ подается на вход видеоусилителя с регулируемым коэффициентом усиления K 13 и далее поступает на второй вход узла вычитания 14, где осуществляется вычитание разностного сигнала из суммарного. Таким образом, на выходе узла вычитания 14 образуется видеосигнал F(θ)=FΣ(θ)-K·FΔ(θ) В результате этой операции получается эффект увеличения угловой разрешающей способности РЛС и осуществляется компенсация боковых лепестков диаграммы направленности. Изменение величины угловой разрешающей способности и степени компенсации боковых лепестков осуществляется путем изменения коэффициента усиления K видеоусилителя 13. Результирующий "сжатый" сигнал разности F(θ)=FΣ(θ)-K·FΔ(θ) подается на ограничитель по минимуму результирующего сигнала 11, где ограничивается по уровню шумов. Далее он выводится на индикатор или вычислитель для наблюдения отметок целей и вычисления их координат. В случае необходимости на индикатор или вычислитель может быть выведен суммарный видеосигнал FΣ(θ) с выхода амплитудного детектора суммарного канала 10, ограниченный по уровню шумов ограничителем по минимуму суммарного сигнала 11. При этом возможно наблюдение отметок от целей с использованием суммарной диаграммы направленности без повышения угловой разрешающей способности и при соответствующем уровне боковых лепестков.
Эффект повышения угловой разрешающей способности радиолокационного устройства поясняется диаграммами, приведенными на фиг.3-5. На этих диаграммах по оси F(θ) откладываются значения нормированной мощности сигнала относительно максимального значения мощности суммарного сигнала в направлении оси пеленга (θ=0), а по оси θ - значение угла относительно оси пеленга.
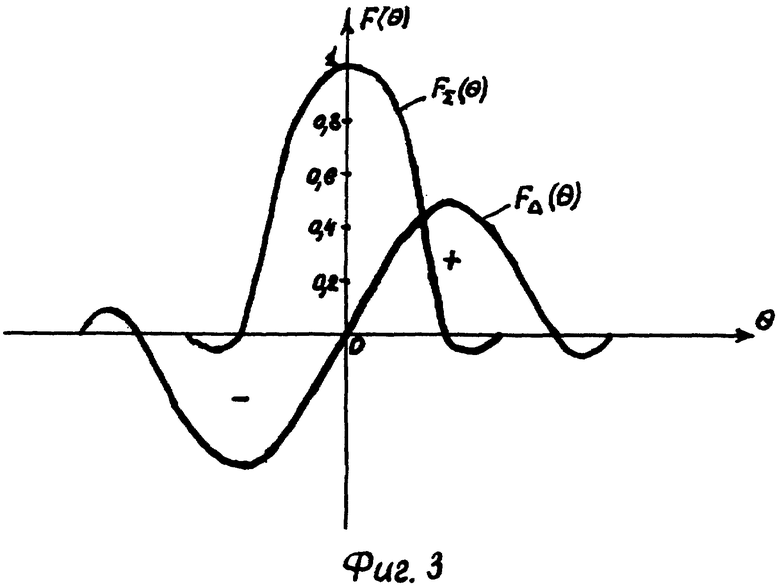
Диаграммы направленности на выходах формирователя суммарного FΣ(θ) и разностного FΣ(θ) сигналов 2 приведены на фиг.3. Из приведенных графиков следует, что диаграмма направленности в канале суммарного сигнала FΣ(θ) является четной функцией относительно оси пеленга, а диаграмма направленности в канале разностного сигнала FΔ(θ) - нечетной функций относительно оси пеленга.
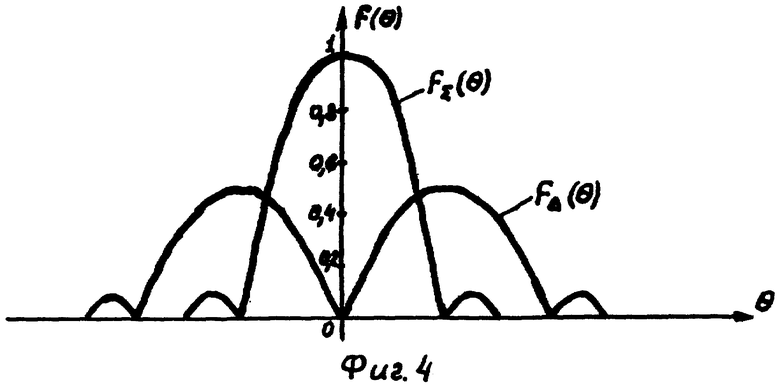
Диаграммы направленности FΣ(θ) на выходе амплитудного детектора суммарного сигнала 10 и FΔ(θ) на выходе амплитудного детектора разностного сигнала 12 представлены на фиг.4. В результате амплитудного детектирования обе функции FΣ(θ) и FΔ(θ) становятся четными относительно оси пеленга (θ=0).
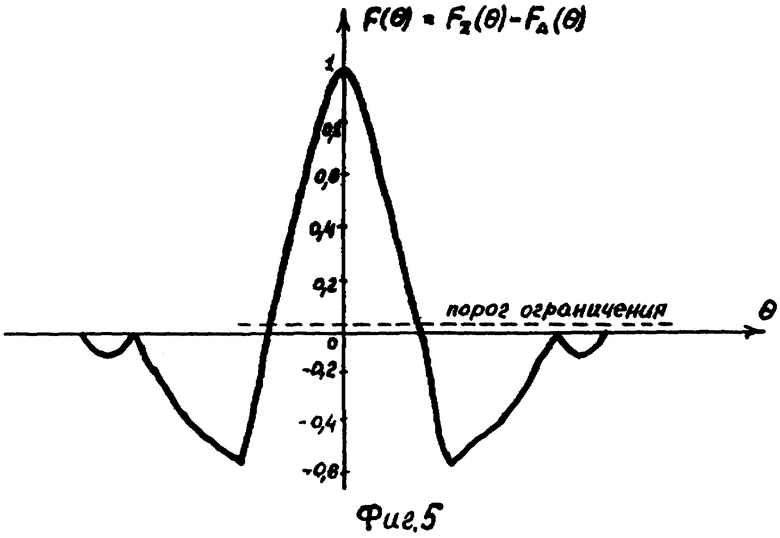
В результате проведенной в узле вычитания 14 операции вычитания разностного сигнала из суммарного, результирующая диаграмма направленности F(θ)=FΣ(θ)-K·FΔ(θ) на его выходе (фиг.5) представляет собой четную функцию относительно оси пеленга, имеющую лепестки в области отрицательных значений и "сжатую" в области положительных значений по угловой оси θ в сравнении с диаграммой направленности FΣ(θ) в канале суммарного сигнала. На выходе ограничителя по минимуму результирующего сигнала 11 функция F(θ)=FΣ(θ)-K·FΔ(θ) ограничивается снизу установленным по уровню шумов порогом ограничения и результирующая диаграмма направленности представляет собой часть кривой F(θ) (фиг.5), расположенную выше порога ограничения. Таким образом осуществляется обужение основного лепестка диаграммы направленности по угловой координате θ и компенсация боковых лепестков.
Для оценки характеристик предлагаемого радиолокационного устройства были проведены экспериментальные исследования, результаты которых представлены на фиг.6 и фиг.7.
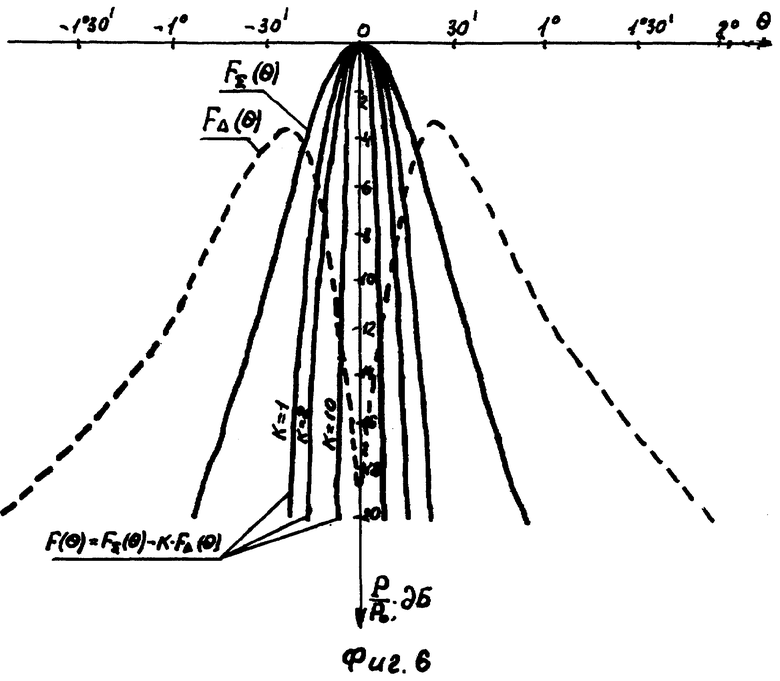
Экспериментальные диаграммы направленности FΣ(θ), FΔ(θ) и F(θ)=FΣ(θ)-K·FΔ(θ) (фиг.6) измерены соответственно на выходах амплитудного детектора суммарного сигнала 10, амплитудного детектора разностного сигнала 12 и ограничителя по минимуму результирующего сигнала 11. Диаграмма направленности F(θ)=FΣ(θ)-K·FΔ(θ) измерялась при коэффициентах усиления видеоусилителя 13 K=1, K=2 и K=10. Из приведенных на фиг.6 графиков следует, что ширина результирующей диаграммы направленности F(θ)=FΣ(θ)-K·FΔ(θ) по угловой координате θ тем меньше, чем выше коэффициент усиления K видеоусилителя 13.
Экспериментальная зависимость угловой разрешающей способности θ0,5, исследованной РЛС, от величины коэффициента усиления K видеоусилителя 13, представленная на фиг.7, показывает возможность ее регулировки путем изменения величины K. Значения угловой разрешающей способности исследованной РЛС составляют:
- θ0,5=32' при K=0, что соответствует ширине ДНА по суммарному сигналу;
- θ0,5=22' при K=1;
- θ0,5=16' при K=2;
- θ0,5=8' при K=10;
Таким образом, положительный эффект по сравнению с прототипом заключается в том, что обеспечивается повышенная и регулируемая угловая разрешающая способность при одновременном подавлении боковых лепестков диаграммы направленности, причем радиолокационное устройство является устройством некогерентного типа, а следовательно оно значительно проще, легче и дешевле устройства, принятого за прототип. В прототипе РЛС является устройством когерентного типа со всеми вытекающими из этого сложностями, т.е. сложное, тяжелое и дорогое за счет наличия в его составе сложного передатчика, обеспечивающего высокую стабильность частотных и фазовых характеристик генерируемых СВЧ колебаний, сложного двухканального приемного устройства и двойного фазового детектора, обладающих высокостабильными и идентичными фазовыми характеристиками каналов суммарного и разностного сигналов.
Предлагаемое изобретение обеспечивает:
1. Существенное увеличение угловой разрешающей способности некогерентной моноимпульсной РЛС, что позволяет увеличить точность определения угловых координат в режиме обзора.
2. Компенсацию боковых лепестков ДНА некогерентной моноимпульсной РЛС.
3. Регулирование величины угловой разрешающей способности некогерентной РЛС.
4. Существенное улучшение характеристик обнаружения объектов и возможность решения дополнительных задач с помощью некогерентной РЛС с повышенной угловой разрешающей способностью.
5. Значительное упрощение аппаратуры радиолокационных комплексов в виду того, что предложенная некогерентная РЛС значительно проще когерентной РЛС, выполняющей те же задачи, т.к. существенно упрощаются основные блоки - передатчик, приемное устройство, синхронизатор. Кроме того, ввиду отсутствия в составе некогерентной РЛС двухканального фазового детектора, приемники суммарного и разностного каналов становятся идентичными, т.е. возможна их унификация.
6. Возможность решения задач, указанных в цели изобретения, как внекогерентных, так и в когерентных РЛС.
7. Дальнейшее развитие бортовых и наземных РЛС, т.к. в направлении по улучшению одного из основных параметров РЛС - угловой разрешающей способности (при неизменном физическом раскрыве антенны) существовал длительный застой (в течение 20-30 лет) ввиду того, что указанная область считалась не поддающейся дальнейшему усовершенствованию.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОПЕЛЕНГАТОР | 2004 |
|
RU2262714C1 |
| СПОСОБ ОБУЖЕНИЯ ПРИЕМНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ И МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2014 |
|
RU2599932C2 |
| МОНОИМПУЛЬСНАЯ ТРЕХКАНАЛЬНАЯ СУММАРНО-РАЗНОСТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2296347C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО | 2007 |
|
RU2358283C2 |
| МОНОИМПУЛЬСНАЯ СИСТЕМА СО СВЕРХРЕГЕНЕРАТИВНЫМ ОТВЕТЧИКОМ | 2007 |
|
RU2368916C2 |
| СПОСОБ ИМИТАЦИИ ДВУХЧАСТОТНЫХ РАДИОСИГНАЛОВ | 2012 |
|
RU2485541C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2016 |
|
RU2636058C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |

Изобретение относится к области радиолокации и предназначено для повышения угловой разрешающей способности радиолокационных станций (РЛС). Достигаемым техническим результатом является увеличение точности определения угловых координат целей некогерентной РЛС в режиме обзора при одновременном подавлении боковых лепестков диаграммы направленности антенны. Указанный результат достигается за счет того, что радиолокационное устройство содержит антенну, формирователь суммарного и разностного сигналов, переключатель "прием-передача", передатчик, два смесителя, гетеродин, два усилителя промежуточной частоты, два амплитудных детектора, два ограничителя, видеоусилитель, вычитатель, соединенные определенным образом между собой. 7 ил.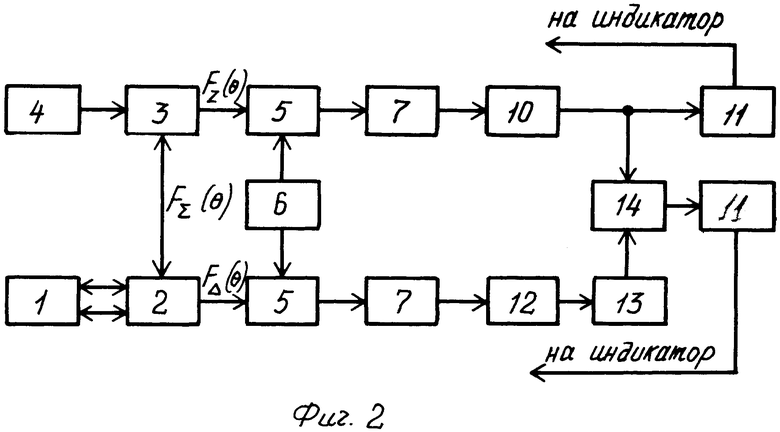
Радиолокационное устройство, содержащее антенну, соединенную входами-выходами с формирователем суммарного и разностного сигналов, выход которого подключен ко входу переключателя "прием-передача", к другому входу которого подключен выход передатчика, канал суммарного сигнала, включающий последовательно соединенные смеситель, вход которого подключен к выходу переключателя "прием-передача", усилитель промежуточной частоты, амплитудный детектор и первый ограничитель, выход которого является первым выходом устройства, а также канал разностного сигнала, включающий последовательно соединенные смеситель, вход которого подключен ко второму выходу формирователя суммарного и разностного сигналов и усилитель промежуточной частоты, второй ограничитель, выход которого является вторым выходом устройства, гетеродин, выходы которого подключены ко вторым входам смесителей каналов суммарного и разностного сигнала, отличающееся тем, что, с целью повышения точности определения угловых координат целей, введены вычитатель, а в канал разностного сигнала последовательно соединенные амплитудный детектор, вход которого подключен к выходу соответствующего усилителя промежуточной частоты, и видеоусилитель, выход которого, а также выход амплитудного детектора канала суммарного сигнала, подключены ко входам вычитателя, выход которого подключен ко входу второго ограничителя.
| Пат | |||
| США №3212089, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |

