Изобретение относится к области радиолокации и предназначено для использования на летательных аппаратах.
Известен способ и радиолокационные станции, использующие обужение диаграммы направленности антенны:
В первой книге рассмотрен способ обужения приемной диаграммы направленности путем вычитания принятых сигналов разностной диаграммой направленности из сигналов принятых суммарной амплитудной приемной диаграммой направленности при работе радиолокатора по воздушной цели.
Книга 1. Д.Р. Родс «Введение в моноимпульсную радиолокацию», стр. 88. Издательство «Советское радио». Москва, 1960 г.
Во второй книге рассмотрено применение обужения (обострения) приемной диаграммы направленности антенны для получения точной оценки расстояния до отражающих участков земли, расположенных на равносигнальном направлении в режиме маловысотного полета при обнаружении препятствий.
Как и в первой книге, приведен амплитудно-разностный метод обужения с применением суммарной и разностной диаграмм направленности антенны для определения более точной оценки расстояния до отражающего участка земли в равносигнальном направлении.
Книга 2. П.И. Дудник «Авиационные радиолокационные устройства», стр. 488. Издание ВВИА им. Н.Е. Жуковского, 1976 г.
В журнале по существу произведен анализ способа обужения, приведенного в книгах 1 и 2, при применении аналоговых антенн в режиме обужения диаграмм направленности и предложен приведенный способ обужения диаграмм направленности применительно к цифровой антенной решетке.
Журнал «Успехи современной радиоэлектроники» №8, стр. 94, Москва, 2013 г.
Рассмотрение этого способа обужения приемной диаграммы направленности антенны показывает, что он имеет ограничения.
Этот способ обужения приемной диаграммы эффективен в случае, если цель или участок отражения от земли, находящийся в стробе дальности, принимается только одним из лучей разностной диаграммы.
Если при работе по воздушной (одиночной) цели (для выше приведенного построения) обужение диаграммы приемной антенны может обеспечиваться как в азимутальной, так и в угломестной (наклонной) плоскости, то при обнаружении препятствий в режиме маловысотного полета, режим обужения приемной диаграммы может применяться только в угломестной (наклонной) плоскости.
Приведенный способ становится неэффективным, когда при работе по воздушным целям в один элемент дальности попадает несколько целей, принятых двумя лучами разностной диаграммы, или когда в режиме маловысотного полета в один элемент дальности попадают отраженные сигналы от препятствий (препятствие с крутым рельефом в наклонной плоскости) и также принятые двумя лучами разностной диаграммы.
Наличие отражений от целей или участков препятствий, приходящих в один элемент дальности, принятых двумя лучами разностной диаграммы, приводит к неоднозначному обужению, а в случае равенства амплитуд сигналов, принятых двумя лучами, эти сигналы в разностном канале взаимно уничтожаются, что исключает обужение приемной диаграммы.
Вышеприведенное показывает, что использование разностной диаграммы направленности для обужения приемной диаграммы в моноимпульсной РЛС имеет ограничения, не позволяющие обеспечивать обужение диаграммы направленности в азимутальной плоскости при работе по наземным или морским целям и объектам, обнаруживаемых на фоне подстилающей поверхности.
Однако остаются задачи обнаружения наземных и морских малоразмерных неподвижных целей, требующих обнаружения в передней полусфере полета (в том числе в направлении вектора скорости) носителя, которые могут решаться только при применении узкой диаграммы в азимутальной плоскости.
Как известно, дальность обнаружения наземных неподвижных целей на фоне отражений от подстилающей поверхности определяется только отношением « »,
»,
где: σф=L∗Δr∗σo,
σф - эффективная отражающая поверхность фона;
σц - эффективная отражающая поверхность цели;
Δr - линейный размер площадки отражений по дальности;
L - линейный размер площадки отражений по азимуту;
σo - удельный коэффициент отражения.
На требуемой дальности обнаружения «D» линейный размер площадки принимаемых отражений фона определяется угловым размером луча приемной диаграммы «Θл»: L=D∗Θл.
При заданных габаритных размерах антенны, длине волны «λ» и разрешаемом элементе по дальности «Δr» основным режимом повышения дальности обнаружения неподвижных целей на фоне подстилающей поверхности является режим обужения луча «Θл».
Реализация обужения луча в режиме синтезирования апертуры антенны также имеет ограничения. Этот режим требует наличия скорости носителя (движение фазового центра антенны), что исключает его применение на зависшем в воздухе вертолете.
Кроме того, этот режим имеет очень плохие характеристики обужения в переднем секторе в направлении вектора скорости полета.
Выше было приведено, что использование лучей разностной диаграммы для обужения приемной диаграммы приводит к ограничениям. Для обужения луча в азимутальной плоскости при работе на фоне отражений их применение неэффективно.
Для режима обужения луча приемной диаграммы направленности должен быть изменен подход к формированию диаграммы направленности для лучей обужения.
Если в моноимпульсном радиолокаторе для сопровождения цели максимумы лучей, формирующие разностную диаграмму, смещены на углы относительно равносигнального направления, при которых обеспечивается пересечение их амплитудных характеристик по уровню ~0,5 Pmax, то для обужения приемной диаграммы, для исключения подавления обнаруживаемого сигнала приемной диаграммой при обужении, максимумы лучей для формирования диаграммы обужения должны быть смещены на угол относительно оси диаграммы направленности приемной антенны, обеспечивающий пересечение лучей по уровню -15÷-20 дБ Pmax.
Если сигналы, принятые лучами диаграммы направленности антенны в моноимпульсной РЛС для формирования разностной диаграммы вычитались, то в режиме обужения эти сигналы, принятые лучами, должны суммироваться с последующим их вычитанием из сигналов приемной диаграммы, обеспечивая ее обужение.
При таком построении лучей диаграммы направленности путем вычитания приходящих сигналов на выходах каналов формируется обуженная приемная диаграмма направленности и подавляет отраженные сигналы, принимаемые краями основной приемной диаграммы направленности РЛС, обеспечивая обужение луча приемной диаграммы, в том числе и в азимутальной плоскости (см. формула [1]).

где:
|Uпр| - напряжение на выходе канала приемной антенны;
k - коэффициент усиления сигнала канала антенны обужения;
|Uоб| - напряжение на выходе канала антенны обужения;
|Uобпр| - напряжение на выходе обуженной приемной диаграммы.
Рассмотрим недостатки используемого (см. книга 1 и книга 2) и предлагаемого способа обужения приемной диаграммы направленности антенны РЛС, используя в качестве прототипа материалы статьи, приведенные в журнале «Успехи современной радиоэлектроники» №8 за 2013 г.: «Метод обужения диаграммы направленности цифровой антенной решетки», стр 94. В статье приведен анализ реализованного способа обужения, изложенного в книге 1 и книге 2 (см. стр. 1).
В статье рассмотрен суммарно-разностный метод обужения антенной решетки, состоящей из подрешеток.
Суммарная диаграмма Sф(Θ) формируется как сумма модулей ДН левой  и правой
и правой  подрешетки АР, а разностная ДН - как модуль их разности:
подрешетки АР, а разностная ДН - как модуль их разности:

 .
.
Результирующая обуженная диаграмма направленности получается как разность суммарной Sф(Θ) и разностной Dф(Θ) диаграмм направленности:
|Rф(Θ)|=|Sф(Θ)|-|Dф(Θ)|
Ограничением этого способа, по мнению авторов статьи, является возможность оперировать с ДН, сформированными только с подрешетками - левой и правой для азимутальной плоскости или верхней и нижней для угломерной плоскости.
Поэтому авторы предлагают реализацию режима проводить с помощью цифровой антенной решетки (ЦАР), так как в ЦАР возможно формирование независимо управляемых диаграмм, что позволяет получить результирующую диаграмму за счет линейной комбинации нескольких диаграмм, максимумы которых разнесены на величину «Θл». Такой способ формирования ДН позволяет наиболее просто реализовать выше приведенный амплитудный суммарно-разностный метод.
В результате анализа работы суммарно-разностного метода с помощью ЦАР отмечается, что применение ЦАР позволяет получить на 35% более узкий Главный максимум результирующей ДН и более низкий уровень боковых лепестков по сравнению с этим способом обужения с применением антенны с решеткой и подрешетками.
Рассмотрение предложенного авторами в статье метода (способа) обужения луча приемной диаграммы антенны с помощью цифровой антенной решетки ЦАР показывает:
1. Авторы исследовали применяемый способ обужения приемной диаграммы направленности с помощью амплитудного суммарно-разностного метода (см. книга 1 и книга 2), где из сигналов принятой суммарной диаграммы вычитаются сигналы разности двух лучей диаграммы, максимумы которых разнесены на угол «Θл» относительно оси приемной суммарной диаграммы.
2. Авторы, для улучшения характеристик обужения приемной диаграммы, предлагают реализовать этот метод с помощью цифровой антенной решетки (ЦАР).
3. Как следует из материалов статьи, авторы не устраняют выше приведенные недостатки, присущие суммарно-разностному методу, а только несколько повышают характеристики обужения при работе по одной цели.
Применение этого метода ухудшает эффективность или приводит к неработоспособности режим обужения, когда отраженные сигналы от нескольких целей или от подстилающей поверхности поступают одновременно в два луча разностной диаграммы направленности и находятся на одной дальности.
Задача предлагаемого способа заключается в получении эффективности и полной работоспособности режима обужения приемной диаграммы направленности РЛС независимо от тактической и радиолокационной обстановки. При этом обужение диаграммы может производиться как в азимутальной, так и в угломестной плоскостях.
Решение достигается тем, что в антенне (с механическим управлением или электронной фазированной цифровой антенной решетке (ЦФАР), с целью обужения приемной диаграммы, формируются независимые диаграммы:
1. Приемо-передающая диаграмма направленности определяемая всем раскрывом антенны.
2. Диаграмма обужения, являющаяся суммарной диаграммой двух лучей в азимутальной (или наклонной) плоскости, максимумы которых смещены на угол «Θсм» относительно оси приемо-передающей диаграммы.
При этом угол смещения «Θсм» оси «max» направления луча (диаграммы направленности) каждой пары относительно оси «max» приемо-передающей диаграммы, выбирается таким образом, чтобы уровень усиления лучей в точке их пересечения в направлении «max» приемо-передающей диаграммы не приводил к недопустимым энергетическим потерям обнаруживаемого сигнала при обужении приемной диаграммы.
Как следует из вышесказанного, уровень усиления в точке пересечения диаграмм пары лучей в направлении «max» приемо-передающей диаграммы (G=-15÷-20 дБ) отличается от принятого в антенне, применяемой для обужения при использовании суммарно-разностного метода прототипа (G=-3 дБ).
Следовательно, предлагаемый способ обужения существенно отличается от прототипа, В соответствии с предложенным алгоритмом решения задачи обужения называем способ обужения амплитудным суммарно-суммарно-разностным (АССР).
Амплитудный суммарно-суммарно-разностной способ
Для формирования диаграммы луча приемо-передающей антенны применительно к цифровой антенной решетке (ЦАР) используются все элементы антенной решетки, при этом, суммарная диаграмма формируется из суммы модулей левой Fл(Θ) и правой Fпр(Θ) частей диаграммы направленности (ДН ЦАР).
|FΣ(Θ)|=|Fл(Θ)|+|Fпр(Θ)|,
где
 ;
;
 ,
,
где
An - амплитуда сигнала на выходе «n-го» элемента антенной решетки;
d - расстояние между антенными элементами;
k - волновое число 2π/λ;
Θсм1 - угол смещения максимума луча левой и правой части диаграммы направленности относительно «max» луча суммарной диаграммы «FΣ». При этом 2 Θсм1 равны ширине луча суммарной ДН по уровню -3 дБ∗P.
Формирование специальной диаграммы (диаграммы для обужения приемной диаграммы) производится аналогично за исключением того, что углы смещения лучей «Θсм2», принимаются исходя из требований к допустимому уровню усиления диаграмм в точке их пересечения на оси «max» приемной диаграммы направленности, не приводящему к энергетическим потерям обнаруживаемого сигнала при обужении. При этом угол смещения «Θсм2» должен быть больше угла смещения «Θсм1» (Θсм2>Θсм1).
Диаграмма обужения FΣо(Θ) также будет являться суммой модулей сигналов левой и правой части антенной решетки.
Диаграмма обужения будет являться суммой:
FΣо(Θ)=|Fл(Θ)|+|Fпр(Θ)|, при Θсм2>Θсм1.
Обуженная приемная диаграмма FΣо(Θ) является результатом разности суммы модулей сигналов антенных элементов приемной диаграммы FΣ(Θ) и суммы модулей сигналов антенных элементов диаграммы обужения FΣоб(Θ).
|FΣоб(Θ)|=|FΣ(Θ)|-|FΣо(Θ)|.
Для дополнительного обужения приемной диаграммы применяется специальная регулировка коэффициента усиления сигналов канала диаграммы обужения.
Тогда формула приобретает вид:
|FΣоб(Θ)|=|FΣ(Θ)|-k∗|FΣo(Θ)|,
где
k - коэффициент усиления выходных сигналов канала обужения.
Приведенный алгоритм обужения в зависимости от режима работы РЛС может быть реализован как в азимутальной, так и в угломестной плоскости.
Характеристики обужения приемной диаграммы направленности
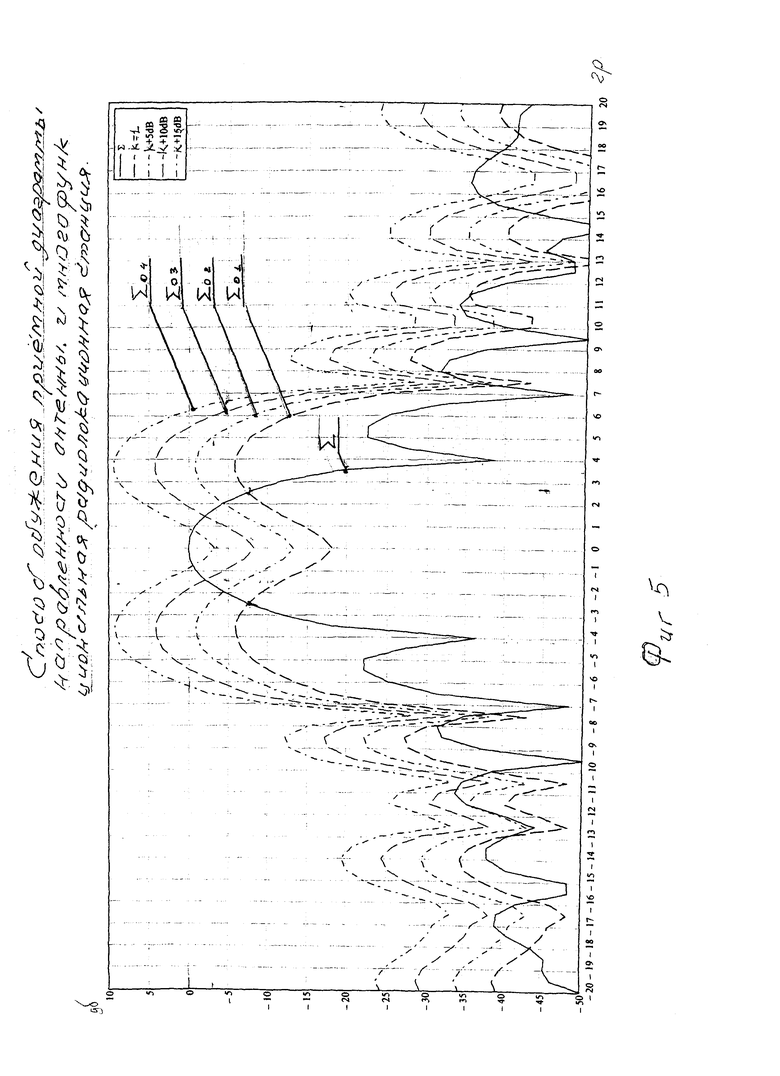
На фиг. 5 приведены:
- приемопередающая диаграмма направленности антенны Σ (линия диаграммы направленности без разрывов -1).
Ширина диаграммы направленности по уровню -3 дБ-Θ=3,5°;
- диаграмма направленности обужения 2, 3, 4, 5 (пунктирная линия).
Диаграмма направленности обужения является суммой сигналов Σо, принятых диаграммами направленности двух лучей антенны, смещенных относительно друг друга на угол 8° и имеющие различные коэффициенты усиления «k».
Коэффициенты усиления сигналов для приведенных диаграмм составляют.
- диаграмма Σ01-k1=1;
- диаграмма Σ02-k2=5 дБ;
- диаграмма Σ03-k3=10 дБ;
- диаграмма Σ04-k4=15 дБ.
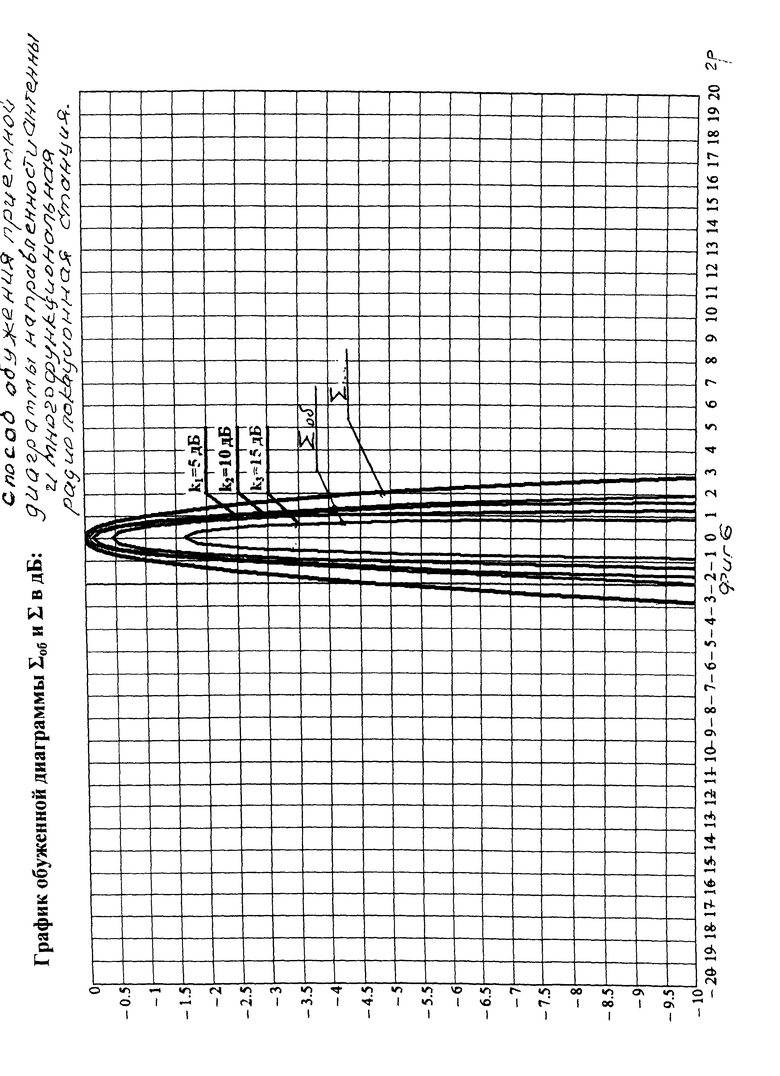
На графиках фиг. 6 приведены диаграммы обуженных приемных диаграмм, полученных по формуле:
|Σоб|=|Σ|-k|Σо|.
Из графика для обуженной диаграммы Σоб находим, что ширина диаграммы для k=15 дБ уменьшается более чем в 3 раза.
2. Многофункциональная радиолокационная станция для летательных аппаратов
Изобретение относится к области радиолокации и может быть использовано на самолетах и вертолетах.
Известны многофункциональные бортовые радиолокационные станции (БРЛС), которые устанавливают на магистральных самолетах всех классов для обнаружения грозовых фронтов и кучевой облачности, обзора земной поверхности в передней полусфере, для обнаружения наземных сооружений и определения береговой черты крупных водоемов.
Аналогами таких РЛС могут быть отечественные БРЛС «Градиент» и «Контур», устанавливаемые на самолеты типа «Як» и «Ту».
В качестве прототипа рассматривается многофункциональная радиолокационная станция для летательных аппаратов, приведенная в патенте на изобретение №2319173 от 10.03.2008 г.
Многофункциональная БРЛС предназначена для работы в режимах обнаружения грозовых фронтов, обзора земной поверхности, определения береговой черты, обнаружения и определения высоты наземных препятствий.
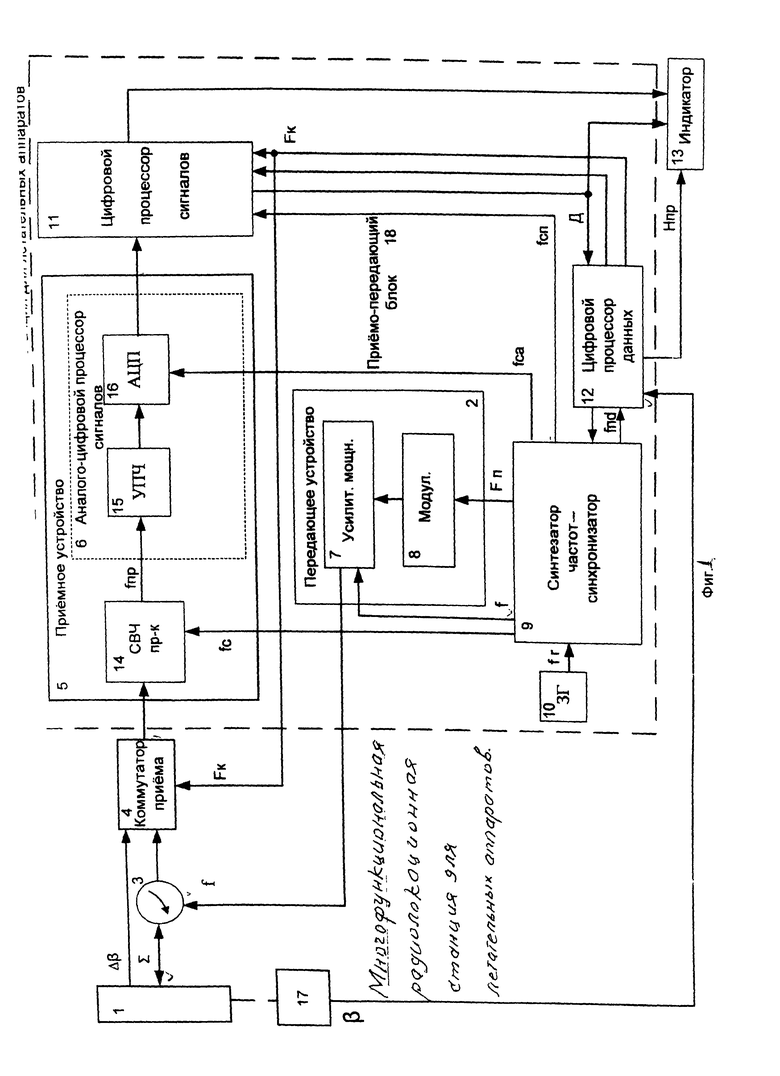
На фиг. 1 представлена блок схема многофункциональной радиолокационной станции прототипа, работающей в режиме обужения приемной диаграммы направленности.
На фиг. 2 представлена развернутая структурная схема цифрового процессора сигналов 11 прототипа.
1 - щелевая антенна;
2 - передающее устройство;
3 - циркулятор;
4 - коммутатор приема;
5 - приемное устройство;
6 - аналого-цифровой процессор;
7 - усилитель мощности;
8 - модулятор;
9 - синтезатор частот-синхронизатор;
10 - задающий генератор;
11 - цифровой процессор сигналов;
12 - цифровой процессор данных;
13 - индикатор;
14 - СВЧ-приемник;
15 - усилитель промежуточной частоты;
16 - АЦП;
17 - датчик угла;
18 - приемно-передающий блок, включающий в себя устройства 5, 6, 7, 8, 9, 10, 11, 12, 14, 15 и 16;
20 - устройство обужения;
21 - коммутатор;
22 - первое устройство памяти;
23 - второе устройство памяти;
24 - устройство разности;
25 - первое устройство умножения
26 - второе устройство умножения.
Многофункциональная БРЛС с приведенным составом аппаратуры обеспечивает решение перечисленных задач.
Ниже дается описание взаимодействия и связей блоков и устройств, работающих при решении задачи обнаружения и определения высоты наземных препятствий при обужении приемной диаграммы направленности антенны.
В режиме сканирования антенны в угломестной плоскости усилитель мощности 7 передающего устройства 2 усиливает высокочастотные импульсы «f», поступающие из синтезатора частот-синхронизатора 9, и через циркулятор 3 передает их в щелевую антенну 1. Щелевой антенной эти импульсы излучаются в пространство и распространяются в направлении, определяемом диаграммой направленности щелевой антенны. Стабильность несущей частоты «f» определяется задающим генератором 10. На выход модулятора 8 из синтезатора частот-синхронизатора 9 поступают импульсы запуска (Fп), которые формируются путем деления частоты сигнала «fг» задающего генератора 10. Длительность импульса также формируется в синтезаторе частот-синхронизаторе 9 путем использования периода сигнала «fг».
Высокочастотный сигнал несущей частоты f также формируется синтезатором частот-синхронизатором. От задающего генератора 10 сигнал с частотой fг поступает в синтезатор частот-синхронизатор 9, умножается до частоты (f) и используется в качестве несущей частоты радиолокационного сигнала, излучаемого щелевой антенной 1.
Модулятор 8 осуществляет модуляцию высокочастотного сигнала «f» сформированными импульсами, поступающими в усилитель мощности 7 передающего устройства 2, имеющими заданную длительность (τ), а также период повторения (Тп), определяемый однозначной дальностью. С целью сокращения массы и габаритов аппаратуры применяется один приемный канал. При этом прием одновременно поступающих отраженных сигналов, принятых суммарной и разностной диаграммами, разделяется во времени коммутатором приема 4 таким образом, чтобы за время приема обуженным лучом суммарной диаграммы энергия сигнала, определяемая временем накопления, была достаточна для обнаружения препятствий с заданной вероятностью. Это время определяется частотой коммутации Fk коммутатора, задаваемой цифровым процессором данных 12.
В процессе сканирования щелевой антенны 1 отраженные сигналы от объектов и поверхности принимаются щелевой антенной 1, в которой сигналы, принятые суммарной диаграммой через циркулятор 3 и коммутатор 4 поступают в приемное устройство 5. В СВЧ-приемнике 14 эти сигналы в смесителе приемника смешиваются с сигналом синтезатора частот-синхронизатором fc, в результате чего образуются сигналы промежуточной частоты fпр. Сигналы промежуточной частоты fпр поступают в аналого-цифровой процессор 6, где в усилителе промежуточной частоты УПЧ 15 усиливаются и поступают в аналого-цифровой преобразователь АЦП 16, управляемый с помощью синхросигнала fca, где преобразуются в цифровую форму. С выхода АЦП 16 сигналы поступают в устройство обужения 20 (см. фиг 2) цифрового процессора сигналов 11, синхронизуемого сигналом «fсп».
Далее сигналы суммарной диаграммы в устройстве обужения 20 поступают на коммутатор 21. С выхода коммутатора 21 сигналы поступают на первое устройство памяти UΣ 22.
Поступающие отраженные сигналы и принятые разностной диаграммой щелевой антенны 1 непосредственно из щелевой антенны 1 поступают на коммутатор приема 4, и далее сигнал разностной диаграммы проходит аналогичную суммарному сигналу обработку. При такой обработке, коммутаторы 4 и 21 (с помощью сигнала Fk цифрового процессора 12) синхронно переключаются на последовательный прием, обработку и накопление сигналов в устройствах памяти 22 и 23 суммарной и разностной диаграммы направленности щелевой антенны 1.
Обужение суммарной диаграммы на прием производится в цифровом процессоре сигналов 11 в устройстве обужения 20 с помощью устройства разности 24, а также первого 25 и второго 26 устройств умножения, путем вычитания накопленных в каждом элементе дальности сигналов разностной диаграммы UΔ из сигналов в одноименных элементах дальности суммарной диаграммы UΣ. Перед вычитанием сигналов, сигналы разностной диаграммы UΔ поступают из второго устройства памяти 23 в первое устройство умножения 25, где умножаются на коэффициент усиления сигналов разностной диаграммы «K». Затем умноженный разностный сигнал KUΔ поступает в устройство разности 24, куда из первого устройства памяти 22 поступают сигналы суммарной диаграммы UΣ в одноименных элементах дальности.
В устройстве разности 24 производится вычитание усиленных сигналов разностной диаграммы из одноименных по дальности сигналов суммарной диаграммы |UΣ|-K|UΔ|=UΣобуж. Из устройства разности 24 сигналы поступают во второе устройство умножения 26, куда также поступают сигналы суммарной диаграммы из первого устройства памяти 22. Во втором устройстве умножения 26 производится умножение сигналов обуженной диаграммы на сигналы первичной суммарной диаграммы UΣобуж∗UΣ.
В результате умножения производится дополнительное обужение диаграммы, и уменьшаются боковые лепестки первичной обуженной диаграммы.
Сигналы из второго устройства умножения поступают в индикатор 13 в моменты прихода сигнала, отраженного от наземных препятствий, и отображающаяся в нем в координатах дальность - высота. Для этого в цифровом процессоре данных 12 по информации о дальности «Д», поступающей из цифрового процессора сигналов 11, и углу места «β» щелевой антенны 1, поступающей из датчика угла 17, определяется высота препятствия Нпр относительно опорной плоскости.
Нпр=Но-Д∗β,
где:
Но - высота безопасного полета относительно опорной плоскости (плоскости безопасности);
Д - дальность до препятствия;
β - угол места антенны относительно горизонтальной плоскости проходящей через ось носителя.
Измеренное значение высоты препятствий Нпр также поступает в индикатор 13.
Для отображения РЛ информации значение дальности «Д» в индикатор 13 поступает из цифрового процессора сигналов 11.
Недостатком приведенного прототипа многофункциональной радиолокационной станции является ограничение применения амплитудно суммарно-разностного способа для обужения приемной диаграммы в различных тактических условиях применения РЛС.
Это связано с применением разностной диаграммы направленности для обужения приемной диаграммы при определении высоты препятствий в режиме маловысотного полета, когда в два луча разностной диаграммы на одной дальности при крутом рельефе местности приходят отраженные сигналы, которые взаимно уничтожаются. Этот недостаток наиболее ярко проявляется при необходимости обужения приемной диаграммы при обнаружении наземных целей на фоне подстилающей поверхности, когда обужение диаграммы должно проводиться в азимутальной плоскости.
Получение необходимой вероятности обнаружения малоразмерной цели на требуемой дальности в этом режиме обеспечивается путем получения необходимого соотношения сигналов отражений от цели и подстилающей поверхности за счет обужения приемной диаграммы.
При заданной длине волны излучения, апертуре антенны и разрешающей способности по дальности «Δr» дальность определяется соотношением:
 ,
,
где
N - требуемое соотношение для получения дальности с заданной вероятностью;
σц - эффективная площадь отражения от цели;
σпов - эффективная отражающая площадь подстилающей поверхности;
Ro - дальность до цели;
Δr - линейный размер площади отраженной дальности;
Θ - угловой размер площади отражений по азимуту;
σо - удельный коэффициент отражения от поверхности.
Из формулы следует, что эффективная площадь отражения в большой мере определяется угловым размером «Θ» диаграммы направленности антенны.
При заданной вероятности обнаружения цели, дальность обнаружения «Ro» в первой степени зависит от углового размера диаграммы направленности антенны «Θ».
Поэтому обужение диаграммы направленности антенны является главным фактором повышения характеристик обнаружения наземных и надводных неподвижных целей на фоне отражений от подстилающей поверхности.
Задачей изобретения является разработка средств многофункциональной БРЛС, обеспечивающих дополнительную функцию - обнаружение малоразмерных неподвижных наземных и надводных целей на фоне отражений от подстилающей поверхности, а также устранение ограничений применения обужения для измерения высоты препятствий с крутым рельефом в вертикальной плоскости.
В предлагаемой многофункциональной БРЛС эти задачи решаются тем, что в БРЛС, состоящей из передатчика, приемника, циркулятора, синтезатора частот-синхронизатора, процессора сигналов, процессора данных, задающего генератора и индикатора вводится цифровая антенная решетка и блок управления лучом (БУЛ), с помощью которого кроме приемо-передающей диаграммы направленности известными методами формируется специальная диаграмма для обужения приемной диаграммы направленности.
При этом в зависимости от режима работы БРЛС, формирование специальной диаграммы производится в азимутальной или наклонной плоскости.
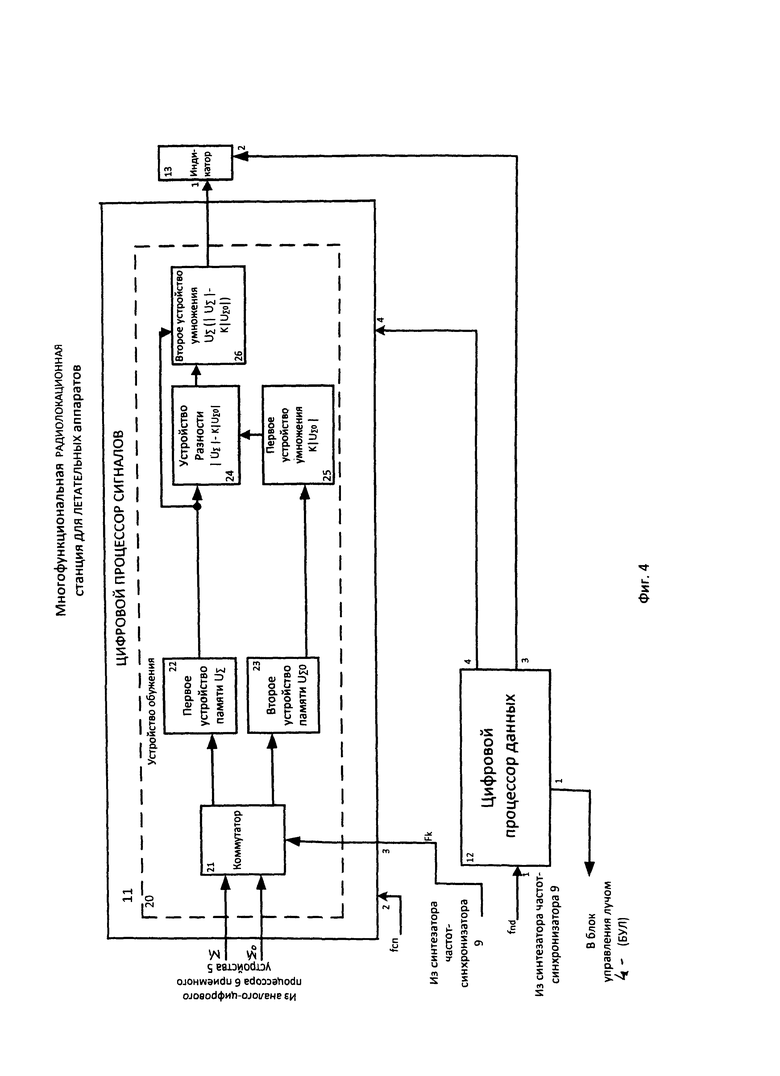
Для реализации задачи обужения приемной диаграммы с помощью специальной диаграммы обужения в цифровой процессор сигналов вводится устройство обужения приемной диаграммы. (см. фиг. 4)
В отличие от прототипа, устройство обужения работает по алгоритмам разработанного нового способа обужения (см. раздел 1). Вместо амплитудного суммарно-разностного способа обужения (АСР), применяемого в прототипе, в предлагаемой многофункциональной БРЛС реализуется новый способ обужения, амплитудный суммарно-суммарно-разностный способ обужения (АССР).
Обужение приемной диаграммы направленности выполняется в цифровом процессоре путем вычитания одноименных по дальности сигналов, принятых приемной диаграммой, сигналов, принятых специальной диаграммой обужения. Сигналы диаграммы обужения вычитаются с определенным весом, который определяет величину обужения приемной диаграммы.
В заявляемой многофункциональной БРЛС решение задачи обнаружения неподвижных малоразмерных наземных и надводных целей на фоне отражений от подстилающей поверхности реализуется в одном из режимов обзора земной и водной поверхностей.
При работе БРЛС в обзоре во время сканирования луча антенны, формирование и работа диаграмм направленности производится через такт (период повторения «Tn»).
В первом периоде повторения излучаемого импульса передача и прием сигналов производится через приемо-передающую диаграмму направленности антенны. Во втором периоде повторения, излучение сигнала идет через приемо-передающую диаграмму, а прием сигналов идет через специальную диаграмму обужения. Далее процесс излучения и приема повторяются.
На выходе антенны сигналы двух каналов поступают на СВЧ приемник. После первичной обработки и преобразования сигналов на видеочастоту, сигналы каждого канала поступают в процессор. В процессоре они коммутируются, и сигналы каждого канала накапливаются в памяти процессора сигналов по дальности.
При вторичной обработке сигналов, накопленных в памяти устройства обужения, из одноименных сигналов UΣ по дальности приемного канала, (приемной диаграммы антенны) вычитаются сигналы, принимаемые диаграммой обужения канала UΣo (диаграммы обужения антенны) по формуле:
|UΣ|-K|UΣo|=|UΣоб|,
где:
K - коэффициент усиления сигналов канала обужения.
Величина обуженного угла Θα приемной диаграммы при таком обужении определяется коэффициентом усиления «K» сигналов, принятых диаграммой обужения.
Значение коэффициента «K» принимается компромиссным решением между величиной обуженного угла и допустимыми потерями мощности принимаемого сигнала.
Дополнительное обужение суммарной диаграммы и снижение уровня боковых лепестков диаграммы направленности обеспечивается путем умножения сигналов первичной приемо-передающей диаграммы на сигналы обуженной диаграммы.
|UΣ|∗|UΣоб|=|U∗ Σоб|
В результате таких операций при сканировании луча антенны по углу азимута выделяются сигналы отражений от целей в координатах дальность - азимут и выдаются на индикатор.
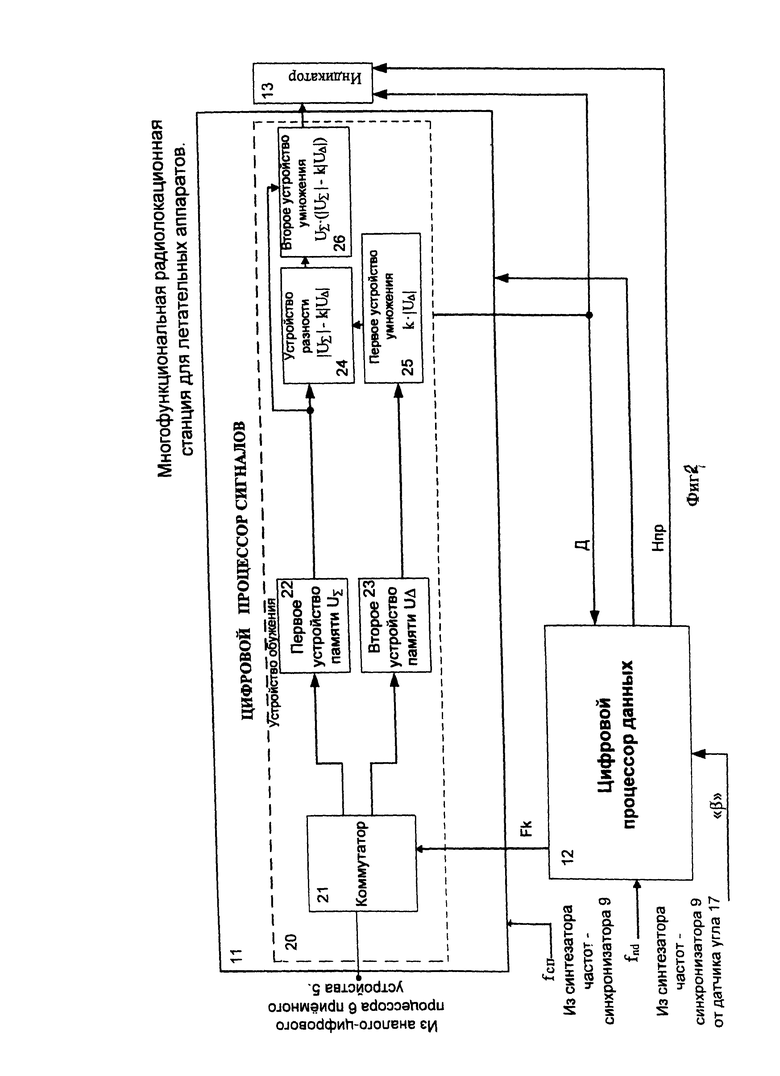
На фиг. 3 представлена блок-схема предлагаемой многофункциональной радиолокационной станции.
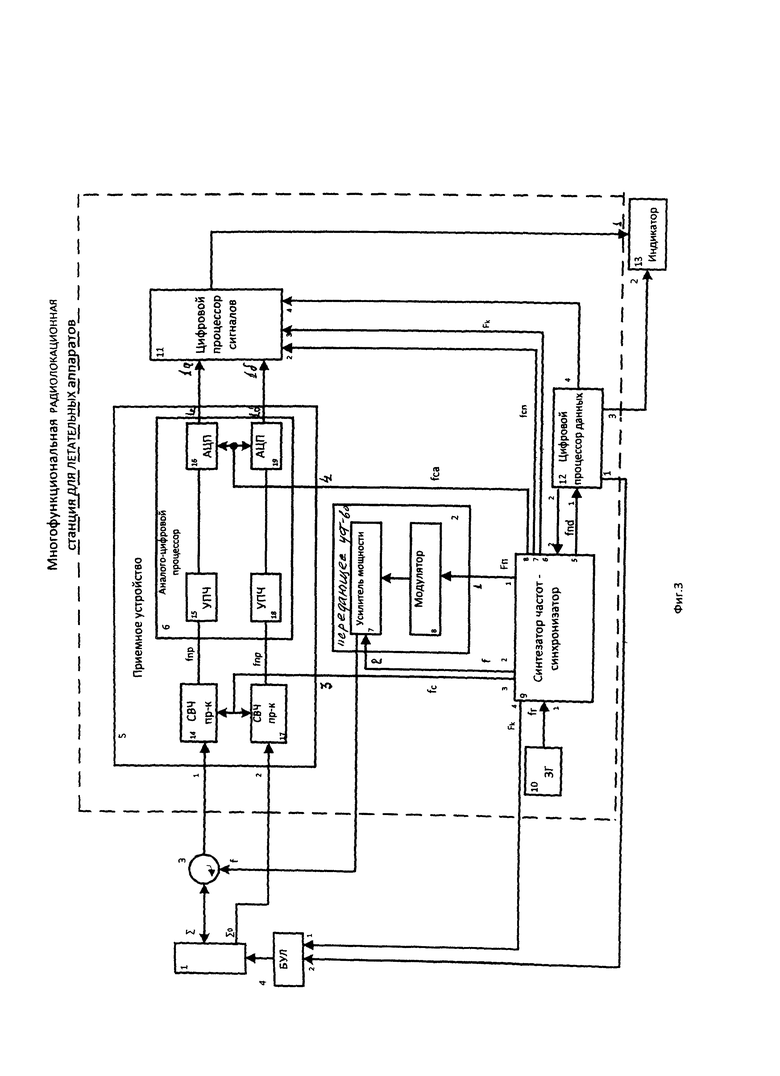
На фиг. 4 представлена развернутая структурная схема цифрового процессора сигналов 11.
В предлагаемую многофункциональную радиолокационную станцию входят:
1 - антенна;
2 - передающее устройство;
3 - циркулятор;
4 - блок управления лучом (БУЛ);
5 - приемное устройство;
6 - аналого-цифровой процессор;
7 - усилитель мощности;
8 - модулятор;
9 - синтезатор частот-синхронизатор;
10 - задающий генератор;
11 - цифровой процессор сигналов;
12 - цифровой процессор данных;
13 - индикатор;
14 - СВЧ-приемник;
15 - усилитель промежуточной частоты (УПЧ);
16 - АЦП;
17 - СВЧ-приемник;
18 - усилитель промежуточной частоты (УПЧ);
19 - АЦП;
20 - устройство обужения;
21 - коммутатор;
22 - первое устройство памяти;
23 - второе устройство памяти;
24 - устройство разности;
25 - первое устройство умножения;
26 - второе устройство умножения.
Предлагаемая многофункциональная БРЛС с приведенным составом аппаратуры обеспечивает решение перечисленных задач прототипа, а также решает дополнительную задачу - обнаружение малоразмерной неподвижной наземной и надводной цели на фоне отражений от подстилающей поверхности.
Поставленная задача решается тем, что используется цифровая фазированная антенная решетка, введен блок управления лучом 4, в приемное устройство 5 введен второй приемный канал, состоящий из СВЧ приемника 17, усилителя промежуточной частоты УПЧ 18 и аналого-цифрового процессора 19.
Ниже дается описание взаимодействия и связей блоков и устройств, работающих при решении задачи обнаружения наземных и надводных целей.
Для передачи излучающих импульсов в антенну вход выход антенны 1 через циркулятор 3 соединен с выходом усилителя мощности 7 передающего устройства 2.
Для приема сигналов приемной диаграммы направленности антенны 1 вход-выход антенны 1 через циркулятор 3 соединен с первым входом приемного устройства 5 на вход СВЧ приемника 14.
Для приема сигналов диаграммы направленности для обужения приемной диаграммы второй выход антенны 1 соединен со вторым входом приемного устройства 5 на вход СВЧ приемника 17 второго приемного канала.
Для формирования запускающих и синхронизирующих сигналов выход задающего генератора 10 соединен с первым входом синтезатора - частот синхронизатора 9.
Для запуска передающего устройства первый выход синтезатора частот-синхронизатора 9 по сигналу запуска Fn соединен с первым входом передающего устройства 2 на вход модулятора 8, а для формирования излучаемого СВЧ сигнала f, второй выход синтезатора частот-синхронизатора 9 соединен со вторым входом передающего устройства 2 на вход усилителя мощности 7.
Для формирования промежуточной частоты принимаемого сигнала fпр третий выход синтезатора частот-синхронизатора 9 по сигналу гетеродинной частоты fc соединен с третьим входом приемного устройства на два входа СВЧ приемников 14 и 17.
Для формирования сигналов дискретизации аналого-цифрового преобразователя (АЦП) 6 восьмой выход синтезатора частот-синхронизатора 9 по сигналу частоты fca соединен с четвертым входом приемного устройства 5 на два входа АЦП 16 и АЦП 19, а для синхронизации работы цифрового процессора сигналов 11 седьмой выход синтезатора 9 по сигналу тактовой частоты fcn соединен со вторым входом цифрового процессора сигналов 11.
Для синхронизации работы цифрового процессора данных 12, пятый выход синтезатора частот-синхронизатора 9, по сигналу fnd соединен с первым входом цифрового процессора данных 12.
Для управления режимами синтезатора частот-синхронизатора 9 второй выход цифрового процессора данных 12 соединен со вторым входом синтезатора частот-синхронизатора 9.
Для коммутации сигналов в цифровом процессоре сигналов 11, в режиме обужения приемной диаграммы направленности, шестой выход синтезатора частот-синхронизатора 9 по сигналу «Fk» соединен с третьим входом цифрового процессора сигналов 11.
Для синхронизации временной последовательности формирования диаграмм направленности антенны 1 четвертый выход синтезатора частот-синхронизатора 9 соединен с первым входом блока управления лучом 4.
Для управления параметрами и режимами антенны 1 первый выход цифрового процессора данных 12 соединен со вторым входом блока управления лучом 4.
Для коммутации диаграмм направленности цифровой антенной решетки четвертый выход синтезатора частот-синхронизатора 9 соединен с первым входом блока управления лучом 4.
Для управления режимами работы и выдачи исходных параметров четвертый выход цифрового процессора данных 12 соединен с четвертым входом цифрового процессора сигналов 11 (по специальному интерфейсу в соответствии с ГОСТ).
Для приема и обработки радиолокационной информации входы 1а и 1б процессора сигналов 11, по специальному интерфейсу соединены с выходами 1а и 1б приемного устройства 5 с выходов АЦП 16 и АЦП 19, а для отображения РЛ информации выход цифрового процессора сигналов 11 соединен с первым входом индикатора 13.
Для обужения приемной диаграммы направленности в цифровом процессоре сигналов 11 устройство обужения состоит из коммутатора 21, первого устройства памяти 22, второго устройства памяти 23, устройства разности 24, первого устройства умножения 25 и второго устройства умножения 26. Накопление сигналов в первом 22 или втором 23 устройствах памяти производится через коммутатор 21, на вход которого подаются сигналы из аналого-цифрового процессора сигналов 6 приемного устройства 5.
При этом выходы приемного устройства 5 соединены со входами коммутатора 21.
Для коммутации принятых сигналов приемным устройством 5 коммутатором 21 в устройстве обужения 20 выход 6 синтезатора частот-синхронизатора 9 соединен со входом 3 процессора сигналов 11.
Первый выход коммутатора 21 соединен со входом первого устройства памяти 22, второй выход коммутатора 21 соединен со входом второго устройства памяти 23, выход первого устройства памяти 22 соединен с первым входом устройства разности 24 и вторым входом второго устройства умножения 26, выход второго устройства памяти 23 соединен с первым устройством умножения 25, выход которого соединен со вторым входом устройства разности 24, выход которого соединен с первым входом второго устройства умножения 26, для отображения РЛ информации выход второго устройства умножения соединен с первым входом индикатора 13.
Для управления режимами работы индикатора третий выход процессора данных 12 соединен со вторым входом индикатора 13.
БРЛС в режиме обнаружения наземных и надводных целей работает следующим образом.
В режиме сканирования луча антенны в азимутальной плоскости усилитель мощности 7 передающего устройства 2 усиливает высокочастотные импульсы «f», поступающие из синтезатора частот-синхронизатора 9, и через циркулятор 3 передает их в антенну 1. Антенной эти импульсы излучаются в пространство и распространяются в направлении, определяемом передающей диаграммой направленности антенны 1. Стабильность несущей частоты «f» определяется задающим генератором 10. На вход модулятора 8 из синтезатора частот-синхронизатора 9 поступают импульсы запуска (Fn), которые формируется путем деления частоты сигнала «fr» задающего генератора 10.
Длительность импульса также формируется в синтезаторе частот-синхронизаторе 9 путем использования периода сигнала «fr».
Высокочастотный сигнал несущей частоты f также формируется синтезатором частот-синхронизатором. От задающего генератора 10 сигнал с частотой fr поступает в синтезатор частот-синхронизатор 9, умножается до частоты f и используется в качестве несущей частоты радиолокационного сигнала, излучаемого антенной 1.
Модулятор 8 осуществляет модуляцию высокочастотного сигнала «f» сформированными импульсами, поступающими в усилитель мощности 7 передающего устройства 2, имеющими заданную длительность (τ), а также период повторения (Тп), определяемый однозначной дальностью.
В процессе сканирования лучом антенны 1 излучение и прием отраженных сигналов меняется через такт по времени равный периоду повторения «Тп». В первом периоде повторения излучение и прием производится через приемо-передающую антенну 1.
Отраженные сигналы от целей и поверхности принимаются антенной 1, в которой сигналы, принятые приемной диаграммой через циркулятор 3 поступают в двухканальное приемное устройство 5. В СВЧ приемнике 14 эти сигналы в смесителе приемника смешиваются с сигналом синтезатора частот-синхронизатором fc, в результате чего образуются сигналы промежуточной частоты fnp. Сигналы промежуточной частоты fnp поступают в аналого-цифровой процессор 6, где в усилителе промежуточной частоты УПЧ 15 усиливаются и поступают в аналого-цифровой преобразователь АЦП 16, управляемый с помощью синхросигнала fca, где преобразуются в цифровую форму. С выхода АЦП 16 сигналы поступают в устройство обужения 20 цифрового процессора сигналов 11, синхронизуемого сигналом «fcn».
Прохождение сигнала по второму приемному каналу через СВЧ приемник 17, УПЧ 18 и АЦП 19 происходит аналогично прохождению через СВЧ приемник 14, УПЧ 15 и АЦП 16.
Для формирования промежуточной частоты fпр в СВЧ приемники 14 и 17 поступает гетеродинный сигнал fc, поступающий из синтезатора частот-синхронизатора 9. АЦП 16 и АЦП 19 работают с тактовой частотой (синхросигналом) fса, поступающей из синтезатора частот-синхронизатора 9.
Далее сигналы приемной диаграммы в устройстве обужения 20 поступают на коммутатор 21. С выхода коммутатора 21 сигналы поступают на первое устройство памяти UΣ 22.
Во втором периоде повторения «Тп» излучение производится через передающую диаграмму направленности антенны 1, а прием производится через специально сформированную диаграмму обужения по сигналу «Fk», выдаваемому из синтезатора частот-синхронизатора 9 в блок управления лучом 4, и цифровой процессор сигналов 11 для коммутации устройства памяти. Такой процесс передачи приема повторяется.
Отраженные сигналы, принятые специальной диаграммой обужения «UΣо», на все время обзора антенны 1 поступают в приемное устройство 5, и далее сигнал UΣо диаграммы обужения проходит аналогичную обработку сигналов UΣ, принятых приемной диаграммой, и поступает в устройство памяти 22. При такой обработке коммутатор 21 (с помощью сигнала Fk синтезатора частот-синхронизатора 9) переключает на последовательный прием, обработку и накопление сигналов в устройствах памяти 22 и 23 приемной диаграммы и диаграммы обужения антенны 1. Обужение приемной диаграммы производится в цифровом процессоре сигналов 11 в устройстве обужения 20 с помощью устройства разности 24, а также первого 25 и второго 26 устройств умножения, путем вычитания накопленных в каждом элементе дальности сигналов диаграммы обужения UΣo из сигналов в одноименных элементах дальности приемной диаграммы UΣ. Перед вычитанием сигналов, сигналы диаграммы обужения UΣо поступают из второго устройства памяти 23 в первое устройство умножения 25, где умножаются на коэффициент усиления сигналов диаграммы обужения «K». Затем умноженный сигнал обужения KUΣo поступает в устройство разности 24, куда из первого устройства памяти 22 поступают сигналы приемной диаграммы UΣ в одноименных элементах дальности.
В устройстве разности 24 производится вычитание усиленных сигналов диаграммы обужения из одноименных по дальности сигналов приемной диаграммы |UΣ|-K|UΣо|=UΣоб. Из устройства разности 24 сигналы поступают во второе устройство умножения 26, куда также поступают сигналы приемной диаграммы из первого устройства памяти 22. Во втором устройстве умножения 26 производится умножение сигналов обуженной диаграммы на сигналы первичной суммарной диаграммы UΣоб·UΣ.
В результате умножения производится дополнительное обужение диаграммы, и уменьшаются боковые лепестки первичной обуженной диаграммы.
Технический результат
Технический результат заключается в возможности обнаружения и повышении дальности обнаружения неподвижных наземных и надводных малоразмерных целей (типа танк, катер) обнаруживаемых на фоне подстилающей поверхности (земля, море) в многофункциональных радиолокационных станциях, где по условиям размещения на летательных аппаратах не удается применить антенну с апертурой необходимой для получения узкого луча. Реализация данного изобретения, учитывая прямую зависимость дальности обнаружения от величины угла диаграммы направленности, позволяет, меняя коэффициенты усиления «K» сигналов, принятых диаграммой обужения, повысить дальность обнаружения наземных неподвижных целей на фоне отражений от подстилающей поверхности пропорционально величине обужения угла.
В разделе 1 показаны варианты обужения и возможность обужения луча более чем в 3 раза, которое соответственно позволяет увеличить дальность обнаружения так же более чем в 3 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2006 |
|
RU2319173C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ПРЕПЯТСТВИЙ | 2005 |
|
RU2296344C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2004 |
|
RU2256939C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой | 2022 |
|
RU2798822C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
Изобретение относится к области радиолокации и предназначено для использования на летательных аппаратах. Техническим результатом изобретения является разработка средств многофункциональной бортовой радиолокационной станции, обеспечивающих обнаружение малоразмерных неподвижных наземных и надводных целей на фоне отражений от подстилающей поверхности. Амплитудный суммарно-суммарно-разностный способ (АССР) обужения приемной диаграммы направленности антенны заключается в том, что из суммы модулей сигналов, принятых суммарной приемной диаграммой направленности, вычитают модуль суммы сигналов, принятых диаграммой обужения. Многофункциональная радиолокационная станция для летательных аппаратов содержит цифровую фазированную антенную решетку (ЦФАР), формирующую суммарную приемо-передающую диаграмму направленности и суммарную диаграмму направленности обужения, передающее устройство, приемное устройство, задающий генератор, синтезатор частот-синхронизатор, цифровой процессор данных, цифровой процессор сигналов, включающий в себя устройство обужения, блок управления лучом (БУЛ) и индикатор, а также необходимые связи между ними. 2 н.п. ф-лы, 6 ил. 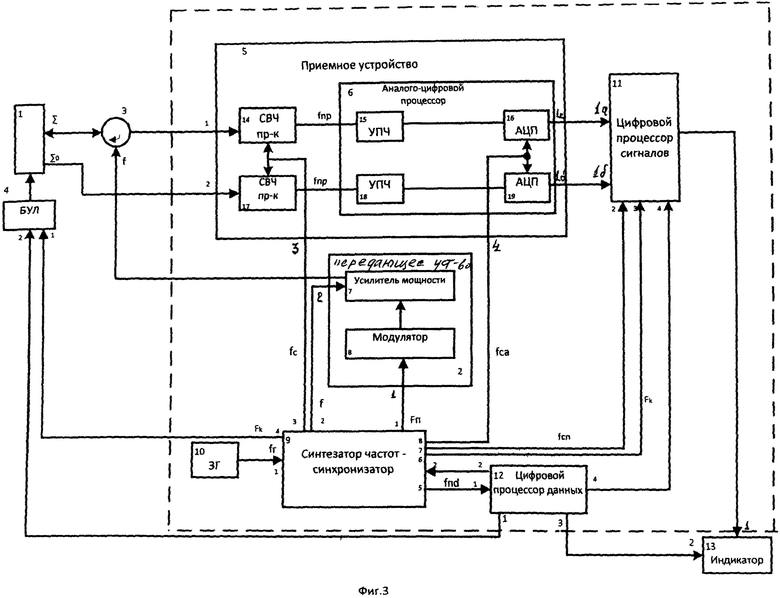
1. Амплитудный суммарно-суммарно-разностный способ (АССР) обужения приемной диаграммы направленности антенны, заключающийся в том, что из суммы модулей сигналов, принятых диаграммами направленности правой и левой частями антенной решетки, образующих суммарную приемную диаграмму направленности, вычитают модуль разности сигналов, принятых диаграммами направленности правой и левой частями антенной решетки, образующих разностную диаграмму направленности, отличающийся тем, что вместо модуля разности сигналов, принятых диаграммами направленности правой и левой частями антенной решетки, из суммы модулей сигналов, принятых диаграммами направленности правой и левой частями антенной решетки, максимумы диаграмм направленности которых сдвинуты в азимутальной плоскости на угол ΘСМ1, и образующими суммарную приемную диаграмму направленности, вычитают модуль суммы сигналов, принятых диаграммами направленности правой и левой частями антенной решетки, максимумы которых сдвинуты в азимутальной плоскости относительно максимума приемной диаграммы направленности на угол смещения ΘСМ2, образующими диаграмму обужения, при этом ΘСМ2 больше чем ΘСМ1.
2. Многофункциональная радиолокационная станция для летательных аппаратов, реализующая амплитудный суммарно-суммарно-разностный способ (АССР) обужения приемной диаграммы направленности антенны, состоящая из антенны, циркулятора передающего устройства, состоящего из последовательно соединенных модулятора и усилителя мощности, приемного устройства, состоящего из СВЧ приемника и аналого-цифрового процессора, включающего в себя усилитель промежуточной частоты (УПЧ) и аналого-цифровой преобразователь (АЦП), при этом последовательно соединенные СВЧ-приемник, УПЧ и АЦП составляют первый приемный канал, выход которого является выходом приемного устройства, задающего генератора, выход которого соединен с первым входом синтезатора частот - синхронизатора, цифрового процессора данных, индикатора и цифрового процессора сигналов, включающего в себя устройство обужения, состоящее из коммутатора, один выход которого соединен с входом первого устройства памяти, выход которого соединен с первым входом устройства разности и со вторым входом второго устройства умножения, первый вход которого соединен с выходом устройства разности, а выход подключен к выходу цифрового процессора сигналов, соединенному с первым входом индикатора, второй выход коммутатора соединен со входом второго устройства памяти, выход которого соединен со входом первого устройства умножения, выход которого соединен со вторым входом устройства разности, один вход коммутатора соединен с выходом первого приемного канала приемного устройства, а соответствующий вход коммутатора соединен с третьим входом цифрового процессора сигналов, соединенным с шестым выходом синтезатора частот - синхронизатора, первый выход синтезатора частот - синхронизатора соединен с первым входом передающего устройства, к которому подключен вход модулятора, второй выход синтезатора частот - синхронизатора - со вторым входом передающего устройства, к которому подключен второй вход усилителя мощности, третий выход синтезатора частот - синхронизатора соединен с третьим входом приемного устройства, восьмой выход синтезатора частот - синхронизатора соединен с четвертым входом приемного устройства, седьмой выход синтезатора частот - синхронизатора соединен со вторым входом цифрового процессора сигналов, пятый выход - со входом цифрового процессора данных, второй выход которого соединен со вторым входом синтезатора частот - синхронизатора, третий выход цифрового процессора данных соединен со вторым входом индикатора, четвертый выход цифрового процессора данных соединен с четвертым входом цифрового процессора сигналов, вход - выход антенны через циркулятор соединен с выходом передающего устройства; выход циркулятора соединен со входом СВЧ-приемника первого приемного канала приемного устройства, отличающаяся, тем, что антенна выполнена по структуре цифровой фазированной антенной решетки (ЦФАР), формирующей суммарную приемо-передающую диаграмму направленности и суммарную диаграмму направленности обужения, а также введен блок управления лучом (БУЛ), первый вход которого соединен с четвертым выходом синтезатора частот - синхронизатора, а второй вход - с первым выходом цифрового процессора данных, выход БУЛ соединен с управляемым входом ЦФАР, в приемное устройство введен второй приемный канал, включающий в себя последовательно соединенные СВЧ-приемник, УПЧ и АЦП, выход которого соединен со вторым входом коммутатора устройства обужения цифрового процессора сигналов, второй выход антенны соединен со входом СВЧ-приемника второго приемного канала, вторые входы СВЧ-приемников первого и второго приемных каналов объединены и подключены к третьему входу приемного устройства, вторые входы АЦП первого и второго приемных каналов объедены и подключены к четвертому входу приемного устройства.
| US 5241318 A, 31.08.1993 | |||
| US 4760399 A, 26.07.1988 | |||
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2006 |
|
RU2319173C1 |
| ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА С УПРАВЛЯЕМОЙ ШИРИНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2012 |
|
RU2507647C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |

