Изобретение относится к радиолокационной технике и может быть использовано в моноимпульсных РЛС.
Известен способ обработки радиолокационных сигналов в моноимпульсной РЛС, изложенный в патенте США US 5402130, "Monopulse processor", опубликован 28.03.1995 г., иллюстрируемый схемой, приведенной на рисунке из этого патента (фиг. 1).
В рамках указанного способа предполагается, что на вход системы обработки принимаемых радиолокационных сигналов в моноимпульсной РЛС поступают представленные своими комплексными огибающими суммарный  и разностный
и разностный  сигналы, формируемые антенной моноимпульсной РЛС. При этом фаза αd разностного сигнала d в условиях отсутствия помех и других каких-либо искажающих воздействий может отличаться от фазы αs суммарного сигнала на величину 0° или 180°
сигналы, формируемые антенной моноимпульсной РЛС. При этом фаза αd разностного сигнала d в условиях отсутствия помех и других каких-либо искажающих воздействий может отличаться от фазы αs суммарного сигнала на величину 0° или 180°  в зависимости от направления отклонения линии визирования объекта радиолокационного наблюдения от равносигнального направления антенны моноимпульсной РЛС. Здесь
в зависимости от направления отклонения линии визирования объекта радиолокационного наблюдения от равносигнального направления антенны моноимпульсной РЛС. Здесь  и
и  представляют собой абсолютные значения комплексных величин s и d.
представляют собой абсолютные значения комплексных величин s и d.
В патенте, а также источнике [Samuel М. Sherman, David K. Barton - Monopulse Principles and Techniques, sec. ed., Artech House, 2011, стр. 42, 43] указывается, что:
- случай, когда αd-αs=±90° может быть легко приведен к рассматриваемому путем включения, например, в разностный канал моноимпульсной антенны дополнительного СВЧ фазовращателя на 90°;
- в реальных условиях, в большинстве моноимпульсных РЛС, когда предполагается, что  , оценки величины угла отклонения линии визирования объекта радиолокационного наблюдения от равносигнального направления антенны аппаратурой моноимпульсной РЛС формируются по соотношению
, оценки величины угла отклонения линии визирования объекта радиолокационного наблюдения от равносигнального направления антенны аппаратурой моноимпульсной РЛС формируются по соотношению
В отсутствие помех и других каких-либо искажающих воздействий, т.е. когда  , имеет место cosα=±1. Соотношение
, имеет место cosα=±1. Соотношение  с наибольшей точностью позволяет определить абсолютное значение угла отклонения линии визирования цели от равносигнального направления антенны моноимпульсной РЛС.
с наибольшей точностью позволяет определить абсолютное значение угла отклонения линии визирования цели от равносигнального направления антенны моноимпульсной РЛС.
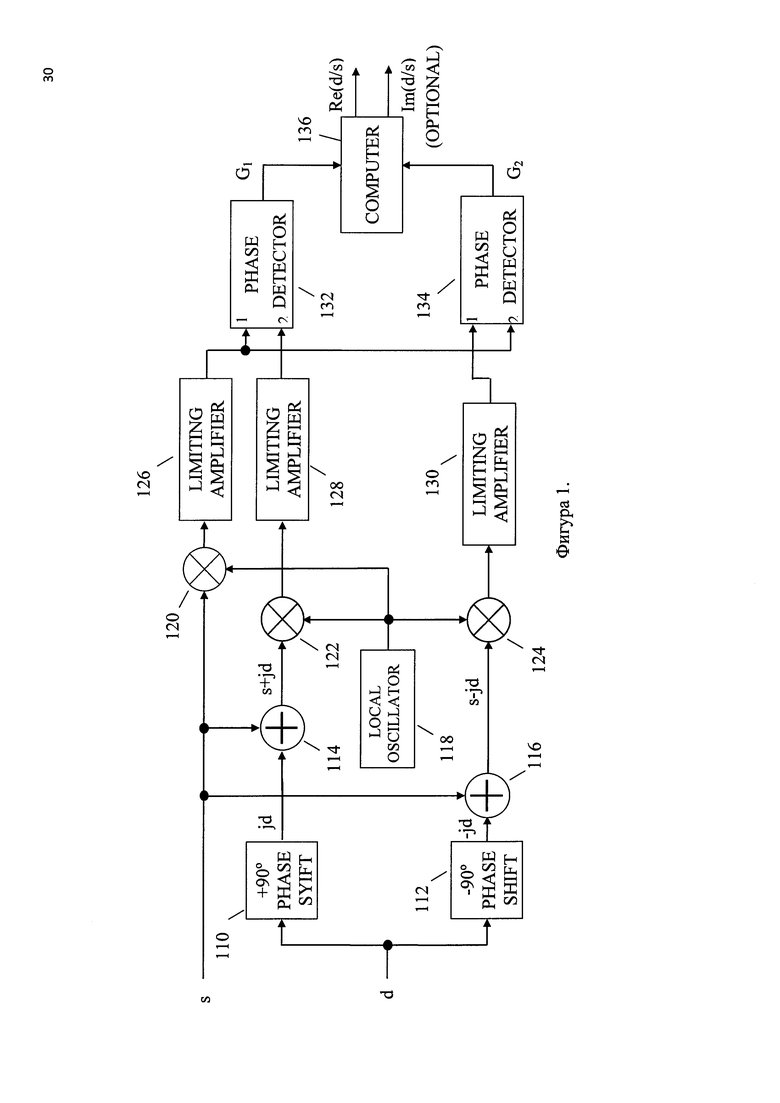
Согласно способу обработки принимаемых радиолокационных сигналов в моноимпульсной РЛС, изложенному в указанном патенте США US5402130, разностный сигнал d, поступающий из антенны моноимпульсной РЛС, подается (фиг.1) на входы фазовращателей 110 и 112, которые осуществляют фазовый сдвиг этого сигнала соответственно на +90° и -90° для формирования сигналов jd и -jd. Сигналы с выходов фазовращателей 110 и 112 выдаются соответственно на первые входы сумматоров 114 и 116, на вторые входы которых поступает суммарный сигнал s из антенны моноимпульсной РЛС. Сигналы s+jd и s-jd с выходов соответственно сумматоров 114 и 116, а также суммарный сигнал s поступают на первые входы соответственно смесителей 122, 124 и 120, на вторые входы которых поступает сигнал гетеродина 118. Смесители 120, 122, 124 обеспечивают перенос сигналов s, s+jd и s-jd на промежуточную частоту. Указанные сигналы на промежуточной частоте усиливаются соответственно усилителями 126, 128, и 130. С выхода усилителя 126 сигнал s и с выхода усилителя 128 сигнал s+jd поступают на входы фазового детектора 132, который формирует выходной сигнал, характеризующий величину угла G1 между векторами s и s+jd. С выхода усилителя 126 сигнал s и с выхода усилителя 130 сигнал s-jd поступают на входы фазового детектора 134, который формирует выходной сигнал, характеризующий величину угла G2 между векторами s и s-jd. Сигналы G1 и G2 с выходов соответственно фазовых детекторов 132 и 134 поступают на вычислитель 136, который в соответствии с выражениями
 ,
,
осуществляет вычисление вещественной Re(d/s) и мнимой Im(d/s) частей моноимпульсного отношения. Знание Re(d/s) и Im(d/s) позволяет оценить соотношение абсолютных значений s и d.
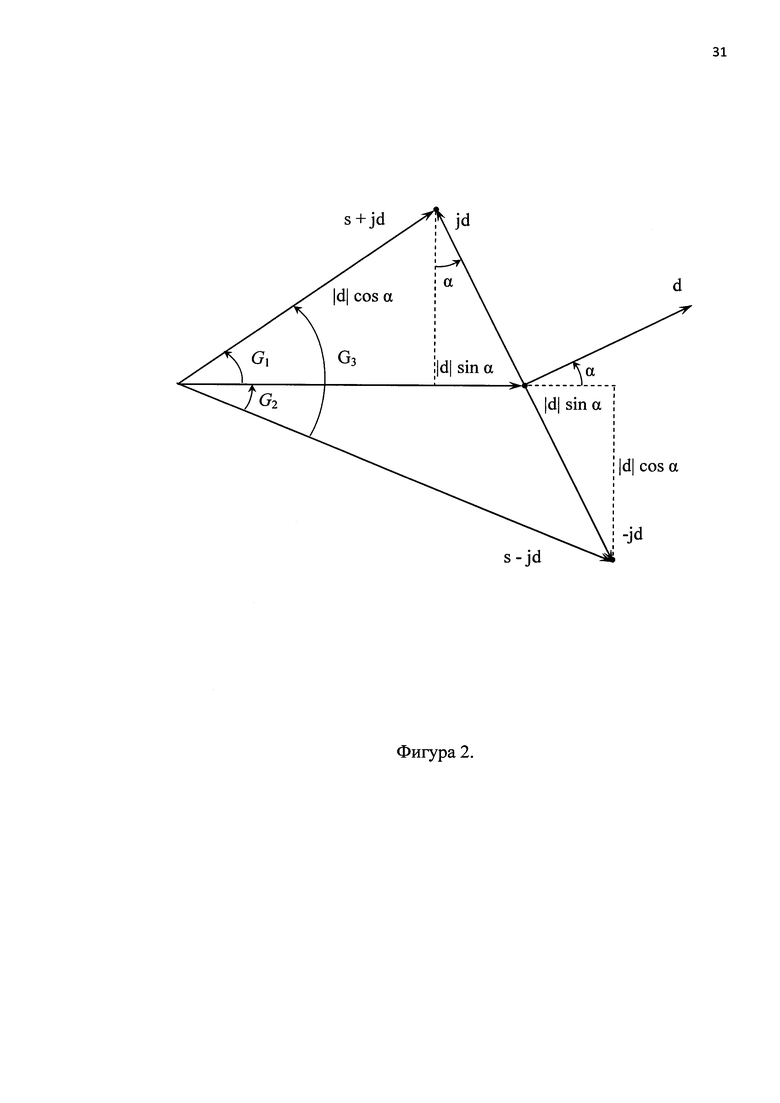
Указанная оценка вещественной и мнимой частей моноимпульсного отношения может быть получена и в том случае, когда имеют место воздействия, искажающие фазовые соотношения суммарного и разностного сигналов, поступающих из антенны моноимпульсной РЛС. Эта ситуация иллюстрируется рисунком, приведенным в указанном аналоге (фиг. 2).
Основными недостатками способа обработки принимаемых радиолокационных сигналов в моноимпульсной РЛС, изложенного в патенте США US5402130, "Monopulse processor", являются:
- необходимость применения трех раздельных каналов усиления, соответственно сигналов: s, s+jd и s-jd, что требует соответствующих аппаратурных затрат;
- необходимость обеспечения независимости фазовых характеристик каналов усиления принимаемых сигналов от их уровня. Частично эта задача решается за счет использования в каналах системы обработки усилителей с жестким ограничением уровня усиливаемых сигналов. Однако в этом случае возможно подавление слабых полезных сигналов мешающими сильными.
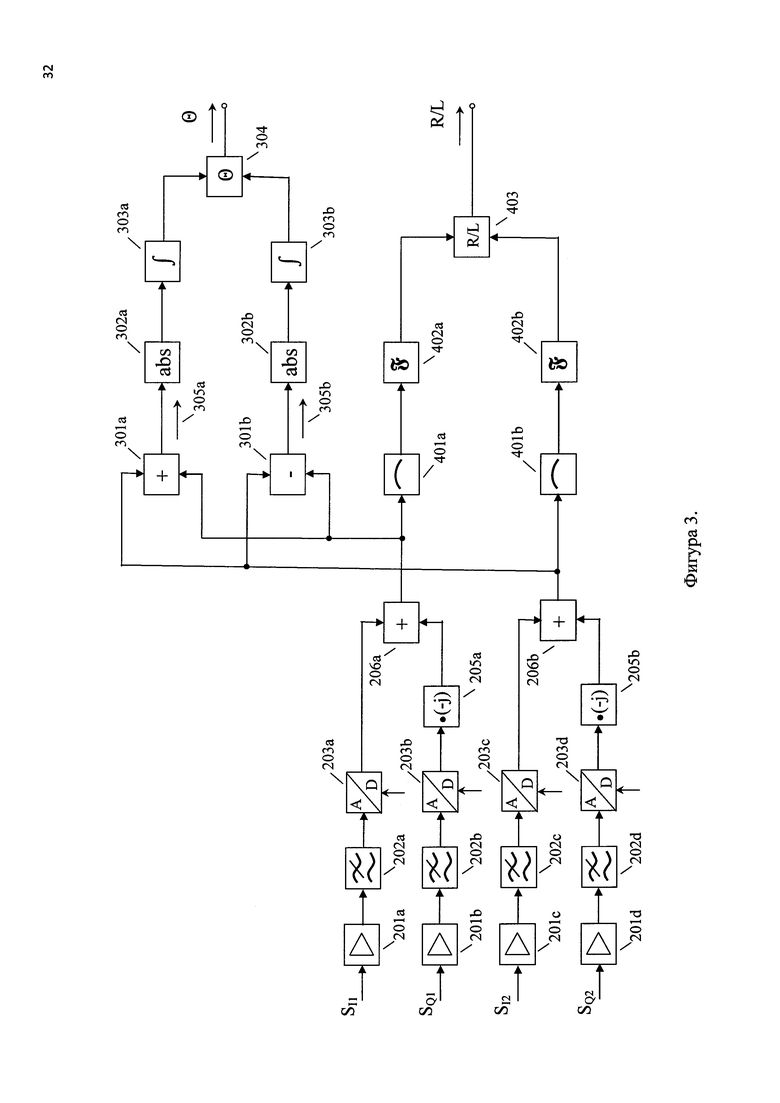
Известен также способ обработки принимаемых радиолокационных сигналов в моноимпульсной РЛС, изложенный в патенте Германии DE 102005060875 A1, опубликован 21.06.2007 г., "Verfahren und Vorrichtung zur Signalverarbeitung bei einer Winkelbestimmung mittels Mikrowellen-Bewegungssensoren" ("Метод и устройство обработки сигналов для определения угла микроволновыми подвижными сенсорами"), иллюстрируемый схемой из указанного патента (фиг. 3).
Согласно этому аналогу импульсные радиолокационные сигналы, принимаемые парциальными антеннами, составляющими антенну моноимпульсной РЛС, при каждом зондировании, с использованием стабилизированного генератора, формирующего несущую частоту зондирующих сигналов, переносятся на видеочастоту. При этом переносе формируются видеосигналы, соответствующие вещественной и мнимой частям принимаемых сигналов в принимающих парциальных каналах. Для рассматриваемого в патенте варианта фазовой моноимпульсной системы с двумя парциальными приемными антеннами формируются видеосигналы: SI1, SQ1 (соответствующие синфазной и квадратурной составляющим сигналов, принимаемых первой парциальной антенной) и SI2, SQ2 (соответствующие синфазной и квадратурной составляющим сигналов, принимаемых второй парциальной антенной). Каждый из этих сигналов усиливается (на схеме фиг. 3 - элементы 201а-201d) в соответствующем приемном канале, подвергается в этом канале низкочастотной фильтрации (элементы 202а-202d) и затем аналого-цифровому преобразованию (элементы 203а-203d). Значения оцифрованных квадратурных составляющих сигналов первого (SQ1) и второго (SQ2) приемных каналов умножаются на -j (элементы 205а и 205b схемы) и суммируются (элементы 206а и 206b схемы) с соответствующими значениями оцифрованных синфазных составляющих сигналов первого (SI1) и второго (SI2) приемных каналов.
Формирующиеся соответственно на выходах элементов 206а и 206b схемы (фиг. 3) при каждом зондировании цифровые значения s1(ti) и s2(ti), представляющие собой результаты суммирования, поступают на входы суммирующего элемента 301а и вычитающего элемента 301b. На основе выполнения операции суммирования на выходе элемента 301а формируются оценки, соответствующие абсолютной величине суммарного сигнала

а на основе выполнения операции вычитания на выходе элемента 30lb формируются оценки

соответствующие абсолютной величине разностного сигнала в моноимпульсной РЛС.
Далее эти значения фильтруются с использованием метода скользящего среднего (соответственно элементами 303а и 303b на схеме фиг. 3) и на основе получаемых средних значений mSUM и mDIFF рассчитывается значение моноимпульсного отношения mSUM / mDIFF, с использованием которого формируется оценка абсолютного значения угла визирования наблюдаемого объекта относительно равносигнального направления антенны моноимпульсной РЛС.
Знак этого угла определяется с использованием сопоставительных оценок (элемент 403 на схеме фиг. 3) в частотной области аргументов комплексных величин (соответствующих сигналам, поступающим с парциальных антенн моноимпульсной РЛС), получаемых путем (подпачечного) накопления значений s1(ti) и s2(ti) (в первом варианте предложенного в изобретении метода обработки), их оконной обработки (элементы 401а и 401b на схеме фиг. 3) и преобразования Фурье накопленных подпачек значений (элементы 402а и 402b).
К основным недостаткам данного изобретения могут быть отнесены:
- необходимость использования четырех каналов приема, усиления и преобразования поступающих на вход системы обработки радиолокационных сигналов в моноимпульсной РЛС, что требует повышенных аппаратурных затрат;
- необходимость обеспечения идентичности как амплитудных, так и фазовых характеристик каналов приема и усиления и преобразования сигналов: SI1, SQ1, SI2, SQ2;
- возможность возникновения дополнительных угловых ошибок моноимпульсного пеленгования в том случае, когда имеют место внешние и внутренние воздействия, искажающие фазовые соотношения сигналов, формирующих SSUM и SDIFF.
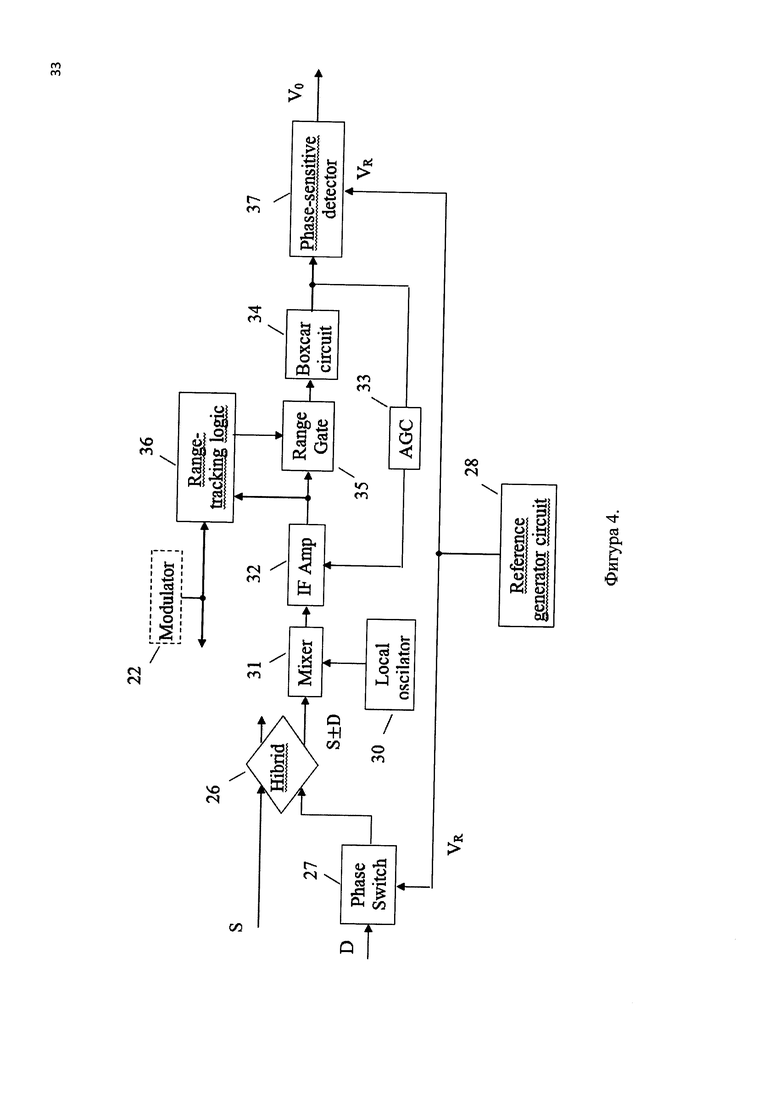
Наиболее близким к предлагаемому способу обработки радиолокационной информации в моноимпульсной РЛС является способ, описанный в патенте США № 5926128, опубликован 20.07.1999 г., "Radar systems", в котором осуществляется одноканальная обработка радиолокационной информации в соответствии с приведенной схемой (фиг. 4). Данный способ рассматривается в качестве прототипа.
В рамках этого способа предполагается, что на вход одноканальной системы обработки принимаемых радиолокационных сигналов в моноимпульсной РЛС, как показано на схеме (фиг. 4), поступают суммарный S и разностный D сигналы, формируемые антенной РЛС, реализующей амплитудное моноимпульсное пеленгование. В зависимости от направления отклонения линии визирования наблюдаемого радиолокационного объекта от равносигнального направления антенны разностный сигнал может быть синфазным с суммарным сигналом (положительное значение разностного сигнала) или противофазным (отрицательное значение разностного сигнала).
Разностный сигнал из антенного устройства поступает на вход фазовращателя 27, который в соответствии с полярностью тактирующего видеосигнала VR, формируемого опорным генератором 28, попеременно осуществляет сдвиг фазы разностного сигнала на величину 0° и 180°. Разностный сигнал ±D вместе с суммарным сигналом поступает в гибридную схему 26, на выходе которой формируется сигнал S±D, представляющий собой суммарный сигнал, модулированный по амплитуде разностным сигналом с частотой опорного тактирующего сигнала VR, как показано на фиг. 5. На приведенном рисунке частота следования зондирующих импульсов моноимпульсной РЛС в восемь раз больше частоты видеосигнала VR, управляющего фазовращателем 27.
Сигналы S±D вместе с сигналом, формируемым гетеродином 30, поступают на смеситель 31, который осуществляет перенос принимаемых РЛС сигналов на промежуточную частоту. Эти сигналы усиливаются усилителем промежуточной частоты 32, коэффициент передачи которого регулируется с помощью устройства 33 автоматической регулировки усиления, стробируются устройством 35, управляемым по временной задержке принимаемых сигналов относительно излученных устройством 36, работа которого синхронизируется модулятором 22, преобразовываются в видеосигналы, подвергаясь расширению и узкополосной фильтрации устройством 34, и поступают на управляемое фазочувствительное устройство 37. На это же устройство поступает тактирующий сигнал VR, под управлением которого с использованием сглаживающей (низкочастотной) фильтрации на выходе управляемого фазочувствительного устройства 37 формируется сигнал, пропорциональный соотношению (фиг. 6)
Т1 (S+D)-T2(S-D),
в котором величины T1 и Т2 представляют собой длительности интервалов времени, в течение которых осуществляется накопление и выравнивание накопленных уровней принимаемых радиолокационных сигналов в положениях управляемого СВЧ фазовращателя 27, соответствующих формированию разностных сигналов +D и -D. Случай минимальных значений T1 и Т2, когда также T1=Т2, соответствует череспериодному переключению фазовращателя 27.
Из приведенного выражения видно, что сигнал на выходе фазочувствительного устройства 37 приемного устройства РЛС, формируемый по указанному соотношению, пропорционален глубине амплитудной модуляции суммарного сигнала S разностным D и, соответственно, величине угла отклонения направления на радиолокационную цель от равносигнального направления антенны моноимпульсной радиолокационной системы. Полярность этого сигнала относительно полярности сигнала VR позволяет определить направление отклонения линии визирования объекта радиолокационного наблюдения от равносигнального направления антенны РЛС.
Основными недостатками прототипа являются:
- при нелинейности амплитудной характеристики приемного канала РЛС возможно искажение параметров амплитудной модуляции суммарного сигнала разностным, что может привести к возникновению дополнительных угловых ошибок пеленгования объекта радиолокационного наблюдения;
- возможность изменения глубины амплитудной модуляции суммарного сигнала разностным и, соответственно, величины формируемого моноимпульсного отношения, в том случае, когда имеют место внешние и внутренние воздействия, искажающие фазовые соотношения суммарного и разностного сигналов, поступающих из антенны моноимпульсной РЛС (аналогично тому, как показано на фиг. 2);
- трудности применения данного изобретения при решении задачи одновременного обнаружения и моноимпульсного пеленгования нескольких объектов радиолокационного наблюдения, так как соотношение длительностей временных интервалов, в течение которых осуществляется накопление принимаемых радиолокационных сигналов в различающихся положениях управляемого СВЧ фазовращателя разностного сигнала, зависит от условий визирования одного конкретного объекта.
Целью (техническим результатом) настоящего изобретения является повышение точности и расширение функциональных возможностей моноимпульсного пеленгования при использовании одноканального приемного устройства в моноимпульсной РЛС.
Для достижения заявленной цели в соответствии с настоящим изобретением в процессе обработки радиолокационной информации в моноимпульсной РЛС осуществляются:
- череспериодная (от зондирования к зондированию) фазовая манипуляция разностного сигнала  , поступающего с выхода суммарно-разностного преобразователя антенны моноимпульсной РЛС. Здесь
, поступающего с выхода суммарно-разностного преобразователя антенны моноимпульсной РЛС. Здесь  комплексная огибающая разностного сигнала;
комплексная огибающая разностного сигнала;
- векторное сложение фазоманипулированного через период зондирования разностного сигнала  с суммарным сигналом
с суммарным сигналом  , поступающим с суммарного выхода суммарно-разностного преобразователя антенны моноимпульсной РЛС. Здесь
, поступающим с суммарного выхода суммарно-разностного преобразователя антенны моноимпульсной РЛС. Здесь  - комплексная огибающая суммарного сигнала;
- комплексная огибающая суммарного сигнала;
- перенос результирующего сигнала, соответствующего  , на промежуточную частоту, его одноканальное усиление на промежуточной частоте, синхронное квадратурное детектирование;
, на промежуточную частоту, его одноканальное усиление на промежуточной частоте, синхронное квадратурное детектирование;
- аналого-цифровое преобразование вещественных и мнимых частей результирующих усиленных и продетектированных сигналов  с их последующим цифровым сжатием (в случае использования внутриимпульсной модуляции) в каждом интервале приема радиолокационных сигналов и образованием отсчетов вещественных
с их последующим цифровым сжатием (в случае использования внутриимпульсной модуляции) в каждом интервале приема радиолокационных сигналов и образованием отсчетов вещественных  и мнимых
и мнимых  ,
,  частей оцифрованных результирующих сигналов
частей оцифрованных результирующих сигналов  . При этом моменты {tm},
. При этом моменты {tm},  формирования указанных отсчетов на каждом интервале приема радиолокационных сигналов соответствуют формируемым каналам обнаружения объектов радиолокационного наблюдения по дальности. Под интервалами приема понимаются временные промежутки между излучением зондирующих импульсов.
формирования указанных отсчетов на каждом интервале приема радиолокационных сигналов соответствуют формируемым каналам обнаружения объектов радиолокационного наблюдения по дальности. Под интервалами приема понимаются временные промежутки между излучением зондирующих импульсов.
Далее, в отличие от известных аналогов и прототипа, осуществляются:
- когерентное накопление в каждом (m-м,  ) канале дальности оцифрованных результатов векторного сложения суммарного сигнала и фазоманипулированного через период зондирования разностного сигнала, полученных в соседних интервалах приема (зондированиях) радиолокационных сигналов, с образованием подпачек оцифрованных значений вещественных и мнимых
) канале дальности оцифрованных результатов векторного сложения суммарного сигнала и фазоманипулированного через период зондирования разностного сигнала, полученных в соседних интервалах приема (зондированиях) радиолокационных сигналов, с образованием подпачек оцифрованных значений вещественных и мнимых  ,
,  , частей результирующих цифровых сигналов
, частей результирующих цифровых сигналов  ,
,  ,
,  . Здесь n - порядковый номер интервала приема радиолокационных сигналов в накапливаемой подпачке;
. Здесь n - порядковый номер интервала приема радиолокационных сигналов в накапливаемой подпачке;
- корректировка значений аргументов комплексных величин  ,
,  , накопленных в подпачках в каждом канале дальности с учетом ожидаемых (в том числе доплеровских) набегов фазы принимаемых радиолокационных сигналов за время накопления подпачки;
, накопленных в подпачках в каждом канале дальности с учетом ожидаемых (в том числе доплеровских) набегов фазы принимаемых радиолокационных сигналов за время накопления подпачки;
- цифровое гетеродинирование сигналов, представленных в каждом канале дальности в виде значений комплексных величин  ,
,  , накопленных в подпачках, обеспечивающее последующий сдвиг отсчетов суммарных сигналов, принимаемых моноимпульсной РЛС, в середину анализируемой частотной области (см. ниже);
, накопленных в подпачках, обеспечивающее последующий сдвиг отсчетов суммарных сигналов, принимаемых моноимпульсной РЛС, в середину анализируемой частотной области (см. ниже);
- оконное взвешивание в каждом канале дальности значений накопленных подпачек и быстрое преобразование Фурье (БПФ) этих взвешенных подпачек;
- обнаружение (при необходимости) в каждом канале дальности и в каждом частотном канале в заданной части частотной области, сформированной БПФ, сигналов  , соответствующих сигналам, поступающим с суммарного выхода моноимпульсной антенны РЛС;
, соответствующих сигналам, поступающим с суммарного выхода моноимпульсной антенны РЛС;
- определение в каждом канале дальности номеров частотных фильтров, соответствующих разностным сигналам, сопоставляемым частотным фильтрам, в которых определяется суммарный сигнал;
- вычисление абсолютных значений суммарных и соответствующих им разностных сигналов, а также абсолютных значений соответствующих моноимпульсных отношений;
- определение знаков вычисленных моноимпульсных отношений, соответствующих направлениям отклонения линий визирования объектов радиолокационного наблюдения от равносигнального направления антенны моноимпульсной РЛС в рассматриваемой плоскости пеленгования.
Описание настоящего изобретения поясняется следующими схемами и диаграммами:
Фиг. 1 - Общая схема обработки радиолокационных сигналов в моноимпульсной РЛС согласно аналогу [1];
Фиг. 2 - Векторная диаграмма, иллюстрирующая процесс обработки радиолокационных сигналов в моноимпульсной РЛС, используемый аналогом [1];
Фиг. 3 - Общая схема обработки радиолокационных сигналов в моноимпульсной РЛС согласно аналогу [3];
Фиг. 4 - Общая схема обработки радиолокационных сигналов в моноимпульсной РЛС, используемая прототипом;
Фиг. 5 - Временные диаграммы формирования обрабатываемых сигналов в прототипе;
Фиг. 6 - Временная диаграмма сигнала, формируемого прототипом в результате обработки;
Фиг. 7 - Пример устройства, схема обработки радиолокационных сигналов, в котором соответствует способу, предлагаемому в настоящем изобретении;
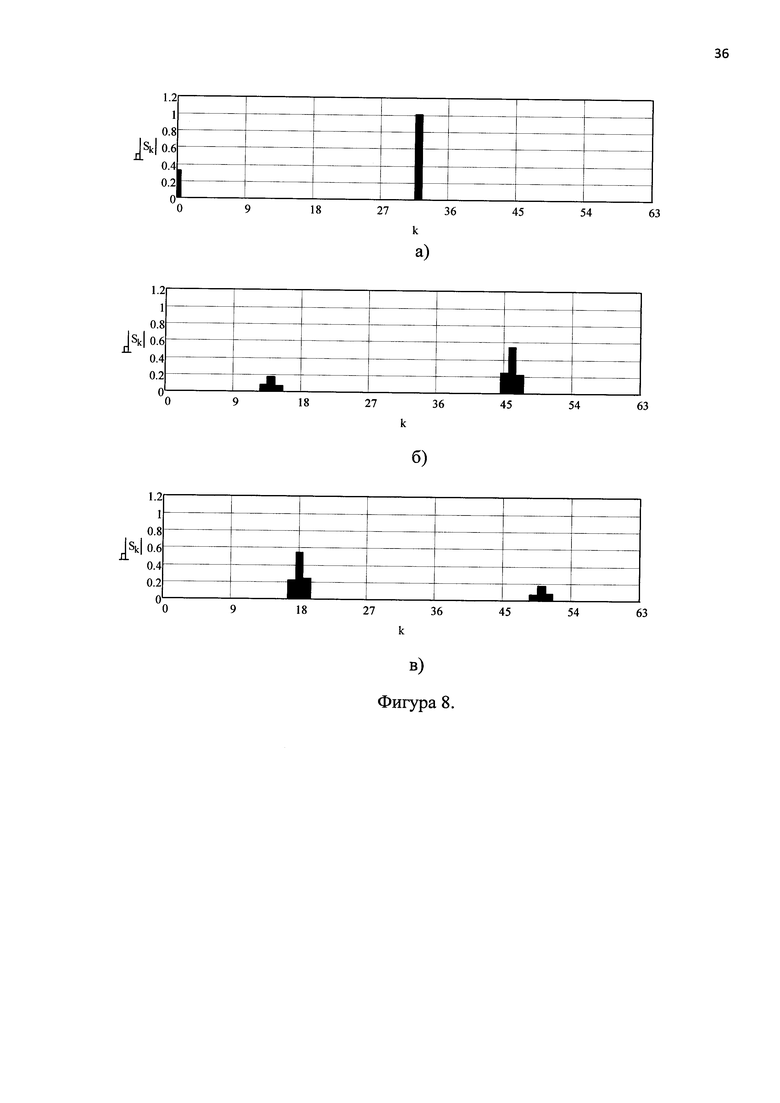
Фиг. 8 - Примеры распределения откликов принимаемых радиолокационных сигналов, формируемых в результате использования предлагаемого способа обработки сигналов, в частотной области.
Достижение технического результата настоящего изобретения может быть получено, например, с использованием показанного на фиг. 7 устройства, схема построения которого соответствует схеме обработки радиолокационных сигналов в моноимпульсной РЛС в соответствии с настоящим изобретением. На фиг. 7:
1 - фазовращатель (ФВ);
2 - управляемый фазовращатель (УФВ);
3 - векторный сумматор;
4 - смеситель (СМ);
5 - формирователь опорных частот (ФОЧ);
6 - усилитель промежуточной частоты (УПЧ);
7 - синхронный детектор (СД);
8 - устройство аналого-цифрового преобразования и цифровой согласованной фильтрации (АЦПФ);
9 - управляемый формирователь подпачек (УФП);
10 - преобразователь время-частота (ПВЧ);
11 - формирователь отсчетов (ФОТ) суммарных и разностных сигналов;
12 - устройство стробирования и синхронизации (УСС);
13 - вычислительно-управляющая система (ВУС).
В рамках предлагаемого способа обработки радиолокационных сигналов в моноимпульсной РЛС предполагается, что с выходов антенны этой РЛС после суммарно-разностного преобразования принимаемых радиолокационных сигналов в обработку поступают суммарный и разностный сигналы, комплексные огибающие которых  и
и  . В рассматриваемом примере реализации устройства, использующего предлагаемый способ обработки радиолокационных сигналов в моноимпульсной РЛС, аргументы αs(t) и αd(t) различаются между собой в условиях отсутствия помех и других каких-либо искажающих воздействий на величину 0° или 180° (т.е. эти сигналы синфазны или противофазны) в зависимости от знака угла отклонения линии визирования объекта радиолокационного наблюдения от равносигнального направления антенны моноимпульсной РЛС. Как указывается в источнике [2], данные соотношения фаз суммарного и разностного сигналов соответствуют случаю амплитудного пеленгования. Если антенной моноимпульсной РЛС осуществляется фазовое пеленгование, требуемое соотношение фаз αs(t) и αd(t) может быть получено включением дополнительного фазовращателя в суммарный или разностный канал поступления сигналов. Последний вариант иллюстрируется включением в схему, приведенную на фиг. 7, фазовращателя (ФВ) 1, контур которого показан пунктирной линией. Включение фазовращателя 1 в канал поступления разностного сигнала в большинстве случаев является предпочтительным, так как при этом не вносятся дополнительные потери, ухудшающие возможности начального обнаружения лоцируемых объектов по уровню суммарного сигнала.
. В рассматриваемом примере реализации устройства, использующего предлагаемый способ обработки радиолокационных сигналов в моноимпульсной РЛС, аргументы αs(t) и αd(t) различаются между собой в условиях отсутствия помех и других каких-либо искажающих воздействий на величину 0° или 180° (т.е. эти сигналы синфазны или противофазны) в зависимости от знака угла отклонения линии визирования объекта радиолокационного наблюдения от равносигнального направления антенны моноимпульсной РЛС. Как указывается в источнике [2], данные соотношения фаз суммарного и разностного сигналов соответствуют случаю амплитудного пеленгования. Если антенной моноимпульсной РЛС осуществляется фазовое пеленгование, требуемое соотношение фаз αs(t) и αd(t) может быть получено включением дополнительного фазовращателя в суммарный или разностный канал поступления сигналов. Последний вариант иллюстрируется включением в схему, приведенную на фиг. 7, фазовращателя (ФВ) 1, контур которого показан пунктирной линией. Включение фазовращателя 1 в канал поступления разностного сигнала в большинстве случаев является предпочтительным, так как при этом не вносятся дополнительные потери, ухудшающие возможности начального обнаружения лоцируемых объектов по уровню суммарного сигнала.
С выхода фазовращателя 1 (при наличии такового) разностный сигнал  поступает на первый вход управляемого фазовращателя (УФВ) 2, который осуществляет череспериодный (от зондирования к зондированию) поворот фазы разностного сигнала на величину +90° или -90° относительно фазы суммарного сигнала, формируя на каждом интервале приема радиолокационных сигналов (между зондированиями) произведение
поступает на первый вход управляемого фазовращателя (УФВ) 2, который осуществляет череспериодный (от зондирования к зондированию) поворот фазы разностного сигнала на величину +90° или -90° относительно фазы суммарного сигнала, формируя на каждом интервале приема радиолокационных сигналов (между зондированиями) произведение  , или
, или  , в соответствии с управляющим сигналом, поступающим на второй вход управляемого фазовращателя 2 с первого выхода устройства стробирования и синхронизации 12. С выхода управляемого фазовращателя 2 сигнал
, в соответствии с управляющим сигналом, поступающим на второй вход управляемого фазовращателя 2 с первого выхода устройства стробирования и синхронизации 12. С выхода управляемого фазовращателя 2 сигнал  поступает на первый вход СВЧ устройства суммирования 3, на второй вход которого поступает суммарный сигнал
поступает на первый вход СВЧ устройства суммирования 3, на второй вход которого поступает суммарный сигнал  с выхода антенны моноимпульсной РЛС. С выхода СВЧ устройства суммирования 3 сформированный результирующий сигнал
с выхода антенны моноимпульсной РЛС. С выхода СВЧ устройства суммирования 3 сформированный результирующий сигнал  поступает на первый вход смесителя (СМ) 4, на второй вход которого поступает сигнал когерентного гетеродина с первого выхода высокостабильного формирователя опорных частот (ФОЧ) 5.
поступает на первый вход смесителя (СМ) 4, на второй вход которого поступает сигнал когерентного гетеродина с первого выхода высокостабильного формирователя опорных частот (ФОЧ) 5.
Смеситель 4 осуществляет перенос на промежуточную частоту сигнала , поступающего на его первый вход. Выходной сигнал смесителя 4 поступает на первый вход одноканального усилителя промежуточной частоты (УПЧ) 6, на второй вход которого поступают с выхода 3 вычислительно-управляющей системы (ВУС) 13 сигналы (или команды), обеспечивающие необходимую регулировку коэффициента усиления УПЧ 6.
Следует отметить, что использование фазовой манипуляции (от зондирования к зондированию) разностного сигнала, при которой вектор разностного сигнала занимает положение ±90° относительно вектора суммарного сигнала, обеспечивает существенно меньший уровень колебаний абсолютного значения  результата векторного суммирования суммарного и разностного сигналов по сравнению с модуляцией (осуществляемой в прототипе), что существенно снижает требования к линейности амплитудной характеристики устройств преобразования и усиления сигналов приемного канала. Также снижаются требования и к амплитудно-фазовым характеристикам этого канала.
результата векторного суммирования суммарного и разностного сигналов по сравнению с модуляцией (осуществляемой в прототипе), что существенно снижает требования к линейности амплитудной характеристики устройств преобразования и усиления сигналов приемного канала. Также снижаются требования и к амплитудно-фазовым характеристикам этого канала.
С выхода усилителя промежуточной частоты 6 усиленный сигнал поступает на первый вход синхронного детектора (СД) 7, на второй вход которого со второго выхода высокостабильного формирователя опорных частот 5 поступает высокостабильный опорный сигнал промежуточной частоты, обеспечивающий формирование на выходах 1 и 2 синхронного детектора 7 видеосигналов, соответствующих вещественной  и мнимой
и мнимой  частям сигнала
частям сигнала  . Видеосигналы с выходов 1 и 2 синхронного детектора 7 поступают на входы 1 и 2 устройства 8 (АЦПФ) двухканального аналого-цифрового преобразования и согласованной цифровой фильтрации (сжатия) принимаемых сигналов. Эта фильтрация осуществляется при использовании в моноимпульсной РЛС зондирующих радиолокационных сигналов с внутриимпульсной модуляцией.
. Видеосигналы с выходов 1 и 2 синхронного детектора 7 поступают на входы 1 и 2 устройства 8 (АЦПФ) двухканального аналого-цифрового преобразования и согласованной цифровой фильтрации (сжатия) принимаемых сигналов. Эта фильтрация осуществляется при использовании в моноимпульсной РЛС зондирующих радиолокационных сигналов с внутриимпульсной модуляцией.
Поступившие сигналы в АЦПФ оцифровываются двухканальным аналого-цифровым преобразователем на временных интервалах приема (располагающихся в промежутках между излучением зондирующих импульсов), соответствующих стробу приема, формируемому в соответствии с управляющими сигналами, поступающими на вход 4 АЦПФ со второго выхода устройства стробирования и синхронизации (УСС) 12. Аналого-цифровое преобразование вещественной и мнимой частей сигналов  на интервалах приема при каждом зондировании осуществляется под управлением сигнала, поступающего на вход 3 АЦПФ с третьего выхода высокостабильного формирователя опорных частот 5, в моменты времени {tm},
на интервалах приема при каждом зондировании осуществляется под управлением сигнала, поступающего на вход 3 АЦПФ с третьего выхода высокостабильного формирователя опорных частот 5, в моменты времени {tm},  ,
,  , отсчитываемые от момента излучения зондирующего сигнала моноимпульсной РЛС. Для случая использования радиолокационных сигналов с внутриимпульсной модуляцией
, отсчитываемые от момента излучения зондирующего сигнала моноимпульсной РЛС. Для случая использования радиолокационных сигналов с внутриимпульсной модуляцией  , где К - коэффициент сжатия сигнала. Далее, для упрощения последующего изложения предлагаемого способа, полагаем, что К=1.
, где К - коэффициент сжатия сигнала. Далее, для упрощения последующего изложения предлагаемого способа, полагаем, что К=1.
Оцифрованные комплексные огибающие  , представленные соответствующими значениями их вещественной
, представленные соответствующими значениями их вещественной  и мнимой
и мнимой  частей, где {tm},
частей, где {tm},  - моменты времени, соответствующие формируемым (М) каналам дальности строба дальности, поступают соответственно с первого и второго выходов АЦПФ 8 на первый и второй входы управляемого формирователя подпачек (УФП) 9.
- моменты времени, соответствующие формируемым (М) каналам дальности строба дальности, поступают соответственно с первого и второго выходов АЦПФ 8 на первый и второй входы управляемого формирователя подпачек (УФП) 9.
В управляемом формирователе подпачек 9, работа которого синхронизируется сигналами, поступающими на его третий вход с третьего выхода устройства стробирования и синхронизации 12, в каждом (m-м,  ) канале дальности осуществляется накопление значений
) канале дальности осуществляется накопление значений  , получаемых в N соседних интервалах приема радиолокационных сигналов (в N зондированиях) в этом канале. В результате формируются М подпачек значений (цифровых сигналов), которые могут быть записаны в виде
, получаемых в N соседних интервалах приема радиолокационных сигналов (в N зондированиях) в этом канале. В результате формируются М подпачек значений (цифровых сигналов), которые могут быть записаны в виде
 ,
, 
где:
n - порядковый номер интервала приема (зондирования) в подпачке 
Cn,  - коэффициенты, значение которых (+1 или -1) на (n-м) интервале приема согласовано с управляющим сигналом, поступающим на второй вход управляемого фазовращателя 2 с первого выхода устройства стробирования и синхронизации 12. При череспериодной фазовой манипуляции разностного сигнала возможные последовательности значений этих коэффициентов в накапливаемых подпачках:
- коэффициенты, значение которых (+1 или -1) на (n-м) интервале приема согласовано с управляющим сигналом, поступающим на второй вход управляемого фазовращателя 2 с первого выхода устройства стробирования и синхронизации 12. При череспериодной фазовой манипуляции разностного сигнала возможные последовательности значений этих коэффициентов в накапливаемых подпачках:  и
и  ,
,  ;
;
ϕm,n - набег фазы сигналов, принимаемых моноимпульсной РЛС в m-м канале дальности в n-м периоде приема сигналов с момента начала накопления подпачек, возникающий, например, за счет изменения расстояния до объектов, наблюдаемых в m-м канале дальности. В случае наличия только одного объекта радиолокационного наблюдения в m-м канале дальности, когда радиальная скорость движения этого объекта относительно моноимпульсной РЛС не изменяется, можно записать
 ,
, 
где:
Fdm - доплеровский сдвиг несущей частоты радиолокационных откликов, поступающих от объекта радиолокационного наблюдения, находящегося в m-м канале дальности;
Tr - период повторения зондирующих импульсов моноимпульсной РЛС;
Δϕm - набег фазы сигналов, принимаемых моноимпульсной РЛС в m-м канале дальности за период повторения зондирующих импульсов. В данном случае  .
.
Далее индекс m, отражающий номер канала дальности, с целью упрощения используемых обозначений, опускается.
В управляемом формирователе подпачек 9 в каждом канале дальности осуществляется корректировка цифровых значений аргументов  ,
,  комплексных величин (цифровых сигналов)
комплексных величин (цифровых сигналов)  ,
,  на величину межпериодной фазовой поправки Δφ, поступающей на вход 4 управляемого формирователя подпачек с выхода 1 вычислительно-управляющей системы 13.
на величину межпериодной фазовой поправки Δφ, поступающей на вход 4 управляемого формирователя подпачек с выхода 1 вычислительно-управляющей системы 13.
Такая корректировка,
 ,
,  ,
,
цифровых значений аргументов комплексных величин ,  , осуществляемая в каждом канале дальности, направлена на компенсацию указанных выше фазовых набегов, которые могут возникать во время накопления подпачек оцифрованных значений ,
, осуществляемая в каждом канале дальности, направлена на компенсацию указанных выше фазовых набегов, которые могут возникать во время накопления подпачек оцифрованных значений ,  .
.
Указанные фазовые поправки могут определяться, например, исходя из:
- оценки текущей скорости Vr сближения с визируемым радиолокационным объектом, например, в режиме его автосопровождения;
- оценки текущей скорости сближения с реальной или расчетной опорной точкой, например, при осуществлении фокусировки в режиме синтезирования антенного раскрыва при радиолокационном картографировании земной поверхности, осуществляемом с борта подвижного носителя моноимпульсной РЛС.
При известной величине скорости Vr сближения моноимпульсной РЛС с объектом радиолокационного наблюдения величина фазовой поправки определяется выражением
 ,
,
где:
λ - длина волны, соответствующая несущей частоте зондирующих сигналов РЛС.
Vr определяется как производная от дальности до объекта радиолокационного наблюдения.
Сформированные в каналах дальности подпачки значений
 ,
, 
с выхода управляемого формирователя подпачек (9) поступают на вход цифрового преобразователя время-частота (ПВЧ) 10.
В преобразователе время-частота 10 подпачки значений  ,
,  подвергаются цифровому гетеродинированию (путем домножения значений
подвергаются цифровому гетеродинированию (путем домножения значений  на (-1)n), оконному взвешиванию с использованием окон типа Хемминга, Кайзера и др., и затем быстрому преобразованию Фурье (БПФ). Число точек БПФ соответствует размеру (N) накопленных подпачек.
на (-1)n), оконному взвешиванию с использованием окон типа Хемминга, Кайзера и др., и затем быстрому преобразованию Фурье (БПФ). Число точек БПФ соответствует размеру (N) накопленных подпачек.
Как будет показано ниже, процедура цифрового гетеродинирования обеспечивает упрощение последующей обработки данных.
В результате указанных преобразований в каждом канале дальности формируется совокупность отсчетов
 ,
,  ,
,  ,
,
соответствующих принимаемым радиолокационным сигналам в частотной области.
Здесь:
Wn,  - коэффициенты используемого взвешивающего окна;
- коэффициенты используемого взвешивающего окна;
k - номер отсчета в частотной области (номер частотного фильтра).
Результаты БПФ с выхода преобразователя время-частота 10 поступают на вход формирователя отсчетов (ФОТ) 11.
При наличии в канале дальности радиолокационного отклика от цели БПФ осуществляет в этом канале разделение отсчетов, соответствующих суммарному  сигналу и разностному манипулированному по фазе сигналу
сигналу и разностному манипулированному по фазе сигналу  (векторно просуммированным во временной области сумматором 3) по частотным дискретам (частотным фильтрам), сформированной частотной области.
(векторно просуммированным во временной области сумматором 3) по частотным дискретам (частотным фильтрам), сформированной частотной области.
При этом разделении по окончании БПФ накопленной подпачки в каждом канале дальности при условии точной компенсации в управляемом формирователе подпачек 9 указанных ранее набегов фазы принимаемых радиолокационных сигналов, комплекснозначный цифровой отсчет, соответствующий значению суммарного сигнала , поступающего из антенны моноимпульсной РЛС, появляется в частотном фильтре с номером 

Появление отклика, соответствующего суммарному сигналу  , поступающему из антенны моноимпульсной РЛС, в частотном фильтре с номером k=N/2 является также следствием цифрового гетеродинирования сигналов, осуществляемого преобразователем время-частота 10.
, поступающему из антенны моноимпульсной РЛС, в частотном фильтре с номером k=N/2 является также следствием цифрового гетеродинирования сигналов, осуществляемого преобразователем время-частота 10.
Одновременно после БПФ подпачек, накопленных в каждом канале дальности, также, при условии точной компенсации в управляемом формирователе подпачек 9 указанных ранее набегов фазы, комплекснозначный цифровой отсчет, соответствующий значению разностного сигнала  , поступающего из антенны моноимпульсной РЛС, появляется в частотном фильтре с номером k=0
, поступающего из антенны моноимпульсной РЛС, появляется в частотном фильтре с номером k=0
 .
.
В реальных условиях точная компенсация набегов фазы принимаемых радиолокационных сигналов в управляемом формирователе подпачек 9 может отсутствовать, например:
- при наличии ошибки автосопровождения сигнала цели по скорости (в частотной области);
- при наличии разницы доплеровских сдвигов несущей частоты радиолокационных сигналов, отраженных пространственно разнесенными отражателями этих сигналов при осуществлении радиолокационного обзора заданной области земной поверхности.
В этом случае при обработке сигналов, поступающих с выходов моноимпульсной антенны РЛС, в соответствии с заявляемым способом в частотной области, формируемой преобразователем время-частота 10, наблюдается одновременное одинаковое по величине смещение номеров частотных фильтров, соответствующих суммарному и разностному сигналам (относительно значений k=N/2 и k=0).
При наличии нескомпенсированного доплеровского сдвига частоты ΔFd принимаемых радиолокационных сигналов число частотных фильтров, на которые смещаются отклики суммарного и разностного сигналов в частотной области, и направление (знак) смещения с точностью до целого определяется выражением
 ,
,
где:
ΔVr - нескомпенсированное значение радиальной скорости антенны моноимпульсной РЛС относительно визируемого объекта;
Tr - период формирования зондирующих импульсов моноимпульсной РЛС;
λ - длина волны, соответствующая несущей частоте зондирующих сигналов РЛС,
а квадратные скобки соответствуют операции округления до ближайшего целого.
На фиг. 8 а) показано распределение в частотной области абсолютных, нормированных к  , значений
, значений  ,
,  сигналов, полученных после БПФ взвешенной по Хэммингу подпачки значений
сигналов, полученных после БПФ взвешенной по Хэммингу подпачки значений  ,
,  , после точной компенсации указанных выше набегов фазы принимаемых радиолокационных сигналов в управляемом формирователе подпачек 9.
, после точной компенсации указанных выше набегов фазы принимаемых радиолокационных сигналов в управляемом формирователе подпачек 9.
На фиг. 8 б) и фиг. 8 в) показано распределение в частотной области нормированных (к значению  точного случая) абсолютных значений сигналов, полученных также после БПФ подпачки, взвешенной по Хэммингу, при наличии неучтенного доплеровского сдвига несущей частоты принимаемых радиолокационных сигналов, величина которого составляет соответственно +950 Гц и -950 Гц. Время накопления подпачки из 64 отсчетов составляет 15 мс.
точного случая) абсолютных значений сигналов, полученных также после БПФ подпачки, взвешенной по Хэммингу, при наличии неучтенного доплеровского сдвига несущей частоты принимаемых радиолокационных сигналов, величина которого составляет соответственно +950 Гц и -950 Гц. Время накопления подпачки из 64 отсчетов составляет 15 мс.
В том случае, когда период повторения Tr зондирующих импульсов РЛС выбран таким образом, что выполняется условие
 ,
,
где  – ширина полосы возможных доплеровских сдвигов несущих частот радиолокационных сигналов, одновременно принимаемых моноимпульсной РЛС, то указанные смещения номеров частотных фильтров не будут выходить за рамки значений (N/4,…, 3N/4-1) - для суммарного сигнала, а для разностного за рамки значений: (0…, N/4-1) и (3N/4,…, N-1).
– ширина полосы возможных доплеровских сдвигов несущих частот радиолокационных сигналов, одновременно принимаемых моноимпульсной РЛС, то указанные смещения номеров частотных фильтров не будут выходить за рамки значений (N/4,…, 3N/4-1) - для суммарного сигнала, а для разностного за рамки значений: (0…, N/4-1) и (3N/4,…, N-1).
При этом любое обнаружение сигнала в окне частотных фильтров с номерами (N/4,…, 3N/4-1) свидетельствует об обнаружении суммарного сигнала, поступающего с выхода антенны моноимпульсной РЛС.
Пребывание отсчетов сигналов, соответствующих сигналам  , поступающим с суммарного выхода антенны моноимпульсной РЛС, в срединной части образованной БПФ частотной области облегчает организацию процесса автосопровождения объектов радиолокационного наблюдения в этой области.
, поступающим с суммарного выхода антенны моноимпульсной РЛС, в срединной части образованной БПФ частотной области облегчает организацию процесса автосопровождения объектов радиолокационного наблюдения в этой области.
Определение номеров частотных фильтров, комплекснозначные отсчеты которых соответствуют сигналам, поступающим с суммарного выхода антенны моноимпульсной РЛС, может быть осуществлено, например, путем порогового обнаружения сигналов в заданной частотной зоне с формированием соответствующих признаков обнаружения суммарного сигнала
 при
при ,
,
 при
при ,
,
где:
Π - установленный порог обнаружения;
ks - номер частотного фильтра, в котором обнаружен сигнал, соответствующий сигналу, поступающему с суммарного выхода антенны моноимпульсной РЛС.
Если kc - число частотных фильтров, на которое сдвинут обнаруживаемый суммарный сигнал относительно частотного фильтра с номером  и
и  - номер частотного фильтра, в котором зафиксировано обнаружение суммарного сигнала, то номер частотного фильтра
- номер частотного фильтра, в котором зафиксировано обнаружение суммарного сигнала, то номер частотного фильтра  , в котором "находится" соответствующий разностный сигнал, определяется формирователем отсчетов 11 с использованием следующих выражений:
, в котором "находится" соответствующий разностный сигнал, определяется формирователем отсчетов 11 с использованием следующих выражений:
 при
при  ,
,
 при
при  .
.
При радиолокационном картографировании, очевидно, «взаимопривязка» номеров частотных фильтров, соответствующих суммарному и разностному сигналам, может осуществляться без использования процедуры порогового обнаружения для всех частотных фильтров, в которых могут находиться сигналы, поступающие с суммарного выхода антенны моноимпульсной РЛС.
Обнаружение номеров частотных фильтров, соответствующих только суммарным сигналам во всей частотной области, сформированной преобразователем время-частота 10, может быть осуществлено также при прекращении фазовой манипуляции сигналов  , поступающих с разностного выхода антенны моноимпульсной РЛС.
, поступающих с разностного выхода антенны моноимпульсной РЛС.
Результаты формирования отсчетов, в состав которых входят номера частотных фильтров  и соответствующие им в частотной области комплексные значения
и соответствующие им в частотной области комплексные значения  , с выхода формирователя отсчетов 11 поступают на первый вход вычислительно-управляющей системы (ВУС) 13.
, с выхода формирователя отсчетов 11 поступают на первый вход вычислительно-управляющей системы (ВУС) 13.
Этой системой в каждом канале дальности для каждой пары номеров фильтров ks,  , поступившей из формирователя отсчетов 11, определяются величина и знак моноимпульсного отношения
, поступившей из формирователя отсчетов 11, определяются величина и знак моноимпульсного отношения
 ,
,
с использованием которого при известной крутизне пеленгационной характеристики антенны моноимпульсной РЛС определяется пеленг Θ на объект радиолокационного наблюдения в соответствующей плоскости пеленгования.
Как следует из приведенного описания, применение предложенного способа обработки радиолокационных сигналов в моноимпульсной РЛС позволяет:
- за счет использования фазовой манипуляции разностного сигнала, поступающего из моноимпульсной антенны РЛС, избежать существенного влияния нелинейностей амплитудной характеристики приемного канала РЛС на результаты формируемой оценки величины моноимпульсного отношения;
- формировать моноимпульсное отношение на основе оценок абсолютных значений сигналов, поступающих с суммарного и разностного выходов антенны моноимпульсной РЛС, что увеличивает точность оценок углового отклонения линии визирования объекта радиолокационного наблюдения от равносигнального направления антенны моноимпульсной РЛС в условиях воздействия различного рода воздействий, искажающих требуемые фазовые соотношения между суммарным и разностным сигналами, формируемыми антенной моноимпульсной РЛС;
- увеличить чувствительность моноимпульсной РЛС за счет когерентного накопления принимаемых радиолокационных сигналов;
- обеспечить возможность одновременного моноимпульсного пеленгования объектов радиолокационного наблюдения, находящихся на одной и той же дальности от моноимпульсной РЛС, но имеющих различающиеся скорости сближения с РЛС.
Следует также отметить, что обработка радиолокационных сигналов в моноимпульсной РЛС, реализуемая в соответствии с заявляемым способом, осуществляется при использовании в моноимпульсной РЛС одноканального приемного устройства, может быть осуществлена на существующей элементной базе и не требует больших аппаратурных затрат.
Источники информации
1. Патент США US 5402130, опубл. 28.03.1995 г., "Monopulse processor".
2. Samuel М. Sherman, David K. Barton - Monopulse Principles and Techniques, sec. ed., Artech House, 2011.
3. Патент Германии DE 102005060875 A1, опубл. 21.06.2007 г. "Verfahren und Vorrichtung zur Signalverarbeitung bei einer Winkelbestimmung mittels Mikrowellen-Bewegungssensoren".
4. Патент США № 5926128, опубл. 20.07.1999 г., "Radar systems".
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2017 |
|
RU2659807C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| МОНОИМПУЛЬСНАЯ СИСТЕМА СО СВЕРХРЕГЕНЕРАТИВНЫМ ОТВЕТЧИКОМ | 2007 |
|
RU2368916C2 |
| СПОСОБ НАСТРОЙКИ УГЛОВОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2002 |
|
RU2208810C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2015 |
|
RU2606707C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |


Изобретение относится к радиолокационной технике и может быть использовано в моноимпульсных радиолокационных станциях (РЛС). Достигаемый технический результат - повышение точности и расширение функциональных возможностей моноимпульсного пеленгования при использовании одноканального приемного устройства моноимпульсной РЛС. Указанный результат достигается с использованием череспериодной фазовой манипуляции сигнала, поступающего с разностного выхода антенны моноимпульсной РЛС, векторного сложения этого фазоманипулированного сигнала с сигналом, поступающим с суммарного выхода антенны моноимпульсной РЛС, переноса результирующего сигнала на промежуточную частоту, его одноканального усиления, синхронного детектирования, аналого-цифрового преобразования, когерентного подпачечного накопления оцифрованных значений результирующего сигнала, компенсации доплеровских набегов фаз этого сигнала за время накопления подпачки, время-частотного преобразования накопленных значений результирующего сигнала, выделения суммарных и разностных сигналов в частотной области, определения их абсолютных значений и последующего вычисления соответствующих моноимпульсных отношений с учетом фазовых соотношений выделенных сигналов. 8 ил.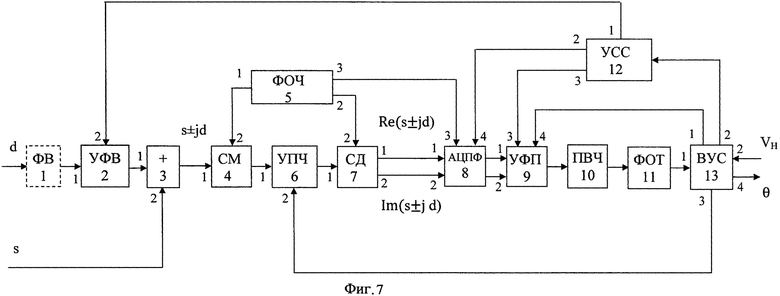
Способ обработки радиолокационных сигналов в моноимпульсной РЛС, в процессе реализации которого осуществляется череспериодная (от зондирования к зондированию) фазовая манипуляция принимаемых разностных сигналов, поступающих с разностного выхода моноимпульсной антенны РЛС, векторное сложение принимаемых фазоманипулированных через период зондирования разностных сигналов с принимаемыми суммарными сигналами, поступающими с суммарного выхода моноимпульсной антенны РЛС, перенос результирующей векторной суммы сигналов на промежуточную частоту, ее одноканальное усиление на промежуточной частоте, синхронное детектирование, аналого-цифровое преобразование вещественных и мнимых частей усиленных и продетектированных результирующих сигналов и последующая цифровая согласованная фильтрация этих сигналов, в случае использования в РЛС зондирующих импульсов с внутриимпульсной модуляцией, при этом моменты реализации аналого-цифрового преобразования соответствуют формируемым каналам обнаружения объектов радиолокационного наблюдения по дальности, отличающийся тем, что после аналого-цифрового преобразования осуществляются: когерентное накопление в каждом канале дальности оцифрованных результатов векторного сложения суммарного и фазоманипулированного разностного сигналов, полученных в интервалах приема в соседних зондированиях, с образованием подпачек этих значений, корректировка значений аргументов накопленных в подпачках комплексных величин в каждом канале дальности с учетом ожидаемых доплеровских набегов фазы принимаемых радиолокационных сигналов за время накопления подпачек, цифровое гетеродинирование в каждом канале дальности цифровых сигналов, накопленных в подпачках, обеспечивающее последующий сдвиг цифровых отсчетов суммарных сигналов в середину анализируемой частотной области, оконное взвешивание в каждом канале дальности значений накопленных подпачек, быстрое преобразование Фурье (БПФ) этих взвешенных значений, определение в каждом канале дальности номеров частотных фильтров, соответствующих суммарным сигналам и разностным сигналам, сопоставляемым частотным фильтрам, в которых присутствуют суммарные сигналы, вычисление абсолютных значений суммарных и соответствующих им разностных сигналов, а также абсолютных значений соответствующих моноимпульсных отношений, определение знаков вычисленных моноимпульсных отношений, соответствующих направлениям отклонения линий визирования объектов радиолокационного наблюдения от равносигнального направления антенны моноимпульсной РЛС в рассматриваемой плоскости пеленгования.
| US 5926128 A, 20.07.1999 | |||
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| МОНОИМПУЛЬСНАЯ РЛС МИЛЛИМЕТРОВОГО ДИАПАЗОНА | 2015 |
|
RU2600109C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| JP 2011191100 A, 29.09.2011 | |||
| US 8269665 B1, 18.09.2012 | |||
| US 8004453 B1, 23.08.2011. | |||

