Настоящее изобретение относится к радиотехнике и может быть использовано в радиолокационных приемниках сигналов для подавления пассивных помех переменной интенсивности, например, от морской поверхности.
Пассивные помехи от морской поверхности при высокой разрешающей способности радиолокационной станции представляют собой совокупность импульсов, флюктуирующих независимо друг от друга по случайному закону, причем максимум их значительно (на 70÷100 дБ) превышает уровень внутренних шумов. Интенсивность сигналов от малоразмерных целей (например, низколетящих крылатых ракет) значительно меньше интенсивности помех, что затрудняет их обнаружение на фоне этих помех, в частности, с использованием методов селекции движущихся целей и накопления сигналов, из-за ограниченного динамического диапазона устройств обнаружения сигналов целей и помех переменной интенсивности. Для применения этих методов обнаружения сигналов целей необходимо подавить (пронормировать) помехи до уровня внутренних шумов приемника.
Для подавления (нормировки) пассивных помех переменной интенсивности используется устройство автоматической регулировки усиления (АРУ) радиолокационных приемников [1], содержащее аттенюатор (например, регулируемый усилитель) и последовательно соединенные детектор, усилитель и фильтр. Выход аттенюатора подключен ко входу детектора, а выход фильтра - к управляющему входу аттенюатора. Принимаемый сигнал проходит через аттенюатор, детектируется детектором, усиливается в усилителе и поступает в фильтр, на выходе которого формируется управляющее напряжение. Это напряжение поступает на управляющий вход аттенюатора, коэффициент передачи которого уменьшается при увеличении управляющего напряжения. Величина сигнала на выходе аттенюатора уменьшается до необходимого уровня.
Недостаток этого устройства АРУ приемника заключается в его малом быстродействии. В этом устройстве для того чтобы не происходило подавление сигналов цели, быстродействие ограничивается постоянной времени фильтра, которая выбирается большей длительности зондирующего импульса. Однако при высокой разрешающей способности радиолокационной станции длительность импульсов, пассивных помех, например, от морской поверхности, равна длительности зондирующего импульса, и в известном устройстве АРУ подавление этих помех будет небольшим.
Дли подавления помех от морской поверхности используется также устройство временной регулировки усиления (ВРУ) радиолокационного приемника [2], которое состоит из регулируемого усилителя и формирователя импульса ВРУ, выход которого соединен с управляющим входом регулируемого усилителя. На вход формирователя импульса ВРУ поступает импульс запуска, совпадающий с зондирующим импульсом радиолокационной станции. В формирователе импульса ВРУ формируется управляющий импульс определенной формы, который с выхода формирователя импульса ВРУ поступает на управляющий вход регулируемого усилителя, изменяя его усиление обратно пропорционально ожидаемому закону измерения интенсивности помех во времени, поступающих в это же время на выход регулируемого усилителя. На выходе его амплитуда пассивных помех поддерживается постоянной.
Недостатком известного устройства с ВРУ является то, что при высокой разрешающей способности радиолокационной станции одновременно с импульсами пассивных помех происходит подавление в такой же степени находящихся между ними сигналов целей. При этом уменьшается вероятность правильного обнаружения сигналов малоразмерных целей, амплитуда которых меньше максимальной амплитуды пассивных помех на данном участке дальности.
Наиболее близким устройством к предлагаемому по технической сущности и выбранным в качестве прототипа является устройство АРУ радиолокационного приемника [3], содержащее регулируемый усилитель, детектор, строб-каскад, ограничитель, фильтр (интегратор), каскад задержки, пиковый детектор (запоминающее устройство), модулятор, соединенные последовательно, а также сумматор, фильтр нижних частот и синхронизатор, выходы которого подключены ко входу модулятора и к управляющему входу строб-каскада. Один вход сумматора соединен с выходом детектора, другой - с выходом модулятора. Выход сумматора через фильтр нижних частот подключен к управляющему входу регулируемого усилителя.
Принимаемые сигналы поступают на вход регулируемого усилителя, в котором они усиливаются. С выхода регулируемого усилителя эти сигналы поступают в детектор, на выходе которого выделяются видеосигналы. В строб-каскаде, отпираемом импульсом, поступающим с синхронизатора, выделяются видеосигналы, с малой дальности, на которой помехи максимальны. Эти видеосигналы поступают в последовательно соединенные ограничитель и фильтр (интегратор), образующие схему "широкая полоса-ограничение-узкая полоса" (ШОУ). В этой схеме происходит подавление мощности сигналов цели и выделение помех от морской поверхности. В каскаде задержки помехи ограничиваются по амплитуде снизу и поступают на пик-детектор (запоминающее устройство), в котором производится запоминание их на несколько периодов повторения. Напряжение с выхода запоминающего устройства поступает в модулятор, в котором этим напряжением модулируется по амплитуде импульс, поступающий из синхронизатора и следующий непосредственно после зондирующего импульса. В сумматоре производится суммирование видеосигналов и импульсов модулятора, поступающих на его входы с выходов соответственно детектора и модулятора. С выхода сумматора суммарный сигнал поступает на фильтр нижних частот, на выходе которого выделяется управляющее напряжение, которое передается на управляющий вход регулируемого усилители, изменяя его коэффициент передачи обратно пропорционально интенсивности помех от морской поверхности. При этом импульс модулятора обеспечивает быстрый заряд конденсатора фильтра нижних частот и соответственно быстрое запирание регулируемого усилителя на малой дальности (сразу после излучения зондирующего импульса), на которой резко возрастает интенсивность помех от морской поверхности. Постоянная времени фильтра нижних частот больше длительности зондирующего импульса.
Недостатком известного устройства является малое быстродействие при малой вероятности правильного обнаружения. Напряжение на выходе запоминающего устройства (пикового детектора) формируется путем интегрирования сигналов с выхода каскада задержки за несколько периодов повторения, поэтому быстродействие малое и при нестационарной помехе от морской поверхности (средняя интенсивность которой изменяется, например, при сканировании луча радиолокационной станции по азимуту) полного подавления помех до уровня внутренних шумов приемника в предлагаемом устройстве не будет. Быстродействие ограничивается также постоянной времени фильтра нижних частот, которая для того чтобы не происходило подавления мощных сигналов цели до уровня внутренних шумов, выбирается больше длительности зондирующего сигнала. В известном устройстве одновременно с сигналами помех происходит подавление в такой же степени слабых сигналов малоразмерных целей (например, низколетящих крылатых ракет), находящихся между импульсами помехи, до уровня, значительно ниже уровня внутренних шумов приемника. Это приводит к малой вероятности правильного обнаружения этих сигналов в последующих устройствах обнаружения.
Целью изобретения является повышение быстродействия при увеличении вероятности правильного обнаружения.
Эта цель в предлагаемом устройстве достигается тем, что в устройство АРУ радиолокационного приемника, содержащее регулируемый усилитель, детектор, строб-каскад, ограничитель, соединенные последовательно, интегратор, запоминающее устройство, соединенные последовательно, и, синхронизатор, выход которого подключен к управляющему входу строб-каскада, введены блок запрета, блок сравнения, дополнительный регулируемый усилитель, формирователь напряжения сравнения и регулируемый аттенюатор, вход которого подключен к выходу ограничителя, выход - ко входу интегратора. Один вход блока запрета соединен с выходом детектора и входом дополнительного регулируемого усилителя, другой вход - с выходом блока сравнения, а выход - с управляющими входами регулируемых усилителей. Один вход блока сравнения соединен с выходом дополнительного регулируемого усилителя, и управляющим входом регулируемого аттенюатора, другой вход - с выходом формирователя напряжения сравнения, управляющий вход которого подключен к выходу запоминающего устройства. Выходы синхронизатора подключены ко входу формирователя напряжения сравнения и к управляющим входам запоминающего устройства и интегратора.
Введение в устройство блока запрета, блока сравнения, дополнительного регулируемого усилителя, формирователя напряжения сравнения и регулируемого аттенюатора, включенных описанным выше способом, обеспечивает формирование в цепи, образованной строб-каскадом, ограничителем, регулируемым аттенюатором и интегратором, точной оценки среднего значения интенсивности помех за один период повторения, по которому в формирователе напряжения сравнения формируется напряжение сравнения, изменяющееся во времени в соответствии с изменением помех в предыдущем периоде повторения; выделение в цепи, образованной блоками сравнения и запрета, помех, поступающих на управляющий вход регулируемого усилителя. Это обеспечивает повышение быстродействия устройства до длительности зондирующего импульса. При этом амплитуда мощных сигналов целей не уменьшается, а амплитуда слабых сигналов малоразмерных целей уменьшается до величины не ниже уровня внутренних шумов приемника, благодаря чему повышается вероятность правильного обнаружения.
Предлагаемое устройство поясняется чертежами, где:
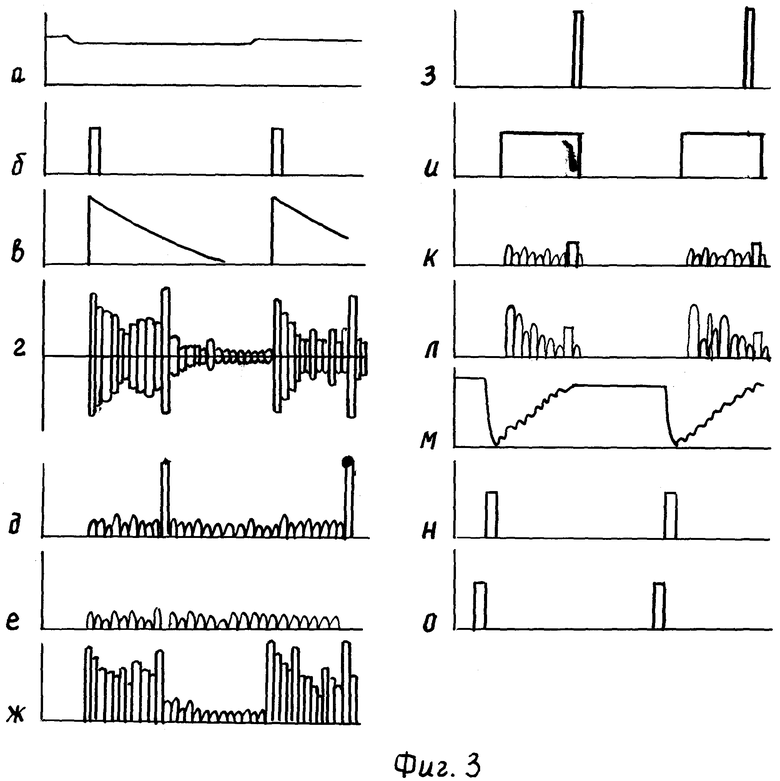
- на фиг.1 приведена блок-схема предлагаемого устройства;
- на фиг.2 приведены амплитудные характеристики предлагаемого устройства;
- на фиг.3 приведены формы напряжений в разных точках блок-схемы фиг.1.
Устройство автоматической регулировки усиления радиолокационного приемника (фиг.1) содержит регулируемый усилитель 1, детектор 2, строб-каскад 3, ограничитель 4, регулируемый аттенюатор 5, интегратор 6, запоминающее устройство 7, соединенные последовательно, формирователь 8 напряжения сравнения, блок 9 запрета, блок 10 сравнения, дополнительный регулируемый усилитель 11, синхронизатор 12.
Один вход блока 9 запрета соединен с выходом детектора 2 и входом регулируемого усилителя 11, второй вход - с выходом блока 10 сравнения, выход - с управляющими входами регулируемых усилителей 1, 11. Один вход блока 10 сравнения соединен с выходом формирователя 8 напряжения сравнения, второй вход - с выходом регулируемого усилителя 11 и управляющим входом регулируемого аттенюатора 5. Выходы синхронизатора 12 соединены со входом формирователя 8 напряжения сравнения и с управляющими входами запоминающего устройства 7, интегратора 6, и строб-каскада 3. Выход запоминающего устройства 7 соединен с управляющим входом формирователя 8 напряжения сравнения.
Регулируемый усилитель 1, детектор 2 и блок 9 запрета образуют схему быстродействующей АРУ с постоянной времени, меньшей длительности зондирующего сигнала, и амплитудной характеристикой, приведенной на фиг.2, что обеспечивается соответствующим выбором параметров детектора 2 и блока 9 запрета.
В результате обработки помех, принятых в предыдущем периоде повторения, в запоминающем устройстве 7 была запомнена оценка среднего значения помехи. Напряжение, пропорциональное этому значению, поступает с выхода запоминающего устройства 7 (фиг.3,а) на управляющий вход формирователя 8 напряжения сравнения, на вход которого от синхронизатора 12 поступает импульс, совпадающий с зондирующим импульсом (фиг.3,б). Из этого импульса в формирователе 8 напряжения сравнения формируется напряжение сравнения (фиг.3,в), форма которого соответствует форме огибающей помех от морской поверхности. Это напряжение сравнения поступает на второй вход блока 10 сравнения. В это же время на вход регулируемого усилителя 1 поступает смесь сигналов целей, помех от морской поверхности и внутренних шумов приемника (фиг.3,г.). В цепи быстродействующей АРУ, образованной регулируемым усилителем 1, детектором 2 и нормально открытым блоком 9 запрета, осуществляется нормирование (подавление) помех и сигналов малоразмерных целей, уровень которых не превышает уровня помех. В результате на выходе детектора 2 выделяются видеосигналы, в которых сигналы малоразмерных целей и помехи подавлены до уровня внутренних шумов приемника (фиг.3,д). Эти видеосигналы поступают на вход регулируемого усилителя 11, на управляющий вход которого поступают сигналы с выхода блока 9 запрета (фиг.3,е). Коэффициент усиления регулируемого усилителя 11 под действием сигналов с выхода блока 9 запрета изменяется обратно пропорционально коэффициенту передачи регулируемого усилителя 1. На выходе регулируемого усилителя 11 выделяются сигналы, амплитуда которых пропорциональна амплитуде входных сигналов (фиг.3,ж). Эти сигналы поступают на первый вход блока 10 сравнения. Помехи и сигналы малоразмерных целей, амплитуда которых меньше напряжения сравнения, через блок 10 сравнения не проходят; на его выходе выделяются мощные сигналы от крупных целей (фиг.3,з). Эти сигналы поступают на управляющий вход блока 9 запрета, запирая его на время прохождения мощных сигналов целей. При этом обратная связь в схеме быстродействующей АРУ прерывается, и эти сигналы переходят через регулируемый усилитель и детектор с максимальным усилением (фиг.3,д), то есть без подавления.
В течение рассматриваемого периода повторения сигналы с выхода детектора 2 (фиг.3,д) поступают на вход нормально закрытого строб-каскада 3, который отпирается импульсом синхронизатора 12 (фиг.3,и) на время, прохождения наиболее интенсивных помех. Эти сигналы ограничиваются сверху в ограничителе 4 на уровне, соответствующем максимальной амплитуде помех с учетом ее возможного изменения от периода повторения к периоду (фиг.3,к), и поступают на вход регулируемого аттенюатора 5. Под действием сигналов, поступающих с выхода дополнительного регулируемого усилителя 11 (фиг.3,ж), коэффициент передачи регулируемого аттенюатора 5 изменяется обратно пропорционально коэффициенту передачи регулируемого усилителя 1. На выходе регулируемого аттенюатора 5 выделяются сигналы помехи, амплитуда которых пропорциональна амплитуде помех на входе устройства, и подавленные сигналы целей (фиг.3,л). Эти сигналы поступают на вход интегратора 6, в котором путем интегрирования входных сигналов осуществляется оценка среднего значения помех в данном периоде повторения (фиг.3,м). В конце этого периода повторения под действием сигналов синхронизатора 12, поступающих на управляющие входы запоминающего устройства 7 (фиг.3,н) и интегратора 6 (фиг.3,о) в запоминающем устройстве 7 запоминается вычисленное среднее значение помехи (фиг.3,а), поступающее на него с выхода интегратора 6, а на интеграторе 6 напряжение уменьшается до нуля (фиг.3,м).
В следующем периоде повторения по среднему значению помех от морской поверхности, вычисленному в данном периоде повторения, и связанном определенной зависимостью с изменением их интенсивности по дальности, в формирователе 8 напряжения сравнения формируется напряжение сравнения (фиг.3,в). Так как помехи от периода к периоду повторения меняются незначительно, то форма напряжения сравнения будет соответствовать форме огибающей помех с небольшой погрешностью. При этом с постепенным изменением интенсивности помех, например, при сканировании луча радиолокационной станции по азимуту, соответственно будет изменяться напряжение сравнения, и подавление помех по-прежнему будет осуществляться до уровня внутренних шумов.
Благодаря уменьшению постоянной времени схемы быстродействующей АРУ до значения, меньшего длительности зондирующего сигнала, увеличилось быстродействие устройства при обработке сигналов и помех внутри данного периода повторения. Благодаря вычислению среднего значения помех в течение одного периода повторения и формированию по этому значению напряжения сравнения в течение следующего периода повторения увеличилось быстродействие устройства от периода к периоду повторения, что обеспечивает более точное подавление помех до уровня внутренних шумов при изменении их интенсивности, происходящей вследствие сканирования луча антенны РЛС по азимуту и из-за изменения волнения моря.
При этом мощные сигналы целей в устройстве не подавляются, а слабые сигналы малоразмерных целей, находящиеся между импульсами помехи, подавляются до значения не ниже уровня внутренних шумов приемника. Это повышает вероятность правильного обнаружения сигналов целей при дальнейшей обработке сигналов в приемнике (например, методами накопления или селекции движущихся целей). Так как морская поверхность находится в движении, а большинство подлежащих обнаружению целей перемещаются в пространстве (например, самолеты и крылатые ракеты, летящие на малой высоте над морской поверхностью), то в течение всего времени накопления малоразмерных целей в зоне обнаружения радиолокационной станции их слабые сигналы занимают различное положение относительно импульсов помехи (то совпадая, то не совпадая с ними). В процессе радиолокационного наблюдения за обстановкой применение предлагаемого устройства, дает возможность увеличить вероятность правильного обнаружения слабых сигналов малоразмерных целей в те интервалы времени, когда эти сигналы находятся между импульсами помехи, так как эти сигналы подавляются до значения, не ниже уровня внутренних шумов.
При фиксированной вероятности правильного обнаружения и ложных тревог величина минимального сигнала цели, обнаруживаемого приемником в зоне действия помех от морской поверхности, повышается при применении предлагаемого устройства приблизительно во столько раз, во сколько интенсивность помех в этой зоне превышает интенсивность внутренних шумов приемника.
Источники информации
1. Защита от радиопомех. Под. ред. М.В. Максимова. М., «Светское радио», 1976 г., стр. 197-213.
2. Лукошкин А.П. Радиолокационные усилители с большим диапазоном входных сигналов, изд. "Сов. радио", 1964 г., стр.17-20, 221-223.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство временной автоматической регулировки усиления | 1976 |
|
SU1841234A1 |
| СТАНЦИЯ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ И ПОДАВЛЕНИЯ | 1998 |
|
RU2150178C1 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1980 |
|
SU1840991A1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО | 2004 |
|
RU2256938C1 |
| РАДИОЛОКАЦИОННЫЙ ПРИЕМНИК С АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКОЙ УСИЛЕНИЯ | 1977 |
|
SU1840881A1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1979 |
|
SU1840912A1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ ОТ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2237906C2 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1841008A1 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2012 |
|
RU2531562C2 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЕНСАТОР | 1986 |
|
SU1841000A1 |

Изобретение может быть использовано в радиолокационных приемниках для подавления пассивных помех переменной интенсивности. Достигаемый технический результат - повышение быстродействия при увеличении вероятности правильного обнаружения. Указанный результат достигается за счет того, что устройство автоматической регулировки усиления радиолокационного приемника содержит соединенные последовательно регулируемый усилитель (РУ), детектор, устройство стробирования, ограничитель, и, соединенные последовательно интегратор и запоминающее устройство, содержит также второй РУ, регулируемый аттенюатор (РА) и, соединенные последовательно формирователь напряжения сравнения (ФНС), элемент сравнения и элемент запрета, при этом вход второго РУ соединен с управляющим входом элемента запрета и подключен к выходу детектора, управляющий вход соединен с управляющим входом первого РУ и подключен к выходу элемента запрета, а выход соединен с вторым входом элемента сравнения и управляющим входом РА, включенного между ограничителем и интегратором, вход ФНС подключен к выходу запоминающего устройства. 3 ил.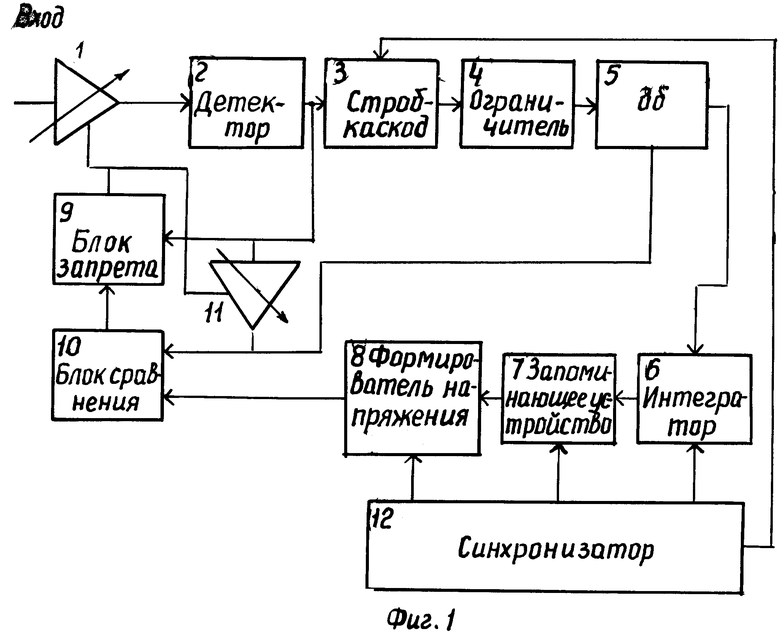
Устройство для автоматической регулировки усиления радиолокационного приемника, содержащее соединенные последовательно, регулируемый усилитель, детектор, устройство стробирования, ограничитель и, соединенные последовательно, интегратор и запоминающее устройство, отличающееся тем, что, с целью повышения точности и быстродействия регулировки, в него введены второй регулируемый усилитель, регулируемый аттенюатор и, соединенные последовательно, формирователь напряжения сравнения, элемент сравнения и элемент запрета, при этом вход второго регулируемого усилителя соединен с управляющим входом элемента запрета и подключен к выходу детектора, управляющий вход соединен с управляющим входом первого регулируемого усилителя и подключен к выходу элемента запрета, а выход соединен со вторым входом элемента сравнения и управляющим входом регулируемого аттенюатора, включенного между ограничителем и интегратором, вход формирователя напряжения сравнения подключен к выходу запоминающего устройства.
| Лукошкин А.П | |||
| Радиолокационные усилители с большим диапазоном входных сигналов, изд | |||
| "Сов | |||
| радио", 1964, стр.17-20, 221-223. |

