Предлагаемое устройство временной автоматической регулировки усиления (ВАРУ) относится к радиолокационной технике и может быть использовано в приемниках морских РЛС.
Известные устройства ВАРУ радиолокационных приемников содержат аттенюатор и формирователь импульса ВАРУ и сводятся, например, к устройству ВАРУ (Лукошкин А.П., Радиолокационные усилители с большим диапазоном входных сигналов. М., "Сов. Радио", 1964, стр. 221-224), выбранному в качестве прототипа и содержащему аттенюатор и формирователь импульса ВАРУ, выход которого соединен с управляющим входом аттенюатора, а вход является входом импульса запуска. В состав прототипа введены усилитель и детектор приемника, так как они участвуют в работе предлагаемого устройства. Усилитель и детектор соединены последовательно и включены на выходе аттенюатора.
После поступления импульса запуска, совпадающего с зондирующим сигналом, в формирователе импульса ВАРУ формируется импульс ВАРУ, поступающий с выхода формирователя импульса ВАРУ на управляющий вход аттенюатора. Под воздействием этого импульса коэффициент передачи аттенюатора изменяется во времени таким образом, чтобы подавить помехи от морской поверхности до уровня внутренних шумов приемника.
Форма импульса ВАРУ (его длительность и амплитуда) устанавливается оператором в процессе работы таким образом, чтобы засветка экрана индикатора сигналами помех от морской поверхности и внутренних шумов была одинаковой.
Недостатком известного устройства является то, что оно обеспечивает малые помехозащищенность и чувствительность приемника. Помехи от морской поверхности изменяются не только по дальности, но и в зависимости от азимутального направления излучения антенны РЛС по отношению к фронту морских волн: на направлениях излучения навстречу движению морских волн интенсивность этих помех максимальна; на направлениях излучения по движению морских волн их интенсивность меньше максимальной примерно на 6 дБ, а на направлениях вдоль гребней морских волн меньше максимальной примерно на 20 дБ. В известном устройстве ВАРУ усиление приемника во времени увеличивается с увеличением дальности по определенному закону, но постоянно с изменением азимутального направления. При этом интенсивность помех, проходящих с разных азимутальных направлений, неодинакова, и равномерное подавление их до уровня внутренних шумов невозможно: на некоторых направлениях интенсивность помех после устройства ВАРУ выше интенсивности внутренних шумов, что ухудшает помехозащищенность РЛС (возрастает вероятность ложных тревог); на других направлениях устройство ВАРУ подавляет помехи от морской поверхности, а вместе с ними и слабые сигналы цели, ниже уровня внутренних шумов, что снижает чувствительность приемника (понижается вероятность правильного обнаружения). В известном устройстве поэтому невозможно обеспечить одновременно максимальную чувствительность и помехозащищенность на всех азимутальных направлениях.
Целью предлагаемого устройства является повышение помехозащищенности и чувствительности приемника РЛС.
Эта цель в предлагаемом изобретении достигается тем, что в устройство ВАРУ, содержащее аттенюатор, усилитель, детектор и формирователь импульса ВАРУ, введены дополнительный аттенюатор, интегратор, блок памяти и синхронизатор. Дополнительный аттенюатор, интегратор и блок памяти включены последовательно. Вход дополнительного аттенюатора соединен с выходом детектора, а выход блока памяти - с управляющим входом формирователя импульса ВАРУ, у которого выход соединен с управляющим входом дополнительного аттенюатора, а вход - со входом синхронизатора. Выходы синхронизатора соединены с управляющими входами блока памяти и интегратора. В устройство ВАРУ могут быть введены также ограничитель и ключевая схема, соединенные последовательно и включенные в цепь связи детектора с дополнительным аттенюатором. В качестве формирователя импульса ВАРУ целесообразно использовать устройство, у которого в качестве источника постоянного напряжения используется выход блока памяти.
Наличие блока памяти, в котором запоминается среднее значение помех от морской поверхности за предыдущий период повторения, обеспечивает формирование в формирователе импульса ВАРУ под действием напряжения, поступающего с выхода блока памяти, импульса ВАРУ, соответствующего интенсивности помех, поступающих с данного азимутального направления, и закону их изменения по дальности. В цепи, образованной дополнительным аттенюатором и интегратором, вырабатывается среднее значение помех от морской поверхности посредством того, что в дополнительном аттенюаторе, коэффициент передачи которого под действием импульса ВАРУ, поступающего с выхода формирователя импульса ВАРУ на управляющий вход дополнительного аттенюатора, меняется обратно пропорционально коэффициенту передачи аттенюатора, из сигналов помехи, поступающих с выхода детектора, формируются сигналы, форма которых соответствует огибающей сигналов помех, действующих на входе аттенюатора; затем эти сигналы интегрируются (усредняются) в интеграторе. Ограничитель и ключевая схема обеспечивает дополнительную селекцию помех от морской поверхности по амплитуде и дальности от сигналов цели. Синхронизатор, запускаемый импульсом запуска, вырабатывает импульсы, поступающие на управляющие входы блока памяти, интегратора и ключевой схемы и обеспечивающие их работу в определенной последовательности. В частности, синхронизатор обеспечивает в течение данного периода повторения после окончания действия помех от морской поверхности запись их среднего значения с выхода интегратора в блок памяти. В соответствии с величиной этого среднего значения в последующий период повторения в формирователе импульса ВАРУ формируется импульс ВАРУ формы, соответствующей интенсивности и закону изменения по дальности помех от морской поверхности. Так как от периода к периоду повторения характеристики помех от морской поверхности меняются незначительно, то в последующий период повторения в аттенюаторе под действием импульса ВАРУ производится подавление помех от морской поверхности, поступающих с данного азимутального направления, до уровня внутренних шумов приемника. Предлагаемое устройство ВАРУ обеспечивает такое подавление помех от морской поверхности, поступающих с любого азимутального направления. Это дает возможность улучшить помехозащищенность РЛС и повысить чувствительность ее приемника.
В качестве формирователя импульса ВАРУ в предлагаемом устройстве могут быть использованы устройства, которые обеспечивают формирование на своем выходе импульса ВАРУ, форма которого соответствует закону изменения помех по дальности и регулируется напряжением, поступающим с входящего в их состав блока постоянного напряжения. При использовании их в предлагаемом устройстве блоком постоянного напряжения является выход блока памяти.
Предлагаемое устройство поясняется чертежами, где:
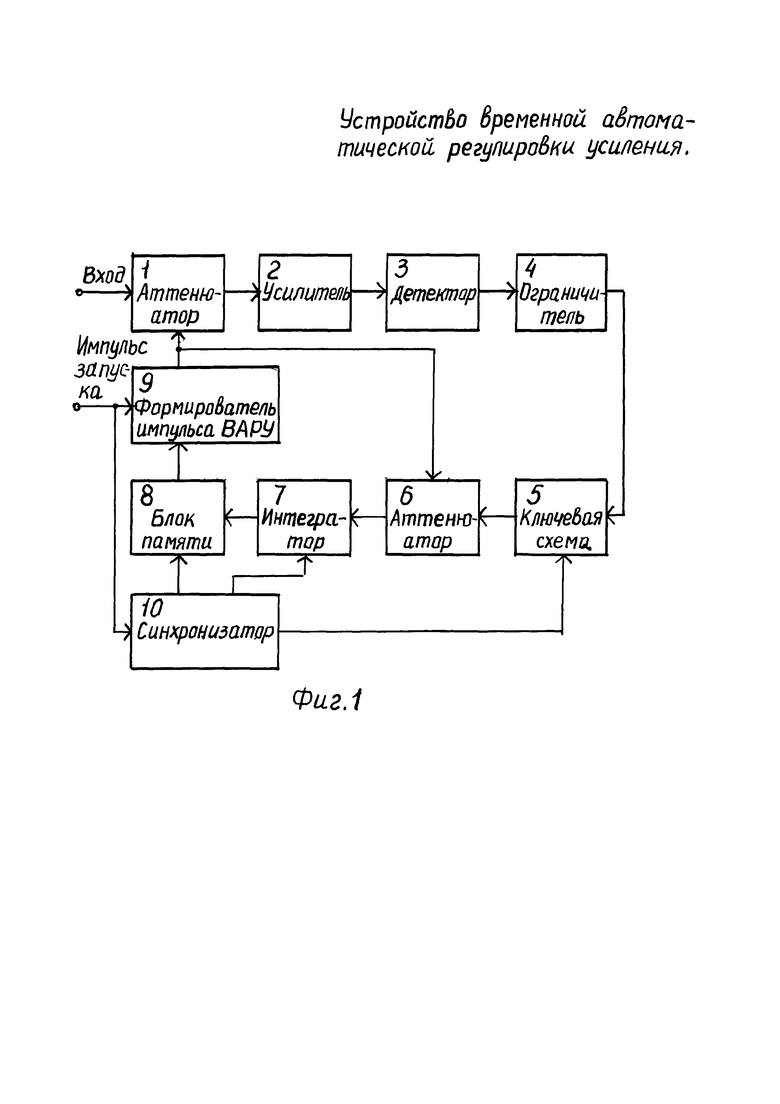
- на фиг. 1 приведена блок-схема предлагаемого устройства;
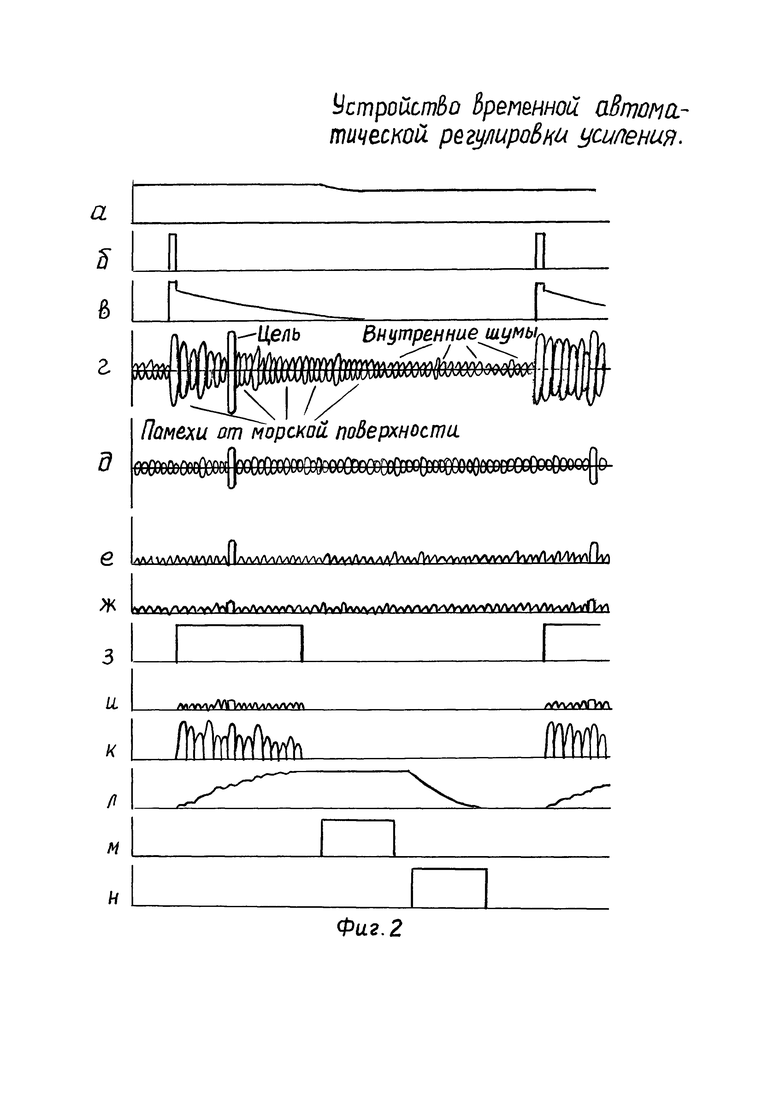
- на фиг. 2 приведены формы напряжений в разных точках блок-схемы фиг. 1.
Устройство ВАРУ (фиг. 1) содержит аттенюатор 1, усилитель 2, детектор 3, ограничитель 4, ключевую схему 5, дополнительный аттенюатор 6, интегратор 7 и блок 8 памяти, соединенные последовательно, а также формирователь 9 импульса ВАРУ и синхронизатор 10. Выход формирователя 9 импульса ВАРУ соединен с управляющими входами аттенюатора 1 и дополнительного аттенюатора 6. Соединенные вместе входы формирователя 9 импульса ВАРУ и синхронизатора 10 являются входом импульса запуска. Выходы синхронизатора 10 соединены с управляющими входами блока 8 памяти, интегратора 7 и ключевой схемы 5. Детектор 3 является либо детектором приемника, либо дополнительным детектором. Соответственно выходом устройства ВАРУ является либо выход детектора 3, либо выход усилителя 2. В качестве формирователя 9 импульса ВАРУ могут быть, например, использованы устройства, в которых в качестве источника постоянного напряжения используется выход блока 8 памяти.
После предыдущего периода повторения в блоке 8 памяти было запомнено среднее значение помех от морской поверхности. Напряжение с выхода блока 8 памяти (фиг. 2,а) поступает на управляющий вход формирователя 9 импульса ВАРУ. При поступлении импульса запуска (фиг. 2,б), передний фронт которого опережает передний фронт зондирующего сигнала РЛС, а задний фронт совпадает с задним фронтом зондирующего сигнала, на вход формирователя 9 импульса ВАРУ на его выходе формируется импульс ВАРУ (фиг. 2,в). Форма этого импульса определяется величиной напряжения на выходе блока 8 памяти и соответствует интенсивности и закону изменения помех от морской поверхности. После окончания импульса запуска на вход аттенюатора 1 поступают помехи от морской поверхности, среди которых может находиться сигнал цели, и внутренний шум приемника (фиг. 2,г). Помехи от морской поверхности действуют на малых дальностях (в начале периода повторения). Импульс ВАРУ поступает на управляющий вход аттенюатора 1 и изменяет его коэффициент передачи обратно пропорционально закону изменения помехи от морской поверхности. На выходе аттенюатора 1 помехи от морской поверхности подавлены до уровня внутренних шумов приемника (фиг. 2,д), однако отношение сигнал/помеха остается таким же, как и на входе аттенюатора 1. Сигналы с выхода аттенюатора 1 усиливаются усилителем 2 и детектируются в детекторе 3, с выхода которого (фиг. 2,е) они поступают в ограничитель 4. Уровень ограничения у него равен максимально возможному уровню подавленных помех от морской поверхности с учетом возможного изменения этих помех от одного периода повторения к другому. Сигналы помех от морской поверхности проходят через ограничитель 4 без искажений, а мощные сигналы целей ограничиваются. Сигналы с выхода ограничителя 4 (фиг. 2,ж) поступают на вход ключевой схемы 5, которая в исходном состоянии закрыта. Под действием импульса запуска, поступающего на вход синхронизатора 10, в нем вырабатывается первый импульс, соответствующий той части периода повторения, в которой действуют помехи от морской поверхности (фиг. 2,з). Этот импульс поступает на управляющий вход ключевой схемы 5, открывая ее для прохождения на ее выход сигналов помех от морской поверхности (фиг. 2,и). Эти сигналы поступают в дополнительный аттенюатор 6, на управляющий вход которого одновременно с выхода формирователя 9 импульса ВАРУ приходит импульс ВАРУ (фиг. 2,в). Под действием этого импульса коэффициент передачи дополнительного аттенюатора 6 меняется обратно пропорционально коэффициенту передачи аттенюатора 1. На выходе дополнительного аттенюатора 6 выделяются сигналы помех от морской поверхности (фиг. 2,к), амплитуда которых пропорциональна амплитуде сигналов этих помех на входе аттенюатора 1. Эти сигналы помех от морской поверхности поступают в интегратор 7 (напряжение на котором в исходном состоянии равно 0) и суммируются в нем (фиг. 2,л). В результате в интеграторе 7 выделяется напряжение, пропорциональное среднему значению помех от морской поверхности. После окончания первого импульса синхронизатор 10 вырабатывает второй импульс (фиг. 2,м), который с его выхода поступает на управляющий вход блока 8 памяти, обеспечивая в нем запись среднего значения помех от морской поверхности (принимаемых в данный период повторения), поступающего с выхода интегратора 7 на вход блока 8 памяти (фиг. 2,а). После окончания второго импульса в синхронизаторе 10 формируется третий импульс (фиг. 2,н), который поступает на управляющий вход интегратора 7, уменьшая напряжение на нем до нуля. При поступлении импульса запуска следующего периода повторения (фиг. 2,б) в формирователе 9 импульса ВАРУ формируется импульс ВАРУ, форма которого определяется напряжением, пропорциональным среднему значению помех от морской поверхности за данный период повторения. Цикл работы повторяется.
Так как помехи от морской поверхности от периода к периоду меняются незначительно, то погрешность в определении среднего значения также небольшая, и в предлагаемом устройстве ВАРУ осуществляется подавление помех от морской поверхности до уровня внутренних шумов приемника на всех азимутальных направлениях. Если вместе с сигналами помех от морской поверхности принимается мощный сигнал цели, то он поступает в интегратор 7 после ограничения в ограничителе 4, благодаря чему вносимая им погрешность в определение среднего значения помех небольшая.
Ограничитель 4 и ключевая схема 5 могут отсутствовать. При этом увеличится влияние сигналов целей на определение среднего значения помех в интеграторе 7. Так как обычно с данного азимутального направления принимаются сигналы от малого числа целей, то эта погрешность мала.
В предлагаемом устройстве ВАРУ для каждого азимутального направления производится подавление помех от морской поверхности до уровня внутренних шумов приемника. Поэтому на каждом азимутальном направлении приемник имеет максимальные чувствительность и помехозащищенность. Благодаря этапу повышается помехозащищенность и чувствительность ее приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ РАДИОЛОКАЦИОННОГО ПРИЕМНИКА | 1978 |
|
SU1840882A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| ПРИЕМНОЕ УСТРОЙСТВО СО СТАБИЛИЗАЦИЕЙ УРОВНЯ ЛОЖНЫХ ТРЕВОГ | 1990 |
|
RU2226703C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2510040C2 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1841008A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2012 |
|
RU2510685C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1980 |
|
SU1840991A1 |
Изобретение относится к области радиолокации и может быть использовано в приемниках морских РЛС. Технический результат - повышение помехозащищенности. Устройство содержит последовательно включенные замкнутые в кольцо, первый аттенюатор, усилитель, детектор, ограничитель, ключ, интегратор, блок памяти и формирователь импульса ВАРУ, выход которого соединен с управляющим входом первого аттенюатора, а также синхронизатор, вход которого соединен с другим сигнальным входом формирователя импульса ВАРУ, а выходы синхронизатора соединены с управляющими входами блока памяти, интегратора и ключа, при этом второй аттенюатор включен между выходом ключа и входом интегратора, причем управляющий вход второго аттенюатора соединен с выходом формирователя импульса ВАРУ. 2 ил.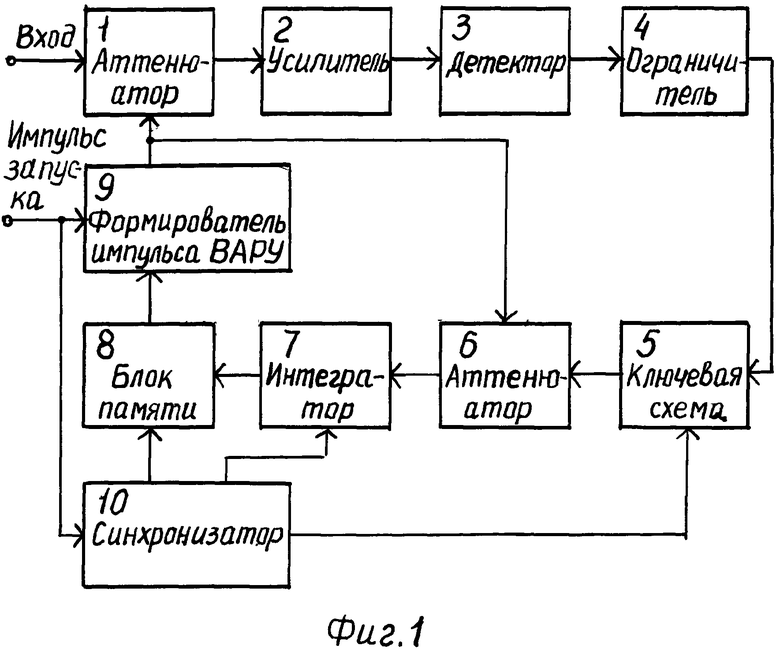
Устройство временной автоматической регулировки усиления (ВАРУ), содержащее последовательно включенные замкнутые в кольцо, первый аттенюатор, усилитель, детектор, ограничитель, ключ, интегратор, блок памяти и формирователь импульса ВАРУ, выход которого соединен с управляющим входом первого аттенюатора, а также синхронизатор, вход которого соединен с другим сигнальным входом формирователя импульса ВАРУ, а выходы соединены с управляющими входами блока памяти, интегратора и ключа, отличающееся тем, что, с целью повышения помехозащищенности, введен второй аттенюатор между выходом ключа и входом интегратора, причем управляющий вход второго аттенюатора соединен с выходом формирователя импульса ВАРУ.
| "Вопросы спецрадиоэлектроники" сер | |||
| РЛТ, вып | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Прибор, автоматически записывающий пройденный путь | 1920 |
|
SU110A1 |

