Предлагаемое изобретение относится к области радиолокации и может быть использовано для построения когерентно-импульсных радиолокационных систем, работающих в условиях комбинированных помех.
Известны РЛС с цифровыми фильтрами, обеспечивающие разрешение целей по скорости (см. заявку ФРГ №2256563 по кл. 21а4-48/63, заявку ФРГ №2204094 по кл. G01S 9/42, книгу В.К. Слока Вопросы обработки радиолокационных сигналов, "Советское радио", Москва, 1970, стр.196, 199).
РЛС, описанная в заявке ФРГ №2256563, состоит из входного устройства, детектора, аналого-цифрового преобразователя, набора допплеровских цифровых фильтров, цифровых перемножителей, набора узкополосных фильтров, выходного устройства.
Эхо-сигналы после входного устройства и детектора оцифровываются и поступают на допплеровский цифровой фильтр, соответствующий обрабатываемому элементу дальности, где происходит выделение сигналов движущихся целей. На следующем этапе обработки сигнал движущейся цели умножается на оцифрованные выборки синусоидальных колебаний набора частот, перекрывающих диапазон допплеровских приращений. Полученные таким образом преобразованные значения фильтруются узкополосным фильтром и поступают на выходное устройство.
К недостаткам технического решения, описанного в заявке ФРГ №2256563, следует отнести низкую скорость обработки, обусловленную многократными перемножениями оцифрованных выборок эхо-сигнала на оцифрованные выборки набора синусоидальных колебаний.
РЛС, описанная в заявке ФРГ №2204094, содержит преобразователь аналог-код, набор каналов дальности, цифровые допплеровские фильтры с регулируемой частотой характеристикой, устройство повторения, выходное устройство.
Пачка эхо-сигналов, преобразованная в код, поступает на цифровой допплеровский фильтр и, посредством устройства повторения, многократно обрабатывается этим фильтром при синхронном изменении частотной характеристики. Обработанные таким образом сигналы последовательно поступают на выходное устройство.
Однако при увеличении разрядности кода, или увеличении объема пачки, или при уменьшении периода повторения зондирующих импульсов обработка информации в реальном масштабе времени связана с практически непреодолимыми техническими трудностями, обусловленными резким возрастанием аппаратурных затрат.
Наиболее близким по технической сущности к предлагаемому является устройство, описанное в книге В.К. Слока «Вопросы обработки радиолокационных сигналов», "Советское радио", Москва, 1970, стр.196, 199, рис.8.2, 8.3. Это устройство содержит приемное устройство, квантователь фазы, цифровое устройство когерентной фильтрации с N выходами, число которых соответствует количеству разрешаемых допплеровских частот, N цифровых некогерентных фильтров, выходы которых подключены к цифровому решающему устройству; когерентный гетеродин, выход которого подключен ко входам передающего устройства и устройства когерентной фильтрации; и синхронизатор.
Пачка эхо-сигналов, оцифрованная в квантователе фазы, поступает в цифровое многоканальное устройство когерентной фильтрации (приведено на стр.199, рис.8.3).
Составляющие пачки умножаются на наборы синусных и косинусных весовых множителей, произведения суммируются и функционально обрабатываются для получения модуля корреляционного интеграла. Сравнение модуля корреляционного интеграла по выходам позволяет определить номер частотного канала и, следовательно, допплеровскую частоту эхо-сигнала. Последующее некогерентное накопление по N каналам повышает отношение сигнал-помеха и цифровое разрешающее устройство индицирует наличие цели на определенном элементе дальности и в определенном частотном канале.
Описываемое устройство позволяет производить разрешение целей по скорости в сложной помеховой обстановке путем частотной когерентной фильтрации эхо-сигналов. Однако последовательное во времени выполнение набора операций цифровой когерентной фильтрации недопустимо уже при частотах зондирования превышающих 1 кГц, пачке более 10 импульсов и числе допплеровских частот более 10. Параллельное выполнение набора вычислительных операций цифровой когерентной фильтрации позволяет производить обработку в реальном масштабе времени, однако аппаратурные затраты при этом возрастают примерно в (k·l·m·n2) раз, где k - объем пачки, l - число фильтруемых допплеровских частот, m - число обрабатываемых элементов дальности, n - количество разрядов.
Таким образом, последовательное во времени выполнение операций цифровой когерентной фильтрации выводит РЛС из режима работы в реальном масштабе времени, что недопустимо, а параллельное приводит к росту аппаратурных затрат на порядок и более.
Целью настоящего изобретения является повышение скорости обработки информации эхо-сигналов целей разрешаемых по скорости путем частотной когерентной фильтрации в режиме сопровождения при снижении аппаратурных затрат.
Указанная цель достигается тем, что в известную РЛС, состоящую из передающего устройства, когерентного гетеродина, приемного устройства, синхронизатора, квантователя фазы, цифровых некогерентных фильтров, цифрового решающего устройства, введены N цифровых фазовращателей, N-1 квантователей фазы и блок управления цифровыми фазовращателями, при этом выход когерентного гетеродина подключен к сигнальным входам цифровых фазовращателей, их управляющие входы соединены с соответствующими выходами блока управления цифровыми фазовращателями, выходы цифровых фазовращателей подключены к сигнальным входам соответствующих квантователей фазы, выходы квантователей фазы подключены ко входам соответствующих цифровых некогерентных фильтров, тактирующие входы блока управления цифровыми фазовращателями и квантователей фазы подключены к синхронизатору.
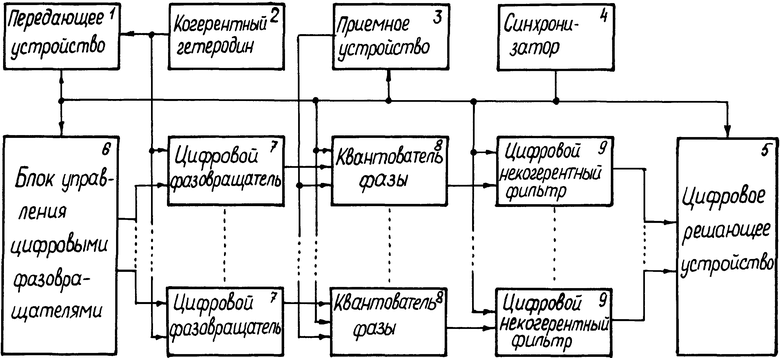
На рисунке представлена блок-схема РЛС с цифровым фильтром.
РЛС состоит из передающего устройства 1, когерентного гетеродина 2, приемного устройства 3, синхронизатора 4, цифрового решающего устройства 5, блока управления цифровыми фазовращателями 6, цифровых фазовращателей 7, квантователей фазы 8, цифровых некогерентных фильтров 9. Выход когерентного гетеродина 2 подключен к передающему устройству 1 и сигнальным входам цифровых фазовращателей 7, управляющий вход каждого цифрового фазовращателя 7 соединен с соответствующим выходом блока управления цифровыми фазовращателями 6. Выход каждого цифрового фазовращателя 7 подключен к опорному входу соответствующего квантователя фазы 8, сигнальный вход каждого квантователя фазы 8 связан с выходом приемного устройства 3. Выход каждого квантователя фазы 8 подключен ко входу соответствующего цифрового некогерентного фильтра 9. Выход каждого цифрового некогерентного фильтра 9 соединен с соответствующим входом цифрового решающего устройства 5. Тактирующие входы передающего устройства 1, приемного устройства 3, цифрового решающего устройства 5, блока управления цифровыми фазовращателями 6, квантователей фазы 8, цифровых некогерентных фильтров 9 подключены к синхронизатору 4.
РЛС работает следующим образом: передающее устройство 1 в моменты времени, определяемые синхронизатором 4, вырабатывает зондирующие радиоимпульсы, фазированные когерентным гетеродином 2. Эхо-сигналы, обработанные и перенесенные на промежуточную частоту приемным устройством 3, поступают на сигнальные входы квантователей фазы 8. На опорные входы квантователей фазы 8 поступает непрерывное монохроматическое колебание когерентного гетеродина 2, фаза которого в каждом из цифровых фазовращателей 7 один раз за период зондирования по команде синхронизатора 4, скачком изменяется на величину, задаваемую индивидуально для каждого цифрового фазовращателя 7 блоком управления цифровыми фазовращателями 6. Квантователи фазы 8, тактируемые синхронизатором 4, преобразуют фазовый сдвиг между опорным колебанием и несущей частотой эхо-сигнала в двоичный код. Цифровые некогерентные фильтры 9, тактируемые синхронизатором 4, производят накопление двоичнокодированной информации о фазовом сдвиге по выходу каждого квантователя фазы 8.
Цифровое решающее устройство 5, тактируемое синхронизатором 4, анализирует поступающую информацию с выходов каждого цифрового некогерентного фильтра 9 и, в соответствии с выбранным критерием, производит оценку наличия цели.
Принципиальные отличия обработки информации в заявляемой РЛС можно пояснить следующим образом. Эхо-сигналы - сигналы, усиленные и перенесенные на промежуточную частоту приемным устройством, поступают в N-канальный когерентный фильтр, каждый канал которого состоит из последовательно соединенных цифрового фазовращателя, квантователя фазы и цифрового некогерентного фильтра. Частоты настройки каждого из N каналов фильтра задаются блоком управления цифровыми фазовращателями, который по тактам синхронизатора формирует для каждого цифрового фазовращателя индивидуальный набор кодов, отражающих выборки из текущего значения фаз допплеровских приращений частоты. Цифровые фазовращатели один раз в период манипулируют фазу сигнала когерентного гетеродина, подаваемого на квантователи фазы в качестве опорного, причем приращение фазы соответствует междупериодному набегу фазы, определяемому допплеровским сдвигом частоты.
Таким образом, разность фаз между опорным колебанием с манипулируемой фазой и эхо-сигналом, допплеровское смещение частоты которого соответствует частоте настройки канала, будет величиной постоянной в каждом элементе дальности для пачки эхо-сигналов при постоянстве скорости цели за время формирования пачки. Оцифрованная в цифровом квантователе фазы постоянная разность фаз накапливается в цифровом некогерентном фильтре, что снижает влияние переменных регулярных и случайных флюктуаций фазы, обусловленных помехами, и поступает в цифровое решающее устройство.
По сравнению с прототипом, в котором широко используются перемножители кодированной информации, повышающие в два раза количество разрядов на выходе и понижающие быстродействие, в предлагаемом техническом решении операция перемножения исключена. Это приводит к повышению скорости обработки информации и снижению аппаратурных затрат на 7-10% при объеме пачки 20 импульсов. При увеличении объема пачки до 50÷100 импульсов, что характерно для режима сопровождения, аппаратурные затраты уменьшаются на 15÷20%. Наличие идентичных каналов позволяет повысить аппаратурную надежность РЛС, изменение программы работы блока управления цифровыми фазовращателями позволяет оперативно изменять алгоритм обработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1980 |
|
SU1840929A1 |
| ЦИФРОВОЕ УСТРОЙСТВО КОГЕРЕНТНОЙ ОБРАБОТКИ | 1974 |
|
SU1840884A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| ЦИФРОВОЙ КОГЕРЕНТНЫЙ ФИЛЬТР | 1975 |
|
SU1840918A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| СПОСОБ КОГЕРЕНТНОГО ПРИЕМА ОТРАЖЕННОГО СИГНАЛА ПРИ НЕКОГЕРЕНТНОМ ИЗЛУЧЕНИИ ЗОНДИРУЮЩЕГО СИГНАЛА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2315331C1 |
Изобретение относится к области радиолокации. Достигаемый технический результат - повышение скорости обработки информации эхо-сигналов. Указанный результат достигается за счет того, что радиолокационная станция содержит передающее устройство, вход которого подключен к выходу когерентного гетеродина, приемное устройство, выход которого подключен к сигнальному входу квантователя фазы, цифровые некогерентные фильтры, выходы которых подключены к входам цифрового решающего устройства, синхронизатор, к выходу которого подключены тактирующие входы квантователя фазы, цифрового решающего устройства, цифровых некогерентных фильтров приемного и передающего устройств, содержит также N цифровых фазовращателей, N-1 квантователей фазы и блок управления цифровыми фазовращателями, причем выход когерентного гетеродина подключен к сигнальным входам цифровых фазовращателей, их управляющие входы соединены с соответствующими выходами блока управления цифровыми фазовращателями, выходы цифровых фазовращателей подключены к сигнальным входам соответствующих квантователей фазы, выходы которых подключены к входам соответствующих цифровых некогерентных фильтров, а тангирующие входы квантователей фазы и блока управления цифровыми фазовращателями подключены к синхронизатору. 1 ил.
Радиолокационная станция с цифровым фильтром, состоящая из передающего устройства, вход которого подключен к выходу когерентного гетеродина, приемного устройства, выход которого подключен к сигнальному входу квантователя фазы, цифровых некогерентных фильтров, выходы которых подключены к входам цифрового решающего устройства и синхронизатора, к выходу которого подключены тактирующие входы квантователя фазы, цифрового решающего устройства, цифровых некогерентных фильтров приемного и передающего устройств, отличающаяся тем, что, с целью повышения скорости обработки информации эхо-сигналов, в радиолокационную станцию дополнительно введены N цифровых фазовращателей, N-1 квантователь фазы и блок управления цифровыми фазовращателями, причем выход когерентного гетеродина подключен к сигнальным входам цифровых фазовращателей, их управляющие входы соединены с соответствующими выходами блока управления цифровыми фазовращателями, выходы цифровых фазовращателей подключены к сигнальным входам соответствующих квантователей фазы, выходы которых подключены к входам соответствующих цифровых некогерентных фильтров, а тангирующие входы квантователей фазы и блока управления цифровыми фазовращателями подключены к синхронизатору.
| "Радиолокационная станция с цифровым фильтром", пат | |||
| УСИЛИВАЮЩИЙ БРУС ДЛЯ ЭЛЕМЕНТА КОРПУСА И/ИЛИ ШАССИ АВТОМОБИЛЯ | 2000 |
|
RU2256563C2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| В.К | |||
| Слок "Вопросы обработки радиолокационных сигналов" изд | |||
| «Сов | |||
| Радио», 1970 г., стр.196. | |||

