Предлагаемое устройство отождествления целей относится к области радиотехники и может быть использовано в системах радиотехнической разведки и системах пассивного обнаружения и целеуказания.
Очень широко, из-за своей простоты, распространен пеленгационный (угломерный) метод определения координат источников излучения. Сущность его заключается в том, что с помощью измерительных систем, как минимум двух, расположенных в различных точках, определяются только направления на цель. Тогда в плоскости местоположение цели находится как точка пересечения двух линий пеленгов, полученных с разных носителей. В пассивных системах, размещаемых на кораблях-носителях, один из кораблей именуется флагманским кораблем (ФК), а другой - кораблем группы (КГ). При работе пассивных систем в современном радиолокационном поле, которое характеризуется большим количеством однотипных станций, которые могут быть как с перестраиваемыми, так и с фиксированными параметрами, чисто параметрическое отождествление целей, полученных на различных кораблях, малоэффективно. А если это так, то в случае наличия в диаграмме направленности пассивных станций нескольких однотипных источников излучения (к примеру три), то при отождествлении целей необходимо, при определении координат источников излучения, из девяти точек пересечения линий пеленгов выделить только три точки, координаты которых являются истинными и отбросить шесть точек, координаты которых - ложные (фиг.2).
В современных устройствах радиотехнической разведки для отождествления целей наиболее часто используются устройства параметрического отождествления целей по их основным параметрам: несущей частоте f, длительности импульсов τ и периоду повторения T сигналов в последовательности.
В этих устройствах (см. Муровцев Г.П. и др. "Основы радиотехнической разведки" КВИРТУ ПВО, 1972) для отождествления целей, полученных на различных носителях, измеряют их основные параметры f, τ, T и сравнивают по этим параметрам цели между собой. При совпадении параметров целей в заданных стробах производят отождествление целей, полученных на различных носителях, что позволяет в последующем определить координаты источника излучения (цели). В противном случае считается, что сравниваемые параметры принадлежат различным целям и точка пересечения их пеленгов является ложной.
Известно устройство идентификации цели по виду отраженного радиолокационного сигнала, патент США, кл. 343-5 №4001820, публикация 04.01.1977. В этом устройстве используется обучающийся алгоритм, реализуемый с помощью счетно-решающих приборов. Принятые сигналы с антенны со взаимно-ортогональными поляризациями через схему типа "И" поступают на линию задержки с отводами, сигналы каждого из отводов группируются во взвешенные суммы, которые сравниваются с соответствующими пороговыми уровнями в пороговых устройствах. При превышении всех порогов срабатывает выходное устройство, фиксируя наличие разыскиваемой цели.
Известно устройство идентификация сигналов (патент США, кл. 343-17.1 №4001816, публикация 25.11.1975) которое обладает заранее известными характеристиками (f, τ, T). В устройство входит набор параллельных азимутальных каналов, подключенных к решетке приемных вибраторов. Диаграммы направленности отдельных вибраторов пересекаются на уровне - 3 дБ и все вместе перекрывают заданный сектор обзора. В каждом канале установлены схемы идентификации импульсов по длительности и частоте повторения, общей для всех каналов является схема идентификации по несущей частоте.
Известно устройство идентификации источников радиоизлучений (см. заявку №156256 от 1974 г.), содержащее антенну, радиоприемное устройство и анализатор, соединенные последовательно, и широкобазовый амплитудный пеленгатор, подключенный к устройству измерения пеленга, при этом выходы анализатора и устройства измерения пеленга присоединены последовательно. С целью повышения разрешающей способности в нем между пеленгатором и анализатором включено устройство измерения амплитудной характеристики антенны пеленгатора.
Известно устройство идентификации последовательностей сигналов, состоящее из измерительного блока приемного устройства, блока формирования последовательностей, блока определения периода повторения последовательностей, блока памяти, блока управления, блока вычисления разностей значения параметров, блока определения типа перестройки параметров, блока дополнительного порогового устройства, блока сравнения последовательностей по параметрам, блока усреднения параметров. В устройстве производится предварительное определение типа перестройки параметров сигналов источников излучения, на основании этого выбираются различные значения порогов.
Наиболее близким по технической сути и поэтому выбранным в качестве прототипа является устройство параметрического отождествления целей, реализованное в изделии "Титанит" ГК1.640.001.
Устройство-прототип размещается на двух кораблях-носителях, один из которых именуется флагманским кораблем (ФК), а другой - кораблем группы (КГ). На каждом из кораблей размещены антенна, совместно с датчиком пеленга, приемное устройство, блок формирования последовательностей, блок формирования целей, запоминающее устройство (ЗУ), которые соединены последовательно, а также устройство взаимного обмена (УВО) и блок синхронизации, причем выход последнего соединен со вторым входом приемного устройства, кроме того на ФК с выходом ЗУ соединены последовательно соединенные блок сравнения по параметрам и блок пороговых устройств, выход которого служит выходом устройства, а выход УВО соединен со вторым входом блока сравнения по параметрам, а на КГ выход ЗУ соединен со входом УВО.
Устройство-прототип работает следующим образом.
На вход антенны на каждом корабле-носителе поступают сигналы разведываемых источников излучения, с антенны они поступают в приемное устройство, в котором производится измерение основных параметров, таких как f и τ. Кроме того, с автономных блоков синхронизации в приемное устройство поступает значение текущего времени, которое присваивается каждому принятому сигналу. В блоке формирования последовательностей формируются последовательности сигналов путем использования параметрически временных методов. Кроме того, здесь же сформированным последовательностям присваивается значение пеленга, поступающее с выхода датчика пеленга. Из сформированных последовательностей сигналов в блоке формирования целей образуются цели, которые характеризуются определенным вектором параметров, и они заносятся в запоминающее устройство. На КГ из запоминающего устройства с помощью устройства взаимного обмена векторы параметров разведываемых РЛС поступают на ФК в блок сравнения по параметрам, на другой вход которого поступают векторы параметров целей, обнаруженных на ФК. Сравнение по вектору параметров происходит в блоке пороговых устройств. При сравнении всех параметров в выбранных стробах пеленги отождествленных целей поступают на выход устройства. По полученным пеленгам, с известной базой между носителями, производится определение координат источников излучения.
К недостаткам данного устройства следует отнести низкую вероятность отождествления целей, полученных на различных кораблях-носителях при работе системы в сложном радиолокационном поле, что обуславливает появление ложных пересечений пеленгов (получение координат ложных целей).
Целью данного изобретения является повышение вероятности правильного отождествления целей и уменьшение вероятности образования ложных целей.
Поставленная цель достигается тем, что в известное устройство отождествления целей, размещаемое на двух кораблях, один из которых именуется ФК, а другой - КГ, состоящее из последовательно соединенных антенны, на валу которой размещен датчик пеленга, приемного устройства, блока формирования последовательностей, блока формирования целей, запоминающего устройства (ЗУ), а также из блока синхронизации и устройства взаимного обмена (УВО), размещаемых на обоих кораблях, причем выход блока синхронизации соединен со вторым входом приемного устройства, а выход датчика пеленга соединен со вторым входом блока формирования последовательностей, при этом на ФК выход ЗУ соединен с последовательно соединенными блоком сравнения по параметрам и блоком пороговых устройств, выход последнего служит выходом устройства, а первый выход устройства взаимного обмена соединен со вторым входом блока сравнения по параметрам, а на КГ выход ЗУ соединен с первым входом УЕО, дополнительно введены на ФК последовательно соединенные блок определения периода вращения антенн, блок выработки временных стробов и блок экстраполяции, выход которого соединен со вторым входом ЗУ, а вход блока определения периода вращения антенн соединен со вторым выходом блока формирования последовательностей, а на КГ дополнительно введен блок определения периода вращения антенн, вход которого соединен со вторым выходом блока формирования последовательностей, а выход соединен со вторым входом ЗУ, при этом на обоих кораблях УВО соединено двусторонней связью с блоком синхронизации.
Такое построение системы позволяет с высокой вероятностью правильно отождествлять однотипные источники излучения, разведанные на различных носителях, что уменьшает вероятность работы по определению координат ложных целей.
Это достигается тем, что в начале работы производится взаимная синхронизация блоков синхронизации с помощью устройства взаимного обмена, что позволяет системам, размещаемым на различных кораблях-носителях, работать в масштабе единого времени. Введение блока определения периода вращения антенны, блока выработки временных стробов и блока экстраполяции позволяет не только измерять период вращения антенн источников излучения, значение которого для однотипных РЛС может быть также одинаковым, как и другие параметры, но при этом используется информация о значении текущего времени, при котором основной лепесток диаграмм направленности антенн разведываемых источников проходит направление на каждый корабль-носитель. При известной базе между кораблями-носителями, зная диапазон дальностей до разведываемых РЛС, можно проэкстраполировать время прохода основным лепестком направления на второй корабль, при знании времени прохода направления на первый корабль и значения периода вращения диаграммы направленности антенны источника излучения совместно с величиной вобуляции периода вращения.
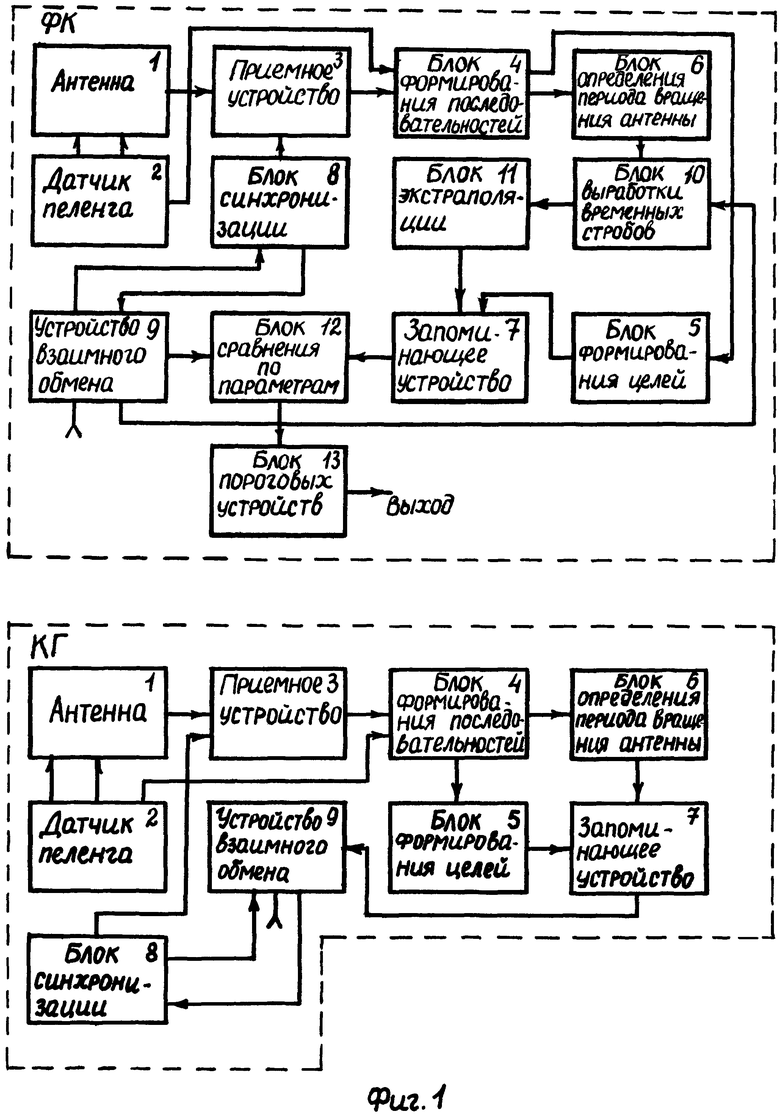
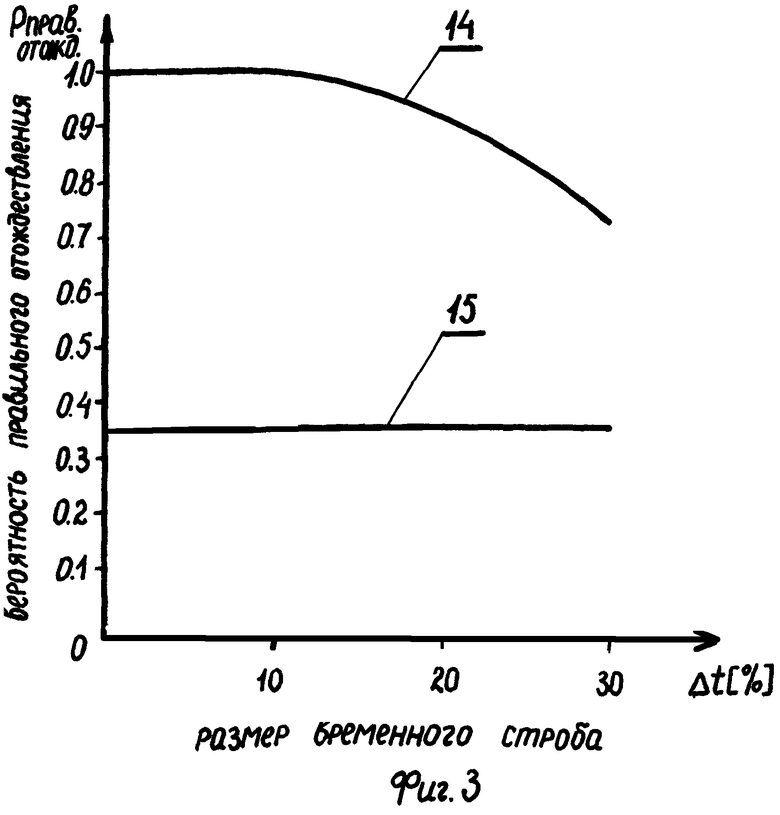
На фиг.1 изображена блок-схема предлагаемого устройства, на фиг.2 показана типовая ситуация работы пассивных станций при невозможности разделения источников излучения по основным параметрам, таким как f, τ, T. На фиг.3 приведена зависимость вероятности правильного отождествления целей в зависимости от размеров временного строба, при наличии трех однотипных станций в зоне обзора, полученная путем статистического моделирования работы предлагаемого устройства.
Предлагаемое устройство (фиг.1) размещается на двух кораблях-носителях, один из которых именуется ФК, а другой - КГ, и состоит из антенны 1, на оси которого размещен датчик пеленга 2, приемного устройства 3, блока формирования последовательностей 4, блока формирования целей 5, блока определения периода вращения антенн 6, запоминающего устройства 7, блока синхронизации 8 и устройства взаимного обмена 9, которые размещены на обоих кораблях-носителях, кроме того, на ФК устройство состоит из блока выработки временных стробов 10, блока экстраполяции 11, блока сравнения по параметрам 12, блока пороговых устройств 13. На ФК антенна 1, приемное устройство 3, блок формирования последовательностей 4, блок формирования целей 5, запоминающее устройство 7, блок сравнения по параметрам 12 и блок пороговых устройств 13 соединены последовательно, выход датчика пеленга 2 соединен со вторым входом блока формирования последовательностей 4, второй выход последнего соединен с последовательно соединенными блоком определения периода вращения антенн 6, блоком выработки временных стробов 10 и блоком экстраполяции 11, выход которого соединен со вторым входом запоминающего устройства 7, первый выход УВО 9 соединен со вторым входом блока сравнения по параметрам 12, а второй выход УВО 9 соединен со вторым входом блока выработки временных стробов 10 и, кроме того, УВО 9 двусторонней связью соединен с блоком синхронизации 8, выход которого подключен ко второму входу приемного устройства 3. На КГ антенна 1, приемное устройство 3, блок формирования последовательностей 4, блок формирования целей 5, запоминающее устройство 7 и устройство взаимного обмена 9 соединены последовательно, а второй выход блока формирования последовательностей 4 соединен со входом блока определения периода вращения антенн 6, выход которого соединен со вторым входом запоминающего устройства 7, УВО 9 двусторонней связью соединено со входом блока синхронизации 8, выход которого соединен со вторым входом приемного устройства 3.
Устройство отождествления целей работает следующим образом.
В первоначальный момент совместной работы производится установка блоков синхронизации 8 в режим, при котором они работают в масштабе единого времени, что обеспечивается УВО 9. После ввода в синхронизм производится независимый поиск и обнаружение сигналов разведываемых источников в заданном пространственном секторе каждой из систем расположенных на ФК и КГ. При этом сигналы источников излучения принимаются антенной 1 и поступают в приемное устройство 3, в котором измеряются основные параметры сигналов f и τ, а также каждому импульсу присваивается значение текущего времени t, после чего импульсы поступают в блок формирования последовательностей 4, в котором происходит объединение сигналов по параметрам и определяется период повторения сигналов T. В этом блоке производится также приписывание последовательностям значения текущего пеленга. Вектор параметров, характеризующий каждую последовательность, поступает как в блок формирования целей 5, так и в блок определения периода вращения антенн 6. В блоке формирования целей 5 последовательности сигналов объединяются по принадлежности к различным источникам излучения с использованием параметрически-временных и пространственных характеристик. Параметры каждой цели поступают в запоминающее устройство 7. В блоке определения периода вращения антенн 6 производится измерение периода вращения антенн, используя информацию о периодичности облучения главным лепестком диаграммы направленности (ДН) антенны РЛС и случайным процессом во времени обнаружения боковых лепестков. В блоке определения периода вращения антенн 6 измеряется также вобуляция периода вращения. Значения периода вращения, текущие времена обнаружения главных лепестков ДН антенн источников излучения и диапазон вобуляции поступают только на ФК в блок выработки временных стробов 10, на второй вход которого поступает значение базы между кораблями-носителями с УВО 9. На основании этих данных формируются в этом блоке 10 временные стробы, в которых возможно появление главных лепестков ДН антенн РЛС, обнаруженных на КГ. Эти временные стробы поступают в блок экстраполяции 11, в котором в соответствии с периодом вращения и вобуляцией периода вращения производится экстраполяция их. Эти временные стробы поступают для каждой обнаруживаемой цели и запоминаются в ЗУ 7. На КГ в запоминающее устройство 7 поступает информация с блока формирования целей 5 (так же, как на ФК), а также с блока определения периода вращения антенн 6 значение периода вращения и времена обнаружения каждого главного лепестка ДН антенн источников излучения. Эта вся информация с ЗУ 7 поступает через УВО 9 на ФК в блок сравнения по параметрам 12, на второй вход которого поступает информация с ЗУ 7. В блоке пороговых устройств 13 при непревышении ни одной разности параметров целей, обнаруженных на ФК и КГ, выставленных значений порогов, в том числе и времен обнаружения главных лепестков ДН антенн, делается заключение об отождествлении целей, и точка пересечения их пеленгов считается координатой разведываемого источника излучения. При превышении разности над порогом хотя бы по одному из параметров цели не отождествляются.
Результаты статистического моделирования работы предлагаемого устройства подтвердили его эффективность. Моделирование проводилось на ЦВМ "БЭСМ-6". Моделировалась работа данного устройства, когда в зоне обзора пассивных станций, расположенных на ФК и КГ, находятся при однотипных источниках излучения, разнесенных по азимуту один относительно другого на 1°.
Данные моделирования приведены на фиг.3. По оси абсцисс отложено значение вероятности правильного отождествления Pправ.отож., а по оси ординат - размер временного строба в процентах от периода вращения антенн. Кривая 14 характеризует работу предлагаемого устройства, а кривая 15 - устройства прототипа.
Как видно из графика, Pправ.отож. предлагаемого устройства изменяется от 1 до 0,7 при достижении размеров временного строба 30% периода вращения, в то время как для прототипа Pправ.отож. составляет 0,34 и независимо от временного строба.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 1989 |
|
SU1841037A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА ИЗЛУЧЕНИЯ | 1981 |
|
SU1840936A1 |
| БОРТОВАЯ СТАНЦИЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 1989 |
|
SU1841039A1 |
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| СПОСОБ ТРАССИРОВАНИЯ НАЗЕМНЫХ И МОРСКИХ РАДИОИЗЛУЧАЮЩИХ ЦЕЛЕЙ | 2023 |
|
RU2807613C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СПОСОБ И СИСТЕМА ИДЕНТИФИКАЦИИ ИЗМЕРЕНИЙ В МНОГОДИАПАЗОННЫХ РЛС | 2014 |
|
RU2574075C1 |
| СИСТЕМА АКТИВНОЙ ГИДРОЛОКАЦИИ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2009 |
|
RU2393503C1 |
| Гидроакустический комплекс для надводных кораблей | 2023 |
|
RU2805135C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ПРОТИВОДЕЙСТВИЯ | 2002 |
|
RU2237907C2 |

Изобретение предназначено для систем пассивного обнаружения и целеуказания. Достигаемый технический результат - улучшение вероятностных характеристик отождествления целей. Указанный результат достигается за счет того, что устройство содержит два разнесенных в пространстве носителя каналов обработки, каждый из которых содержит последовательно включенные блоки параметрической и пространственно-временной селекции сигналов и блок памяти, блок взаимного обмена сигналами, а также установленный на ведущем носителе блок сравнения сигналов, выход которого подключен к пороговому устройству, первый вход связан с выходом блока взаимного обмена, а второй вход - с выходом блока памяти, выход блока памяти, установленного на ведомом носителе связан с первым входом блока взаимного обмена, устройство содержит также на ведущем носителе последовательно включенные блок определения периода вращения антенн, блок стробирования и блок экстраполяции, выход которого связан с вторым входом блока памяти, а ведомый носитель содержит также дополнительный блок определения периода вращения антенн, выход которого соединен с вторым входом блока памяти, входы блоков определения периода вращения антенн подключены к выходам соответствующих блоков параметрической селекции сигналов. 3 ил.
Устройство для отождествления целей, состоящее из размещенных на двух разнесенных в пространстве носителях каналов обработки, каждый из которых содержит последовательно включенные блоки параметрической и пространственно временной селекции сигналов и блок памяти, блок взаимного обмена сигналами, а также установленный на ведущем носителе блок сравнения сигналов, выход которого подключен к пороговому устройству, первый вход связан с выходом блока взаимного обмена, а второй вход - с выходом блока памяти, а выход блока памяти, установленного на ведомом носителе, связан с первым входом блока взаимного обмена, отличающееся тем, что, с целью улучшения вероятностных характеристик отождествления целей, на ведущем носителе дополнительно установлены последовательно включенные блок определения периода вращения антенн, блок стробирования и блок экстраполяции, выход которого связан с вторым входом блока памяти, а на ведомом носителе введен дополнительный блок определения периода вращения антенн, выход которого соединен с вторым входом блока памяти, при этом входы блоков определения периода вращения антенн, установленных на ведущем и ведомом носителях, подключены к выходам соответствующих блоков параметрической селекции сигналов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США №4001816, 343-17.1 от 25.11.1975. | |||

