Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов.
Известны способы определения параметров движения целей, в том числе скорости и курса цели, основанные на построении траектории движения в процессе автоматического сопровождения цели (АСЦ) (С.З.Кузьмин. Цифровая обработка радиолокационной информации, Сов.радио, М.: 1967, с.10, 20-26, 340-347).
Известно устройство, реализующее способ автоматического сопровождения маневрирующей цели в режиме активной локации гидроакустического комплекса (патент РФ на изобретение №2260197, приоритет от 15.01.2003). Устройство осуществляет излучение зондирующих сигналов, прием эхосигналов приемным трактом режима активной локации, обнаружение эхосигналов от цели в каждом цикле обзора, получение соответствующих им значений координат - дистанции и пеленга на цель, построение стробов сопровождения, сглаживание координат цели, измерение величины радиальной составляющей скорости цели, прием трактом режима пассивной локации сигналов собственного излучения цели, измерение с помощью этого тракта мгновенных значений пеленга на цель, по которым определяется угловая скорость цели - величина изменения пеленга (ВИП), сглаживание координат цели с учетом радиальной и угловой скорости цели.
Недостатком указанных систем является то, что число циклов излучения-приема активного гидролокатора, а значит и время, необходимое для выработки координат и параметров движения цели с необходимой для задачи целеуказания точностью, в режиме АСЦ весьма велико и составляет примерно 10 и более циклов излучения - приема.
Однако в ряде случаев, например, при классификации обнаруженных целей требуется минимальное время для решения этой задачи и, следовательно, минимальное число циклов излучения-приема активного гидролокатора для определения параметров движения цели - скорости и курса цели, необходимых для классификации.
Известна система активной гидролокации гидроакустической станции (ГАС), содержащая излучающую и приемную акустические антенны, последовательно соединенные устройство формирования зондирующего сигнала, устройство формирования характеристик направленности в излучении, генераторное устройство, последовательно соединенные устройство формирования характеристик направленности системы гидролокации (ГЛ) в приеме и устройство обработки эхосигналов от цели, последовательно соединенные устройство формирования характеристик направленности системы шумопеленгования (ШП), устройство обработки сигналов системы ШП, блок связи ГАС с системами корабля, причем выход генераторного устройства соединен с излучающей акустической антенной, вход устройства формирования характеристик направленности системы ГЛ в приеме и вход устройства формирования характеристик направленности системы ШП соединены с приемной акустической антенной (см. Справочник по гидроакустике. А.П.Евтютов, А.Е.Колесников, Е.А.Корепин и др. 2-е изд. - Л.: Судостроение, 1988, с.18-25, 27-29).
Известно также (об этом говорится в книгах: Из истории отечественной гидроакустики, СПб, 1998 г, с.177, 50 лет ЦНИИ "Морфизприбор", СПб, 1999 г., с.134, 139), что в системах активной гидролокации гидроакустических станций имеется режим измерения дистанции (ИД) до цели, в котором излучение и прием сигналов активным гидролокатором производится в направлении пеленга на цель, поступающего от устройства измерения пеленга системы ШП.
Недостатком указанных систем активной гидролокации гидроакустической станции является то, что в них не определяются параметры движения цели - скорость и курс, необходимые для решения задачи классификации в системе ГЛ.
Техническим результатом изобретения является обеспечение возможности определения скорости и курса обнаруженной цели за один цикл излучения-приема системы активного гидролокатора гидроакустической станции с приемлемой для классификации цели в системе ГЛ точностью.
Для достижения этого технического результата предлагается система активной гидролокации гидроакустической станции (ГАС), содержащая излучающую и приемную акустические антенны, последовательно соединенные устройство формирования зондирующего сигнала, устройство формирования характеристик направленности в излучении, генераторное устройство, последовательно соединенные устройство формирования характеристик направленности системы гидролокации (ГЛ) в приеме и устройство обработки эхосигналов от цели, также содержащая устройство измерения дистанции до цели, устройство измерения радиальной составляющей скорости цели (ВИР), последовательно соединенные устройство формирования характеристик направленности системы шумопеленгования (ШП), устройство обработки сигналов системы ШП, устройство измерения пеленга на цель системы ШП и блок определения величины изменения пеленга (ВИП), также содержащая последовательно соединенные блок определения общей тангенциальной составляющей скорости и блок определения тангенциальной составляющей скорости цели, блок определения скорости цели, блок определения курса цели и блок связи ГАС с системами корабля, причем выход генераторного устройства соединен с излучающей акустической антенной, второй выход устройства формирования зондирующего сигнала соединен со вторым входом устройства измерения дистанции до цели, первый вход устройства формирования характеристик направленности системы ГЛ в приеме и вход устройства формирования характеристик направленности системы ШП соединены с приемной акустической антенной, первый и второй выходы устройства обработки эхосигналов от цели соединены с первым входом устройства измерения дистанции до цели и со входом устройства измерения радиальной составляющей скорости цели соответственно, второй выход устройства измерения пеленга на цель системы ШП соединен со вторым входом устройства формирования характеристик направленности в излучении и вторым входом устройства формирования характеристик направленности системы ГЛ в приеме, выход устройства измерения дистанции до цели соединен с первым входом блока определения общей тангенциальной составляющей скорости, второй вход которого соединен с выходом блока определения ВИП, третий выход устройства измерения пеленга на цель системы ШП соединен со вторым входом блока определения тангенциальной составляющей скорости цели, третий вход которого соединен с выходом блока связи ГАС с системами корабля, выход блока определения тангенциальной составляющей скорости цели соединен с первыми входами блока определения скорости цели и блока определения курса цели, выход устройства измерения радиальной составляющей скорости цели соединен со вторыми входами блока определения скорости цели и блока определения курса цели, четвертый выход устройства измерения пеленга на цель системы ШП соединен с третьим входом блока определения курса цели.
Новыми признаками, неизвестными из рассмотренных аналогов, являются последовательно соединенные блок определения общей тангенциальной составляющей скорости и блок определения тангенциальной составляющей скорости цели, также блок определения скорости цели и блок определения курса цели, а также связи этих новых блоков с известными блоками системы ГЛ, системы ШП и блоком связи ГАС с системами корабля.
Указанный результат достигается путем обеспечения возможности определения величины общей тангенциальной составляющей скорости за счет использования величины ВИП от системы ШП ГАС и величины дистанции до цели от системы ГЛ, обеспечения возможности определения тангенциальной составляющей скорости цели на основе использования величины общей тангенциальной составляющей скорости, величины пеленга на цель от системы ШП и величин скорости и курса корабля - носителя ГАС и обеспечения возможности определения скорости и курса цели на основе использования радиальной и тангенциальной составляющей скорости цели за один цикл излучения-приема.
Сущность изобретения поясняется чертежом, где приведена блок-схема предложенной системы активной гидролокации гидроакустической станции.
Система активной гидролокации гидроакустической станции (ГАС) содержит излучающую 1 и приемную 2 акустические антенны, последовательно соединенные устройство 5 формирования зондирующего сигнала, устройство 4 формирования характеристик направленности в излучении, генераторное устройство 3, последовательно соединенные устройство 6 формирования характеристик направленности системы гидролокации (ГЛ) в приеме и устройство 7 обработки эхосигналов от цели, последовательно соединенные устройство 10 формирования характеристик направленности системы шумопеленгования (ШП), устройство 11 обработки сигналов системы ШП, устройство 12 измерения пеленга на цель системы ШП и блок 13 определения величины изменения пеленга (ВИП), устройство 8 измерения дистанции до цели, устройство 9 измерения радиальной составляющей скорости цели (ВИР), блок 15 связи ГАС с системами корабля, также содержит последовательно соединенные блок 14 определения общей тангенциальной составляющей скорости и блок 16 определения тангенциальной составляющей скорости цели, также содержит блок 17 определения скорости цели и блок 18 определения курса цели.
Работа устройства осуществляется следующим образом.
Сигналы шумоизлучения цели и эхосигналы от цели с выхода приемной акустической антенны 2 поступают на приемные тракты систем ШП и ГЛ. Системы ШП и ГЛ формируют свои характеристики направленности с помощью устройства 10 формирования характеристик направленности системы ШП и устройства 6 формирования характеристик направленности системы ГЛ в приеме соответственно. Далее сигналы поступают на устройство 11 обработки сигналов системы ШП, при обнаружении шумоизлучения цели в устройстве 12 производится измерение пеленга на цель системы ШП. Измерение пеленга на цель может выполняться, в частности, с помощью устройства автоматического сопровождения цели (АСЦ) системы ШП. Далее мгновенные значения пеленга на цель поступают на вход блока 13 определения ВИП, а также на вход устройств 4 формирования характеристик направленности в излучении и устройство 6 формирования характеристик направленности в приеме системы ГЛ. Таким образом, излучение зондирующего сигнала и прием эхосигнала от цели производятся в направлении пеленга на цель, измеренного в системе ШП. Система активной гидролокации производит формирование характеристик направленности в излучении в устройстве 4 в направлении пеленга на цель поступающего от устройства 13 измерения пеленга на цель системы ШП. Устройство 5 формирования зондирующего сигнала вырабатывает зондирующие сигналы. Производится излучение зондирующего сигнала с помощью генераторного устройства 3 и излучающей акустической антенны 1.
Отраженный от объекта эхосигнал с выхода приемной акустической антенны 2 поступает на устройство 6 формирования характеристик направленности системы ГЛ в приеме. С выхода устройства 6 принятый сигнал поступает на устройство 7 обработки эхосигналов от цели. При обнаружении эхосигналов от цели в устройстве 8 производится измерение дистанции до цели и в устройстве 9 измерение радиальной составляющей скорости цели.
По полученным величинам ВИП в системе ШП и дистанции до цели в системе ГЛ в блоке 14 производится определение общей тангенциальной составляющей скорости, например, в соответствии с соотношением (1).

где Vot - общая тангенциальная составляющая скорости;
Д - дистанция до цели;
ВИП - величина изменения пеленга.
Величина ВИП, определенная системой ШП, зависит как от движения цели, так и от движения корабля-носителя ГАС. Величина общей тангенциальной составляющей скорости также зависит от перемещения цели и движения корабля-носителя ГАС.
Затем в блоке 16 с учетом параметров движения корабля-носителя ГАС (курса и скорости корабля), поступающих из блока 15, производится определение тангенциальной составляющей скорости цели, например в соответствии с выражением (2).

где Vt - тангенциальная составляющая скорости цели;
Vot - общая тангенциальная составляющая скорости;
VН - скорость корабля-носителя;
КН - курс корабля-носителя;
П - пеленг на цель.
В блоке 17 и 18 по двум составляющим скорости цели, а именно по радиальной составляющей скорости цели, поступающей из блока 9, и тангенциальной составляющей скорости цели, поступающей из блока 16, производится определение параметров движения цели, а именно скорости и курса цели, например, в соответствии с выражениями (3) и (4).
 и
и
где К - курс цели;
V - скорость цели
Vp - радиальная составляющая скорости цели (ВИР);
Vt - тангенциальная составляющая скорости цели.
Полученные величины параметров движения цели - скорость и курс цели поступают далее в устройство классификации цели системы ГЛ.
Выполненный анализ показал, что при использовании предлагаемого изобретения за один цикл излучения-приема скорость цели может быть определена с относительной среднеквадратической ошибкой примерно 20%, курс цели - со среднеквадратической ошибкой примерно 20°, что является приемлемым для классификации обнаруженной цели в системе ГЛ.
Таким образом, определение скорости и курса обнаруженной цели за один цикл излучения-приема системы активной гидролокации гидроакустической станции с приемлемой для классификации точностью достигается путем обеспечения возможности определения величины общей тангенциальной составляющей скорости и тангенциальной составляющей скорости цели за счет использования величины ВИП от системы ШП ГАС, величины дистанции до цели от системы ГЛ ГАС, величины пеленга на цель от системы ШП ГАС, величины скорости и курса корабля-носителя ГАС и далее обеспечения возможности определения скорости и курса обнаруженной цели за счет использования ВИР от системы ГЛ ГАС и выработанной тангенциальной составляющей скорости цели.
Практическое исполнение блоков, входящих в изобретение, известно из практики гидроакустики.
Блоки 14, 16, 17 и 18 могут быть реализованы на основе технических решений, приведенных в книге "Проектирование импульсных и цифровых устройств радиотехнических систем". /Цифровые радионавигационные устройства / В.В.Барашнеков, А.Е.Лутченко, Е.М.Скороходов и др.; под ред. В.Б.Смолова. - М.: Сов.радио, 1980, с. 196-200.
Таким образом, поставленная задача успешно решается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения цели гидролокатором | 2017 |
|
RU2658528C1 |
| Активный гидролокатор | 2017 |
|
RU2654366C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СИСТЕМА ГИДРОЛОКАЦИИ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2011 |
|
RU2458357C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ СУДОВ | 2015 |
|
RU2584355C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| Способ определения координат и параметров движения подводных объектов при мультистатической гидролокации | 2024 |
|
RU2830066C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681526C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов. Техническим результатом изобретения является обеспечение возможности определения скорости и курса обнаруженной цели за один цикл излучения - приема с приемлемой для классификации цели точностью. Система активной гидролокации гидроакустической станции (ГАС) содержит излучающую 1 и приемную 2 акустические антенны, устройство 5 формирования зондирующего сигнала, устройство 4 формирования характеристик направленности в излучении, генераторное устройство 3, устройство 6 формирования характеристик направленности системы гидролокации (ГЛ) в приеме и устройство 7 обработки эхосигналов от цели, устройство 10 формирования характеристик направленности системы шумопеленгования (ШП), устройство 11 обработки сигналов системы ШП, устройство 12 измерения пеленга на цель системы ШП и блок 13 определения величины изменения пеленга (ВИЛ), устройство 8 измерения дистанции до цели, устройство 9 измерения радиальной составляющей скорости цели (ВИР), блок 15 связи ГАС с системами корабля, блок 14 определения общей тангенциальной составляющей скорости и блок 16 определения тангенциальной составляющей скорости цели, также содержит блок 17 определения скорости цели и блок 18 определения курса цели. 1 ил.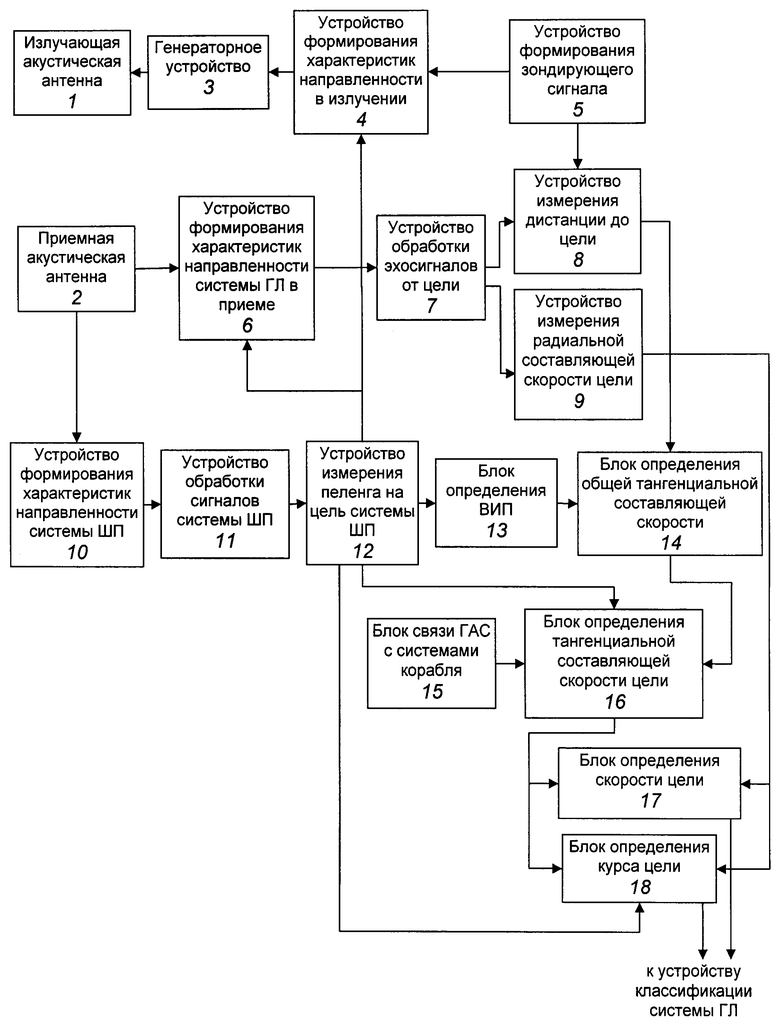
Система активной гидролокации гидроакустической станции (ГАС), содержащая излучающую и приемную акустические антенны, последовательно соединенные устройство формирования зондирующего сигнала, устройство формирования характеристик направленности в излучении, генераторное устройство, последовательно соединенные устройство формирования характеристик направленности системы гидролокации (ГЛ) в приеме и устройство обработки эхосигналов от цели, также содержащая устройство измерения дистанции до цели, устройство измерения радиальной составляющей скорости цели (ВИР), последовательно соединенные устройство формирования характеристик направленности системы шумопеленгования (ШП), устройство обработки сигналов системы ШП, устройство измерения пеленга на цель системы ШП и блок определения величины изменения пеленга (ВИЛ), также содержащая последовательно соединенные блок определения общей тангенциальной составляющей скорости и блок определения тангенциальной составляющей скорости цели, также содержащая блок определения скорости цели, блок определения курса цели и блок связи ГАС с системами корабля, причем выход генераторного устройства соединен с излучающей акустической антенной, второй выход устройства формирования зондирующего сигнала соединен со вторым входом устройства измерения дистанции до цели, первый вход устройства формирования характеристик направленности системы ГЛ в приеме и вход устройства формирования характеристик направленности системы ШП соединены с приемной акустической антенной, первый и второй выходы устройства обработки эхосигналов от цели соединены с первым входом устройства измерения дистанции до цели и со входом устройства измерения радиальной составляющей скорости цели соответственно, второй выход устройства измерения пеленга на цель системы ШП соединен со вторым входом устройства формирования характеристик направленности в излучении и вторым входом устройства формирования характеристик направленности системы ГЛ в приеме, выход устройства измерения дистанции до цели соединен с первым входом блока определения общей тангенциальной составляющей скорости, второй вход которого соединен с выходом блока определения ВИЛ, третий выход устройства измерения пеленга на цель системы ШП соединен со вторым входом блока определения тангенциальной составляющей скорости цели, третий вход которого соединен с выходом блока связи ГАС с системами корабля, выход блока определения тангенциальной составляющей скорости цели соединен с первыми входами блока определения скорости цели и блока определения курса цели, выход устройства измерения радиальной составляющей скорости цели соединен со вторыми входами блока определения скорости цели и блока определения курса цели, четвертый выход устройства измерения пеленга на цель системы ШП соединен с третьим входом блока определения курса цели.
| Способ укладки железнодорожного пути | 1948 |
|
SU75060A1 |
| КОРАБЕЛЬНАЯ ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2173865C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| Приспособление для удаления сердцевины из баклажана | 1930 |
|
SU20394A1 |
| JP 6347538 A, 22.12.1994. | |||

