Изобретение относится к области авиационной техники и может быть использовано на летательных аппаратах (ЛА), группе ЛА и при взаимодействии ЛА с наземным пунктом управления (НПУ) для формирования целевой обстановки радиоизлучающих целей (РИЦ) и оценки их местоположения в интересах применения авиационных средств поражения (АСП), разведки и для обеспечения информацией систем подавления РИЦ.
На современных боевых летательных аппаратах в зависимости от их назначения источниками информации о РИЦ могут быть системы радиотехнической разведки (РТР), широкополосная пассивная головка самонаведения (ШГТРГС) и комплекс средств связи ОСНОД (объединенная система связи, обмена данными, навигации и опознавания) обеспечивающих поступление и обработку информации от взаимодействующих ЛА, наземных пунктов управления, пунктов управления воздушного базирования.
Основным методом определения местоположения РИЦ по информации системы РТР или нескольких пеленгаторов, которыми могут быть в том числе взаимодействующие ЛА, является метод триангуляции (Мельников Ю.П. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. Радиотехника, 2008). Для одиночного ЛА обязательным условием является движение ЛА таким образом, чтобы пеленг на РИЦ изменялся во времени. Также при наличии измерения азимута и угла места местоположение определяется угломестным способом (Мельников Ю.П. Воздушная радиотехническая разведка (методы оценки эффективности), Радиотехника, 2005).
На самолетах поколений 4+ и 4++ установлена аппаратура и применяются алгоритмы, которые обеспечивают определение дальности до захваченной РИЦ на основе угловых измерений пассивной радиолокационной головкой самонаведения (ПРГС) азимутальным либо угломестным способом.
Основными недостатками приведенного способа являются: независимая обработка информации от каждого источника, которая увеличивает вероятность размножения целей, обнаруженных разными системами, низкая достоверность информации о реальных целях и увеличенное время экстраполяции между замерами.
Из уровня техники также известны следующие способы определения местоположения целей:
Способ триангуляции целей (патент RU 2423720, опубл. 10.07.2011, МПК G01S 5/00).
Способ определения координат источника радиоизлучения (патент RU 2339966, опубл. 27.11.2008, МПК G01S 5/00).
Способ и устройство определения координат источника радиоизлучения (Патент RU 2419106, опубл. 20.05.2011, МПК G01S 13/46).
Недостатком указанных изобретений является относительная низкая точность определения местоположения источника радиоизлучения (ИРИ) в связи с тем, что используется связка антенной системы и обработки сигнала ИРИ без учета пространственного положения носителя. Еще одним существенным недостатком приведенных способов является невозможность определения координат ИРИ с помощью одного измерителя.
Задачей предложенного изобретения является совершенствование уровня техники, а также обеспечение выделения в сложной информационной обстановке (пропуски в потоке данных и неоднозначность измерений, ложные измерения, преднамеренные помехи и т.д.) по системам РТР, ШПРГС, КСС достоверной информации (информации о реальных РИЦ, а не ложных) по РИЦ, формирование трассы (набора параметров, характеризующих местоположение РИЦ, траекторию движения РИЦ (для морских РИЦ), которые могут включать координаты цели, радиотехнический паспорт, идентификационные признаки, источники информации, признаки отождествления и т.д.) в том числе данных об ошибках определения координат с определением координат РИЦ за счет комплексного подхода к вычислениям (применение азимутального (кинематического), угломестного, и триангуляционного методов определения местоположения РИЦ), а также обеспечение обмена и обработки информации (в том числе расчета дальности до РИЦ триангуляционным методом) по РИЦ в группе ЛА (групповая радиотехническая разведка) по каналам объединенной системы связи, обмена данными, навигации и опознавания (ОСНОД), формирования массива попутной радиотехической разведки (ПРТР) и выдачи его на НПУ. При этом массив ПРТР может включать такие данные, как тип объекта, дальность до объекта, ошибка дальности до объекта, азимут, координаты, вид сигнала, время последнего замера, сопровождаемая цель, разведанная цель и др.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в повышении точности и скорости оценки местоположения РИЦ с заданной гарантированной точностью, а также в сокращении времени формирования данной оценки.
Под оценкой гарантированной точности понимается максимальная норма геометрических размеров области допустимых оценок координат (дальности) РИЦ, с учетом воздействия на измерительные тракты пассивных радиотехнических систем всей возможной совокупностью возмущающих воздействий (немоделируемых возмущений) в произвольных сочетаниях.
Приведенный технический результат достигается настоящим изобретением. Способ трассирования наземных и морских радиоизлучающих целей включает поступление информации о радиоизлучающих целях (РИЦ) от системы радиотехнической разведки (РТР) и широкополосной пассивной головки самонаведения (ШПРГС) в блок трассового сопровождения объектов (ТРСО) и в блок обработки информации ШПРГС, в которых выполняется преобразование полученной информации в стандартный пеленг измерения, по которому производится дальнейший отбор и привязка измерения к той или иной гипотезной трассе сопровождаемого объекта с указанием числа измеряемых координат, формирование аналогичной трассы для нумерованных измерений, не попадающих в стробы отбора ни одной из гипотезных трасс соответствующего сопровождаемого объекта, либо если таковых трасс не найдено в блоке ТРСО производится формирование новой трассы, фильтрация гипотезными фильтрами, постановка на сопровождение нового объекта по каждому стандартному пеленгу измерения из зон захвата, экстраполяция гипотезных трасс каждого сопровождаемого объекта, формирование выходных трасс и оценка гарантированной точности определения дальности, при этом при взаимодействии по каналам связи с другими самолетами информация о РИЦ поступает по меньшей мере от одного взаимодействующего летательного аппарата (ЛА) по каналам связи комплекса средств связи (КСС) в блок обработки информации о РИЦ группы ЛА (ОРГ), блок ТРСО обеспечивает блок ОРГ информацией по сопровождаемым РИЦ, а информация о РИЦ в виде пакетов данных по меньшей мере от одного взаимодействующего самолета по КСС поступает в ОРГ, где выполняется распаковка и обработка данных, включающая отождествление с сохранением привязки каждой РИЦ к борту - источнику информации о РИЦ и определение расчетной дальности до наземных РИЦ методом триангуляции, при этом полученные результаты выдаются в блок ТРСО, наземным пунктам управления и, по меньшей мере, одному взаимодействующему ЛА в целях обеспечения разведки или применения АСП.
Одной из задач трассирования наземных РИЦ является определение дальности до РИЦ азимутальным (кинематическим) либо угломестным способом на основе угловых измерений РТР и/или ШПРГС на фоне текущего полета. Для повышения точности расчета дальности до РИЦ используется определение местоположения РИЦ азимутальным методом при выполнении ЛА специального маневра типа «логарифмическая спираль». После уточнения местоположение РИЦ путем выполнения специального маневра достигаются точности по дальности, позволяющие применять ШПРГС.
В представленном способе трассирования НРИЦ учитывается положение ЛА в пространстве (курс, крен, тангаж), угловая скорость азимута на РИЦ, учитываются ошибки измерения и время задержки указанных параметров, что позволяет повысить точность местоположения РИЦ за счет более полного и объективного измерения пространственных параметров.
Способ может использоваться для обеспечения задач радиотехнической разведки, применения авиационных средств поражения с ШПРГС и для обеспечения задач обороны ЛА. При выполнении ЛА боевого вылета на каждом этапе полета выполняется по меньшей мере одна из указанных задач. При выполнении полета по маршруту при наличии информации по РИЦ от системы РТР на фоне выполнения текущего этапа полета ведется обработка параметрической информации о РИЦ от РТР, а также при наличии информации от взаимодействующего/взаимодействующих ЛА одновременно обрабатывается информация о РИЦ, полученная по каналам комплекса средств связи между ЛА. При обнаружении заданного объекта (цели) и обнаружении данного объекта ШПРГС, обрабатываемая ранее информация дополняется информацией от ШПРГС.
Предлагаемый способ обеспечивает формирование набора параметров сопровождаемого объекта (цели) по имеющейся на борту самолета информации, характеризующих его местоположение, траекторию движения, ошибки по определению координат (трасса). Формирование трассы может включать следующие параметры - координаты цели, радиотехнический паспорт, идентификационные признаки, источники информации, признаки отождествления и другие данные. Также способ обеспечивает формирование гипотезной трассы - трассы, соответствующей определенной гипотезе местоположения объекта, которая определяется вероятностью этой гипотезы, вектором оценок местоположения объекта и ковариациями оценок местоположения. С помощью гипотезных трасс выполняются все основные процессы сопровождения цели: захват цели по одному измерению, привязка измерения к той или иной гипотезной трассе сопровождаемого объекта с указанием числа измеряемых координат, формирование аналогичной трассы для измерений не попадающих в стробы отбора (угловой сектор базового азимута трассы, при попадании измерения в который, данный замер можно считать принадлежащим к трассе) ни одной из гипотезных трасс соответствующего сопровождаемого объекта (ассоциация), обработка всех измерений и экстраполяция оценок координат местоположения.
Источниками информации по РИЦ на самолете являются системы РТР, ШПРГС, КСС. При этом каждый источник информации (РТР, ШПРГС, КСС) измеряет и выдает определенный набор информации. РТР измеряет и выдает азимут и радиотехнические параметры, ШПРГС - азимут, угол места и радиотехнические параметры, КСС - информацию по местоположению и радиотехнические параметры.
При поступлении информации от РТР и ШПРГС в блок трассового сопровождения объектов (ТРСО) и в блок обработки информации ШПРГС где выполняется преобразование полученной информации в стандартный пеленг измерения, по которому производится дальнейший отбор и привязка измерения к той или иной гипотезной трассе сопровождаемого объекта (цели) с указанием числа измеряемых координат формирование аналогичной трассы для нумерованных измерений не попадающих в стробы отбора ни одной из гипотезных трасс соответствующего сопровождаемого объекта, либо если таковых трасс не найдено производится формирование новой трассы, фильтрация гипотезными фильтрами, постановка на сопровождение нового объекта по каждому стандартному пеленгу измерения из зон захвата (массив пеленгов, по которым формируется новая трасса), экстраполяция гипотезных трасс каждого сопровождаемого объекта, формирование выходных (итоговых трасс для потребителей) трасс и оценка гарантированной точности определения дальности. Под гипотезным фильтром понимается фильтр сопровождения траектории, предусматривающий возможность привязки к сопровождаемой траектории больше одной отметки в обзоре, обеспечивая, тем самым, возможность завязки нескольких новых траекторий. Со временем сопровождаемая траектория может разветвляться на несколько отдельных траекторий, ориентированных в разных направлениях. Такой алгоритм может решать и противоположную задачу - привязку одной отметки к нескольким сопровождаемым траекториям. Подобная ситуация может возникать, когда траектории нескольких объектов сходятся к общему пункту назначения.
При наличии взаимодействующего/взаимодействующих ЛА по каналам связи КСС поступает информация о РИЦ от взаимодействующих ЛА, при этом блок ТРСО обеспечивает блок обработки РИЦ группы ЛА (ОРГ) информацией по сопровождаемым РИЦ. Информация о РИЦ в виде пакетов данных от группы самолетов по КСС поступает в ОРГ, где выполняется распаковка и обработка данных, отождествление (процедура принятия решения о том, что замер принадлежит трассе) с сохранением привязки каждой РИЦ к борту -источнику и определяется расчетная дальность до наземных РИЦ методом триангуляции. Далее результаты выдаются в блок ТРСО и потребителям (НПУ, взаимодействующие ЛА) в целях разведки или применения АСП.
Приведенными выше блоками может осуществляться в том числе следующая обработка данных в следующей последовательности:
1. Преобразование каждого пеленга измерения, полученного от собственных источников информации (РТР, ШПРГС, КСС) самолета в стандартный пеленг измерения (азимут, угол места) нормальной подвижной системы координат (НПСК) с указанием источника, числа измеряемых координат, идентификатора и параметров принимаемого излучения.
2. Отбор стандартных пеленгов измерения в гипотезные трассы сопровождаемых объектов с записью неотобранных стандартных пеленгов в первую зону захвата.
3. Ассоциация отобранных стандартных пеленгов измерения с гипотезными трассами с записью неассоциированных стандартных пеленгов измерения во вторую зону захвата.
4. Фильтрация ассоциированных стандартных пеленгов измерения гипотезными фильтрами второго порядка с расчетом апостериорных вероятностей гипотезных трасс, оценок всех координат и скоростей и оценок их стандартных ошибок.
5. Захват на сопровождение нового объекта по каждому стандартному пеленгу измерения из зон захвата путем формирования его внутренней трассы и ее начального набора гипотезных трасс (захват на сопровождение производится по одному первому стандартному пеленгу измерения. Значение неизмеряемых координат задаются в виде гипотез местоположения).
6. Экстраполяция гипотезных трасс каждого сопровождаемого объекта под текущее время и время очередного замера его пеленгов.
7. Формирование зоны выходных трасс.
Заявленное изобретение поясняется чертежами:
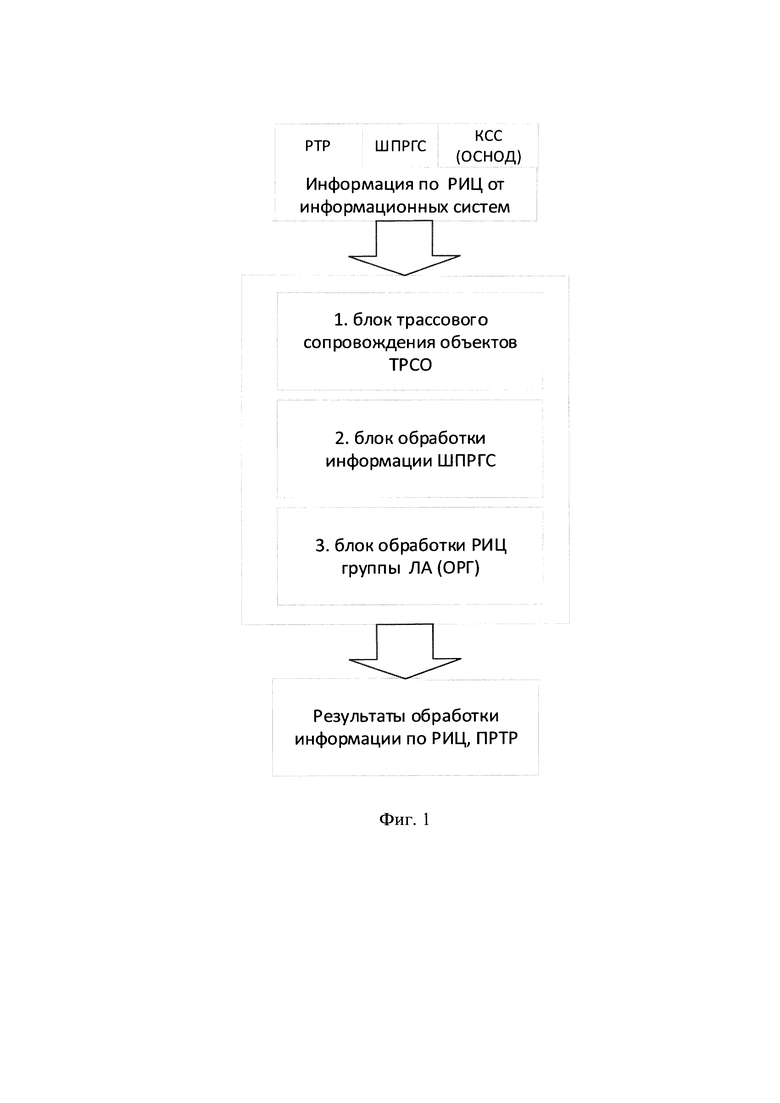
На фиг. 1 представлена схема приема и обработки информации о РИЦ для формирования целевой обстановки РИЦ и определения их местоположения (координат) в интересах применения АСП или разведки.
На фиг. 1 позициями обозначены следующие блоки предлагаемого способа трассирования наземных или морских РИЦ: 1 - блок трассового сопровождения объектов, 2 - блок обработки информации ШПРГС, 3 - блок обработки РИЦ группы ЛА (ОРГ).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ ОДНОКООРДИНАТНОЙ ПЕЛЕНГАЦИИ В СВЯЗАННОЙ СИСТЕМЕ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834277C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| Способ определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса и устройство для его осуществления | 2020 |
|
RU2757197C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| Бортовая интеллектуальная система поиска и наведения беспилотного летательного аппарата | 2023 |
|
RU2819590C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО РАДИОИЗЛУЧАЮЩЕГО ОБЪЕКТА | 2020 |
|
RU2739060C1 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
Изобретение относится к области авиационной техники. Технический результат заключается в повышении точности и скорости оценки местоположения радиоизлучающих целей (РИЦ) с заданной гарантированной точностью, а также сокращении время формирования данной оценки. Заявленный способ включает поступление информации о радиоизлучающих целях от системы радиотехнической разведки (РТР) и широкополосной пассивной головки самонаведения (ШПРГС) в блок трассового сопровождения объектов (ТРСО) и в блок обработки информации ШПРГС, в которых выполняется преобразование полученной информации в стандартный пеленг измерения, по которому производится дальнейший отбор и привязка измерения к той или иной гипотезной трассе сопровождаемого объекта. При этом при взаимодействии по каналам связи с другими самолетами информация о РИЦ поступает по меньшей мере от одного взаимодействующего летательного аппарата (ЛА) в блок обработки информации о РИЦ группы ЛА (ОРГ). Блок ТРСО обеспечивает блок ОРГ информацией по сопровождаемым РИЦ, а информация о РИЦ по меньшей мере от одного взаимодействующего самолета по КСС поступает в ОРГ, где выполняется отождествление с сохранением привязки каждой РИЦ к борту - источнику информации о РИЦ и определение расчетной дальности до наземных РИЦ методом триангуляции. Полученные результаты выдаются в блок ТРСО, наземным пунктам управления и взаимодействующему ЛА в целях обеспечения разведки или применения авиационных средств поражения. 1 ил.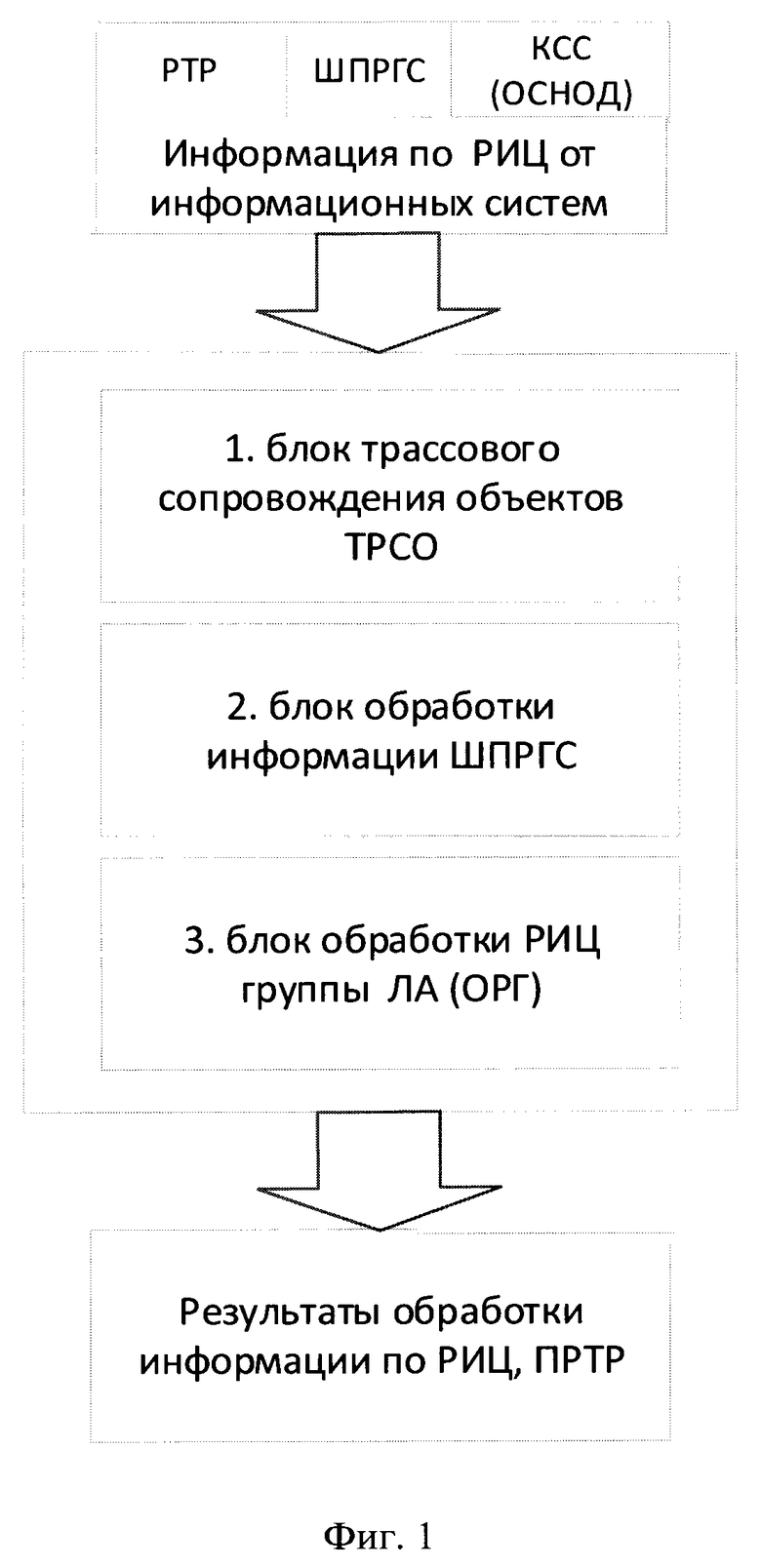
Способ трассирования наземных и морских радиоизлучающих целей, включающий поступление информации о радиоизлучающих целях (РИЦ) от системы радиотехнической разведки (РТР) и широкополосной пассивной головки самонаведения (ШПРГС) на летательный аппарат (ЛА) в блок трассового сопровождения объектов (ТРСО) и в блок обработки информации ШПРГС, в которых выполняют преобразование каждого пеленга измерения, полученного от системы РТР, ШПРГС и комплекса средств связи (КСС) ЛА, в пеленг измерения нормальной подвижной системы координат (НПСК) с указанием источника информации, числа измеряемых координат, идентификатора и параметров принимаемого излучения, по пеленгу измерения НПСК производят дальнейший отбор и привязку измерения к одной из гипотезных трасс сопровождаемого объекта с указанием числа измеряемых координат, формирование аналогичной трассы для измерений, не попадающих в стробы отбора ни одной из гипотезных трасс соответствующего сопровождаемого объекта, либо, если таковых трасс не найдено, в блоке ТРСО производят формирование новой трассы, фильтрацию гипотезными фильтрами, постановку на сопровождение нового объекта по каждому пеленгу измерения НПСК из зон захвата, экстраполяцию гипотезных трасс каждого сопровождаемого объекта, формирование выходных трасс и оценку гарантированной точности определения дальности как максимальной нормы геометрических размеров области допустимых оценок дальности РИЦ с учетом воздействия на измерительные тракты пассивных радиотехнических систем совокупности возмущающих воздействий, при этом при взаимодействии по каналам связи с другими ЛА информация о РИЦ поступает по меньшей мере от одного взаимодействующего летательного аппарата (ЛА) по каналам связи комплекса средств связи объединенной системы связи, обмена данными, навигации и опознавания (ОСНОД) в блок обработки информации о РИЦ группы ЛА (ОРГ), блок ТРСО обеспечивает блок ОРГ информацией по сопровождаемым РИЦ, а информация о РИЦ в виде пакетов данных по меньшей мере от одного взаимодействующего ЛА по КСС поступает в ОРГ, где выполняют распаковку и обработку данных, включающую отождествление с сохранением привязки каждой РИЦ к борту – источнику информации о РИЦ и определение расчетной дальности до наземных РИЦ методом триангуляции, при этом полученные результаты выдаются в блок ТРСО, наземным пунктам управления и по меньшей мере одному взаимодействующему ЛА для обеспечения разведки или применения авиационных средств поражения.
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели (варианты) и радиолокационный комплекс для его осуществления (варианты) | 2017 |
|
RU2663226C1 |
| СПОСОБ ТРИАНГУЛЯЦИИ ЦЕЛЕЙ | 2010 |
|
RU2423720C1 |
| Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке | 2020 |
|
RU2752863C1 |
| US 2020292692 A1, 17.09.2020 | |||
| CN 103675808 A, 26.03.2014 | |||
| WO 2018130634 A1, 19.07.2018. | |||

