Предлагаемый радиолокационный маяк-ответчик (РЛМО) относится к области радиолокационных и радионавигационных систем с активным ответом и предназначен, в частности, для маркирования точек десантирования с целью обеспечения прицельного выхода на РЛМО значительного количества самолетов-запросчиков при высоких мгновенных плотностях потока запросных сигналов.
В современных условиях имеется необходимость одновременного вывода в маркируемую РЛМО точку десантирования нескольких десятков самолетов-запросчиков, поскольку боевые действия осуществляются в основном в составе авиационного полка или дивизии, что составляет 20 и более самолетов.
При этом маяк-ответчик подвергается воздействию нестационарного потока запросных сигналов от самолетов запросчиков, характеризуемого высокими мгновенными плотностями потока.
Из известных РЛМО наиболее близким по технической сущности является изделие E-811, выбранное в качестве прототипа.
Радиолокационный маяк-ответчик состоит из последовательно соединенных приемной антенны, приемника, дешифратора, шифратора, передатчика и передающей антенны, а также генератора импульса парализации Тп, вход которого подключен к выходу дешифратора, а выход ко второму входу дешифратора.
Принцип работы маяка-ответчика заключается в следующем.
Запросные кодированные импульсные сигналы, излученные запросчиком, через приемную антенну и приемник, поступают на обработку в дешифратор для декодирования. Если в результате декодирования оказывается, что поступивший сигнал требует ответа, то поступает команда на шифратор для выработки кодированного импульсного сигнала, который через передатчик и передающую антенну излучается в окружающее РЛМО пространство.
Команда, включающая в работу шифратор, запускает также генератор импульса парализации Тп, который формирует сигнал запрета на декодирование поступающих на вход РЛМО запросных сигналов в течение времени парализации Тп. Время парализации выбрано из соображений ограничения средней рассеиваемой мощности в передатчике.
Так как длительности τи ответных импульсов РЛМО известны, то

где Ри - мощность, рассеиваемая за время одного импульса.
Тогда условием выбора времени парализации является выполнение требования
Рср<Рср доп
где Рср доп - допустимая средняя мощность рассеивания в передатчике.
Откуда

Зависимости ответности (отношения количества ответных сигналов РЛМО к количеству запросных сигналов) РЛМО, построенного по такой схеме, от количества запрашивающих его самолетов приведены на графике рис.37 в книге "Импульсные радионавигационные устройства" под ред. Дьякова (М., Воениздат, 1955).
Малогабаритные переносные РЛМО, используемые для целей десантирования, имеют ограниченные энергетические возможности, как по средней мощности, так и по мощности потребляемой от обычно используемых аккумуляторных батарей, что ограничивает минимальное среднее время парализации.
Недостатком схемы построения прототипа является то, что в нем отсутствует адаптация к нестационарному случайному потоку запросных сигналов, что приводит к практической недостижимости реальной величиной рассеиваемой мощности допустимой величины Рср доп, т.е. происходит постоянное недоиспользование энергетических возможностей РЛМО.
С другой стороны, стремление ограничить таким путем среднюю рассеиваемую в передатчике мощность приводит к тому, что время парализации Тп приходится делать достаточно большим (например, в изделии Е-811 Тп=800 мкс). При этом высока вероятность попадания запросных сигналов во время парализации РЛМО за счет предыдущего ответа другому запросчику, что приводит к снижению средней ответности РЛМО.
Поскольку требуется вывести в точку десантирования значительное количество самолетов-запросчиков, которые обычно оборудованы идентичной аппаратурой, т.е. имеют одинаковые и кварцованные периоды повторения запросных сигналов, а также одинаковые и стабилизированные угловые скорости сканирования диаграмм направленности запросных антенн, то попадание запросного сигнала одного запросчика на интервал Тп, в течение которого РЛМО закрыт другим запросчиком оказывается повторяющимся в течение длительного времени, определяемого разностью периодов повторения запросных сигналов и угловых скоростей сканирования антенны этих двух запросчиков, а также задержкой времени прихода второго запросного сигнала относительно первого, на который РЛМО отвечает.
Это явление приводит к длительным пропаданиям ответных сигналов - "захвату" РЛМО одним из запросчиков на некоторое время (см. "Импульсные радионавигационные устройства", под ред. Дьякова стр.95, М., Министерство обороны, 1955).
Как показали проведенные испытания, при полете 20 самолетов пропадания ответных сигналов из-за "захвата" достигают 1-5 мин (Акт испытаний изделия Е-811, инв. 14003).
При современных скоростях полета самолета столь длительное пропадание ответного сигнала недопустимо, т.к. ставит штурмана, в стрессовую обстановку и срывает выполнение десантирования.
Целью настоящего изобретения является обеспечение адаптации РЛМО к условиям переменной загрузки его потоком запросных сигналов запросчиков, что приводит к соответствующему повышению ответности и значительному уменьшению времени "захвата" РЛМО одним из запросчиков.
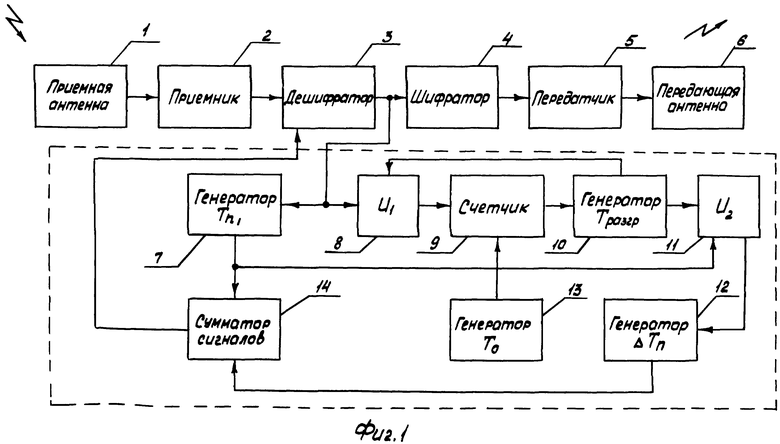
Поставленная цель достигается тем, что в радиолокационный маяк-ответчик, включающий соединенные последовательно приемную антенну, приемник, дешифратор, шифратор, передатчик и передающую антенну, введены последовательно соединенные схема И1, счетчик, генератор времени разгрузки Тразгр, схема И2, генератор приращения времени парализации ΔТп и сумматор сигналов, а также генератор импульса парализации 

Введение перечисленных устройств обеспечивает адаптацию РЛМО к условиям переменной загрузки потоком запросных сигналов за счет того, что при низких потоках запросных сигналов время парализации РЛМО определяется сигналом запрета малой длительности, формируемым генератором импульса парализации

За счет этого повышается ответность РЛМО и значительно снижается вероятность "захвата" РЛМО одним из запросчиков на длительное время.
На фиг.1 представлена блок-схема заявляемого радиолокационного маяка-ответчика.
Радиолокационный маяк-ответчик содержит приемную антенну 1, приемник 2, дешифратор 3, шифратор 4, передатчик 5, передающую антенну 6, генератор импульса парализации
Работа предлагаемого радиолокационного маяка-ответчика происходит следующим образом.
Кодированные запросные сигналы от запросчика поступают через приемную антенну 1 и приемник 2 на дешифратор 3, где декодируются. Продекодированные сигналы формируют импульсы, запускающие шифратор 4, который формирует кодированные сигналы ответа, модулирующие передатчик 5, и высокочастотные сигналы с передатчика 5 излучаются через передающую антенну 6 в окружающее пространство.
С дешифратора 3 запускающие импульсы поступают также на генератор импульса парализации
Импульсы с дешифратора 3 определяют поток запросных сигналов от запросчиков. Поэтому их количество за конечное время является характеристикой текущей плотности потока. Для определения плотности потока импульсы с дешифратора поступают на периодически обнуляемый счетчик 9. Обнуление счетчика 9 происходит за счет периодических импульсов обнуления, поступающих на него с генератора импульсов обнуления Т0 13.
Емкость счетчика N и период следования импульсов обнуления Т0 находятся в таком соответствии, что
где Тп пред - предельное среднее время парализации, допустимое энергетическими и тепловыми характеристиками РЛМО.
То есть необходимо, чтобы среднее время между ответными импульсами внутри интервала Т0 было больше предельного времени парализации Тп пред, при этом время парализации маяка после каждого ответного импульса будет мало и равно
С другой стороны, интервал Т0 должен быть достаточен, чтобы РЛМО мог обеспечить максимальную ответность на мгновенный значительный поток запросных сигналов при низкой средней плотности потока, т.е. мог пропустить несколько пачек запросных сигналов от различных запросчиков при малом времени парализации
Если за время Т0 между двумя импульсами обнуления счетчик заполнится до величины N, то в нем вырабатывается импульс для запуска генератора времени разгрузки Тразгр 10, который формирует импульс, длительность которого определяет время разгрузки Тразгр передающего устройства, в течение которого РЛМО работает с временем парализации 
На время этого импульса открывается схема И2 11 и закрывается схема И1 8.
Тогда счетчик оказывается закрытым на указанное время, а генератор ΔТп 12 запускается задним фронтом импульса, формируемого генератором
Импульсы, формируемые генераторами 7, 12, суммируются в сумматоре сигналов 14 и с его выхода поступают на дешифратор, парализуя РЛМО на время Тп.
По окончании времени разгрузки Тразгр открывается схема И1 и запрещается запуск генератора ΔТп через схему И2 импульсами с генератора
При этом на выходе сумматора имеется только сигнал парализации РЛМО длительностью
Если за время между импульсами обнуления Т0 счетчик не успевает насчитать N импульсов запроса, то он обнуляется и счет происходит сначала.
При этом генератор ΔТп не включается и время парализации РЛМО определяется только временем
Время разгрузки выбрано из условия выполнения неравенства

Испытания показали, что обеспечивается адаптация РЛМО к потоку запросных сигналов строя из 20 самолетов ИЛ-76. Ответные сигналы РЛМО устойчиво наблюдались на всех 20 самолетах, "захваты" РЛМО отсутствовали. Одновременно проведенные испытания неадаптирующегося серийного маяка-ответчика Е-811 показали, что он обеспечивает одновременную работу только с 5-7 самолетами.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ МАЯК-ОТВЕТЧИК | 1975 |
|
SU1840870A1 |
| Радиолокационный маяк-ответчик (РЛМО) с передачей координат в цифровом виде | 2021 |
|
RU2762231C1 |
| Вторичная радиолокационная система | 1980 |
|
SU854163A1 |
| Бортовая приемо-запросная аппаратура (БПЗА) | 2021 |
|
RU2762140C1 |
| РАДИОЛОКАЦИОННЫЙ ОТВЕТЧИК | 2007 |
|
RU2343501C1 |
| СИСТЕМА ОПОЗНАВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2254596C2 |
| РАДИОЛОКАЦИОННЫЙ МАЯК-ОТВЕТЧИК СО ВСТРОЕННЫМ КОНТРОЛЕМ | 1974 |
|
SU1840863A1 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК | 2002 |
|
RU2234109C1 |
| Вторичная радиолокационная система | 1985 |
|
SU1309754A1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННО-ПИЛОТАЖНОЙ ИНФОРМАЦИИ ДЛЯ СУДОВ И ОТВЕТЧИК | 1993 |
|
RU2075763C1 |
Изобретение относится к области радиолокационных и радионавигационных систем с активным ответом. Достигаемый технический результат - повышение пропускной способности ответчика. Указанный результат достигается за счет того, что радиолокационный ответчик содержит приемную антенну, приемник, дешифратор, шифратор, передатчик, передающую антенну, генератор импульсов парализации, первый элемент И, счетчик с начальной установкой кода, генератор импульсов разгрузки, второй элемент И, генератор импульсов приращения парализации, элемент НЕ, генератор импульсов обнуления, сумматор. Перечисленные средства соединены между собой определенным способом. 1 ил.
Радиолокационный ответчик, содержащий последовательно соединенные приемную антенну, приемник, дешифратор, шифратор, передатчик, передающую антенну, а также генератор импульсов парализации, вход которого подключен к выходу дешифратора, а выход связан с управляющим входом дешифратора, отличающийся тем, что, с целью повышения пропускной способности ответчика, в него дополнительно введены последовательно соединенные первый элемент И, счетчик с начальной установкой кода, генератор импульсов разгрузки, второй элемент И, генератор импульсов приращения парализации, причем первый вход первого элемента И соединен с выходом дешифратора, а второй вход второго элемента И - с выходом генератора импульсов парализации, кроме того, дополнительно введены элемент НЕ, включенный между выходом генератора импульсов разгрузки и вторым входом первого элемента И, генератор импульсов обнуления, выход которого подключен ко входу управления сбросом счетчика с начальной установкой кода, а выход генератора импульсов парализации связан с управляющим входом дешифратора через дополнительно введенный сумматор, ко второму входу которого подключен выход генератора импульсов приращения парализации.
| Импульсные радионавигационные устройства | |||
| Под ред | |||
| Д.Д | |||
| Дьякова, М., Воениздат, 1955 г., стр.10. |

