Предлагаемое изобретение относится к области радиотехники, в частности, к аппаратуре обнаружения и измерения параметров импульсных радиосигналов при пассивной разведке источников излучения и может быть использовано в станциях радиотехнической разведки и пассивного целеуказания.
В настоящее время в станциях радиотехнической разведки и пассивного целеуказания широко применяют поисковый метод обзора по частоте с использованием двух видов поиска:
- равномерного, с анализом ″на проходе″, при котором время приема tп на каждой частотной градации равно необходимому для обнаружения и анализа нескольких (М) импульсов и связано с максимальным периодом следования Tсм сигнала соотношением
tп=МTcм;
- неравномерного: с обнаружением ″на проходе″ и остановкой для анализа принимаемой последовательности сигналов, с частотным поиском по заранее определенному алгоритму.
Приведенные методы частотного поиска не позволяют в полной мере удовлетворить два противоречивых требования к средствам радиотехнической разведки и пассивного целеуказания, а именно: с одной стороны - обеспечить высокое быстродействие, необходимое для обнаружения кратковременных (0,05…0,1 сек) последовательностей импульсов, излучаемых по главному лепестку ДН, для чего необходимо иметь минимальное время приема и обработки каждого из разведуемых излучений; с другой стороны - производить точное измерение пеленга и параметров излучения, в том числе характеристик последовательности (пачки), например, огибающей пачки, длительности облучения главным лепестком, для чего необходимо осуществлять прием и обработку максимально возможного числа импульсов каждого из разведуемых излучений.
Данные о тонкой структуре пачки в ряде случаев дают возможность решать задачи различения однотипных РЛС (см., например, В.А. Балаба и др. ″Экспериментальные исследования законов вобуляции временных параметров сигналов РЛС цифровыми устройствами″. Вопросы кораблестроения, серия ″Вычислительная техника″, Вып. 13, 1979 г.)
Из вышесказанного можно сделать вывод, что для одновременного выполнения требований по обеспечению высокой вероятности обнаружения (быстродействия) при приеме кратковременных последовательностей, излучаемых по главному лепестку РЛС, и увеличения точности измерения параметров принятых сигналов необходимо применять специальные методы (устройства) управления частотным поиском гетеродина.
Известны технические решения, в которых реализованы различные режимы управления частотным поиском.
В системе поиска-захвата сигнала (патент США №3675132, 1972 г., МКИ: H04B 1/26) принятый высокочастотный сигнал смешивается с выходным сигналом местного гетеродина, настраиваемого напряжением для получения сигнала промежуточной частоты, одновременно подаваемого на частотный дискриминатор и в блок оперативного запоминающего устройства.
Управляющее напряжение для генератора формируется блоком АПЧ, в котором имеется интегратор, на выход которого подается селектируемое постоянное напряжение.
В режиме поиска интегратор генерирует линейно изменяющееся напряжение для захвата сигнала станции. Схема обратной связи обеспечивает повторяемость напряжения поиска в заданных пределах.
Сигналы с двух выходов дискриминатора двухполярного видеосигнала, превышающие заданный порог, вводят систему в режим захвата и селективно стробируют два регулируемых входных постоянных уровня для получения треугольного напряжения на выходе интегратора, причем центральная точка этого напряжения соответствует заданной частоте местного гетеродина.
Выходной сигнал гетеродина смешивается с накопленным сигналом промежуточной частоты для получения отклика принятого сигнала.
Недостатком данного устройства является низкая вероятность обнаружения кратковременных последовательностей нескольких источников излучения, которая обуславливается постоянной скоростью частотного поиска и использованием режима захвата при обнаружении сигнала.
Известен также радиоприемник для селективной настройки (патент США №3725788, 1973 г., МКИ: H04B 1/32), содержащий первый преобразователь, обеспечивающий настройку на непрерывный входной высокочастотный сигнал, и второй преобразователь для автоматической последовательной настройки на несколько дискретных, предварительно устанавливаемых частот, отличающихся от частоты непрерывного входного ВЧ сигнала.
Первое и второе настроечные устройства работают одновременно, причем второе содержит схему для автоматического последовательного переключения приемника с одной дискретной частоты на другую до обнаружения сигнала.
Предусмотрена также схема, отключающая второе настроечное устройство в отсутствие передачи на любой из дискретных частот, и схема, отключающая первое настроечное устройство и блокирующая второе настроечное устройство в режиме приема одной из дискретных частот при наличии непрерывного ВЧ сигнала.
Недостатком приемника является то, что частотный поиск производится по заранее определенным точкам частотного диапазона, вследствие чего не обеспечивается обнаружение сигналов с априорно неизвестной несущей частотой.
Приемник с быстрой автоматической перестройкой на фиксированные волны (патент США №3714585, 1973 г., МКИ H04B 1/32) имеет местный гетеродин с элементами, определяющими настройку на различные волны и включаемыми последовательно для управления частотой настройки.
Регистр сдвига, управляемый многочастотным синтезатором, используется для определения последовательности работы элементов, настраивающих приемник на различные волны.
В каждом канале имеются переключатели для управления частотой синхрогенератора. Когда канальный переключатель на высокую частоту и элемент настройки на определенную волну, связанный с этим переключателем, присоединяются к схеме гетеродина, синхронизатор снова быстро выдает импульсы и воздействует на элемент, определяющий настройку приемника на следующую волну до того, как схема, принимающая несущую, сможет настроиться на эту волну.
Недостатком приемника с быстрой автоматической перестройкой в диапазоне частот является низкая точность измерения параметров принимаемых сигналов вследствие минимального количества принятых сигналов.
Кроме того, данный приемник имеет низкую вероятность обнаружения кратковременных последовательностей сигналов, т.к. настройка синтезатора на любую из частот осуществляется последовательно по заранее определенному закону.
Способ перестройки приемника, описанный в заявке ФРГ №3628964 от 26.8.1986 г., H03J 5/00, H04H 1/00, дает возможность настройки и включения приемника в заданное время, по которому данные (дата, время начала передачи, частота, программа и т.д.) вводятся в запоминающее устройство в определенном порядке, например, по возрастанию даты и времени начала передачи.
Данные могут быть перераспределены в другом порядке (для сокращения времени перестройки), например, по возрастанию частоты. Процесс поиска прекращается при совпадении данных, содержащихся в запоминающем устройстве с информацией, имеющейся в принятом сигнале, что является существенным недостатком данного способа, не позволяющим использовать его для поиска кратковременных излучений нескольких РЛС.
Известен ряд других работ по синтезу эффективных методов частотного поиска в аппаратуре радиотехнической разведки. В публикациях Ю.В. Шепеля ″Использование метода адаптации по частоте при исполнительной разведке″, Военная радиоэлектроника, №15, 1967 г., ″Оценка повышения эффективности разведки радиосигналов за счет использования метода адаптации по частоте в поисковом разведывательном приемнике″, Военная радиоэлектроника №16, 1969 г., рассмотрены вопросы оптимизации поиска по несущей частоте, в основу которой положен принцип выделения из принимаемой в интересах исполнительной разведки совокупности сигналов информации о ″новых″ сигналах, т.е. тех, которые не обнаруживались на предыдущих циклах частотного поиска.
Рассматриваемый в указанных статьях Ю.В. Шепеля разведприемник содержит антенну, смеситель, УПЧ, детектор, видеоусилитель, поисковый гетеродин, генератор тактовых импульсов, счетную схему, блок синхронизации и управления, три блока памяти, блок сравнения.
Принцип работы данного разведприемника заключается в следующем. Поисковый гетеродин перестраивается в полосе разведуемых частот. При приеме сигнала счетная схема измеряет промежуток времени между моментом начала перестройки и моментом появления импульса на выходе видеоусилителя.
Измеренный промежуток времени соответствует частоте принимаемого сигнала. Блоки памяти служат для запоминания несущей частоты принятых сигналов за каждый цикл обзора по частоте.
Блок сравнения производит сравнение несущей частоты принимаемых сигналов за предыдущий и последующий циклы обзора по частоте и определяет значение частот ″новых″ сигналов.
На первом частотном обзоре данные о несущей частоте записываются в первый блок памяти, на втором - во второй блок памяти. Далее производится сравнение результатов первого и второго обзоров, в результате чего определяются ″новые″ сигналы.
После третьего обзора по частоте процедура сравнения аналогична ранее описанной с той лишь разницей, что сравниваются сигналы второго и третьего блока памяти.
Результаты четвертого обзора записываются в подготовленный для записи первый блок памяти, при этом сравнивается информация с выходов первого и третьего блоков памяти, а второй подготавливается для записи результатов пятого частотного обзора.
В работе В.А. Брагинского и др. ″Разведывательный приемник с программно-дискретной настройкой″, Военная радиоэлектроника, №16, 1969 г., рассмотрены особенности построения и принцип действия разведприемника с автоматизированной циклической частотной настройкой по программе, записанной на перфокарту, т.е. по заранее определенной программе.
В статье В.Н. Игнатьева ″Оптимальный частотный поиск по диапазону с переменной скоростью″, Военная радиоэлектроника, №16, 1969 г., показано, что оптимизация частотного поиска может быть осуществлена на основе априорных данных о возможном нахождении излучающей РЛС в том или другом участке частотного диапазона.
При этом в участках диапазона, где предполагается наличие излучающих РЛС, используется медленная скорость частотного поиска, а там, где по априорным данным работа РЛС маловероятна, - используется быстрый поиск по частоте.
Устройства и способы организации частотного поиска, приведенные в данных публикациях, не дают удовлетворительных результатов по вероятности обнаружения кратковременных последовательностей и точности измерения параметров априорно неизвестных сигналов, т.к. при этом используется перестройка несущей частоты либо по заранее определенному закону, либо решается задача выделения сигналов, которые на предыдущих обзорах не обнаруживались.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для управления частотным поиском пассивной радиолокационной станции. Часть этого устройства, функционально соответствующая заявляемому устройству, рассматривается в качестве прототипа.
Устройство-прототип содержит приемник радиолокационных сигналов, состоящий из последовательно соединенных смесителя, усилителя промежуточной частоты (УПЧ), детектора и видеоусилителя, а также гетеродина, выход которого подключен к входу смесителя, формирователь управляющего напряжения, выход которого соединен с управляющим входом гетеродина, счетчик, генератор тактовых импульсов, блок определения параметров сигналов, подключенный к выходу видеоусилителя, а также блок определения периода следования.
Устройство содержит также ряд других элементов и узлов, состав и функционирование которых не имеют отношения к сущности заявляемого технического решения.
Гетеродин и смеситель приемника осуществляют преобразование принятых СВЧ сигналов в радиосигналы промежуточной частоты, которые затем усиливаются в УПЧ и поступают далее на детектор огибающей и видеоусилитель.
Управление режимом частотного поиска гетеродином осуществляется формирователем управляющего напряжения. Генератор тактовых импульсов и счетчик вырабатывают кодовый сигнал, который используется для формирования управляющего напряжения, обеспечивающего требуемый режим поиска.
В блок определения параметров сигналов с выхода видеоусилителя поступают сигналы, параметры которых (например, амплитуда, длительность) подлежат измерению.
Блок определения параметров сигналов содержит устройство определения позиционного кода уровня принимаемого сигнала, представляющее собой набор параллельно включенных пороговых элементов, шифратор, преобразующий позиционный код уровня в двоичный, и устройство определения двоичного кода длительности сигнала, например, в виде счетчика, подключенного к генератору тактовых импульсов через элемент И, на другой вход которого подается измеряемый видеоимпульс.
Устройство-прототип обеспечивает адаптивное управление перестройкой частоты в супергетеродинном приемнике пассивной РЛС, сущность которого заключается в следующем.
Гетеродин осуществляет быструю перестройку частоты со скоростью, позволяющей принимать за время нахождения полосы пропускания на несущей частоте разведываемой излучающей РЛС только один импульс (это время должно быть равным максимально возможному периоду следования разведуемого сигнала).
В момент приема этого одного импульса соответствующие элементы схемы прототипа вырабатывают управляющее напряжение, которое поступает на устройство управления текущей частотой гетеродина и останавливает перестройку частоты, т.е. ″останавливает″ полосу пропускания приемника на несущей частоте разведуемой излучающей РЛС.
Остановка может производиться либо на определенный фиксированный промежуток времени, продолжительность которого определяется величиной нескольких максимальных периодов следования разведуемой РЛС, в течение которых должен быть выполнен анализ сигнала, либо на время, в течение которого будет принято необходимое для выполнения обнаружения и анализа количество импульсов.
Таким образом, остановка будет закончена либо через несколько максимальных периодов следования, либо по истечении времени, соответствующего установленному (необходимому для точного анализа) количеству периодов следования (или числу принимаемых импульсов) данного сигнала.
Устройству, выбранному в качестве прототипа, а также всем перечисленным выше аналогам присущ существенный недостаток, заключающийся в том, что ни одно из приведенных технических решений не обеспечивает совместного выполнения требований по высокой вероятности обнаружения при приеме кратковременных последовательностей, излучаемых главным лепестком РЛС, и высокой точности измерения параметров принятых сигналов, требующей приема и обработки максимально возможного количества импульсов от каждой разведуемой по главному лепестку РЛС.
Иными словами, известное устройство будет иметь либо низкую вероятность - при времени анализа, обеспечивающем прием достаточного числа импульсов для точного определения параметров (не менее 15-20 импульсов), либо недостаточную точность анализа параметров сигналов - при сокращении времени анализа до минимально возможного (3-5 импульсов) и повышении при этом вероятности обнаружения.
Целью предложения является устранение данного недостатка.
Для этого в состав устройства-прототипа, содержащего приемник радиолокационных сигналов, состоящий из последовательно соединенных смесителя, усилителя промежуточной частоты, детектора и видеоусилителя, а также гетеродина, выход которого соединен с входом смесителя, формирователь управляющего напряжения, выход которого соединен с входом гетеродина счетчик, генератор тактовых импульсов, блок определения параметров сигналов, подключенный к выходу видеоусилителя, а также блок определения периода следования, содержащий n узлов выделения импульсных сигналов по частоте следования, представляющих собой узкополосные фильтры, входы которых объединены и являются входом блока, введены блок оперативной памяти, блок формирования стробов и коммутатор, первый сигнальный вход которого подключен к выходу счетчика, вход которого соединен с выходом генератора тактовых импульсов, второй вход коммутатора подключен к выходу блока оперативной памяти, управляющий вход упомянутого коммутатора подключен к первому выходу блока формирования стробов, а выход соединен с входом формирователя управляющего напряжения и с первым входом блока оперативной памяти, второй вход блока оперативной памяти и вход блока формирования стробов подключены к выходу блока определения периода следования, образованному группой выходов n узлов выделения импульсных сигналов по частоте следования (узкополосных фильтров), третий вход блока оперативной памяти подключен к второму выходу блока формирования стробов, вход блока определения периода следования соединен с выходом видеоусилителя.
Блок определения периода следования сигналов содержит n узлов выделения импульсных сигналов по частоте следования, каждый из которых состоит из первого и второго элементов задержки, первого и второго элементов И.
Выход первого элемента задержки соединен с первым входом первого элемента И, выход которого подключен ко входу второго элемента задержки и второго входа второго элемента И.
Выход второго элемента задержки подключен к первому входу второго элемента И, выход которого является выходом узла. Выходы вторых элементов И всех узлов образуют n выходов блока определения периода следования сигналов; входы первых элементов задержки и вторые входы первых элементов И соединены вместе и являются входом блока.
Блок оперативной памяти содержит n цепочек, каждая из которых состоит из первого и второго элементов И и регистра.
Выход первого элемента И соединен со входом регистра, выход которого подключен к первому входу второго элемента И. Выходы каждой из n цепочек поступают на вход элемента ИЛИ, выход которого является выходом блока оперативной памяти.
Вторые входы первых элементов И каждой из n цепочек объединены вместе и являются первым входом блока оперативной памяти. Первые входы первых элементов И каждой из n цепочек образуют n вторых входов блока оперативной памяти.
Вторые входы вторых элементов И каждой из n цепочек образуют n третьих входов блока оперативной памяти.
Блок формирования стробов содержит n цепочек, каждая из которых состоит из последовательно соединенных элемента задержки и генератора одиночных импульсов (стробов).
Входы элементов задержки каждой цепочки образуют n входов блока формирования стробов, выходы генераторов одиночных импульсов каждой из n цепочек подключены ко входам элемента ИЛИ, выход которого является первым выходом блока формирования стробов.
Выходы генераторов одиночных импульсов каждой из n цепочек образуют n вторых выходов блока формирования стробов.
Коммутатор содержит первый и второй элементы И и элемент ИЛИ. Выходы первого и второго элементов И подключены ко входам элемента ИЛИ, выход которого является выходом коммутатора.
Первый вход первого элемента И является первым входом коммутатора. Первый вход второго элемента И является вторым входом коммутатора. Второй инвертированный вход первого элемента и второй вход второго элемента И соединены вместе и являются управляющим входом коммутатора.
Первый элемент И, второй вход которого инвертирован, выполняет логическую операцию НЕ-И. Сущность предложения заключается во введении (для одновременного обеспечения как быстродействия при приеме кратковременных последовательностей, излучаемых главным лепестком РЛС, так и высокой точности измерения параметров принятых сигналов) адаптивного частотно-временного стробирования на основе формирования в предлагаемом устройстве частотных и временных стробов, обеспечивающих в процессе частотного поиска скачкообразную перестройку приемного устройства на несущую частоту сопровождаемой последовательности в момент времени, соответствующий приему очередного сигнала данной последовательности.
Таким образом внутри стробов частота гетеродина принимает значение, при котором обеспечивается прием сигналов, стробируемых данной последовательностью, а вне стробов осуществляется перестройка для поиска в диапазоне частот.
Сопоставительный анализ заявляемого решения с прототипом и ближайшими аналогами показывает, что заявляемое устройство отличается наличием в нем ряда блоков и устройств (блок оперативной памяти, блок формирования стробов, коммутатор), определенным образом соединенных между собой и с уже имеющимися элементами, что позволяет сделать вывод о соответствии заявляемой совокупности существенных признаков критерию ″новизна″.
Сравнение заявляемого решения с другими известными техническими решениями показывает, что введенные согласно предложению дополнительные блоки и устройства содержат известные узлы и элементы, которые широко используются в системах радиотехнической разведки и пассивного целеуказания.
Однако более детальный сопоставительный анализ признаков, способов взаимодействия, функциональных связей с другими элементами, узлами и их роли в достижении результирующего эффекта показывает, что сочетание известных элементов и узлов в объеме предлагаемых в настоящей заявке функциональных блоков и устройств не является идентичным или взаимозаменяемым с известными техническими решениями.
Рассмотрим сказанное на конкретных примерах.
Блок оперативной памяти предлагаемого устройства состоит из n параллельных цепочек, каждая из которых представляет собой ячейку памяти и содержит последовательно соединенные первый элемент И, регистр, второй элемент И, выход которого является выходом цепочки.
Особенностью блока оперативной памяти является то, что в каждой из цепочек (ячеек памяти) имеется управление по входу (второй вход первого элемента И) и выходу (второй вход второго элемента И).
Кроме того, информация с выхода каждой из цепочек (ячеек) поступает на вход элемента ИЛИ, выход которого образует единый выход блока оперативной памяти.
Использование управления ячеек памяти по входу и выходу в сочетании с объединением выходов ячеек через элемент ИЛИ в один общий выход является особенностью построения данного блока оперативной памяти, исключающей возможность непосредственного использования типовых блоков памяти.
Блок формирования стробов содержит n цепочек, каждая из которых формирует упреждающий временный строб по любой из сопровождаемых импульсных последовательностей.
Особенностью построения блока формирования стробов является одновременное использование в предлагаемом устройстве двух выходов - первого - образованного n выходами цепочек формирования упреждающих временных стробов и второго - образованного путем объединения через элемент ИЛИ n выходов упомянутых ранее цепочек, что не имеет места в известных устройствах.
Проведенное сопоставление показывает, что признаки заявляемого устройства (в частности блоки оперативной памяти и формирования стробов) не являются идентичными подобным признакам и их функциям в известных технических решениях, а взаимодействие всех признаков в рамках заявляемого устройства приводит к появлению нового качества, заключающегося в одновременном обеспечении быстродействия при приеме кратковременных импульсных последовательностей сигналов, излучаемых главным лепестком РЛС, и высокой точности измерения параметров принятых сигналов за счет приема практически всех импульсов, излучаемых по главному лепестку каждой из разведуемых РЛС.
Такой возможностью не обладает прототип и аналоги. Это позволяет сделать вывод о соответствии заявляемого устройства критерию ″существенные отличия″.
Состав, аппаратурное выполнение и работа заявляемого устройства поясняются последующим подробным описанием и чертежами.
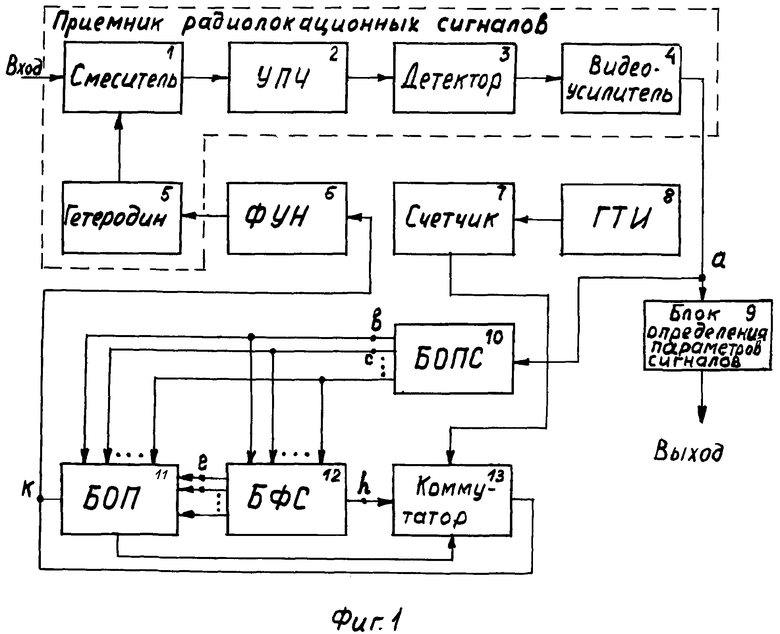
На Фиг. 1 представлена функциональная схема заявляемого устройства.
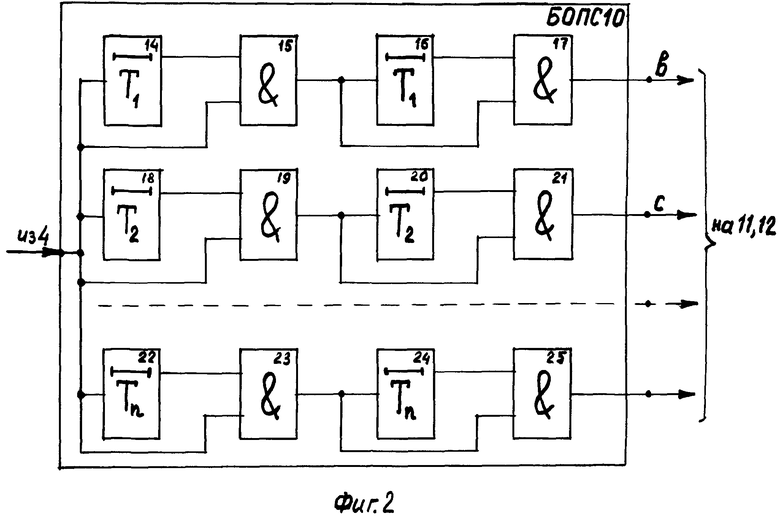
На Фиг. 2 - подробная функциональная схема блока определения периода следования.
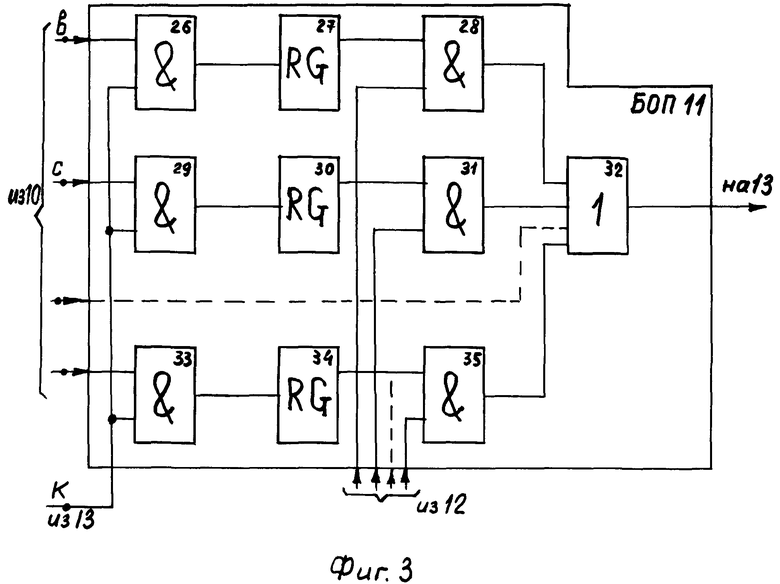
На Фиг. 3 - подробная функциональная схема блока оперативной памяти.
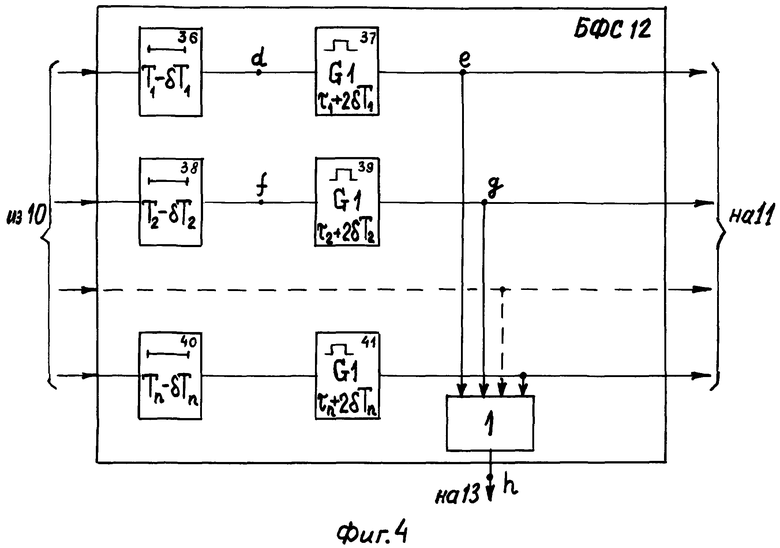
На Фиг. 4 - подробная функциональная схема блока формирования стробов.
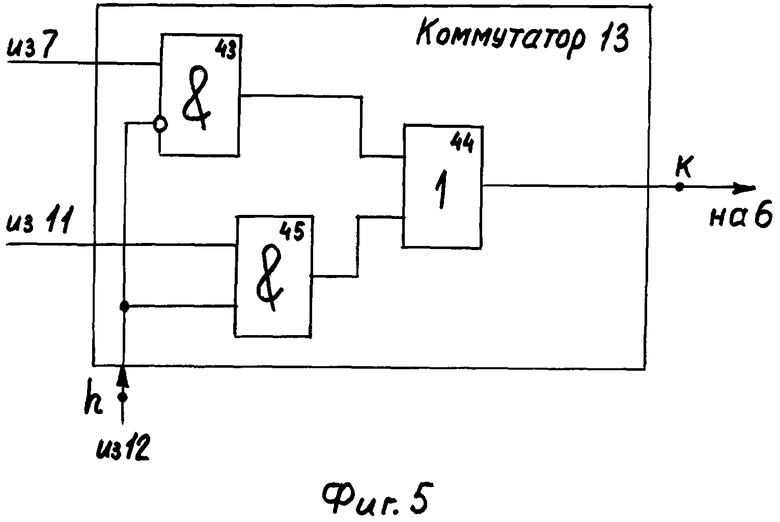
На Фиг. 5 - подробная функциональная схема коммутатора.
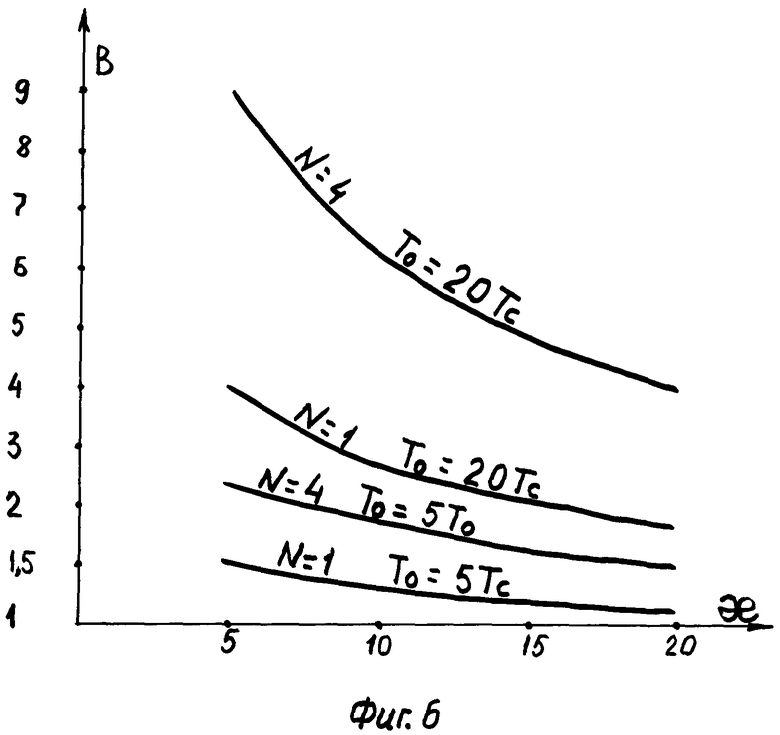
На Фиг. 6 - графики зависимости величины выигрыша В, равного отношению времен обзора для известного и заявляемого устройств, от количества разрешаемых градаций по частоте.
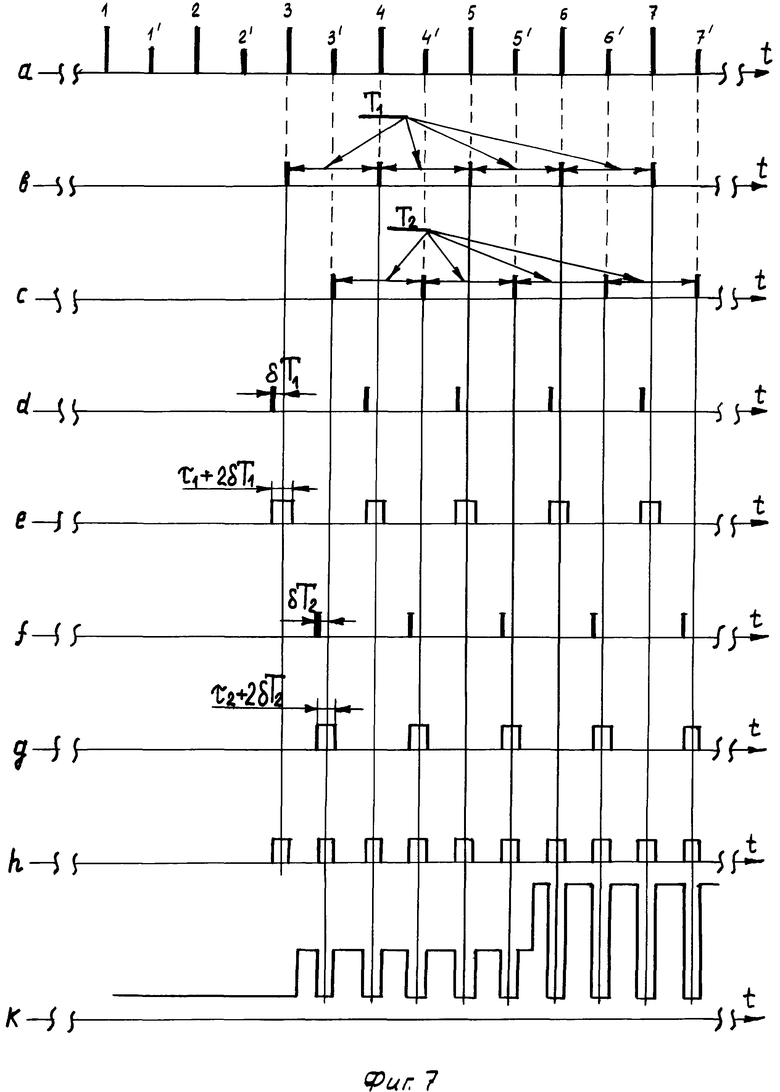
На Фиг. 7 изображена временная диаграмма работы заявляемого устройства.
Устройство для управления частотным поиском пассивной радиолокационной станции (Фиг. 1) содержит приемник радиолокационных сигналов, состоящий из последовательно соединенных смесителя 1, первый вход которого является входом устройства, усилителя промежуточной частоты (УПЧ) 2, детектор 3 и видеоусилителя 4, а также гетеродина 5, выход которого соединен с вторым входом смесителя 1, формирователь управляющего напряжения (ФУН) 6, выход которого соединен со входом гетеродина 5, счетчик 7, генератор тактовых импульсов (ГТИ) 8, блок определения параметров сигналов 9, подключенный к выходу видеоусилителя 4, блок определения периода следования (БОПС) 10, блок оперативной памяти (БОП) 11, блок формирования стробов (БФС) 12 и коммутатор 13.
Первый сигнальный вход коммутатора 13 подключен к выходу счетчика 7, вход которого соединен с выходом ГТИ 8, второй вход коммутатора 13 подключен к выходу БОП 11, управляющий вход упомянутого коммутатора 13 подключен к первому выходу БФС 12, а выход соединен с входом ФУН 6 и с первым входом БОП 11, второй вход БОП 11 и вход БФС 12 подключены к выходу БОПС 10, третий вход БОП 11 подключен к второму выходу БФС 12, вход БОПС 10 соединен с выходом видеоусилителя 4.
Выходом устройства является выход блока определения параметров сигналов 9. Блок определения периода следования 10 (Фиг. 2) содержит n узлов выделения импульсных сигналов по частоте следования, каждый из которых состоит из первого 14 и второго 16 элементов задержки, первого 15 и второго 17 элементов И.
Выход первого элемента задержки 14 соединен с первым входом первого элемента И 15, выход которого подключен ко входу второго элемента задержки 16 и второго входа второго элемента И 17.
Выход второго элемента задержки 16 подключен к первому входу второго элемента И 17, выход которого является выходом узла. Выходы вторых элементов И (17, 21…25) узлов образуют n выходов блока определения периода следования 10.
Входы первых элементов задержки 14, 18…22 и вторые входы первых элементов И 15, 19…23 соединены вместе и являются входом БОПС 10.
Блок оперативной памяти 11 (фиг. 3) содержит n цепочек, каждая из которых состоит из первого 26 и второго 28 элементов И и регистра 27.
Выход первого элемента И 26 соединен со входом регистра 27, выход которого подключен к первому входу второго элемента И 28. Выходы каждой из n цепочек соединены со входами элемента ИЛИ 32 выход которого является выходом БОП 11.
Вторые входы первых элементов И 26, 29…33 каждой из n цепочек объединены вместе и являются первым входом БОП 11. Первые входы первых элементов И 26, 29…33 каждой из n цепочек образуют n вторых входов БОП 11.
Вторые входы вторых элементов И 28, 31…35 каждой из n цепочек образуют n третьих входов БОП 11.
Блок формирования стробов 12 (Фиг. 4) содержит n цепочек, каждая из которых состоит из последовательно соединенных элемента задержки 36 и генератора одиночных импульсов (стробов) 37.
Входы элементов задержки 36, 38…40 каждой цепочки образуют n входов БФС 12, выходы генераторов одиночных импульсов 37, 39…41 каждой из n цепочек подключены ко входам элемента ИЛИ 42, выход которого является первым выходом блока формирования стробов 12.
Выходы генераторов одиночных импульсов 37, 39…41 каждой из n цепочек образуют n вторых выходов БФС 12.
Коммутатор 13 содержит первый 43 и второй 45 элементы И и элемент 44 ИЛИ. Выходы первого 43 и второго 45 элементов И подключены ко входам элемента ИЛИ 44, выход которого является выходом коммутатора 13.
Первый вход первого элемента И 43 является первым входом коммутатора 13. Первый вход второго элемента И 45 является вторым входом коммутатора 13.
Второй инвертированный вход первого элемента И 43 и второй вход второго элемента И 45 соединены вместе и являются управляющим входом коммутатора 13.
Остальные блоки предлагаемого устройства выполнены по известным схемам на современной элементной базе, например, аналогичны соответствующим блокам прототипа.
В качестве элементной базы могут быть использованы микросхемы серий 133, 135, 533, 555 и др.
Рассмотрим взаимодействие блоков предлагаемого устройства для управления частотным поиском пассивной радиолокационной станции при приеме кратковременных пачек периодических импульсных радиосигналов.
Для наглядности описания воспользуемся временными диаграммами работы пеленгатора и эторами сигналов на выходах его отдельных блоков (Фиг. 7).
Генератор тактовых импульсов 8 генерирует импульсные видеосигналы, поступающие на вход счетчика 7, на выходе которого формируется код количества импульсов, поступающий на первый вход коммутатора 13.
В исходном состоянии коммутатор 13 по первому входу открыт и поступающий со счетчика 7 код через первый элемент И 43 (второй вход первого элемента И инвертирован) и через элемент ИЛИ 44, выход которого является выходом коммутатора 13, поступает на формирователь управляющего напряжения 6, преобразующий код количества импульсов в управляющее напряжение, поступающее с формирователя 6 на гетеродин 5 и осуществляющее управление частотным поиском гетеродина 5.
Таким образом, код, поступающий со счетчика 7 через коммутатор 13 на формирователь 6, фактически является кодом текущей частоты гетеродина.
Перестройка гетеродина 5 по частоте осуществляется циклами. Периодичность циклов перестройки в диапазоне разведуемых частот обеспечивается счетчиком 7, который самообнуляется при заполнении всех его разрядов, после чего начинается новый цикл отсчета поступивших с ГТИ 8 на счетчик 7 видеоимпульсов и, следовательно, новый цикл перестройки гетеродина 5.
В процессе изменения управляющего напряжения происходит ступенчатое изменение частоты гетеродина 5. Время нахождения гетеродина 5 на каждой из частотных ″ступенек″ определяется временем, необходимым для приема определенного количества сигналов.
Высокочастотные колебания с выхода гетеродина 5 поступают на гетеродинный вход смесителя 1. Принятые сигналы с выхода антенно-фидерных устройств поступают на сигнальный вход смесителя 1, являющийся входом приемника радиолокационных сигналов.
В результате взаимодействия в смесителе 1 входного высокочастотного сигнала с сигналом гетеродина 5 происходит преобразование входного сигнала в сигнал промежуточной частоты, который усиливается в УПЧ 2, детектируется в детекторе 3, огибающая входного сигнала с выхода которого усиливается в видеоусилителе 4.
Видеосигнал с выхода видеоусилителя 4 (Фиг. 7а) поступает одновременно на блок определения параметров сигналов 9 и БОПС 10 (Фиг. 2), входами которого являются соединенные вместе входы первых элементов задержки (14, 18…22) и вторые входы первых элементов И (15, 19…23).
Каждый из n узлов БОПС 10 представляет собой фильтр, настроенный на определенное значение периода повторения принимаемых сигналов.
С целью уменьшения ложных срабатываний от помеховых сигналов информация на выходе каждого из n узлов формируется только при приеме трех подряд сигналов данной последовательности.
Это достигается путем последовательного включения в каждый из узлов двух ячеек, каждая из которых содержит элемент задержки (14, 18…22 или 16, 20…24) и элемент И (15, 19…23 или 17, 21…25).
Время задержки в элементе задержки постоянно для каждого из узлов и соответствует периоду повторения сигналов, на прием которых рассчитан данный узел. Каждый из n узлов БОПС 10 рассчитан на прием сигналов только одного, заранее определенного периода повторения.
Количество узлов в БОПС 10 (т.е. количество каналов расфильтровки по периоду повторения) определяется количеством принимаемых последовательностей сигналов.
В качестве примера рассмотрим работу первого канала БОПС 10 и дальнейшее прохождение сигналов с его выхода по блокам предлагаемого устройства.
Видеоимпульс с выхода видеоусилителя поступает, как было отмечено ранее, на вход БОПС 10 и далее подается на элемент задержки 14 и второй вход элемента И 15.
Время задержки в элементе 14 равно периоду повторения одной из принимаемых последовательности Т1. Так как во время прихода первого сигнала первый элемент И 15 закрыт (на первом его входе сигнал отсутствует), то выходной сигнал отсутствует как на выходе элемента 15, так и на выходе канала (выходе элемента И 17).
Второй пришедший сигнал поступает на вход элемента задержки 14 и на второй вход первого элемента И 15. К моменту поступления второго сигнала на второй вход первого элемента И 15 на первом входе первого элемента И 15 появляется первый принятый сигнал, задержанный на время Т1 в элементе 14.
При совпадении во времени сигналов на первом и втором входах первого элемента И 15 на его выходе формируется видеосигнал, поступающий одновременно на первый вход второго элемента задержки 16 и второй вход второго элемента И 17.
Во втором элементе задержки 16 сигнал задерживается также на величину Т1. Таким образом, при приеме двух сигналов последовательности на втором входе второго элемента И 17 сигнал присутствует, а на первом входе второго элемента И сигнал отсутствует, вследствие чего сигнал на выходе ″В″ данного канала также отсутствует.
При приеме третьего сигнала данной последовательности на выходе второго элемента задержки 16 появляется второй задержанный сигнал данной последовательности и поступает на первый вход второго элемента И 17.
В это же время на второй вход второго элемента И 17 поступает третий сигнал принимаемой последовательности. Совпадение во времени на первом и втором входах второго элемента И 17 второго и третьего сигналов данной последовательности обеспечивает формирование на выходе второго элемента И, являющегося выходом ″в″ первого канала, видеосигнала.
При поступлении на вход первого канала четвертого, пятого и последующих сигналов данной последовательности на выходе первого узла формируется соответственно второй, третий и последующие видеосигналы, характеризующие принадлежность принимаемых сигналов к данной последовательности (Фиг. 7в).
Таким образом, каждый из n узлов на своем выходе при приеме последовательности сигналов, период повторения которых соответствует периоду, на который рассчитан данный узел, формирует, начиная с третьего сигнала, последовательности видеоимпульсов, характеризующие принадлежность данных сигналов к последовательности, на прием которой рассчитан данный узел (Фиг. 7в, с).
Сигналы с каждого из n выходов БОПС 10 поступают одновременно на n входов БФС 12 и n вторых входов БОП 11. Блок формирования стробов 12 (Фиг. 4) предназначен для формирования управляющих временных стробов для приема последующих сигналов принимаемой последовательности.
БФС 12 состоит из n цепочек, каждая из которых содержит элемент задержки 36 (38…40), время задержки которого на δТ1 (δT2…δTn) меньше периода повторения Т1 (T2…Tn) соответствующих последовательностей (Фиг. 7d, f), а также генератора импульсов 37 (39…41), формирующего временной строб (Фиг. 7e, g), длительность которого составляет τ1+2δT1 (τ2+2δT2; τn+2δTn) и превышает длительность принятого сигнала.
Таким образом, задержка принятого сигнала в элементе 36 на δT1 по отношению к переднему фронту принимаемого сигнала, с последующим формированием генератором 37 видеоимпульсов длительностью τ1+2δТ1 обеспечивает выработку упреждающего (относительно переднего фронта принимаемого сигнала) временного строба (Фиг. 7e при T1 и Фиг. 7g при Т2), который с выходов каждой из цепочек через элемент ИЛИ 42, выход которого является первым выходом БФС 12, поступает на вторые входы первого 43 и второго 45 элементов И коммутатора 13.
Объединенные вторые входы упомянутых элементов И являются управляющим входом коммутатора 13. Сформированные в БФС 12 упреждающие временные стробы с выхода генераторов импульсов 37, 39…41 каждой из цепочек образуют n вторых выходов БФС 12, которые подключаются к n третьим входам БОП 11.
Блок оперативной памяти 11 предназначен для формирования адаптивных частотно-временных стробов, обеспечивающих частотное и временное стробирование сигналов принимаемых последовательностей. Функционирует БОП 11 следующим образом.
В качестве примера, как и ранее, рассмотрим прохождение сигналов по первой цепочке.
Видеоимпульсы с выхода первого узла - фильтра БОПС 10 поступают на первый вход элемента И 26 блока оперативной памяти 11. На второй вход элемента И 26 (как и на аналогичные входы элементов И 29…33) через открытый коммутатор 13 со счетчика 7 постоянно поступает код, соответствующий текущему коду частоты гетеродина 5. Пришедший из БОПС 10 на первый вход элемента И 26 видеоимпульс разрешает прохождение через элемент И 26 текущего кода частоты гетеродина, соответствующего в данный момент времени с точностью до величины промежуточной частоты приемника значению несущей частоты принимаемого сигнала, которое записывается в регистре 27 и поступает на вход элемента И 28. При наличии на втором входе элемента И 28 упреждающего временного строба (Фиг. 7в), поступающего с выхода первой цепочки БФС 12, кода несущей частоты принятого ранее сигнала с регистра 27 через элемент ИЛИ 32 поступает на первый вход элемента И 45, являющийся вторым входом коммутатора 13.
Видеоимпульсы временных стробов, поступающие также на второй вход коммутатора 13, запрещают прохождение через элемент И 43 на выход коммутатора 13 текущего кода гетеродина и разрешают прохождение через элемент И 45 кода несущей частоты предыдущего сигнала последовательности, записанного в регистре 27. Указанный код несущей частоты через элемент ИЛИ 44, выход которого является выходом коммутатора 13, поступает на ФУН 6, где преобразуется в напряжение, управляющее частотным поиском гетеродина 5.
Время нахождения гетеродина на каждой из частотных ″ступенек″ выбирается из расчета необходимости приема нескольких сигналов (например 3…5) с заданным периодом повторения (например Т1). После приема этого количества сигналов гетеродин перестраивается в полосе разведуемых частот путем установки на следующую, например, вторую частотную ″ступеньку″, но в момент приема очередного сигнала последовательности в БФС 12 формируется упреждающий временный строб, который с выхода первой цепочки БФС 12 поступает через элемент И 42 на коммутатор 13 и закрывает его по первому входу, запрещая прохождение на ФУН 6 кода количество импульсов с выхода счетчика 7, который управляет циклической перестройкой гетеродина 5.
Этот же строб поступает на второй вход второго элемента И 45 коммутатора 13 и разрешает прохождение кода несущей частоты предыдущих сигналов данной последовательности, хранящегося в регистре 27 БОП 11. Указанный код из регистра 27 через открытый упреждающим стробирующим сигналом первой цепочки БФС 12 элемент И 28 и элемент ИЛИ 32 блока оперативной памяти 11 поступает на первый вход второго элемента И 45, с выхода которого через элемент ИЛИ 44 поступает на ФУН 6, где преобразуется в управляющее напряжение, возвращающее гетеродин на время продолжительности строба на частоту, при которой сигнал принимаемой последовательности попадает в полосу пропускания приемника (т.е. на частоту, при которой был осуществлен первоначальный прием сигналов данной последовательности). После приема в пределах сформированного частотно-временного строба сигнала сопровождаемой последовательности гетеродин снова возвращается на частоту второй частотной ″ступеньки″ (в случае, если время нахождения гетеродина на данной частоте не превысило требуемое), либо перестраивается на очередную третью частотную ″ступеньку″ (Фиг. 7к).
Прием следующих сигналов сопровождаемой последовательности при перестройке гетеродина в полосе частот осуществляется аналогично ранее описанному. Адаптивное частотно-временное управление перестройкой гетеродина путем кратковременной установки его частоты на значение, обеспечивающее прием сигналов сопровождаемой последовательности, осуществляется до момента окончания последовательности.
Длина принимаемой последовательности определяется временем контакта главного лепестка диаграммы направленности пассивной радиолокационной станции и главного лепестка излучающей разведуемой РЛС. Таким образом, использование в предлагаемом устройстве адаптивного частотно-временного стробирования позволяет получить новый эффект - одновременно обеспечить высокую вероятность обнаружения, т.е. исключить пропуски при приеме кратковременных последовательностей сигналов, излучаемых главным лепестком РЛС, а также высокую точность измерения параметров принятых сигналов, которая достигается за счет приема практически всех импульсов последовательности.
Полезный технический эффект от применения предложения заключается в повышении вероятности обнаружения и точности определения параметров кратковременных пачек периодических импульсных сигналов, поступающих на вход приемника заявляемого устройства при облучении главным лучом (и первым боковым лепестком) разведуемых РЛС, работающих в режиме сканирования. Это достигается за счет сокращения временных затрат на обзор частотного диапазона при одновременном увеличении количества принимаемых и анализируемых импульсных сигналов от каждой из обнаруживаемых РЛС, обеспечиваемых заявляемым устройством благодаря введению в его состав дополнительных определенным образом выполненных блоков и узлов, взаимосвязанно функционирующих в составе устройства с уже имеющимися блоками.
Сокращение времени обзора приводит к повышению вероятности обнаружения кратковременных пачек, а увеличение количества анализируемых импульсов позволяет повысить результирующую точность анализа сигналов разведуемых РЛС.
Оценку степени сокращения времени обзора частотного диапазона заявляемым устройством по отношению к прототипу можно произвести сравнением соответствующих временных затрат при разведке сигналов нескольких распределенных в частотном диапазоне РЛС, одновременно облучающих носитель станции пассивной разведки.
В известном устройстве обзор производится путем перестройки приемника с полосой ΔF в диапазоне частот Δf (количество разрешаемых градаций æ
В соответствии с изложенным, полное время обзора при наличии в диапазоне N РЛС будет Tобз.=(æ-N)Tсм+NTа.
В заявляемом устройстве перестройка производится с той же скоростью, но остановка перестройки на градации, где произошел прием импульса, производится лишь на время, обеспечивающее прием еще одного импульса (т.е. не более чем на Тсм), после чего перестройка продолжается. При этом время обзора будет (æ-N)Tсм+2NTс.
На Фиг. 6 приведены графики зависимости величины выигрыша В, равного отношению времен обзора для известного и заявляемого устройств, от величины æ при числе РЛС N=1 и 4 и времени анализа Та=5 Тсм и 20 Тсм.
Как можно заключить из графиков, при минимально необходимом для определения параметров пачки и статистической обработки сигналов времени анализа Та=20 Тс выигрыш во времени обзора диапазона для достаточно типичного значения æ=10÷12 будет лежать в пределах, примерно, от 2,5 до 5 для случаев наличия в диапазоне от 1 до 4 разведываемых РЛС.
Снижение времени обзора приводит к повышению вероятности обнаружения кратковременных пачек импульсных сигналов (содержащих, обычно, порядка 20÷40 импульсов), а реализуемая благодаря предлагаемому построению устройства управления частотным поиском возможность увеличения продолжительности анализа периодических импульсных сигналов (в пределе - до окончания облучения данной РЛС носителя станции пассивной разведки) обеспечивает возможность повышения точности определения параметров сигналов за счет обработки значительно большего числа импульсов, чем в прототипе, особенно при наличии в диапазоне нескольких РЛС.
Произведенная для одного из возможных сочетаний исходных данных (длительность пачки 30 импульсов, æ=9), характерного для определенных условий работы станции пассивной разведки, расчетная оценка степени повышения вероятности разведки при времени анализа, соответствующем приему 20 импульсов, показала, что для заявляемого устройства вероятность приема от каждой из РЛС не менее 20 импульсов в случаях наличия в диапазоне частот одной, двух, трех и четырех РЛС составляет, соответственно, 1, 1, ~0,85 и ~0,65 за один цикл обзора, в то время как для прототипа обеспечить прием 20 импульсов в данных условиях возможно лишь при наличии в диапазоне только одной РЛС.
Результирующий положительный эффект от использования предлагаемого устройства в станции пассивной разведки будет заключаться в конечном счете в повышении быстродействия и точности опознавания и определения координат объектов по излучениям их РЛС.
Экономический эквивалент этого эффекта может быть определен, например, путем оценки снижения расхода средств поражения за счет повышения точности целеуказания, однако такие, достаточно сложные и требующие учета ряда фактических ситуаций и вариантов использования оружия расчеты на данном этапе не производились.
Возможна также косвенная оценка экономического эффекта от применения заявляемого устройства путем сравнения стоимости его со стоимостью других вариантов построения приемных устройств станций пассивной разведки, позволяющих получить сходный технический эффект (т.е. повышение вероятности обнаружения и точности анализа сигналов по сравнению с устройством-прототипом).
Такими известными вариантами являются:
а) применение нескольких параллельно работающих поисковых приемников, каждый из которых перекрывает отдельно участок полного частотного диапазона; и
б) применение двухступенчатого построения приемного устройства, которое при этом должно содержать как минимум два отдельных последовательно во времени работающих приемных тракта - для обнаружения и определения участка диапазона частот, где находится сигнал, и для последующего точного анализа параметров данного сигнала.
В обоих случаях повышение качественных показателей достигается за счет значительного увеличения объема приемных устройств (ориентировочно - не менее чем в 1,5-2 раза) и соответствующего повышения стоимости станции.
Увеличение объема и стоимости предлагаемого устройства по отношению к прототипу, обусловленное введением в него нескольких относительно простых блоков и устройств (блок оперативной памяти, блок формирования стробов и коммутатор), значительно меньше и может составлять, по предварительной оценке, не более 15÷25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФАЗОВОЙ КАЛИБРОВКИ МНОГОКАНАЛЬНОГО ПРИЕМНИКА | 1975 |
|
SU1840917A1 |
| СТАНЦИЯ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ И ПОДАВЛЕНИЯ | 1998 |
|
RU2150178C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ | 1979 |
|
SU1840922A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕВИАЦИИ ЧАСТОТЫ | 1977 |
|
SU1840975A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1988 |
|
SU1841093A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕСТРОЙКОЙ ЧАСТОТЫ | 1977 |
|
SU1840903A1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |
Изобретение относится к области радиотехники и может быть использовано в станциях радиотехнической разведки и пассивного целеуказания. Достигаемый технический результат - уменьшение вероятности пропуска кратковременных сигналов. Указанный результат достигается за счет того, что устройство содержит тактовый генератор, счетчик, блок селекторов по периоду повторения, блок оперативной памяти, блок формирования стробов, коммутатор, соответствующим образом соединенные между собой, при этом блок оперативной памяти и блок формирования стробов выполнены определенным образом. 2 з.п. ф-лы, 7 ил.
1. Устройство управления частотной настройкой приемника, содержащее тактовый генератор, счетчик и блок селекторов по периоду повторения, отличающееся тем, что, с целью уменьшения вероятности пропуска кратковременных сигналов, введены блок оперативной памяти, блок формирования стробов и коммутатор, причем n выходов блока селекторов по периоду повторения соединены с соответствующими n входами блока оперативной памяти и n входами блока формирования стробов, n выходов которого соединены с соответствующими n дополнительными входами блока оперативной памяти, а дополнительный выход подключен к управляющему входу коммутатора, первый вход которого соединен с выходом счетчика, вход которого подключен к выходу тактового генератора, второй вход коммутатора соединен с выходом блока оперативной памяти, входом устройства является вход блока селекторов по периоду повторения, а его выходом - выход коммутатора, соединенный с управляющим входом блока оперативной памяти.
2. Устройство управления частотной настройкой приемника, по п. 1, отличающееся тем, что блок оперативной памяти состоит из n каналов, каждый из которых содержит последовательно соединенные первой элемент И, регистр памяти и второй элемент И, выход которого является выходом канала, n входового элемента ИЛИ, входы которого соединены с выходами соответствующих каналов, а выход является выходом блока оперативной памяти, причем первые входы первых элементов И являются входами, другие входы вторых элементов И являются дополнительными входами, а объединенные вторые входы первых элементов И являются управляющим входом блока оперативной памяти.
3. Устройство управления частотной настройкой приемника по п. 1, отличающееся тем, что блок формирования стробов состоит из n цепочек, каждая из которых включает последовательно соединенные линию задержки и формирователь импульса, выход которого является одним из n выходов блока формирования стробов, и из элемента ″ИЛИ″, n входов которого соединены с выходами соответствующих формирователей импульсов, а выход является дополнительным выходом блока формирования стробов, n входами которого являются входы соответствующих линий задержки.
| Патент США №3675132, МКИ H04B 1/26, 1972 г. |

