Изобретение относится к области радиолокации и может применяться в неследящих амплитудных моноимпульсных РЛС с гауссовской диаграммой направленности (ДН).
В моноимпульсных РЛС с амплитудной пеленгацией прием отраженных от целей сигналов ведется при помощи антенной системы, формирующей в каждой координатной плоскости два луча, отклоненных от равносигнального направления (РСН) на угол ±θ0. При отклонении цели на угол θ от РСН сигналы, принятые по обеим диаграммам направленности, будут различными. Разность амплитуд принятых сигналов указывает на величину отклонения цели от РСН.
Амплитудные моноимпульсные системы имеют ряд преимуществ. Они мало чувствительны к амплитудным флюктуациям отраженного сигнала, к помехам с амплитудной модуляцией.
Известен неследящий угломер с амплитудным мгновенным сравнением сигналов (АМС) (П.А. Бакут, И.А. Большаков, Б.М. Герасимов и др. "Вопросы статистической теории радиолокации", т. II, стр. 793-796), содержащий антенную систему, формирующую две ДН, гетеродин, два смесителя, два оптимальных фильтра, два квадратичных детектора, устройство перемножения, устройство вычитания, два интегратора, делящее устройство, нелинейное устройство, усилитель, оптимальные сглаживающие цепи. С выхода антенн сигналы поступают на первые входы смесителей, вторые входы связаны с выходом гетеродина. Выход первого смесителя связан с первым входом устройства перемножения, а также со входом делящего устройства через соединенные последовательно оптимальный фильтр (ОФ), квадратичный детектор, устройство вычитания, интегратор, выход второго смесителя связан со вторым входом делящего устройства через соединенные последовательно второй ОФ, устройство перемножения (через второй его вход), второй интегратор, причем выход второго ОФ связан через второй детектор со вторым входом устройства вычитания, выход делящего устройства связан со входом сглаживающих цепей последовательно через нелинейное устройство и усилитель.
Сигналы с выходов антенн сначала гетеродинируются, затем фильтруются оптимальными фильтрами, детектируются квадратичными детекторами и вычитаются.
Разность интегрируется и подается на вход делящего устройства. На второй вход делящего устройства поступает проинтегрированный результат перемножения сигналов с выходов ОФ. Результат деления поступает на устройство с нелинейной характеристикой y=arcctg x (y - выходная, x - входная величины). Выходной сигнал нелинейного элемента, умноженный на Δφ/π (Δφ - ширина ДН), поступает на сглаживающие цепи.
Недостатком этой системы является то, что точность пеленгации в ней существенно зависит от степени идентичности приемных каналов, а также от работы нелинейного устройства, от степени отклонения реальной его характеристики от нелинейной вида arcctg x. Такие нелинейные устройства сложны в реализации.
Наиболее близкой к предлагаемой является обзорная амплитудная моноимпульсная РЛС (А.И. Леонов, К.И. Фомичев, "Моноимпульсная радиолокация", стр. 26-27), антенна которой формирует для измерения угловой координаты два луча ДН в одной плоскости. Система содержит два приемных канала из соединенных последовательно смесителя, оптимального фильтра (ОФ), линейного УПЧ, детектора и гетеродина, выход которого соединен с гетеродинными входами смесителей приемных каналов, узел суммирования и соединенные последовательно узел вычитания и узел деления, причем выходы детекторов соединены со входами узла суммирования и узла вычитания, выход узла суммирования соединен со вторым входом узла деления.
Достоинством этой системы по сравнению с предыдущей является то, что она проще в реализации, здесь отсутствует нелинейное устройство с характеристикой
y=arctg x.
Среди недостатков отметим быстрое возрастание ошибки измерения угловых координат с удалением цели от равносигнального направления (РСН). Эта ошибка обусловлена аппроксимацией ДН в малой окрестности РСН (А.И. Леонов, К.И. Фомичев, "Моноимпульсная радиолокация", стр. 27, 130), в особенности использованием для любого направления прихода сигналов одного и того же значения крутизны ДН в точке РСН.
От этой ошибки можно в значительной степени избавиться, если учитывать крутизну ДН в направлении, близком к реальному положению цели.
Целью изобретения является повышение точности измерений угловых координат в амплитудных неследящих моноимпульсных РЛС с гауссовской ДН.
Цель осуществляется за счет того, что в радиолокационную систему, содержащую два приемных канала из соединенных последовательно смесителя, оптимального фильтра (ОФ), линейного УПЧ, детектора и гетеродина, выход которого соединен с гетеродинными входами смесителей приемных каналов, а также узел суммирования, и соединенные последовательно узел вычитания и узел деления, причем выходы детекторов соединены со входами узла суммирования и узла вычитания, выход узла суммирования соединен со вторым входом узла деления, введены дополнительно пять узлов деления, шесть узлов перемножения, два узла суммирования, два узла вычитания, источник опорного напряжения, причем выход первого узла деления соединен с первым входом третьего узла вычитания через соединенные последовательно второй узел деления, второй узел вычитания, первый узел перемножения, пятый узел деления, пятый узел перемножения, выход второго узла деления связан также со вторым входом третьего узла вычитания через соединенные последовательно второй узел суммирования, второй узел перемножения, шестой узел деления, шестой узел перемножения, причем выход источника опорного напряжения связан со вторыми входами второго узла вычитания и второго узла суммирования, выход первого узла перемножения связан с двумя входами третьего узла перемножения, а выход второго узла перемножения - с двумя входами четвертого узла перемножения, выходы третьего и четвертого узлов перемножения связаны соответственно с первым и вторым входами третьего узла суммирования, а выход третьего узла суммирования - со вторыми входами пятого и шестого узлов деления, кроме того, выходы детекторов приемных каналов связаны с первыми входами соответственно третьего и четвертого узлов деления, а выход первого узла суммирования - со вторыми входами третьего и четвертого узлов деления, выходы которых связаны со вторыми входами соответственно пятого и шестого узлов перемножения. Выходом устройства является выход третьего узла вычитания.
Нововведенные признаки в совокупности с известными определяют структуру итерационного измерителя, позволяющего существенно повысить точность измерения угловых координат за счет итерационной обработки угла θ отклонения цели от РСН. Суть итерационной обработки состоит в том, что на первом шаге мы определяем угол отклонения цели от РСН через крутизну ДН в точке РСН (как в прототипе), а на втором - через крутизну ДН в точке θ, полученной на первом шаге.
Поскольку для пеленгационной характеристики S(θ) (А.И. Леонов, К.И. Фомичев, "Моноимпульсная радиолокация", стр. 27) основным является разность сигналов U1, U2, получаемых на выходах приемных каналов, а сумма играет нормирующий характер, представим S(θ) в виде

При этом

где µ - крутизна ДН в точке пересечения диаграмм.
Если получаемые выборки сигналов U1 и U2 обработать с весами, пропорциональными крутизне диаграмм направленности в т.θ - µ1, µ2, и при этом учесть, что выборки, нормированные их суммой, должны быть пропорциональны значениям диаграмм направленности в направлении, близком к реальному на цель, то с учетом аппроксимации ДН (см. А.И. Леонов, К.И. Фомичев "Моноимпульсная радиолокация", стр. 130) для угла отклонения цели от РСН получаем соотношение:

откуда

При аппроксимации диаграммы направленности зависимостью типа кривой Гаусса (см., например, В.И. Власов, Н.Л. Коган и др. "Судовые радиолокационные станции и их применение", т. 1, стр. 32-33)

где Δθш - угол раствора по точкам половинной мощности; диаграммы, разнесенные на угол ±θ0 от равносигнального направления, можно описать соотношениями:

При этом µ=2aθ0, µ1=2a(θ0-θ), µ2=-2a(θ0+θ).
Учет крутизны диаграммы направленность в направлении, близком к направлению на цель, обеспечивает более точную оценку угла отклонения от РСН, чем в известном устройстве.
Известных технических решений, имеющих признаки, сходные с признаками, отличающими заявляемое решение от прототипа, не обнаружено. Сравнение не производится.
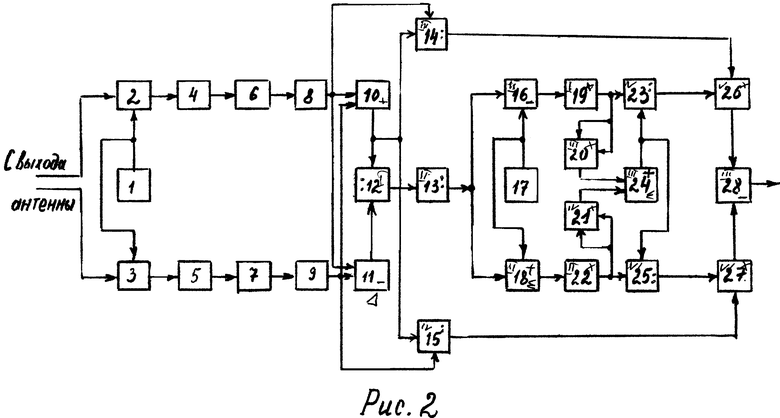
Предлагаемый измеритель содержит антенную систему, формирующую два луча ДН, гетеродин, два смесителя, два ОФ, два линейных УПЧ, два детектора, шесть узлов деления, шесть узлов перемножения, три узла суммирования, три узла вычитания, источник опорного напряжения. Сигналы, принятые по второму и первому лучам ДН, поступают соответственно на первые входы смесителей (2) и (3), выходы которых соединены со входами детекторов соответственно (8) и (9) через соединенные между собой последовательно ОФ (4) и соответственно ОФ (5) и линейный УПЧ (6) и соответственно УПЧ (7). Со вторыми входами смесителей (2), (3) соединен выход гетеродина (1). Выход каждого из детекторов (8), (9) соединен со входами узла суммирования (10) и узла вычитания (11), выходы узлов (10) и (11) соединены соответственно с первым и вторым входами узла деления (12), выход узла (12) соединен с первым входом третьего узла вычитания (28) через соединенные последовательно второй узел деления (13), второй узел вычитания (16), первый узел перемножения (19), пятый узел деления (23), пятый узел перемножения (26), выход второго узла деления (13) связан также со вторым входом третьего узла вычитания (28) через соединенные между собой последовательно второй узел суммирования (18), второй узел перемножения (22), шестой узел деления (25), шестой узел перемножения (27), причем выход источника опорного напряжения (17) связан со вторыми входами второго узла вычитания (16) и второго узла суммирования (18), выход первого узла перемножения (19) связан с двумя входами третьего узла перемножения (20), а выход второго узла перемножения (22) - с двумя входами четвертого узла перемножения (21), выходы третьего и четвертого узлов перемножения (20) и (21) связаны соответственно с первым и вторым входами третьего узла суммирования (24), а выход узла (24) - со вторыми входами пятого и шестого узлов деления (23) и (25), кроме того, выходи детекторов (8), (9) первого и второго приемных каналов с первыми входами соответственно третьего и четвертого узлов деления (14) и (15), а выход первого узла суммирования (10) - со вторыми входами третьего и четвертого узлов деления (14), (15), выходы которых связаны со вторыми входами соответственно пятого и шестого узлов перемножения (26) и (27).
Гетеродин (1) выполнен на диоде Ганна и служит для образования промежуточной частоты в обоих приемных каналах. Смесители (2), (3) представляют собой балансные диодные смесители СВЧ и предназначены для преобразования поступающих с выхода антенны сигналов в сигналы промежуточной частоты. Оптимальные фильтры (4), (5) имеют полосы пропускания 5 мГц, средние частоты 30 мГц и служат для выделения полезного сигнала из шумов, для повышения соотношения сигнал/шум. Детекторы (8), (9) - амплитудные диодные, выделяют огибающую сигнала. Узлы деления (12), (13), (14), (15), (23), (25), узлы перемножения (20), (21), (26), (27), узлы суммирования (10), (18), (24) и узлы вычитания (11), (16), (28) стандартные, выполнены на микросхемах серий 525ПС1 и 574УД1. Линейные УПЧ (6), (7) выполнены на микросхемах серии 265УВЧ и 265УВ5.
Узел деления (13) резисторный с коэффициентом деления
µ=2aθ0, где 
Δθш - угол раствора ДН по точкам половинной мощности;
θ0 - угол между РСН и направлением максимума ДН.
Узлы перемножения (19), (22) - усилители с коэффициентами усиления соответственно 2а и (-2а), выполнены на микросхемах серии 574УД1. Источник опорного напряжения (17) выполнен в виде резисторного делителя, подключенного к блоку питания. Напряжение на выходе делителя равно θ0.
Прием отраженных от цели сигналов ведется при помощи антенной системы, формирующей в координатной плоскости два луча, отклоненных от равносигнального направления на угол ±θ0. С выхода антенн сигналы поступают в приемные каналы, где преобразуются в сигналы ПЧ в смесителях (2), (3), фильтруются в (4), (5), усиливаются на ПЧ в (8), (7), детектируются в (8), (9), затем в блоках (10) и (11) образуется их сумма и разность соответственно, которые поступают в узел деления (12). На его выходе получаем сигнал
S(θ)=µθ,
характеризующий угол отклонения цели от РСН (см. А.И. Леонов, К.И. Фомичев, "Моноимпульсная радиолокация", стр. 27, форм. (1.39), на выходе узла деления (13) сигнал

В узлах суммирования (18) и вычитания (16) образуются сигналы
(θ0+θ) и (θ0-θ),
после усиления которых в узлах (22) и (19) соответственно получаем напряжения, характеризующие соответственно значения µ2, µ1 крутизны диаграммы направленности в направлении θ. В узлах перемножения (20) и (21) образуются напряжения, характеризующие 





Полученная таким образом оценка угла отклонения цели является более точной по сравнению с получаемой в известном устройстве за счет учета крутизны диаграмм в направлении, близком к реальному положению цели.
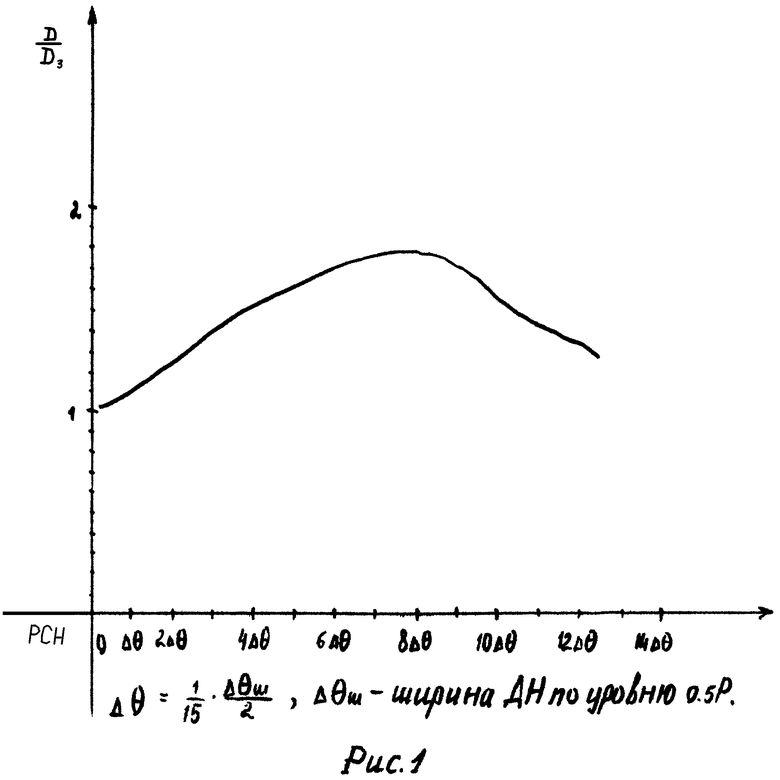
Как показывают результаты моделирования, предлагаемый итерационный измеритель повышает точность измерения угловых координат по сравнению с прототипом. На рис. 1 приведен график зависимости отношения дисперсий ошибки измерения угловой координаты в зависимости от угла отклонения пели от РСН в прототипе и в заявляемом измерителе. Расчеты выполнены для диаграммы направленности типа
для случайных выборок сигнала с релеевским распределением амплитуд. Расчеты проводились на ЦВМ БЭСМ-6.
Из графиков следует, что предлагаемый итерационный измеритель эффективнее по сравнению с прототипом и позволяет почти полностью избавиться от ошибки измерения угловых координат, получаемой за счет использования в неследящих амплитудных измерителях аппроксимации диаграмм, привязанное к точке РСН.
Так, например, при отклонении цели от РСН на угол, равный θ0/2, дисперсия ошибки измерения уменьшается почти в 2 раза (при Δθ0≈2°).
Повышение точности обеспечивает более высокую экономичность РЛС по отношению к расходуемой мощности и уменьшение времени обработки сигналов за счет того, что для обеспечения заданной точности измерения координат целей не требуется дополнительное зондирование или наращивание мощности РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОВМЕСТНОГО МОНОИМПУЛЬСНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ПРИНИМАЕМОГО СИГНАЛА И ПЕЛЕНГА ИСТОЧНИКА ЭТОГО СИГНАЛА | 2012 |
|
RU2492500C1 |
| СПОСОБ РАЗДЕЛЬНОГО ФОРМИРОВАНИЯ НУЛЕЙ В СУММАРНОЙ И РАЗНОСТНОЙ ДИАГРАММАХ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2269846C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| СПОСОБ РАЗДЕЛЬНОГО ФОРМИРОВАНИЯ НУЛЕЙ В СУММАРНОЙ И РАЗНОСТНОЙ ДИАГРАММАХ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2273922C1 |
| МОНОИМПУЛЬСНОЕ ФАЗОВОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ | 2007 |
|
RU2344434C1 |
| Способ обзора пространства | 2017 |
|
RU2666763C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| СПОСОБ РАЗДЕЛЬНОГО ФОРМИРОВАНИЯ НУЛЕЙ В СУММАРНОЙ И РАЗНОСТНОЙ ДИАГРАММАХ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2001 |
|
RU2195054C2 |
| СПОСОБ РАЗДЕЛЬНОГО ФОРМИРОВАНИЯ НУЛЕЙ В СУММАРНОЙ И РАЗНОСТНОЙ ДИАГРАММАХ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНЫХ АНТЕННЫХ РЕШЕТОК | 1997 |
|
RU2133529C1 |
| УГЛОВОЙ СЕЛЕКТОР ДЛЯ РЛС С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 1997 |
|
RU2160906C2 |
Изобретение относится к области радиолокации и предназначено для использования в моноимпульсных радиолокационных станциях. Достигаемый технический результат - повышение точности измерения угловых координат. Указанный результат достигается за счет того, что радиопеленгатор содержит два приемных канала, каждый из которых состоит из смесителя, оптимального фильтра, линейного усилителя промежуточной частоты и детектора, также содержит гетеродин, первый блок сложения, первый блок вычитания, первый блок деления, дополнительно также содержит пять блоков деления, шесть блоков перемножения, два блока сложения, два блока вычитания и источник опорного напряжения. Перечисленные средства определенным образом выполнены и соединены между собой. 2 ил.
Амплитудный неследящий итерационный радиопеленгатор для моноимпульсной радиолокационной станции, содержащий два приемных канала, каждый из которых состоит из последовательно соединенных смесителя, оптимального фильтра, линейного усилителя промежуточной частоты и детектора, также содержащий гетеродин, первый блок сложения, первый блок вычитания и первый блок деления, причем выход гетеродина соединен со вторыми входами обоих смесителей, выход детектора первого приемного канала соединен с первыми входами первого блока сложения и первого блока вычитания, выход детектора второго приемного канала соединен со вторыми входами первого блока сложения и первого блока вычитания, выходы которых соединены соответственно, с первым и вторым входами первого блока деления, отличающийся тем, что, с целью повышения точности измерения угловых координат, в него введены пять блоков деления, шесть блоков перемножения, два блока сложения, два блока вычитания и источник опорного напряжения, причем выход первого блока деления соединен со входом второго блока деления, выход которого через последовательно соединенные второй блок вычитания, первый блок перемножения и пятый блок деления, связан с первым входом пятого блока перемножения, выход второго блока деления через последовательно соединенные второй блок сложения, второй блок перемножения и шестой блок деления связан с первым входом шестого блока перемножения, выход источника опорного напряжения соединен со вторыми входами второго блока вычитания и второго блока сложения, выход первого блока перемножения соединен с первым и вторым входами третьего блока перемножения, выход которого соединен с первым входом третьего блока сложения, выход второго блока перемножения соединен с первым и вторым входами четвертого блока перемножения, выход которого соединен со вторым входом третьего блока сложения, выход третьего блока сложения соединен со вторыми входами пятого и шестого блоков деления, выход первого блока суммирования через третий блок деления связан со вторым входом пятого блока перемножения и через четвертый блок деления связан со вторым входом шестого блока перемножения, выходы пятого и шестого блоков перемножения соединены соответственно с первым и вторым входами третьего блока вычитания, выход детектора первого приемного канала соединен со вторым входом третьего блока деления, выход детектора второго приемного канала соединен со вторым входом четвертого блока деления.
| А.И | |||
| Леонов, К.И | |||
| Фомичев, "Моноимпульсная радиолокация", изд | |||
| «Сов | |||
| Радио», М., 1970 г., стр | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |

