Настоящее изобретение относится к радиотехнике, а именно к способу моноимпульсного измерения частоты принимаемого сигнала и пеленга источника этого сигнала.
Известные способы моноимпульсного пеленгования (МП) предусматривают формирование нескольких пар диаграмм направленности (ДН), попарное вычитание сигналов, принятых антеннами МП по этим ДН, и формирование разностного сигнала UA=U1-U2, который нормируют к суммарному сигналу UΣ=U1+U2. Нормированный разностный сигнал используют для оценки отклонения угла прихода принимаемого сигнала Θ относительно равносигнального направления (РСН) в соответствии с формулой

где К - крутизна пеленгационной характеристики, которая зависит от частоты принимаемого сигнала. Для измерения частоты обычно используют цифровые частотомеры (патент РФ 2287839 от 24.06.2004) или аналоговые частотомеры
(ELINT: the integration and analysis of radar signals, стр.117, стр.462, 2006 ARTECH HOUSE, inc.).
Наиболее близким по технической сущности к предлагаемому способу является способ моноимпульсного пеленгования (А.И. Леонов, К.И. Фомичев. Моноимпульсная радиолокация, М.:"Радио и связь". 1984 г., стр.95), состоящий в формировании пеленгационного канала при помощи двух антенн с разнесенными ДН, пересекающимися на РСН, приеме сигнала от источника радиосигнала (ИРС) и формировании суммарного и разностного сигналов.
Известный способ реализуется устройством (патент 2287839, Россия), которое содержит два приемных тракта, каждый из которых содержит последовательно включенную приемную антенну, усилитель высокой частоты, делитель мощности, один из выходов которого соединен с частотомером, а другие выходы с последовательно соединенными амплитудными детекторами, видеоусилителями и аналого-цифровыми преобразователями (АЦП), выходы усилительных трактов и частотомера подключены к вычислителю. Нормированное отношение разности принятых сигналов, с учетом частоты принятого сигнала, определяет пеленг ИРС.
Недостатком известного способа и реализующего его устройства является низкая точность оценки пеленга ИРС амплитудным методом, обусловленная наличием пространственного разноса приемных антенн, неидентичностью их ДН и низким быстродействием сложного измерителя частоты (см., например, Соловов В.Я. Фазовые измерения. М.: "Связь", 1977 г., стр.254).
1. Для устранения этих недостатков предложен способ одновременного определения частоты принимаемого сигнала и пеленга источнка радиосигнала (ИРС), состоящий в формировании на одной антенной решетки (АР) двух пар днаграммм ДН, пересекающихся на общем РСН МП так, что нормированный уровень пересечения первой пары ДН не зависит от частоты ИРС, а нормированный уровень пересечения второй пары ДН зависит от частоты, отношение уровня пересечения второй пары ДН к уровню пересечения первой пары ДН является функцией частоты.
О частоте принимаемого сигнала судят по величине отношения уровней пересечения ДН, а о направлении прихода сигнала судят по величине нормированной разности принимаемых сигналов с учетом частоты принимаемого сигнала.
Сущность предложенного технического решения связана со способом одновременного определения частоты принимаемого сигнала и пеленга источника этого сигнала, состоящем в приеме сигнала N-элементной антенной решеткой и формировании двух пар ДН, пересекающихся на РСН путем деления сигнала, принятого каждым элементом антенной решетки на три составные группы (левая, правая и средняя). Среднюю группу составляющих сигнала используют для формирования первой пары ДН, образующих ДН опорного пеленгационного канала, принимающих левой ДН сигнал U0L и правой ДН сигнал U0R. Нормированный уровень пересечения этих ДН не зависит от частоты принимаемого сигнала. В составляющие левой и правой групп сигналов вводятся равные по величине и противоположные по знаку фазовые сдвиги и полученные составляющие сигналов суммируются для формирования второй пары ДН принимающих левой ДН сигнал U1L и правой ДН сигнал U1R, нормированный уровень пересечения которых зависит от частоты принимаемого сигнала. Частоту принимаемого сигнала определяют по отношению сумм составляющих сигналов, принятых ДН измерительного и опорного каналов.
F=1(U1L+U1R)/(U0L+U0R).
Опорное и измерительное значения пеленга источника принятого сигнала определяют по отношению разности составляющих сигналов, принятых левой и правой диаграммами направленности опорного и измерительного каналов
Θоп=К2(UOL-UOR)/(UOL+UOR)
Θизм=К3(U1L-U1R)/(U1L+U1R)
По отношению разностного и суммарного сигналов и выбранным по измеренной частоте пеленгационным характеристикам определяются значения пеленга измерительным Θизм и опорным Θоп каналами, различающиеся кроме уровней измеряемых сигналов но и своей статистикой, т.к. отношения сигнал/шум при измерениях различны. Усреднение полученных значений Θоп и Θизм дает уточненное значение пеленга источника принятого сигнала.
Сигнал, принятый каждым элементом антенной решетки, делится на три части разветвителями, имеющими один вход и три синфазные выхода. Выходы разветвителей создают три группы сигналов: левую, среднюю и правую. Левая и правая группы содержат последовательно соединенные фазовращатели и сумматоры, выходы которых подключены к первому суммарно-разностному устройству, усилителям ВЧ, выходы которых через смесители, с общим гетеродином, соединены с АЦП и вычислителем частоты и пеленга.
Средняя группа выходов разветвителей подключена к диаграммообразующей схеме (ДОС) с N входами и двумя выходами, выходы ДОС через последовательно соединенные усилитель, смеситель с общим гетеродином и АЦП соединены с вычислителем частоты и пеленга (фиг.1).
Технический результат, достигаемый использованием предложенного способа, состоит в повышении быстродействия совместного мгновенного определения частоты принимаемого сигнала и пеленга ИРС, повышении точности пеленга и упрощении реализующего его устройства, так как такое устройство не требует использования отдельного частотомера.
Сущность изобретения поясняется чертежами и диаграммами.
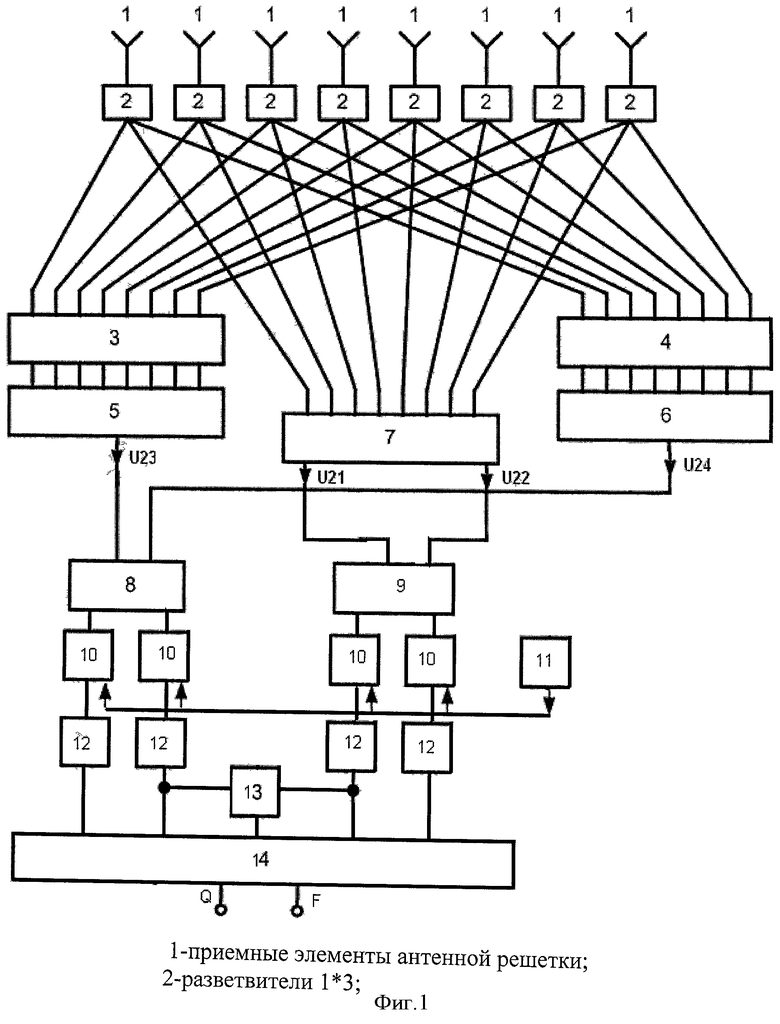
На фиг.1 представлена структурная схема МП с восьмиэлементной антенной решеткой.
На фиг.2 представлены ДН опорного и измерительного каналов при средней частоте рассматриваемого диапазона.
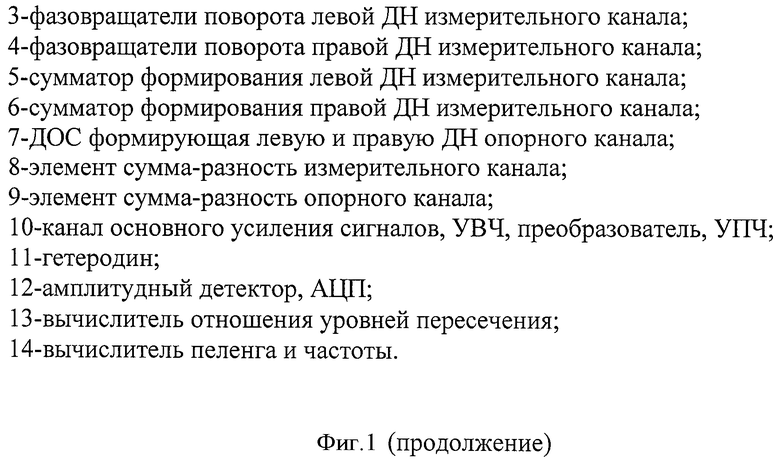
На фиг.3 представлены ДН опорного и измерительного каналов при увеличении частоты от среднего значения.
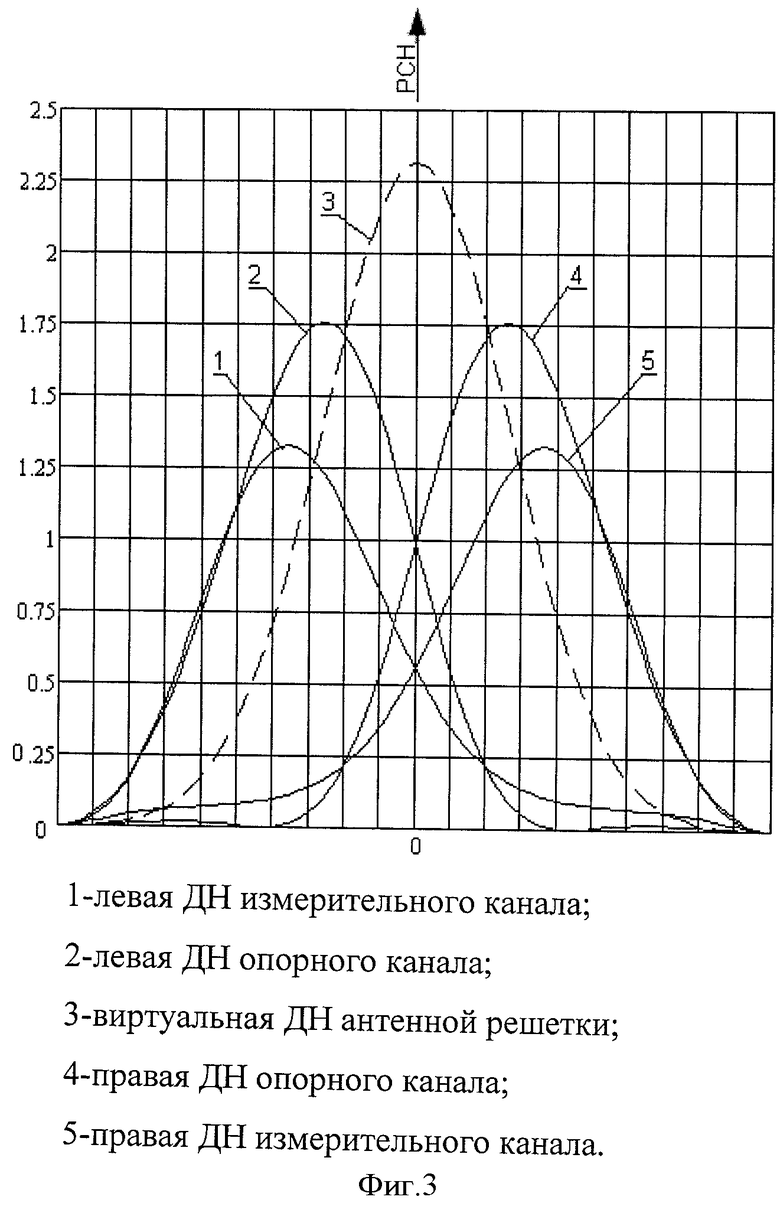
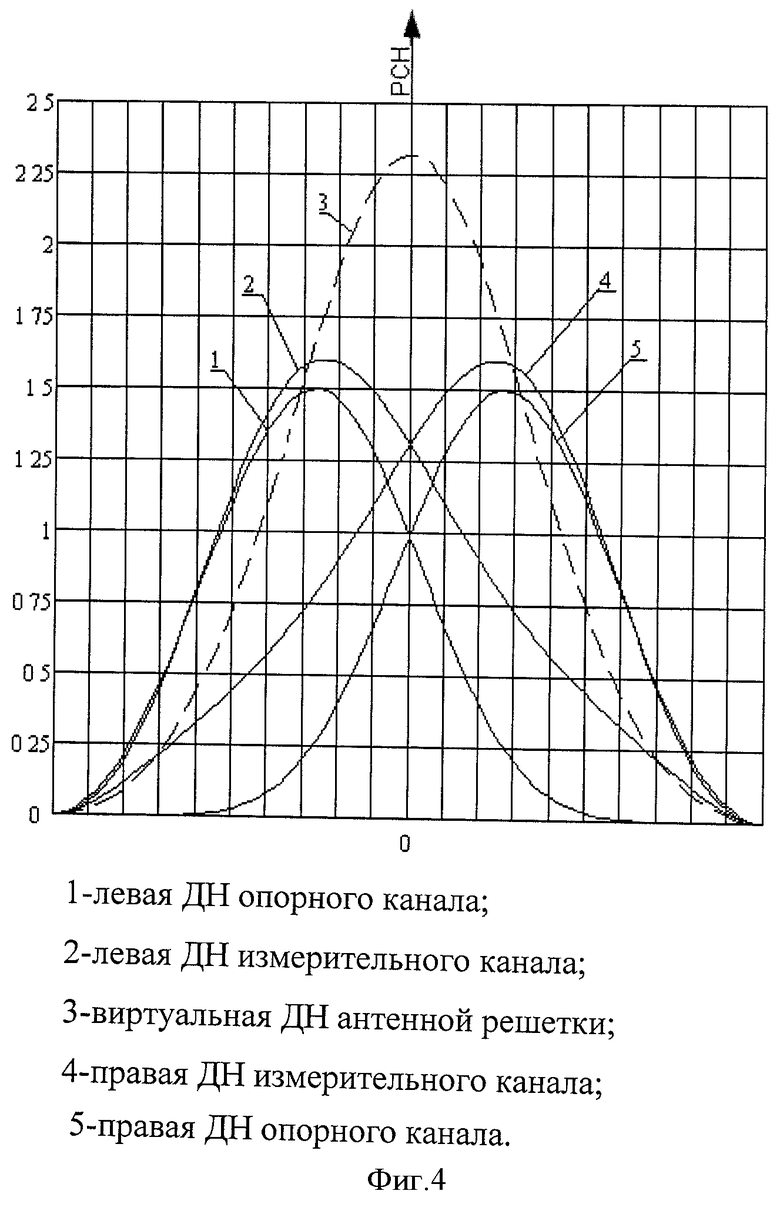
На фиг 4. представлены ДН опорного и измерительного каналов при уменьшении частоты от среднего значения.
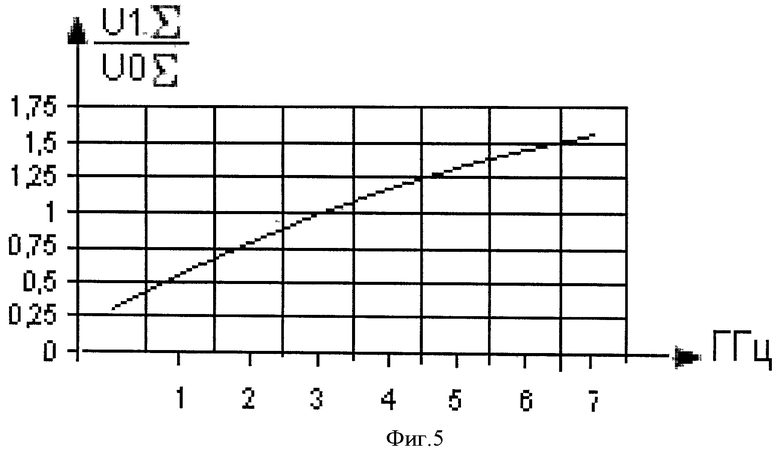
На фиг.5 представлен график зависимости отношения уровней пересечения ДН измерительного и опорного каналов от частоты принимаемого сигнала.
Предложенный способ реализуется устройством, структурная схема которого представлена на фиг.1. Это устройство состоит из антенной решетки, содержащей N приемных антенных элементов 1, разветвителей 2, фазовращателей поворота левой ДН измерительного канала 3, фазовращателей поворота правой ДН измерительного канала 4, сумматора левой ДН измерительного канала 5, сумматора правой ДН измерительного канала 6, диаграммообразующей схемы опорного канала 7, устройства сумма-разность измерительного канала 8, устройства сумма-разность опорного канала 9, канала усиления принятых сигналов 10, включающего: УВЧ, преобразователь, УПЧ, общий гетеродин 11, амплитудный детектор и АЦП 12, вычислитель отношения уровней пересечения ДН измерительного и опорного каналов 13, вычислитель частоты принимаемого сигнала и пеленга источника излучения 14.
Сигнал, принятый каждым элементом АР, делится разветвителями на три группы: левую, среднюю и правую. Сигналы средней группы используются для формирования ДН опорного канала МП, они поступают на ДОС, которая имеет N входов и два выхода, формирующую две ДН, расположенные симметрично слева и справа от РСН и пересекающиеся на РСН. Уровень пересечения нормированных ДН опорного канала не зависит от частоты принимаемого сигнала. Сигналы левой и правой групп выходов разветвителей используются для формирования ДН измерительного канала МП. Сигналы поступают, через левую и правую группы фазовращателей, соответственно на левый и правый сумматоры, которые имеют N входов и один выход, формирующие две ДН, развернутые относительно РСН, симметрично слева и справа, пересекающиеся на РСН, уровень пересечения нормированных ДН измерительного канала зависит от частоты принимаемого сигнала. Угол развертывания ДН измерительного канала выбирается так, чтобы уровень пересечения ДН, при средней длине волны рассматриваемого диапазона, был близок к уровню пересечения ДН опорного канала. При увеличении частоты (уменьшении длины волны) принимаемого сигнала уровень пересечения ДН измерительного канала, относительно уровня пересечения ДН опорного канала, снижается. При уменьшении частоты (увеличении длины волны) принимаемого сигнала уровень ДН измерительного канала, относительно уровня пересечения ДН опорного канала, возрастает. Отношение уровня пересечения ДН измерительного канала МП к уровню пересечения ДН опорного канала МП является функцией частоты принимаемого сигнала. По измеренному отношению уровня пересечения ДН измерительного канала к уровню пересечения ДН опорного канала определяется частота принятого сигнала. Пеленг измеряется опорным (Θоп) и измерительным (Θизм) каналами МП. Средневзвешенное, уточненное, значение пеленга ИРС (Θ) является пеленгом МП. В качестве ДОС и сумматоров используются диаграммообразующие схемы без потерь. Сигнал принимается антенной решеткой из N=8 (фиг.1) элементов. Сигнал от каждого элемента АР делится разветвителями на три равные части, формирующие три группы принятых сигналов: левую, среднюю и правую. Сигналы средней группы поступают ДОС, формирующую N ортогональных лучей (ДН) (Л.С. Бененсон, В.А. Журавлев, С.В.Попов, Г.А. Постнов. Антенные решетки. - М.: "Советское радио", 1966 г., 156), ДН k-го луча многолучевой решетки определяется выражением
где
ψk(u) - ДН k-го луча многолучевой антенной решетки;
k - номер луча;
θ - текущий угол;

N - количество лучей в решетке;
u - обобщенная угловая координата.
Для измерительного пеленгационного канала используют две ДН.
Первую ДН, расположенную слева от РСН (левую)
где -Δ - величина смещения ДН измерительного канала.
Вторую ДН, расположенную справа от РСН (правую)
Фазовращатели левой и правой групп разворачивают фронт падающей волны на углы -Δ и Δ соответственно и подключены к сумматорам, которые формируют левую и правую ДН измерительного канала.
Уровень пересечения левой и правой ДН опорного пеленгационного канала всегда лежит на РСН, он не зависит от частоты принимаемого сигнала и составляет -3,86 ДБ от максимума сигнала принимаемого АР, при использовании диаграммообразующей матрицы Батлера (Butler J., Lowe R. Beam forming matrix simplifies design of electronically scanned antennas. Electronic design, 1961, v.9, №8, p.170). Левая (Ψ01) и правая (Ψ02) ДН опорного канала имеют вид

Уровень пересечения левой и правой ДН измерительного канала всегда лежит на РСН, его уровень зависит от частоты принимаемого сигнала. Углы -Δ и Δ выбраны так, чтобы уровень пересечения левой и правой ДН измерительного канала при средней частоте рассматриваемого диапазона (f=Fср, D=λcp/2) был близок уровню пересечения ДН опорного канала (фиг.2). При увеличении частоты принимаемого сигнала от среднего значения уровень пересечения ДН снижается (фиг.3) при уменьшении частоты, уровень пересечения ДН увеличивается (фиг.4). Отношение уровней пересечения ДН измерительного и опорного каналов на РСН является функцией частоты. На линейном участке ДН отношение уровней пересечения (U) вычисляется из простого выражения

где U0L - сигнал, принятый левой ДН опорного канала,
U0R - сигнал, принятый правой ДН опорного канала,
U1L - сигнал, принятый левой ДН измерительного канала,
U1R - сигнал, принятый правой ДН измерительного канала.
В общем случае необходимо учитывать нелинейность ДН, например, с помощью априорно разработанных таблиц. По определенной частоте выбирают пеленгационные характеристики, определяют пеленги Θоп и Θизм.
Значения Θизм и Θоп усредняют и определяют пеленг МП Θ. Предлагаемый способ может быть легко реализован на основе серийно выпускаемых элементов.
В качестве элементов антенной решетки 1 могут быть использованы вибраторные антенны [Проектирование антенно-фидерных устройств М.С. Жук, Ю.Б. Молочков, М.: "Энергия", 1966 г., с.517].
Разветвители 2 выполняются на полосковых устройствах [Справочник по элементам полосковой техники. Под редакцией А.Л. Фельдштейна, М.: "Связь", 1979, с.517].
Фазовращатели 3 и 4 выполняются на последовательно соединенных не связанных и связанных отрезках кабеля разной длины РК-50-22 ГОСТ [Сканирующие антенные системы СВЧ. Перевод под редакцией Г.Т. Маркова и А.Ф. Чаплина, М.: "Советское радио", 1971 г., с.260].
Сумматоры 5 и 6, диаграммообразующая схема 7 и устройство сумма-разность 8 выполняются на полосковых устройствах [Справочник по элементам полосковой техники. Под редакцией А.Л. Фельдштейна, М.: "Связь", 1979, с.165].
Канал усиления сигналов 10, 11, 12 выполняется в соответствии с рекомендациями справочного пособия по разработке электронных схем [Искусство схемотехники П. Хорвин, У. Хилл, М.: "МИР", т.2, 1986 г., с.302].
Аналого-цифровые преобразователи 12 выполняются на серийно выпускаемых микросхемах К572ПВ1 [Аналоговые и цифровые интегральные микросхемы. Под редакцией С.В. Якубовского, М.: "Радио и связь", 1985 г., с.357].
Вычислители 13 и 14 выполняются на инструментальном комплекте Spartan-3 Kit [Проектирование встраиваемых микропроцессорных систем на основе ПЛИС. М.: "Горячая линия-Телеком", 2006 г., с.387].
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| Способ определения координат целей с помощью аппроксимированной пеленгационной характеристики | 2021 |
|
RU2777849C1 |
| Способ определения направления на цель цифровой антенной решеткой моноимпульсной радиолокационной станции | 2021 |
|
RU2761106C1 |
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР РАДИОСИГНАЛОВ | 2003 |
|
RU2267134C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ И ПЕЛЕНГАТОР | 2010 |
|
RU2434240C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |

Изобретние относится к радиотехнике, а именно к способу моноимпульсного определения частоты принимаемого сигнала и пеленга источника этого сигнала. Технический результат, достигаемый при использовании предложеного способа, состоит в повышении быстродействия совместного мгновенного определения частоты принимаемого сигнала и пеленга источника этого сигнала, повышении точности определения пеленга и упрощении реализации способа. Предложенный способ предусматривает использование многоэлементной антенной решетки с двумя диаграммами направленности, сформированными симметрично относительно равносигнального направления. Частоту принимаемого сигнала и пеленг источника этого сигнала определяют по нормированным уровням пересечения указанных диаграмм направленности. 5 ил.
Способ одновременного мгновенного определения частоты и пеленга принимаемого сигнала, заключающийся в приеме сигнала N элементной антенной решеткой (АР), формировании двух диаграмм направленности (ДН), пересекающихся на равносигнальном направлении (РСН), обработке суммарно-разностным устройством, оценке пеленга по отношению разностного и суммарного сигналов, отличающийся тем, что на одной антенной решетке формируют две пары ДН, пересекающиеся на РСН, путем деления сигнала, принятого каждым элементом АР, на три группы: левую, правую и среднюю, причем среднюю группу используют для формирования первой пары ДН, для опорного пеленгационного канала, принимающих левой ДН сигнал U0L и правой ДН сигнал U0R, нормированный уровень пересечения которых не зависит от частоты принимаемого сигнала, в левую и правую группы вводят дополнительные, противоположные по знаку, фазовые сдвиги и полученные сигналы суммируют, при формировании второй пары ДН, для измерительного пеленгационного канала, принимающих левой ДН сигнал U1L и правой ДН сигнал U1R, нормированный уровень пересечения второй пары ДН зависит от частоты принимаемого сигнала, частота принимаемого сигнала определяется по отношению уровней пересечения ДН измерительного и опорного каналов, пеленг источника излучения определяется после сумма-разностной обработки, измерительным и опорным пеленгационными каналами при определенной частоте принимаемого сигнала, средневзвешенное значение пеленга измерительного и опорного каналов принимается за уточненное значение пеленга моноимпульсного пеленгатора.
| ЛЕОНОВ А.И., ФОМИЧЕВ К.И | |||
| Моноимпульсная радиолокация | |||
| - М.: Радио и связь, 1984, с.95 | |||
| СПОСОБ ФОРМИРОВАНИЯ ПРИЕМНЫХ ДИАГРАММ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ АНТЕННОЙ СИСТЕМЫ И МОНОИМПУЛЬСНАЯ АНТЕННАЯ СИСТЕМА | 2006 |
|
RU2316860C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1991 |
|
RU2076334C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2321014C2 |
| ПЕЛЕНГАТОР В ДВУХ ПЛОСКОСТЯХ | 1998 |
|
RU2134430C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
| US 6069582 A, 30.05.2000 | |||
| US 4905010 A, 27.02.1990 | |||
| JP 2010223895 A, 07.10.2010 | |||
| Картофелеуборочная машина | 1930 |
|
SU26134A1 |

