Изобретение относится к угловым селекторам (УС) радиолокационных сигналов и предназначено для РЛС с фазированной антенной решеткой (ФАР), осуществляющей электронное управление (сканирование) равносигнальным направлением (РСН) относительно неподвижной решетки.
УС стробирует для работы лишь часть пеленгационной характеристики (ПХ) РЛС вокруг РСН, соответствующую, например, диапазонам ее угловой линейности, однозначности, устойчивости или эффективной ширине диаграммы направленности (ДН) ФАР.
Угловые размеры всей главной равносигнальной зоны ПХ ΔΘ0 обратно пропорциональны отношению диаметра ФАР d к длине λ(ΔΘ0 = 1/(d/λ)). В результате, при ограниченных размерах d и фиксированной λ величина ΔΘ0 оказывается избыточной, особенно в бортовых РЛС, что ухудшает их разрешающую способность (р/с) по угловым координатам и помехозащищенность (п/з) к воздействию за пределами рабочей части ПХ (например, А. И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация, М., Сов. радио, 1984 г., гл. 5, стр. 93 - 95).
Уже известны УС для РЛС, содержащие дополнительные приемники радиолокационных сигналов с ДН антенн специальной формы, а также устройства для компенсации или блокировки мешающих сигналов за пределами рабочего диапазона углов (например: Защита от радиопомех, под. ред. М.В.Максимова, М., Сов. радио, 1976 г., гл. 5, раздел 5.2, рис. 5.15 на стр. 214, а также Ю.Я.Комиссаров, С. С.Родионов. Помехоустойчивость и электромагнитная совместимость радиоэлектронных устройств, Киев, изд. Техника, 1978 г., гл. II, раздел 2, рис. 10 на стр. 39 и др.).
Однако, сопряжение ДН основной и вспомогательной антенн во всем диапазоне углов отклонения РСН (например, -60° ≤ Θ0 ≤ 60°) труднодостижимо, особенно для ФАР с электронным сканированием РСН, изменяющим параметры ДН и ПХ, а следовательно, р/с и п/з известного УС.
Кроме того, реализация данного УС в РЛС ведет к существенному увеличению массо-габаритных параметров и потребляемой мощности.
Известны также УС для РЛС, представляющие собой ограничители релейного типа или насыщения, включаемые последовательно с выходом РЛС для сигнала ΔU оценки отклонения Θ цели от РСН (например: Зашита от радиопомех, под.ред. М. В. Максимова, М., Сов. радио, 1976 г., рис. 7.22 а и б на стр. 359, а также патент РФ N 2032914 по заявке N 5040129 от 27.04.92 г., G 01 S 7/36). Р/с и п/з известных УС применительно к РЛС с подвижными антеннами и управляемыми механически не зависят от угла отклонения РСН, поскольку оно перемещается вместе с антенной и не меняет своего положения относительно нормали к раскрыву.
Однако, в РЛС с ФАР в результате отклонения РСН от нормали к раскрыву решетки (Θ0 ≠ 0) угловые размеры основного луча ДН и главной равносигнальной зоны ПХ увеличиваются, а крутизна ПХ уменьшается пропорционально cosΘ0 (например, Теоретические основы радиолокации, под.ред. Д.Е.Дулевича, М., Сов. радио, 1978 г., стр. 258 - 380 и др.).
В результате, с увеличением Θ0 угловой строб в пределах установленного порога |ΔU| < Uп, где Uп=const, расширяется, что ухудшает р/с и п/з УС.
Наиболее близким по технической сущности к заявляемому является УС для РЛС, служащий ограничителем релейного типа, со входами для источника порогового напряжения Uп и для сигнала ΔU оценки угла отклонения Θ цели от РСН, последним подключенный к выходу РЛС для данного сигнала (Защита от радиопомех под. ред. М. В. Максимова, М., Сов. радио, 1976 г., рис. 7.22б на стр. 359).
Выходной сигнал УС ΔU* формируется по следующей логике
Недостатками известного УС для РЛС с ФАР является снижение его р/с и п/з при отклонении РСН от нормали к раскрыву ФАР из-за увеличения размеров углового строба.
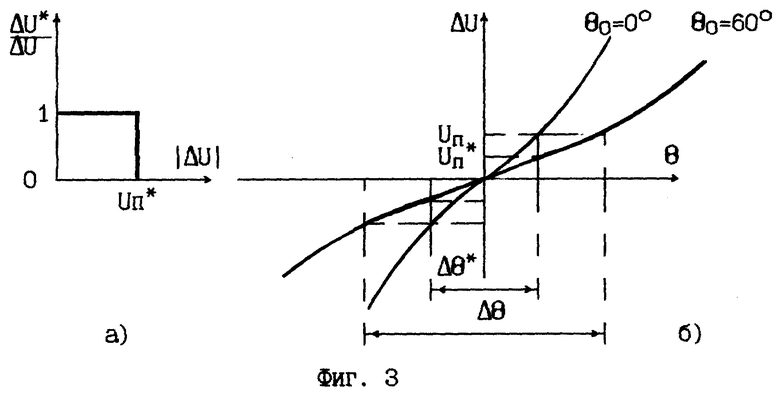
На фиг. 3а изображена амплитудная характеристика УС для РЛС.
На фиг. 3б изображены угловые стробы для ПХ РЛС с ФАР для случая, когда РСН совпадает с нормалью к раскрыву ФАР (Θ0 = 0) и когда угол между ними составляет Θ0 = 60°.
Целью данного изобретения является устранение указанных недостатков, а именно, повышение р/с и п/з УС для РЛС с ФАР путем автоматической коррекции порогового напряжения Uп в соответствии со значением косинуса угла Θ0 смещения РСН от нормали к раскрыву ФАР.
Поставленная цель достигается тем, что в известном УС для РЛС с ФАР, служащим ограничителем релейного типа со входами для источника порогового напряжения и для сигнала оценки угла отклонения цели от РСН, подключенного последним к выходу РЛС для указанного сигнала, вход УС для источника порогового напряжения через блок сопряжения соединен с выходом РЛС для сигнала оценки направляющего косинуса угла отклонения РСН от плоскости раскрыва ФАР.
УС для РЛС с ФАР по п. 1 отличается также тем, что он содержит решающее устройство (РУ) с пороговым и сигнальным входами, определитель модуля и ключ, управляющий вход которого соединен с выходом РУ, причем, пороговый вход РУ является входом УС для порогового напряжения, а сигнальный вход РУ через определитель модуля соединен со входом УС для сигнала оценки угла отклонения цели от РСН, который через указанный выше ключ соединен также с выходом УС.
УС для РЛС с ФАР по п.п. 1 и 2 отличается также тем, что в нем блок сопряжения содержит преобразователь сигнала оценки направляющего косинуса угла отклонения РСН от плоскости раскрыва ФАР в сигнал оценки направляющего косинуса угла отклонения РСН от нормали к плоскости раскрыва ФАР, выход которого объединен с выходом источника порогового напряжения через умножитель.
Введенные отличия устраняют зависимость размеров углового строба, а следовательно, р/с и п/з углового селектора от угла Θ0 отклонения РСН от нормали к раскрыву ФАР, путем соответствующей автоматической коррекции порогового напряжения.
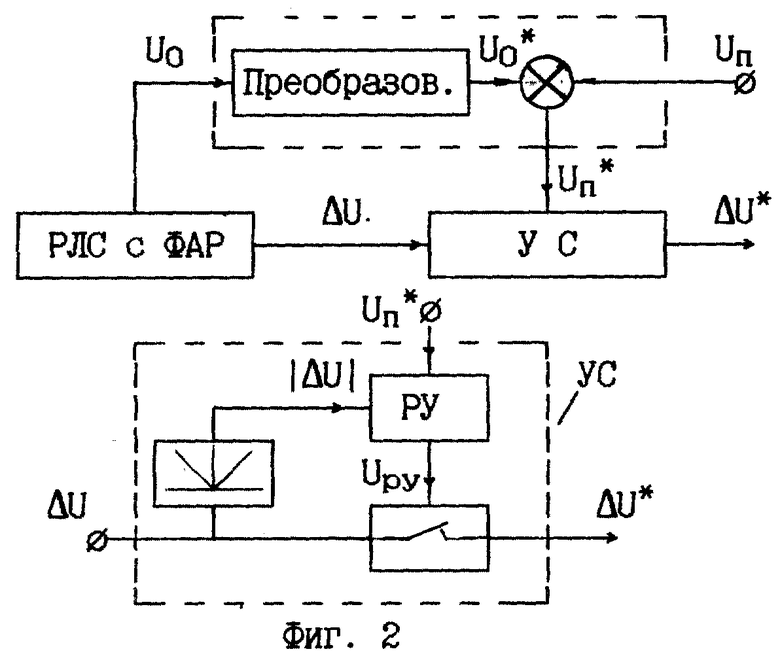
Функциональные схемы известного и предложенного УС для РЛС с ФАР изображены на фиг. 1 и 2 соответственно. На фиг. 3а изображена амплитудная характеристика УС, а на фиг. 3б - угловые стробы для ПХ РЛС с ФАР для случая, когда РСН совпадает с нормалью к раскрыву ФАР (Θ0 = 0) и когда угол между ними составляет Θ0 = 60° для фиксированного значения порога Uп. На данном чертеже показано также скорректированное значение порога U
Предложенный УС содержит определитель модуля сигнала |ΔU|, ключ и решающее устройство (РУ). РУ служит для индикации превышения входным сигналом ΔU порогового напряжения
Определитель модуля |ΔU| обеспечивает угловое стробирование для положительных и отрицательных значений угла отклонения Θ, как показано на рис. 3а, б.
РЛС с ФАР служит для формирования сигнала ΔU оценки отклонения Θ цели от РСН, а также сигнала оценки направляющего косинуса угла отклонения РСН от плоскости раскрыва ФАР Uо=sin Uо.
Блок сопряжения УС с РЛС содержит преобразователь сигнала U0 = sinΘ0 в сигнал оценки направляющего косинуса угла отклонения РСН от нормали к раскрыву ФАР U
Uо *=cos (arcsin Uо).
Блок сопряжения содержит также умножитель выходного сигнала указанного преобразователя Uо * и порогового напряжения Uп, т.е. Uп *=Uо *•Uп.
РЛС с ФАР известны, например, по научно-технической литературе (Теоретические основы радиолокации под ред. В.Е. Дулевича, М., Сов. радио, 1978 г. , гл. 10, рис. 10.3 на стр. 292 и гл. 13, рис. 13.1 на стр. 363, а также А. А.Коростылев. Пространственно-временная теория радиоустройств, м., Радио и связь, 1987 г., гл. 8, рис. 8.4 на стр. 267 и рис. 8.18 на стр. 298 и др.).
Определитель модуля, ключ, решающее устройство и умножитель, являющиеся типовыми элементами радиоприемных устройств в предложенном УС, используются по своему прямому назначению и могут быть заимствованы на книги "Проектирование радиолокационных приемных устройств", под ред. М.А.Соколова, М., Высшая школа, 1984 г., стр. 28 - 42 рис. 1.16, 1.13, 1.36, 1.10, соответственно.
Преобразователь тригонометрической функции
U
Предложенный УС для РЛС с ФАР работает следующим образом.
Формируемые РЛС сигналы ΔU оценки углового отклонения θ цели от РСН поступают на вход УС для соответствующего сигнала непосредственно, а сигналы U0 = sinΘ0/ оценки направляющего косинуса угла отклонения РСН от плоскости раскрыва ФАР поступают на вход УС для порогового сигнала через блок сопряжения, который обеспечивает преобразование его в сигнал U
Этот сигнал служит для коррекции порогового напряжения Uп посредством умножителя U
Сигналы ΔU через определить модуля, а сигнал Uп * непосредственно поступают на соответствующие входы решающего устройства (РУ), формирующего сигнал Uру управления ключом.
При |ΔU| < U
Таким образом, если РСН не совпадает с нормалью к раскрыву ФАР (Θ0 ≠ 0), то наряду с изменением крутизны ПХ c cosΘ0 раз (ΔU = μΘ•cosΘ0) (где μ- крутизна ПХ при Θ0 = 0) автоматически изменяется и пороговое напряжение U
В результате, размеры углового строба при Θ0 ≠ 0 не увеличиваются, а сохраняются неизменными, как и при Θ0 = 0 (фиг. 3б, ΔΘ*).
Технический эффект от реализации данного УС в РЛС с ФАР заключается в существенном повышении его р/с и п/з за счет устранения зависимости размеров углового строба от углового смещения Θ0 РСН от нормали к раскрыву ФАР. Так, для Θ0 = 60° достижимый положительный эффект равен двум.
Угловой селектор для РЛС с фазированной антенной решеткой (ФАР), являющийся ограничителем релейного типа со входами для источника порогового напряжения и для сигнала оценки угла отклонения цели от равносигнального направления (РСН), измеряемого РЛС. Технический результат - повышение разрешающей способнсти и помехозащищенности при угловом смещении θ0 РСН от нормали к раскрыву ФАР, для чего введен блок сопряжения углового селектора с РЛС, служащий для автоматической коррекции порогового напряжения по закону cosθ0. 3 ил.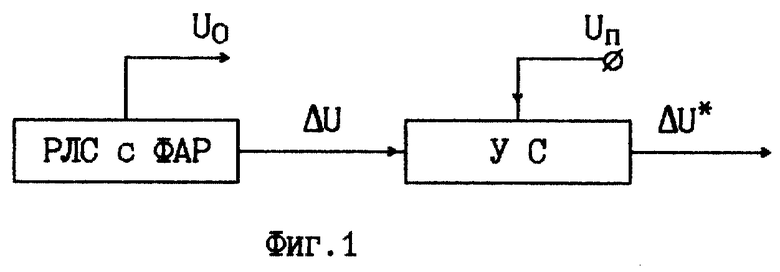
Угловой селектор для РЛС с фазированной антенной решеткой (ФАР) со входами для источника порогового напряжения и для сигнала оценки угла отклонения цели от равносигнального направления (РНС), содержащий преобразователь сигнала оценки направляющего косинуса угла отклонения РНС от плоскости раскрыва ФАР в сигнал оценки направляющего косинуса РНС от нормали к плоскости раскрыва ФАР, соединенный с выходом РЛС для сигнала оценки направляющего косинуса угла отклонения РНС от плоскости раскрыва ФАР, выход упомянутого проебразователя и выход источника порогового напряжения через умножитель соединены с пороговым входом решающего устройства, сигнальный вход которого через определитель модуля соединен со входом углового селектора для сигнала оценки угла отклонения цели от РНС, подключенным к выходу РЛС для указанного сигнала, выход решающего устройства соединен с управляющим входом ключа, а вход углового селектора для сигнала оценки угла отклонения цели от РНС через ключ соединен с выходом углового селектора.
| ДВУХДИАПАЗОННЫЙ МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1992 |
|
RU2032914C1 |
| RU 94022329 A1, 27.05.1996 | |||
| Объемный насос | 1986 |
|
SU1402711A2 |
| US 4214244 A, 22.07.1980 | |||
| US 4467328 A, 21.08.1984. | |||

