Предлагаемое изобретение относится к области оптической техники, в частности, к оптическим устройствам поиска и может быть использовано в навигационных системах и в системах обнаружения объектов.
Известна система предупреждения, описанная в книге "Справочник по радиолокации", М. Скольник, том 4, "Сов. радио", 1978 г., с. 114. Система состоит из радиолокатора и спецвычислителя, в ней данные об азимуте и дальности, выдаваемые радиолокатором, запоминаются через заданные интервалы времени и после этого с помощью спецвычислителя определяется точка предельно возможного сближения и время прихода в эту точку.
Недостаток этой системы, также как и других подобных ей систем, заключается в том, что она не обеспечивает безопасности движения судов в сложных навигационных условиях из-за невозможности с помощью радиолокатора определить дальности до целей в ближней и мертвой зонах. Безопасность движения судов не может быть в достаточной мере обеспечена так же при наличии помех радиолокатору.
Известна система предупреждения столкновения, описанная в книге Г.Д. Соненберг, "Радиолокационные и навигационные системы", изд-во "Судостроение", Л., 1982 г., с. 348-353. Она состоит из радиолокатора, лага, гирокомпаса, блока автосопровождения и индикатора. Для оценки ситуации столкновения в блок автосопровождения поступает следующая информация: дистанция и пеленги на обнаруженные суда с радиолокатора, собственную скорость судна с лага, собственный курс судна с гирокомпаса. Блок автосопровождения по непрерывно поступающим текущим данным с радиолокатора осуществляет постоянное слежение за встречной целью и выдает данные в индикатор. В индикатор также вводятся данные о счисленном месте с информационной электронной карты. На экране индикатора на основании поступающих данных индицируется радиолокационная обстановка, вектор движения цели, символ, что она взята на автосопровождение и вектор движения собственного судна.
Известна также система предупреждения столкновений, взятая за прототип. Она состоит из двух оптических приемных устройств, жестко связанных с поворотным устройством, при этом инфракрасная энергия от излучающих объектов последовательно проходит внутри этих оптических приемных устройств через объективы, трапецеидальные диафрагмы полей зрения с встроенными волоконными выравнивателями, диски с интерференционными фильтрами, жестко связанные с поворотными устройствами, собирающие линзы, волоконные планшайбы на фотоприемники, причем выход фотоприемника 10 через выход оптического приемного устройства 1 соединен с входом селектора по длительности и амплитуде, первый выход которого через первый вход блока определения дальности соединен с первым входом вычислителя, имеющим выход, соединенный с первым входом умножителя, и второй вход, соединенный через второй вход блока определения дальности с первым выходом селектора длительности по амплитуде, вход которого через переменную линию задержки, вход оптического приемного устройства соединен с выходом фотоприемника, а второй выход соединен через второй вход корректора дальности со вторым входом вычитателя, имеющим первый вход, соединенный через первый вход корректора дальности со вторым выходом селектора по длительности и амплитуде и выход, соединенный с первым входом умножителя, имеющего второй вход, соединенный с выходом делителя, и выход, соединенный через дешифратор с многоадресным постоянным запоминающим устройством, первый выход корректора дальности, третий вход блока определения дальности соединены с входом вычитателя, выход которого соединен через выход блока определения дальности с шестым входом блока автосопровождения, а первый вход соединен с выходом умножителя и первый вход, соединенный с выходом умножителя, имеющим второй вход, соединенный через четвертый вход блока определения дальности, второй выход корректора дальности с выходом делителя, имеющим первый вход, соединенный с выходом одноадресного постоянного запоминающего устройства и второй вход, соединенный с выходом схемы совпадения, первый вход которой соединен с выходом счетчика, а второй вход через третий вход корректора дальности соединен с выходом жестко связанного с поворотным устройством оптических приемных устройств датчика пеленга, вышеупомянутый вход которого также соединен с пятым входом блока автосопровождения, и через вышеупомянутый третий вход корректора дальности с первым входом триггера, и через линию задержки с первым входом счетчика, имеющим второй вход, соединенный с выходом схемы совпадения, первый и второй входы которой соответственно соединены с выходом тактового генератора и выходом триггера, кроме того, выход блока автосопровождения соединен с входом индикатора, а первый, второй, третий и четвертый входы этого блока соединены соответственно с первым и вторым выходами радиолокатора, с выходом лага и выходом гирокомпаса.
Сущность работы устройства-прототипа основана на получении на выходах фотоприемников видеосигналов от наблюдаемого объекта, которые во времени отстоят друг от друга на интервал, пропорциональный дальности до объекта. Это достигается с помощью поворотного устройства оптических приемных устройств, осуществляющего вращение оптических приемных устройств, разнесенных друг относительно друга на 1 м. При этом обеспечивается жесткая связь между этими оптическими приемными и поворотными устройствами. На выходах фотоприемников образуются видеосигналы, которые соответственно поступают на вход селектора по длительности и амплитуде и через переменную линию задержки на вход селектора по длительности и амплитуде. Блок селекции по длительности и амплитуде выделяет видеосигналы от наиболее нагретой части судна, имеющей длительность, характерную для точечного излучателя. Информация о временном положении середин выделенных видеосигналов от одних и тех же излучателей поступает соответственно на первый и второй входы вычитателя и блока определения дальности. Затем определенная в блоке дальность корректируется по данным угломестного положения излучателя, определенным с помощью трапецеидальных диафрагм полей зрения с встроенными волоконными выравнивателями. В результате на выходах фотоприемников между серединами двух видеоимпульсов от одного и того же излучателя будет иметь место временное рассогласование, пропорциональное базовому расстоянию между объективами и обратно-пропорциональное их скорости вращения. Это временное рассогласование является функцией дальности до объекта.
Недостатками устройства-прототипа являются:
1. Неспособность его давать оператору неискаженное изображение наблюдаемых объектов, что снижает достоверность получаемой информации о навигационной обстановке и ведет к снижению безопасности движения судов.
2. Сложность технической реализации оптических приемных устройств, включающих в себя ряд сложных элементов, требующих тщательной юстировки и учета многих факторов (неравномерности освещенности в фокальной плоскости объектива, аберрационных искажений и т.д.).
Целью изобретения является увеличение безопасности движения судов за счет расширения функциональных возможностей системы при одновременном ее упрощении. Такая цель достигается тем, что в системе предупреждения столкновений, состоящей из лага, гирокомпаса, блока автосопровождения, двух оптических приемных устройств, поворотного устройства с датчиком пеленга, двух селекторов по длительности и амплитуде, переменной линии задержки, блока определения дальности, корректора дальности, индикатора, в оптических приемных устройствах фотоприемники выполнены в виде однорядовой матрицы из N дискретных фоточувствительных площадок, прилегающих друг к другу в осевом направлении, перпендикулярном вектору вращения поворотного устройства, при этом выходы первого и второго фотоприемников соединены соответственно с N входами введенных первого и второго электронных коммутаторов, управляющие входы которых параллельно соединены с первым и вторым выходами введенного синхронизатора, вход которого соединен с первым выходом датчика пеленга, первый сигнальный выход первого коммутатора соединен с первым входом введенного сумматора, а сигнальный выход второго коммутатора соединен с сигнальным входом через управляемую линию задержки, первый сигнальный выход которой соединен со вторым входом сумматора, выход которого соединен с первым сигнальным входом индикатора, второй сигнальный выход первого коммутатора соединен с первым входом введенного первого пространственного селектора (декоммутатора), а второй сигнальный выход управляемой линии задержки - с первым входом введенного второго пространственного селектора (декоммутатора), вторые входы пространственных селекторов через индикатор параллельно подключены к выходу введенного генератора стробов, вход которого соединен с выходом введенного кнюпельного механизма, третьи выходы пространственных селекторов подключены ко второму выходу датчика пеленга, а их выходы - соответственно с первыми входами селекторов по амплитуде и длительности, вторые входы которых соединены параллельно с третьим выходом датчика пеленга, первые выходы - соответственно с первым и вторым входами блока определения дальности, вторые выходы - соответственно с первым и вторым входами корректора дальности, второй выход которого соединен с третьим входом блока определения дальности, подключенным первым выходом к первому входу блока автоматического сопровождения, а вторым - к третьему входу индикатора, четвертый вход которого соединен с третьим выходом синхронизатора.
На чертеже фиг. 2 представлена структурная электрическая схема предлагаемой системы предупреждения столкновений.
Предлагаемая система состоит из двух оптических приемных устройств 1 и 2, жестко связанных между собой и с поворотным устройством 3 и содержащих соответственно объективы 4 и 5, наборы светофильтров 6 и 7, жестко связанных с поворотными устройствами 8 и 9, многоэлементные фотоприемники 10 и 11, установленные в фокальных плоскостях объективов 4 и 5, причем N-выходы фотоприемников 10-11 через N выходов соответственно первого и второго оптических приемных устройств 1 и 2 соединены соответственно с N входами первого и второго коммутаторов 12 и 13, управляющие входы которых параллельно соединены с первым и вторым входами синхронизатора 14, вход которого соединен с первым выходом датчика пеленга 15, первый сигнальный выход первого коммутатора 12 соединен с первым входом сумматора 16, а сигнальный выход второго коммутатора 13 соединен с сигнальным входом управляемой линии задержки 17, первый сигнальный выход которой соединен со вторым входом сумматора 14, индикатора 18, соединенным первым сигнальным входом с выходом сумматора 16, первого и второго пространственных селекторов (декоммутаторов) 19 и 20, сигнальные входы которых соединены соответственно с выходами коммутатора 12 и управляемой линии задержки 17, а управляющие входы - через индикатор 18 и генератор стробов 21 - с кнюпельным механизмом 22, а их выходы соединены с входами первого и второго селекторов по амплитуде и длительности соответственно 23 и 24, первые входы которых соединены соответственно с первым и вторым входами блока определения дальности 25, а вторыми выходами - соответственно с первым и вторым входами блока коррекции дальности 26, первый выход которого соединен с входом блока определения дальности 25, а второй - с управляющим входом управляемой линии задержки 17, блок определения дальности 25 первым выходом соединен с первым входом блока автоматического сопровождения 27, а вторым - с третьим входом индикатора 18, блок автоматического сопровождения 27 вторым, третьим и четвертым входами соединен соответственно с третьим выходом датчика пеленга 15, выходом ЛАГа 29 и выходом гирокомпаса 28.
Система работает следующим образом.
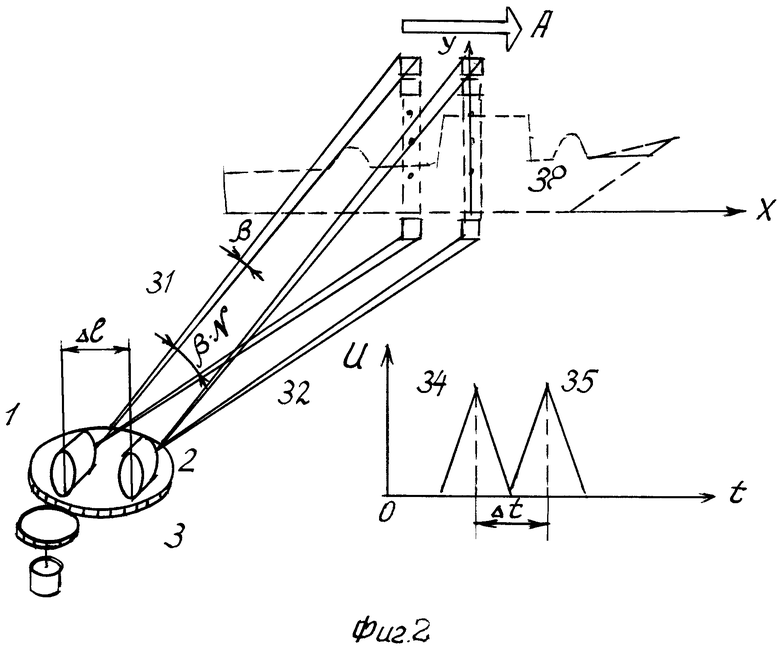
С помощью поворотного устройства 3 осуществляется вращение оптических приемных устройств 1 и 2, разнесенных друг относительно друга на расстояние Δl, равное, например, 1 м. При этом обеспечивается жесткая связь между этими оптическими приемными устройствами и поворотными устройствами. Каждый из оптических приемных устройств 1 (2) состоит из объектива: 4 (5), диска с интерференционными фильтрами 6 (7), поворотного устройства диска 8, 9; и фотоприемника 10 (11), выполненного в виде однорядовой матрицы из фоточувствительных элементов. Инфракрасная энергия, получаемая объектами, например, 30, проходит через объективы 4 (5) и интерференционные фильтры 6 (7), с помощью которых осуществляется выделение из общего фона спектров спектров сигнала, характерных, например, для судов 30. Каждый интерференционный фильтр занимает определенный сектор в диске и имеет определенный участок спектра пропускания. Установка интерференционных фильтров осуществляется с помощью поворотных устройств 8 (9), которые осуществляют поворот дисков. При этом выбирается тот фильтр в диске, при котором уровень фона будет наименьшим.
Далее световая энергия попадает на фоточувствительные площадки (ФЧП) фотоприемников 10 (11), установленные в фокальной плоскости объективов 4 (5), соответственно. Каждый из фотоприемников (10 (11) имеет N одинаковые по площади и чувствительности ФЧП, расположенные в один ряд. При этом в плоскости объекта длинная ось ряда Y (см. фиг. 2) ФЧП расположена перпендикулярно направлению вращения оптических приемных устройств 1, (2) (см. фиг. 1) с помощью поворотного устройства 3. Геометрические размеры ФЧП фотоприемников 10 (11) и фокусное расстояние объективов 4 (5) определяют величину мгновенного поля зрения β (элементарное поле зрения), определяющего угловое размещение системы предупреждения столкновения (см. фиг. 2). Число N ФЧП определяет поле обзора по углу места β·N, а угол вращения поворотного устройства 3 (см. фиг. 1) - поле обзора по азимуту. Благодаря тому что ФЧП расположены вертикально, параллельно друг другу и имеют идентичные геометрические размеры и чувствительность, обеспечивается определение дальности для всех значений угломестных координат визирования объекта 30. В каждой из N ФЧП фотоприемников 10 (11) происходит независимое преобразование световой энергии в электрическую. Фотоприемники имеют инерционность 10-6 с, что необходимо для обеспечения высоких точностных характеристик системы. На N выходах фотоприемников 10 (11), образуются видеосигналы, которые соответственно поступают на N входы коммутаторов 12 (13), которые через синхронизатор 14 управляются датчиком пеленга 15, связанного с поворотным устройством 3. С помощью коммутаторов 12 (13) дискретизируют по времени видеосигнал с фотоприемников 10, (11). Дискретизированные видеосигналы с выхода первого коммутатора 12 непосредственно и через управляемую линию задержки 17 с выхода второго коммутатора 13 поступают на сумматор 16, где суммируются, а затем подаются на вход индикатора 18, на экране которого отображается объект. Оператор с помощью кнюпельного механизма 22 через генератор меток строба 21 накладывает на выбранный участок изображения объекта 30 на экране индикатора 18 в пределах строба 18′. Сигналы о пространственном положении строба 18′ (номер канала - пеленг) поступают на вход пространственных селекторов 19 (20), с помощью которых выделяют видеосигналы от объекта 30, получаемые поверхностью, заключенной в стробе 18′, далее видеосигнал поступает на входы селекторов по амплитуде и длительности 12 (13). В блоках селекции по амплитуде и длительности выделяют видеосигналы от наиболее нагретой части поверхности в стробе 18′ и имеющие длительность, характерную для "точечного" излучателя. Информация о временном положении середин выделенных видеосигналов от одних и тех же "точечных" излучателей объекта 30 с выходов блоков селекции по длительности и амплитуде 12 (13), управляемые сигналами датчика пеленга 15, поступает параллельно на входы блоков определения дальности 25 и корректора дальности 26. Для пояснения принципа определения дальности в блоке 25 воспользуемся фигурой 3; где показаны элементарные поля зрения оптических приемных устройств 1 (2), равные в азимутальном направлении β и в угломестном - β·N соответственно. Поля зрения оптических приемных устройств 1 (2) в азимутальном направлении разнесены друг от друга на Δl, равное, например, 1 м, и имеют одинаковое число фоточувствительных площадок, равное N, одинаковые площади рабочих зон и идентичное их расположение (см. фиг. 2). При вращении оптических приемных устройств 1 (2) с помощью поворотного устройства 3 в направлении, показанном стрелкой А, световая энергия от излучателя, находящегося в стробе 18′ (фиг. 1), сначала проходит через правую диаграмму направленности 31, поле зрения которой равно β2N, а затем - через левую 32, имеющую тот же размер поля зрения. При этом световая энергия "точечного" излучателя, находящегося в стробе воспринимается единичным полем зрения, равным β2, например, 1÷2 элементами каждой диаграммы направленности 31 и 32. В результате на выходах фотоприемников 10 и 11. (см. фиг. 1) между серединами двух видеосигналов 34 и 35 (см. фиг. 2) от одного и того же получателя в стробе 33 будет иметь временное рассогласование Δt, прямо пропорциональное базовому расстоянию между объективами и фотоприемниками и обратно пропорциональное их скорости вращения. Это временное рассогласование является функцией дальности до излучателя и определяется первоначально приблизительно после выделения видеосигналов в пространственных селекторах 19, (20) и селекторах по амплитуде и длительности 23 (24) (см. фиг. 1) в блоке определения дальности.
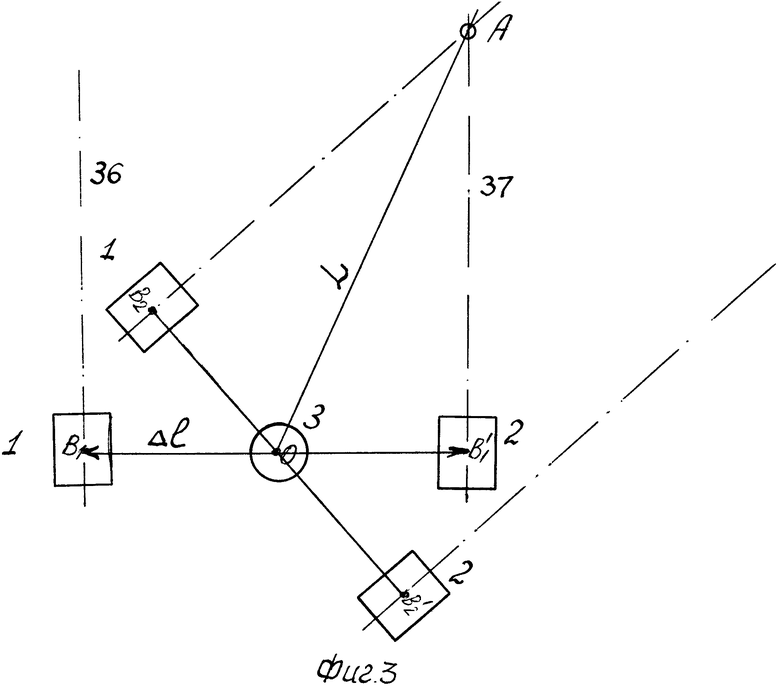
Для обоснования аналитической зависимости дальности как функции времени рассогласования с известными базой Δl и угловой скоростью ω обратимся к фиг. 3.
На фиг. 3 отрезком В1В1′ обозначено расстояние между оптическими осями 36 и 37 оптических приемных устройств 1 и 2 соответственно (см. фиг. 1), лежащий в плоскости поворотного устройства 3. Направление вращения поворотного устройства показано стрелкой (см. фиг. 3). Линиями 36 и 37 показаны оптические оси диаграмм направленности 31 и 32 (см. фиг. 2) оптических приемных устройств 1 и 2 соответственно. Поворотное устройство 3 (см. фиг. 1) вращается вокруг точки 0 (см. фиг. 3), лежащей по середине отрезка В1В1′, соединяющего фокусы объективов 4 и 5 (см. фиг. 1). Пусть источник измерения объекта 30, находящийся внутри строба 33 (фиг. 2), находится в точке А (см. фиг. 3), тогда расстояние до источника определяется длиной отрезка прямой ОА.
Поворотное устройство 3 (см. фиг. 1) вращается с угловой скоростью ω. В момент пересечения точки А оптической осью 37 (оптического приемного устройства 2 (фиг. 3) положение B1B1′, на первый вход блока определения дальности 25 (см. фиг. 1) поступает видеосигнал 34 (см. фиг. 2), а в положении В2В2′ через время Δt на второй вход блока определения дальности 25 (см. фиг. 1) поступает видеоимпульс 35 (см. фиг. 2), снимаемый с оптического приемного устройства 1 при визировании цели А. Дальность до цели L определяется из ∠AOB, соотношением
L=Δl/sinα·2,
где α - угол поворота вращающего устройства;
Δl - расстояние между оптическими осями оптико-приемных устройств 1 и 2 (см. фиг. 3).
Определяя Δt(t) в блоке определения дальности 23 и угловую скорость ω поворотного устройства 3 (см. фиг. 1), дальность L равна
L=Δl/2·sinω·τ/2
Погрешность определения дальности из-за отличия скорости вращения оптических приемных устройств от номинальной определяется в корректоре дальности 26, для чего в корректор дальности 26 от датчика пеленга 15, жестко связанного с поворотным устройством 3 поступают на схему определения временного интервала пеленгационные метки в виде коротких импульсов, следующих друг за другом с определенным интервалом, например 500 мкс. Этот интервал между импульсами зависит от скорости вращения оптических приемных устройств в данный момент времени. При отличии скорости вращения от номинальной интервалы между импульсами с датчика пеленга 15 будут увеличиваться (скорость уменьшается) или уменьшаться (скорость увеличивается). В схеме измерения отношения фактического интервала между двумя импульсами с датчика пеленга в данный момент времени к номинальному интервалу, который имел бы место при номинальной скорости вращения, вырабатывают сигнал корректирующего коэффициента. Вторым источником погрешности измерения дальности, подлежащей учету в корректоре дальности 26 (см. фиг. 1), является разъюстировка оптических осей оптических приемных устройств 1 и 2 в процессе вращения. Для учета этой ошибки каждый раз перед началом работы объективы 4 и 5 и фоточувствительные площадки фотоприемников 10 и 11 устанавливаются в такое угломестное положение, при котором излучение от контрольного излучателя 38, расстояние до которого известно, на каждой паре равноудаленных от центра ФЧП первого и второго фотоприемников соответствовало номинальному угловому положению и временные интервалы между срединами импульсов были одинаковыми. Угломестное направление на излучатель определяется номером пары одноуровневых фоточувствительных площадок фотоприемников. Учет рассогласования оптических осей осуществляется за каждый оборот поворотного устройства 3 в момент визирования световой энергии от контрольного излучателя 38, находящегося на известном расстоянии. При вращении оптических приемных устройств с точно известной угловой скоростью измеряется отношение временного интервала между импульсами сигнала с фотоприемников 10 и 11 с номинальным временным интервалом, в результате чего вырабатывается второй корректирующий сигнал. Оба корректирующие сигналы из блока коррекции дальности 26, вводят в блок определения дальность 25, в котором определяется истинное значение дальности до излучателя 30, а также в качестве управляющего импульса - на вход линии задержки 17. Дважды откорректированная дальность с первого выхода блока определения дальности 25 поступает на вход блока автосопровождения 27. На второй вход блока автосопровождения 27 поступают пеленгационные метки с датчика пеленга 15. Каждая метка несет информацию об определенном пеленгационном направлении, третий и четвертый входы блока автосопровождения 27 соединены с ЛАГом 29 и гирокомпасом 28 соответственно. Сигнал дальности со второго выхода блока определения дальности 25 поступает также на вход индикатора 18 для отображения в цифре значения дальности 18′′.
С помощью предлагаемой системы увеличивается безопасность движения судов. Предлагаемую систему предупреждения столкновений наиболее эффективно можно использовать на судах в период нахождения их в сложных навигационных условиях, а также при наличии помех радиолокатору. Ночью и при плохой видимости, что характерно для арктических акваторий, эффективность использования предлагаемой системы особенно велика, особенно при невозможности использовать радиолокатор, например, из-за соблюдения скрытности, так как при этом вероятность современного визуального обнаружения целей судоводителем в ближней зоне уменьшается. Для обеспечения определения дальности до встречной цели в широком интервале расстояний (включая и минимальные), оптические приемные устройства целесообразно устанавливать на баке или полубаке в местах с минимальным затенением. Предлагаемую систему можно устанавливать также и на берегу. При использовании предлагаемой системы уменьшается время движения судов в сложных навигационных условиях, что также обеспечивает большой экономический эффект.
Предлагаемая система предупреждения столкновения может быть реализована, например, на уже имеющейся специальной элементной базе, используемой в других системах, например, тепловизионной инфракрасно-лазерной станции наблюдения за ближней надводной и береговой обстановкой К4-1 НВТМО 474032021. Оптические приемные устройства могут быть выполнены с применением инфракрасного объектива В748, имеющего следующие характеристики: рабочий спектральный диапазон 8-14 мкм; диаметр входного зрачка - 116 мм, фокусное расстояние 150 мм; диаметр кружка наименьшего рассеяния - 0,06 мм; угловое поле зрения 6 угл. град; и фотоприемника ФР0111, состоящего из 100 фоточувствительных площадок, размером 0,1×0,1 мм2 и имеющего высокую чувствительность в диапазоне спектра 8-14 мкм; поворотное устройство 3 может быть выполнено на базе изделия ДСК-1 прибора АН-12, в котором также имеется датчик пеленга, обеспечивающий высокую точность измерения угловой скорости.
Синхронизатор, индикатор и коммутаторы также возможно заимствовать из изделий К4-1, выполненных на основе интегральных микросхем К1104 КН1, К751 КН1-2.
Блоки определения и коррекции дальности, пространственный селектор и селектор по длительности и амплитуде могут быть выполнены с применением микропроцессорного набора серий 1810, управляемых линий задержки на основе, например, микросхемы Б528БРЗ-2.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| ОБЗОРНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1840941A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
| Лазерный обнаружитель оптических сигналов | 2023 |
|
RU2816284C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда и комплексированная система для его реализации | 2021 |
|
RU2770951C1 |
Изобретение относится к оптическим устройствам поиска и может быть использовано в навигационных системах и в системах обнаружения объектов. Система включает лаг, гирокомпас, блок автосопровождения, два оптических приемных устройства, поворотное устройство с датчиком пеленга, селектор по длительности, селектор по амплитуде, переменную линию задержки, блок определения дальности, корректор дальности, индикатор. В оптических приемных устройствах фотоприемники выполнены в виде линейки из N дискретных фоточувствительных площадок, примыкающих друг к другу в осевом направлении, перпендикулярном вектору вращения поворотного устройства. N выходов первого и второго фотоприемников соединены соответственно с N входами введенных первого и второго коммутаторов, управляющие входы которых соединены с первым и вторым выходами введенного синхронизатора. Технический результат - повышение информативности отображения на экране, упрощение конструкции оптических приемных устройств. 3 ил.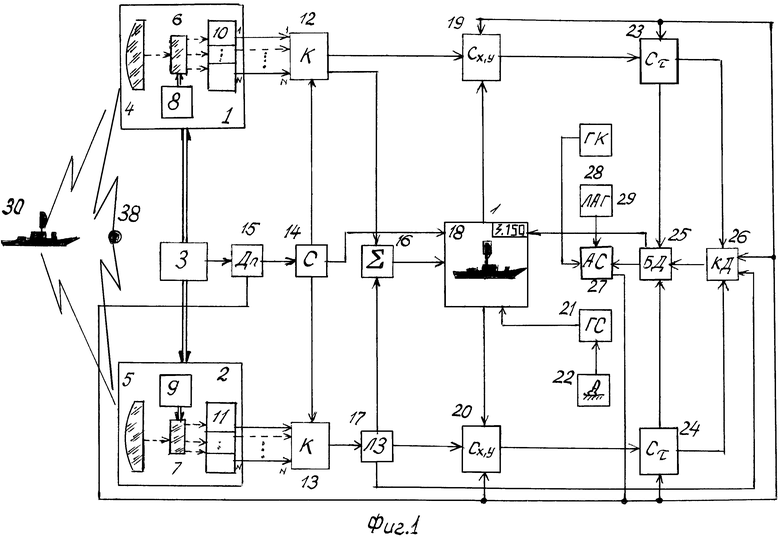
Система предупреждения столкновений, содержащая лаг, гирокомпас, блок автосопровождения, два оптических приемных устройства, поворотное устройство с датчиком пеленга, селектор по длительности, селектор по амплитуде, переменную линию задержки, блок определения дальности и корректор дальности, индикатор, отличающаяся тем, что, с целью повышения безопасности движения судов в оптических приемных устройствах, фотоприемники выполнены в виде линейки из N дискретных фоточувствительных площадок, примыкающих друг к другу в осевом направлении, перпендикулярном вектору вращения поворотного устройства, при этом N выходов первого и второго фотоприемников соединены соответственно с N входами введенных первого и второго коммутаторов, управляющие входы которых соединены с первым и вторым выходами введенного синхронизатора соответственно, а третий выход синхронизатора соединен с первым входом индикатора, вход синхронизатора соединен с первым выходом датчика пеленга, первый сигнальный выход первого коммутатора соединен с первым входом введенного сумматора, а сигнальный выход второго коммутатора соединен с сигнальным входом управляемой линии задержки, первый сигнальный выход которой соединен со вторым входом сумматора, выход которого соединен со вторым сигнальным входом индикатора, второй сигнальный выход первого коммутатора соединен с первым входом введенного первого пространственного селектора, а второй сигнальный выход управляемой линии задержки - с первым входом введенного второго пространственного селектора, вторые входы первого и второго пространственных селекторов соединены с первым и вторым выходами индикатора соответственно, а четвертый вход индикатора соединен с выходом введенного генератора стробов, вход которого соединен с выходом введенного кнюпельного механизма, третьи входы первого и второго пространственных селекторов подключены ко второму выходу датчика пеленга, выходы первого и второго пространственных селекторов соединены с первыми входами селекторов по амплитуде и длительности соответственно, вторые входы которых соединены с выходом датчика пеленга, первые выходы селекторов по амплитуде и длительности соединены соответственно с первым и вторым входами блока определения дальности, а вторые выходы - соответственно с первым и вторым входами корректора дальности, выход которого соединен с третьим входом блока определения дальности, подключенным первым выходом к первому входу блока автосопровождения, а вторым - с третьим входом индикатора.

