Изобретение относится к области радиолокации, в частности в системам защита от пассивных помех, и может быть использовано ври построении аппаратуры, обеспечивающей селекцию движущихся целей на фоне сигналов, отраженных от широкого класса пассивных помех (дипольные отражатели, местные предметы, гидрометеоры, оптические ненаблюдаемые объекты типа "ангелы" и т.д.) в составе РЛС различного назначения.
Известно устройство защиты двухчастотных РЛС от пассивных помех, содержащее последовательно включенные устройства выделения разностной фазы двух несущих частот и устройство селекции по скорости (См. Hsiao Y.K. "Analysis of dual frequency moving target indication system", The Radio and Elektronic Engeneer, vol. 45, №7, pp. 351-356, July 1975).
Однако недостатком данного устройства является низкая эффективность селекции движущихся целей на фоне пассивных помех вследствие расширения спектра флюктуаций сигналов пассивных помех из-за нелинейной обработки в перемножителе устройства.
Наиболее близким по технической сущности к предлагаемому техническому решению является адаптивное двухчастотное устройство селекции движущихся целей, содержащее выходной сумматор, первый и второй блоки весовой обработки, выход каждого из которых соединен с соответствующим входом выходного сумматора, первый и второй блоки выделения и оценки доплеровской разности фазы, первый и второй N-отводные элементы задержки, входы которых являются первый и вторым входами устройства соответственно, каждый выход каждого N-отводного элемента задержки соединен с соответствующим входом соответствующего блока весовой обработки и соответствующим входом соответствующего блока выделения и оценки доплеровский разности фазы. (См. "Вопросы специальной радиоэлектроники", серия РЛТ, вып. 11, 1982 г., стр. 32, рис. 6а).
Однако недостатком данного устройства является низкая эффективность его работы в условиях воздействия мало протяженных и дискретных пассивных помех, когда точность оценки доплеровской разности фазы, получающаяся в блоках выделения разности фазы, не может быть повышена за счет усреднения значений фазы по соседним элементам дистанции, так как они не заняты сигналами пассивных помех.
Целью настоящего изобретения является повышение помехозащищенности по отношению к мало протяженным по дальности и дискретным пассивным помехам.
Доставленная цель достигается тем, что в адаптивное двухчастотное устройство селекции движущихся целей, содержащее выходной сумматор, первый и второй блоки весовой обработки, выход каждого из которых соединен с соответствующим входом выходного сумматора, первый и второй блоки выделения и оценки доплеровской разности фазы, первый и второй N-отводные элементы задержки, входы которых являются первым и вторым входами устройства соответственно, каждый выход каждого N-отводного элемента задержки соединен с соответствующим входом соответствующего блока весовой обработки и соответствующим входом соответствующего блока выделения и оценки доплеровской разности фазы, введены блок сравнения с порогом модуля доплеровских разностей фазы, входы которого соединены с выходами первого и второго блоков выделения и оценки доплеровской разности фазы, между выходами первого и второго блоков выделения и оценки доплеровской разности фазы включен масштабный сумматор, между выходом первого блока выделения и оценки доплеровской разности фазы и дополнительным входом второго блока весовой обработки включен первый коммутатор, между выходом второго блока выделения и оценки доплеровской разности фазы и дополнительным входом первого блока весовой обработки включен второй коммутатор, другие входы коммутаторов соединены с выходом масштабного сумматора, а управляющие входы - с выходом блока сравнения с порогом модуля доплеровских разностей фазы.
На фиг. 1 представлена структурная схема предложенного устройства.
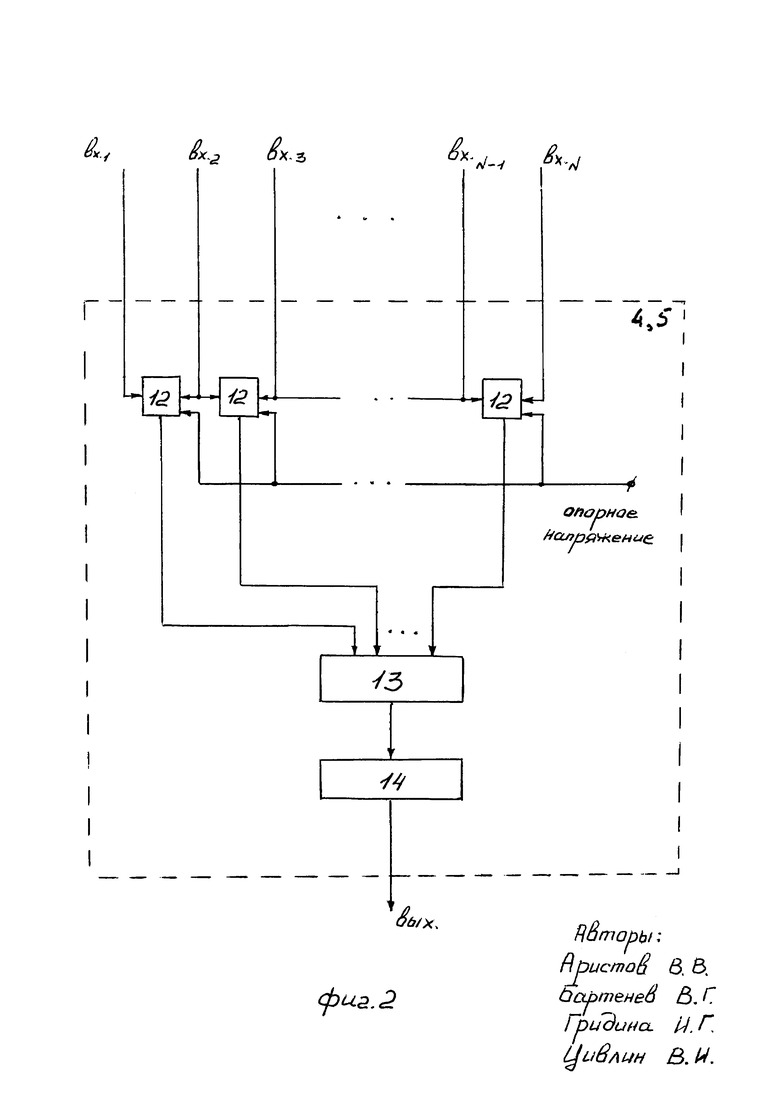
На фиг. 2 представлен пример выполнения блока выделения и оценки доплеровской разности фазы.
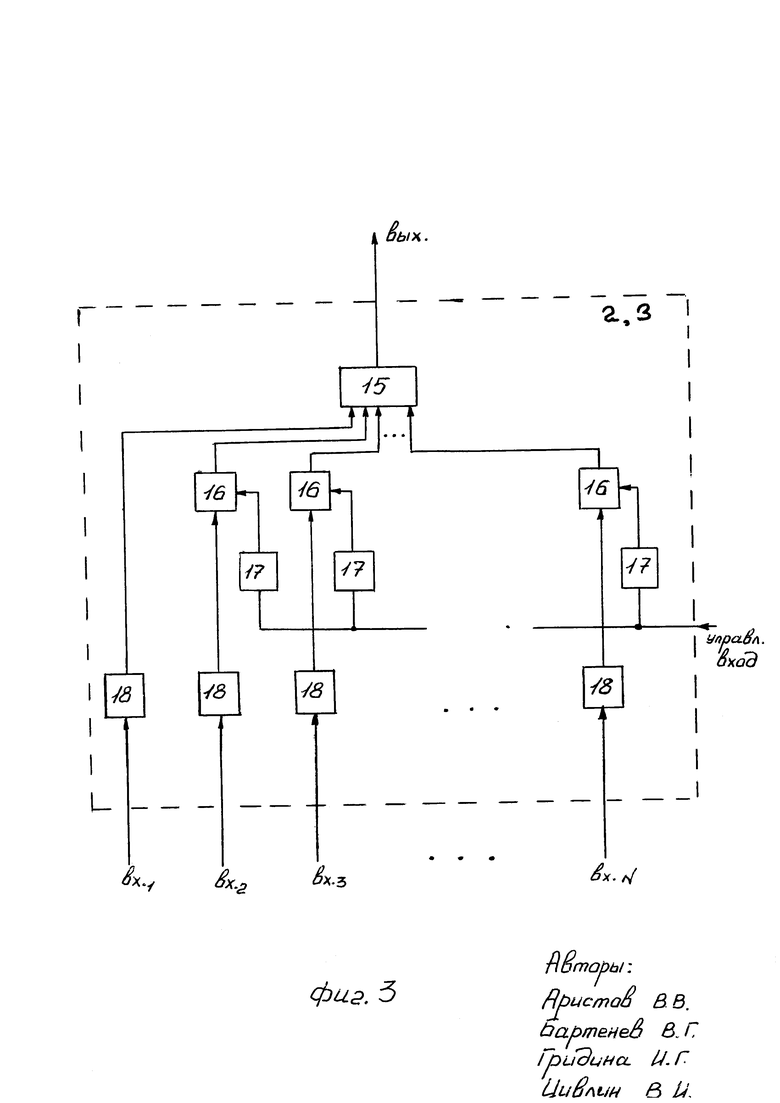
На фиг. 3 представлен пример выполнения блока весовой обработки.
На чертежах и в тексте приняты следующие обозначения:
1 - выходной сумматор,
2 - первый блок весовой обработки,
3 - второй блок весовой обработки,
4 - первый блок выделения и оценки доплеровской разности фазы,
5 - второй блок выделения и оценки доплеровской разности фазы,
6 - первый N-отводный элемент задержки,
7 - второй N-отводный элемент задержки,
8 - блок сравнения с порогом модуля доплеровских разностей фазы,
9 - масштабный сумматор,
10 - первый коммутатор,
11 - второй коммутатору
12 - блоки вычисления доплеровской разности фазы,
13 - первый сумматор,
14 - делитель на ПЗУ,
15 - второй сумматор,
16 - управляемые фазовращатели,
17 - первые весовые элементы,
18 - вторые весовые элементы.
Предлагаемое устройство содержит выходной сумматор 1, первый 2 и второй 3 блоки весовой обработки, выход каждого из которых соединен с соответствующим входом выходного сумматора, первый 4 и второй 5 блоки выделения и оценки доплеровской разности фазы, первый 6 и второй 7 N-отводные элементы задержки, входы которых являются первым и вторым входами устройства соответственно, каждый выход каждого N-отводного элемента задержки соединен с соответствующим входом соответствующего блока весовой обработки и соответствующим входом соответствующего блока выделения и оценки доплеровской разности фазы, блок сравнения с порогом модуля доплеровских разностей фазы 8, входы которого соединены с выходами первого 4 и второго 5 блоков выделения и оценки доплеровской разности фазы, между выходами первого и второго блоков выделения и оценки доплеровской разности фазы включен масштабный сумматор 9, между выходом первого блока выделения и оценки доплеровской разности фазы 4 и дополнительным входом второго блока весовой обработки 3 включен первый коммутатор 10, между выходом второго блока выделения и оценки доплеровской разности фазы 5 и дополнительным входом первого блока весовой обработки 2 включен второй коммутатор 11, другие входы коммутаторов соединены с выходом масштабного сумматора 9, а управляющие входы - с выходом блока сравнения с порогом модуля доплеровских разностей фаз 8.
Предложенное устройство работает следующим образом.
Вначале обрабатываемые сигналы в каждом частотном канале на одинаковой промежуточной частоте поступают на соответствующий вход N-отводных элементов задержки 6 и 7, выполняющих функцию регистра памяти. В каждом частотном канале производится оценка  и
и  , межпериодной разности фаз в первом 4 и втором 5 блоках выделения и оценки доплеровской разности фазы, а затем осуществляется перекрестный ввод оценок. Выделение сигнала на фоне помех осуществляется в блоке весовой обработки 2 и 3 каждого канала с учетом оценки межпериодной разности фазы помехи, полученной в другом частотном канале. Оценка межпериодной разности фазы, полученная для одной частоты, используется для компенсации доплеровской фазы сигнала на др. частоте и наоборот. В результате компенсации доплеровского набега фаз происходит смещение доплеровского спектра помехи в область нулевых частот и ее подавление. В то же время благодаря различию между доплеровскими набегами фаз полезного сигнала в двухчастотных каналах и между доплеровскими набегами фаз полезного сигнала и помехи смещения спектра полезного сигнала в область нулевых частот не происходит, что обеспечивает прохождение полезного сигнала на выход устройства.
, межпериодной разности фаз в первом 4 и втором 5 блоках выделения и оценки доплеровской разности фазы, а затем осуществляется перекрестный ввод оценок. Выделение сигнала на фоне помех осуществляется в блоке весовой обработки 2 и 3 каждого канала с учетом оценки межпериодной разности фазы помехи, полученной в другом частотном канале. Оценка межпериодной разности фазы, полученная для одной частоты, используется для компенсации доплеровской фазы сигнала на др. частоте и наоборот. В результате компенсации доплеровского набега фаз происходит смещение доплеровского спектра помехи в область нулевых частот и ее подавление. В то же время благодаря различию между доплеровскими набегами фаз полезного сигнала в двухчастотных каналах и между доплеровскими набегами фаз полезного сигнала и помехи смещения спектра полезного сигнала в область нулевых частот не происходит, что обеспечивает прохождение полезного сигнала на выход устройства.
Все нелинейные операции осуществляются в блоках выделения и оценки доплеровской разности фазы 4, 5. Степень компенсации определяется выбранным разносом несущих частот в РЛС и зависит от величины радиальной составляющей скорости.
На фиг. 2 представлен возможный вариант построения блока 4 и 5 выделения и оценки доплеровской разности фазы. Пример выполнения блока вычисления доплеровской разности фазы 12 приведен в авторском свидетельстве № 1841283, Мкл3 G01S 13/52, 1982 г. на фиг. 2. Опорное напряжение подается на блоки 12 от когерентного гетеродина РЛС на промежуточной частоте. В блоках 4 и 5 выделения и оценки доплеровской разности фазы осуществляется усреднение результатов измерений по пачке импульсов.
Число обрабатываемых импульсов в пачке выбирается исходя из конкретной реализации блоков весовой обработки 2 и 3 (см. фиг. 3). Например, в качестве таких блоков можно применить многократную схему череспериодного вычитания, как это показано на фиг. 3.
Весовые коэффициенты первых весовых элементов 17 фиксированы и соответственно равны: α1=-1, … αi=-i, … αn=N, где N - количество импульсов пачки. Весовые коэффициенты вторых весовых элементов 18 выбираются из условия минимизации мощности помехи на выходе. В качестве блоков 2, 3 можно применять также многоканальные импульсно-доплеровские системы. При этом в блоках весовой обработки 2, 3 осуществляется реакция пассивной помехи тем эффективнее, чем оптимальнее выбраны весовые коэффициенты, то есть чем точнее совпадает максимум спектра флюктуации пассивной помехи с зоной режекции. При отражении эхо-сигналов от мало протяженных по дальности и дискретных пассивных помех, блоки выделения и оценки доплеровской разности фазы 4 и 5 не обеспечивают высокой точности оценки фазы за счет невозможности усреднения оценки доплеровской разности фазы по соседним элементам дальности. Это снижает эффективность компенсации радиальной составляющей скорости медленно движущейся мало протяженной по дальности и дискретной пассивной помехи и, как следствие этого, снижается эффективность режекции пассивной помехи в блоках весовой обработки 2 и 3, что подтверждается результатами моделирования. Поэтому в данном случае сигналы, поступающие с блоков 4, 5 выделения и оценки доплеровской разности фазы, поступают на блок сравнения с порогом модуля доплеровских разностей фазы 8, содержащем в своем составе блок взятия модуля и пороговый элемент. Величина порога выбирается исходя из максимально возможной радиальной скорости медленно движущейся пассивной помехи. Сигнал с выхода блока сравнения с порогом 8 является управляющим для двух коммутаторов 10 и 11 (вход 3 на фиг. 1).
Случай, когда модуль доплеровских разностей фаз превышает порог,  порога соответствует быстродвижущейся цели, либо белому шуму.
порога соответствует быстродвижущейся цели, либо белому шуму.
При этом на управляющий вход коммутатора (вх. 3) поступает соответствующий сигнал, открывающий вход 1 и бланкирующий вход 2. В данном случае предложенное устройство работает обычным образом, как прототип.
Случай, когда модуль доплеровских разностей фаз не превышает порога,  порога соответствует наличию либо медленно движущейся пассивной помехе, либо цели в пассивных помехах.
порога соответствует наличию либо медленно движущейся пассивной помехе, либо цели в пассивных помехах.
При этом оценки доплеровских разностей фаз поступают на масштабный сумматор 9, где они суммируются и делятся пополам  . Затем суммарный сигнал поступает на входы 2 коммутаторов. Это позволяет повысить точность оценки благодаря усреднению оценок и присутствию в суммарной оценке компоненты своего частотного канала.
. Затем суммарный сигнал поступает на входы 2 коммутаторов. Это позволяет повысить точность оценки благодаря усреднению оценок и присутствию в суммарной оценке компоненты своего частотного канала.
Анализ эффективности предлагаемого устройства производился на основе использования аналитического выражения для нормированного коэффициента подавления коррелированной помехи на выходе адаптивной системы при усреднении оценки доплеровской разности фазы по двум независимым выборкам (см. "Радиотехника и электроника", №2, 1981 г., стр. 359-360). В таблице ниже приведены значения выигрыша в подавлении коррелированной помехи в предложенном устройстве по сравнению с прототипом. Рассматривалось различное число обрабатываемых импульсов и различные значения коэффициентов корреляции.

Как следует из таблицы, выигрыш в подавлении мало протяженных по дальности и дискретных пассивных помех может достигать 10 дБ.
Таким образом, использование предлагаемого устройства позволит повысить помехозащищенность по сравнению с прототипом.
В качестве базового объекта, в котором реализовано двухчастотное устройство СДЦ, можно выбрать систему СДЦ РЛС 5Н88.
Указанное устройство выполнено на основе схемы прототипа.
Сопоставительный анализ с базовым объектом показал, что базовый объект имеет потери в обнаружении целей на фоне мало протяженных по дальности и дискретных пассивных помех, достигающие 10 дБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный преобразователь допплеровских частот эхо-сигналов для двухчастотной локационной станции | 1982 |
|
SU1841290A1 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| Адаптивная двухчастотная разностно-фазовая система селекции движущихся целей | 1982 |
|
SU1841283A1 |
| Двухчастотное устройство селекции движущихся целей | 1980 |
|
SU1841281A1 |
| Двухчастотное устройство селекции движущихся целей | 1981 |
|
SU1841282A2 |
| Устройство селекции движущихся целей для двухчастотного радиолокатора | 1984 |
|
SU1841293A1 |
| Селектор эхо-сигнала движущихся целей для двухчастотного радиолокатора | 1984 |
|
SU1841292A1 |
| Устройство селекции движущихся целей для наземного когерентно-импульсного радиолокатора | 1983 |
|
SU1841286A1 |
| Устройство селекции движущихся целей для радиолокатора с вобуляцией периода повторения | 1984 |
|
SU1841287A1 |
| Цифровое устройство для селекции движущихся целей | 1980 |
|
SU1841289A1 |
Изобретение относится к области радиолокации и может быть использовано при построении аппаратуры, обеспечивающей селекцию движущихся целей на фоне сигналов, отраженных от широкого класса пассивных помех в составе РЛС различного назначения. Достигаемый технический результат - повышение помехозащищенности по отношению к малоразмерным дискретным пассивным помехам. Указанный результат достигается за счет того, что устройство содержит определенным образом соединенные между собой выходной сумматор, два блока весовой обработки, два блока выделения и оценки доплеровской разности фаз, два N-отводных элемента задержки, блок сравнения с порогом модуля доплеровской разности фаз, масштабный сумматор и два коммутатора. 3 ил., 1 табл.
Адаптивное двухчастотное устройство селекции движущихся целей, содержащее выходной сумматор, первый и второй блоки весовой обработки, выход каждого из которых соединен с соответствующим входом выходного сумматора, первый и второй блоки выделения и оценки доплеровской разности фаз, первый и второй N-отводные элементы задержки, входы которых являются первыми и вторым входами устройства соответственно, выход каждого N-отводного элемента задержки соединен с соответствующим N-м входом соответствующего блока весовой обработки и соответствующим N-м входом соответствующего блока выделения и оценки доплеровской разности фаз, отличающееся тем, что, с целью завышения помехозащищенности по отношению к малоразмерным дискретным пассивным помехам, в него введен блок сравнения с порогом модуля доплеровской разности фаз, входы которого соединены с выходами первого и второго блоков выделения и оценки доплеровской разности фаз, масштабный их сумматор, включенный между выходами первого и второго блоков выделения и оценки доплеровской разности фаз, первый коммутатор, включенный между выходом первого блока выделения и оценки доплеровской разности фаз и N+1-й входом второго блока весовой обработки, второй коммутатор, включенный между выходом второго блока выделения и оценки доплеровской разности фаз и N+1-м входом первого блока весовой обработки, вторые входы коммутаторов соединены с выходом масштабного сумматора, а третьи (управляющие) входы - с выходом блока сравнения с порогом модуля доплеровской разности фаз.
| Вопросы специальной радиоэлектроники, серия РЛТ , вып | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| , стр 32. | |||

