Изобретение относится к области радиолокации, в частности к области защиты РЛС от медленно движущихся под действием ветра пассивных помех. Предлагаемое изобретение может быть использовано при построении устройств СДЦ двухчастотных РЛС при обработке широкополосных сигналов.
Известен двухчастотный компенсатор скорости ветра на радиочастоте (Hsiao J.K. Analysis of a dual frequency movinq target indication system. "Radio and Electron: Enq." 1975, v. 45, №7), содержащий устройство выделения межчастотной разности фазы эхо-сигналов, принятых на двух несущих частотах. При этом устройство выделения разностной фазы выполнено в виде перемножителя. Однако недостатком данного компенсатора скорости ветра является низкая точность компенсации, обусловленная нелинейной безынерционной операцией перемножения в устройстве выделения разностной фазы, что приводит к увеличению дисперсии флюктуаций скомпенсированных по скорости пассивных помех.
Из известных двухчастотных компенсаторов скорости ветра наиболее близким по технической сущности к предлагаемому изобретению является двухчастотный компенсатор скорости ветра, содержащий выходной сумматор, первый и второй управляемые фазовращатели, вход каждого из которых является входом соответствующей частоты двухчастотного компенсатора скорости, а выход соединен с соответствующим входом выходного сумматора, первый вычислитель разности фаз (ВРФ), первый вход которого соединен с входом второго управляемого фазовращателя, второй ВРФ, первый вход которого соединен с входом первого управляемого фазовращателя, первый элемент задержки, выход которого соединен с вторым входом первого ВРФ, второй элемент задержки, выход которого соединен с вторым входом второго ВРФ, выход первого ВРФ через рециркулятор-накопитель подключен ко входу управления первого управляемого фазовращателя, а выход второго ВРФ через рециркулятор-накопитель подключен ко входу управления второго управляемого фазовращателя. (см. "Вопросы спец. радиоэлектроники", серия РЛТ, вып. 15, 1981 г., стр. 42, рис. 3).
В данном устройстве нелинейная операция перемножения исключена из канала прохождения эхо-сигналов, а компенсация скорости ветра осуществляется с помощью управляемых фазовращателей. Однако и данное устройство имеет низкую точность компенсации скорости ветра, обусловленную наличием в каналах формирования сигналов управления фазовращателей рециркуляторов-накопителей, которые реализуются на линиях задержки и сумматорах. Нестабильность линий задержек вносит дополнительные погрешности в вычисление сигналов управления фазовращателями, что и снижает точность "поддува" пассивной помехи компенсатором скорости ветра.
Целью настоящего изобретения является повышение точности.
Поставленная цель достигается тем, что в известнее устройство, содержащее первый и второй элементы задержки, первый и второй управляемые фазовращатели, первый и второй вычислители разности фаз и выходной сумматор, введены третий управляемый фазовращатель, вход которого соединен с входом второго управляемого фазовращателя, управляющий вход которого соединен с точкой соединения выхода первого ВРФ с управляющим входом первого управляемого фазовращателя, а выход соединен с входом первого элемента задержки, четвертый управляемый фазовращатель, вход которого соединен с входом первого управляемого фазовращателя, а управляющий вход соединен с течкой соединения выхода второго ВРФ и управляющим входом второго управляемого фазовращателя, а выход соединен с входом второго элемента задержки, вход опорной частоты первого, второго, третьего и четвертого управляемых фазовращателей является входом опорной частоты двухчастотного компенсатора скорости ветра.
Заявителю не известна совокупность признаков, указанная в отличительной части формулы, которая бы использовалась в иной совокупности признаков и давала бы положительный эффект, тождественный достигаемому предлагаемым устройством. Таким образом, по мнению заявителя, предложенное техническое решение соответствует критерию "существенные отличия".
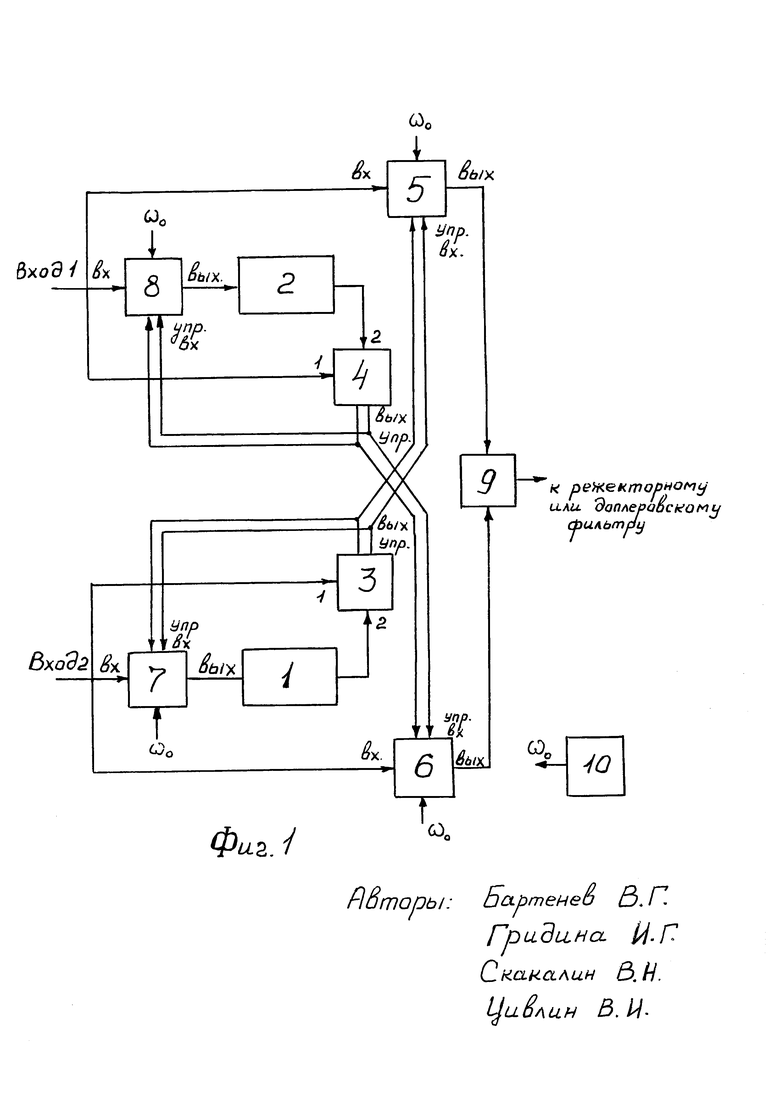
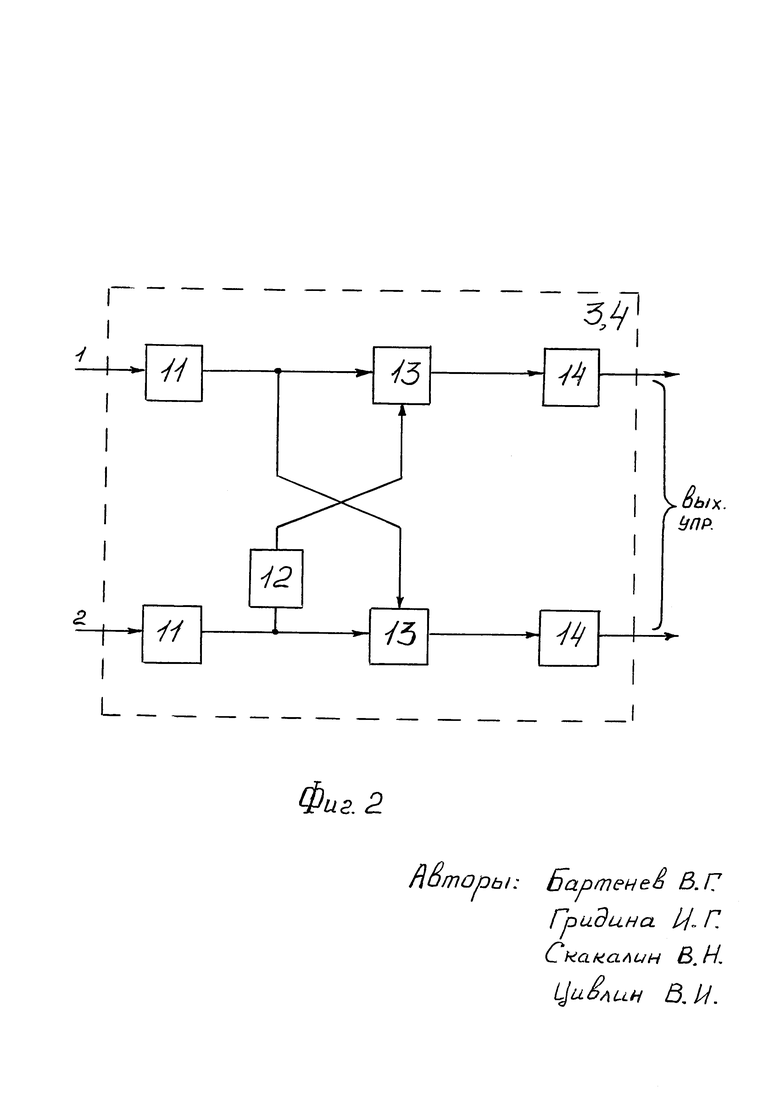
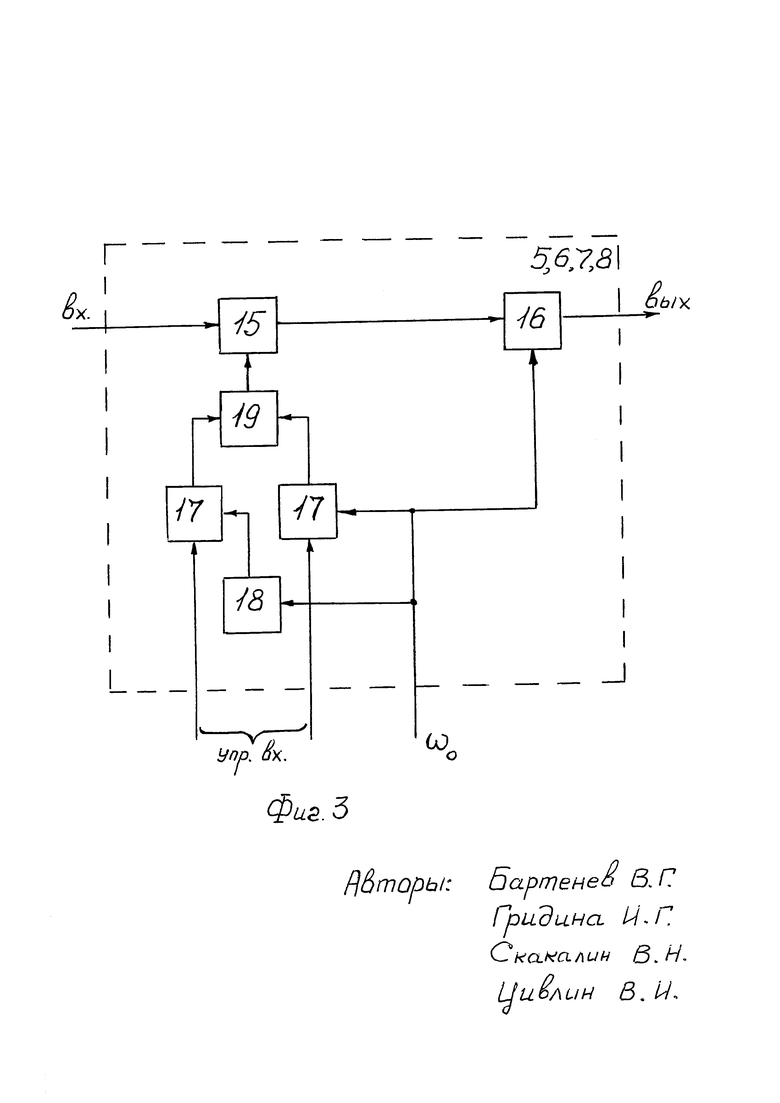
На фиг. 1 представлена структурная схема предложенного устройства, на фиг. 2 изображен вариант реализации ВРФ, а на фиг. 3 изображен вариант реализации управляемого фазовращателя.
На чертежах и в тексте приняты следующие обозначения:
1 - первый элемент задержки
2 - второй элемент задержки
3 - первый вычислитель разности фаз (ВРФ)
4 - второй ВРФ
5 - первый управляемый фазовращатель
6 - второй управляемый фазовращатель
7 - третий управляемый фазовращатель
8 - четвертый управляемый фазовращатель
9 - выходной сумматор
10 - опорный генератор
11 - ограничитель
12 - фазовращатель на π/2
13 - фазовый детектор
14 - фильтр
15 - смеситель первого преобразования частоты
16 - смеситель второго преобразования частоты
17 - балансный модулятор
18 - фазовращатель на π/2
19 – сумматор.
Устройство состоит из первого и второго элементов задержки 1 и 2, первого и второго вычислителей разности фазы 3 и 4, первого, второго, третьего и четвертого управляемых фазовращателей 5, 6, 7 и 8, выходного сумматора 9 и опорного генератора 10. К первому входу устройства подключены входы первого и четвертого управляемых фазовращателей 5 и 8, а также первый вход второго ВРФ4. Выход четвертого управляемого фазовращателя 8 через второй элемент задержки 2 подключен ко второму входу второго ВРФ4, выход которого, подключен к управляющим входам второго и четвертого управляемых фазовращателей 6 и 8. К второму входу устройства подключены входы второго и третьего управляемых фазовращателей 6 и 7, а также первый вход первого ВРФ-3. Выход третьего управляемого фазовращателя 7 через первый элемент задержки подключен ко второму входу первого ВРФ. Выходы первого и второго управляемых фазовращателей 5 и 6 подключены к сумматору 9, выход которого является выходом устройства. К выходу может быть подключен режекторный или многоканальный доплеровский фильтр СДЦ. Генератор 10 опорной частоты подключается ко всем управляемым фазовращателям устройства.
Предлагаемое устройство работает следующим образом. На входы устройства поступают в каждом периоде повторения эхо-сигналы, отраженные от медленно движущейся пассивной помехи и быстро перемещающейся цели. Рассмотрим вначале прохождение сигналов пассивной помехи. Считая для простоты сигнал пассивной помехи, действующий на промежуточной частоте  , нефлюктуирующим по амплитуде, равной
, нефлюктуирующим по амплитуде, равной  с нулевой начальной фазой и доплеровской частотой в каждом частотном канале FA и FB, обусловленной перемещением облака дипольных отражателей, за счет ветра, комплексные огибающие отраженных эхо-сигналов в нескольких периодах повторения можно представить на входах устройства в следующем виде
с нулевой начальной фазой и доплеровской частотой в каждом частотном канале FA и FB, обусловленной перемещением облака дипольных отражателей, за счет ветра, комплексные огибающие отраженных эхо-сигналов в нескольких периодах повторения можно представить на входах устройства в следующем виде

где  ,
,  ,
,  - скорость перемещения пассивной помехи;
- скорость перемещения пассивной помехи;
λА, λB - длины волн, используемые 2-частотной РЛС, Т - период повторения РЛС;
P - число импульсов в принимаемой пачке эхо-сигналов.
Формирование оценок межпериодной доплеровской разности фазы в первом и втором ВРФ 3 и 4 начинается после приема второго импульса пачки. Совмещение во времени эхо-сигналов смежных периодов повторения производится с помощью первого и второго элементов задержки 1 и 2. Первый и второй вычислители разности фаз 3 и 4 измеряют доплеровский набег фазы эхо-сигналов от периода к периоду, на основе использования фазовых детекторов, работающих в квадратуре. В результате чего на выходах ВРФ получаются напряжения, пропорциональные  ,
,  во втором ВРФ4 и
во втором ВРФ4 и ,
,  в первом ВРФ 3.
в первом ВРФ 3.
Указанные напряжения используются для коррекции сигналов по фазе второго периода повторения с помощью третьего и четвертого управляемых фазовращателей 7 и 8.
Откорректированные сигналы подаются на первый и второй элементы задержки 1 и 2.
Таким образом после приема третьего импульса лачки на выходах ВРФ получаются напряжения, пропорциональные  ,
,  во втором ВРФ и
во втором ВРФ и  ,
,  в первом ВРФ, которые используются для коррекции по фазе сигналов третьего периода повторения. Окончательно после P-того импульса пачки на выходах ВРФ получаем
в первом ВРФ, которые используются для коррекции по фазе сигналов третьего периода повторения. Окончательно после P-того импульса пачки на выходах ВРФ получаем
 во втором ВРФ,
во втором ВРФ,
 в первом ВРФ.
в первом ВРФ.
Полученные оценки косинусов и синусов разности фаз используются для компенсации скорости движения пассивной помехи.
Оценки, полученные на выходе ВРФ одного частотного канала, используются для поддува сигналов пассивной помехи, действующей в другом частотном канале и наоборот. То есть на выходе первого управляемого фазовращателя 5 скомпенсированный по доплеру сигнал будет иметь вид

а на выходе второго управляемого фазовращателя 6 скомпенсированный по доплеру сигнал запишется

Таким образом, как и в прототипе, на выходной сумматор 9 подаются откорректированные по фазе сигналы с разностной фазой. Это позволяет, как и в прототипе, исключить "поддув" эхо-сигналов быстродвижущихся целей. Однако в отличие от прототипа, формирование оценок разности фаз в данном случае производится без дополнительных рециркуляторов-накопителей, включенных после первого и второго ВРФ, что и позволяет повысить точность поддува.
Для оценки эффективности предложенного технического решения рассмотрим влияние линий задержки на ошибку измерения разности фаз сигналов.
Поскольку в прототипе имеются кроме основных еще и дополнительные линии задержки в рециркуляторах-накопителях, то при формировании импульсов запуска РЛС от основных линий задержки сигналы на входе и выходе дополнительных линий задержки будут смещены по дальности из-за нестабильности на величину
где ΔТ - нестабильность времени задержки абсолютная,
μ - нестабильность времени задержки относительная,
Т - время задержки,
С - скорость света.
Поскольку фаза сигнала помехи в соседнем элементе дальности имеет произвольное значение, рециркулятор-накопитель приводит к шумовой ошибке измерения разности фаз, относительный уровень которой составляет величину
где δR - импульсный объем.
Примем следующие конкретные значения параметров: Т=2,5 мс; δR=30 м; μ=10-5 (солевая линия задержки при термостатировании). При этих параметрах δ=0,125, откуда дополнительное среднеквадратическое отклонение ошибки измерения разности фаз в прототипе составит
В предлагаемом устройстве эта дополнительная ошибка отсутствует.
Остановимся на вопросах практической реализации предлагаемого устройства. Элементы задержки 1 и 2 представляют собой аналоговые широкополосные линии задержки (солевые), работающие на промежуточной частоте.
Первый и второй вычислители разности фазы (см. фиг. 2) имеют на входе ограничители 11 сигналов на промежуточной частоте, фазовращатель 12 на π/2, фазовые детекторы 13 и выходные фильтры 14 низкой частоты.
Все управляемые фазовращатели реализованы на смесителях 15 и 16, работающих по схеме двойного преобразования частоты. Перевод низкочастотных сигналов управления с выходов ВРФ, содержащих информацию о межпериодной разности фазы, осуществляется в балансных модуляторах 17, на которые подается сигнал опорной частоты ωо как без фазовращателя, так прошедший фазовращатель 18 на π/2. Фазовращатели на π/2 реализуются на отрезке коаксиального кабеля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная двухчастотная разностно-фазовая система селекции движущихся целей | 1982 |
|
SU1841283A1 |
| Двухчастотное устройство селекции движущихся целей | 1981 |
|
SU1841282A2 |
| Селектор эхо-сигнала движущихся целей для двухчастотного радиолокатора | 1984 |
|
SU1841292A1 |
| Цифровое устройство для селекции движущихся целей | 1980 |
|
SU1841289A1 |
| Двухканальный преобразователь допплеровских частот эхо-сигналов для двухчастотной локационной станции | 1982 |
|
SU1841290A1 |
| Устройство селекции движущихся целей для радиолокатора с вобуляцией периода повторения | 1984 |
|
SU1841287A1 |
| Двухчастотное устройство селекции движущихся целей | 1980 |
|
SU1841281A1 |
| Устройство подавления эхо-сигналов движущихся дипольных отражателей и метеообразований | 1983 |
|
SU1841284A1 |
| Адаптивное двухчастотное устройство селекции движущихся целей | 1983 |
|
SU1841291A1 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
Изобретение относится к области радиолокации и может быть использовано при построении устройств селекции движущихся целей двухчастотных РЛС при обработке широкополосных сигналов. Достигаемый технический результат - повышение эффективности подавления медленно движущихся пассивных помех. Указанный результат достигается за счет того, что устройство селекции содержит определенным образом соединенные между собой выходной сумматор, четыре управляемых фазовращателя, генератор опорных колебаний, два блока задержки на период повторения и два измерителя разности фаз. 3 ил.
Устройство селекции движущихся целей для двухчастотного радиолокатора, содержащее выходной сумматор, первый и второй управляемые фазовращатели, выходы которых соединены с входами выходного сумматора, генератор опорных колебаний, выход которого соединен с опорными входами первого и второго управляемых фазовращателей, последовательно соединенные первый блок задержки на период повторения и первый измеритель разности фаз и последовательно соединенные второй блок задержки на период повторения и второй измеритель разности фаз, причем соединенные вход первого управляемого фазовращателя и второй вход первого измерителя разности фаз и соединенные вход второго управляемого фазовращателя и второй вход второго измерителя разности фаз являются первым и вторым входами устройства селекции движущихся целей, отличающееся тем, что, с целью повышения эффективности подавления медленно движущихся пассивных помех, введены третий и четвертый управляемые фазовращатели, причем третий управляемый фазовращатель включен между первым входом устройства селекции движущихся целей и входом первого блока задержки на период повторения, а четвертый управляемый фазовращатель включен между вторым входом устройства селекции движущихся целей и входом второго блока задержки на период повторения, выход генератора опорных колебаний соединен с опорными входами третьего и четвертого управляемых фазовращателей, первый и второй выходы первого измерителя разности фаз соединены соответственно с первыми и вторыми управляющими входами второго и третьего управляемых фазовращателей, а первый и второй выходы второго измерителя разности фаз соединены соответственно с первыми и вторыми входами первого и четвертого управляемых фазовращателей.
| Вопросы специальной радиоэлектроники, серия РЛТ, вып | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| , с | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

