В известных интегрирующих устройствах в качестве суммирующего элемента используются электромеханические реле с храповыми механизмами, электрические шаговые двигатели и двигатели постоянного и перемепного тока. Для сброса показаний в таких устройствах применяются дополнительные электромеханические устройства, используемые только на время сброса (например, муфты) или специальные генераторы (для ускоренного реверса шаговых двигателей).
Предлагаемое устройство содержит в качестве суммирующего элемеита асинхронный двигатель и отличается от известных тем, что двигатель управляется от двух триггеров.
Благодаря позиционной обратной связи, охватывающей двигатель и один из триггеров, осуществляется импульсный пошаговый режим интегрирования, что позволяет повысить точность интегрирования. Так как выход второго триггера сблокирован со входом первого, то подача сигнала на вход второго триггера реверсирует двигатель и позволяет просто осуществить сброс показаний в режиме иепрерывного вращения.
В устройстве применен нересчетный блок, который осуществляет повторные запзски двигателя в режиме непрерывного интегрирования путем онрокидывания второго триггера и разблокирования первого в момент, когда приращение интеграла за время сброса становится равным заранее выбранному значению. Это позволяет устранить ошибку интегрирования, накапливающуюся за время сброса.
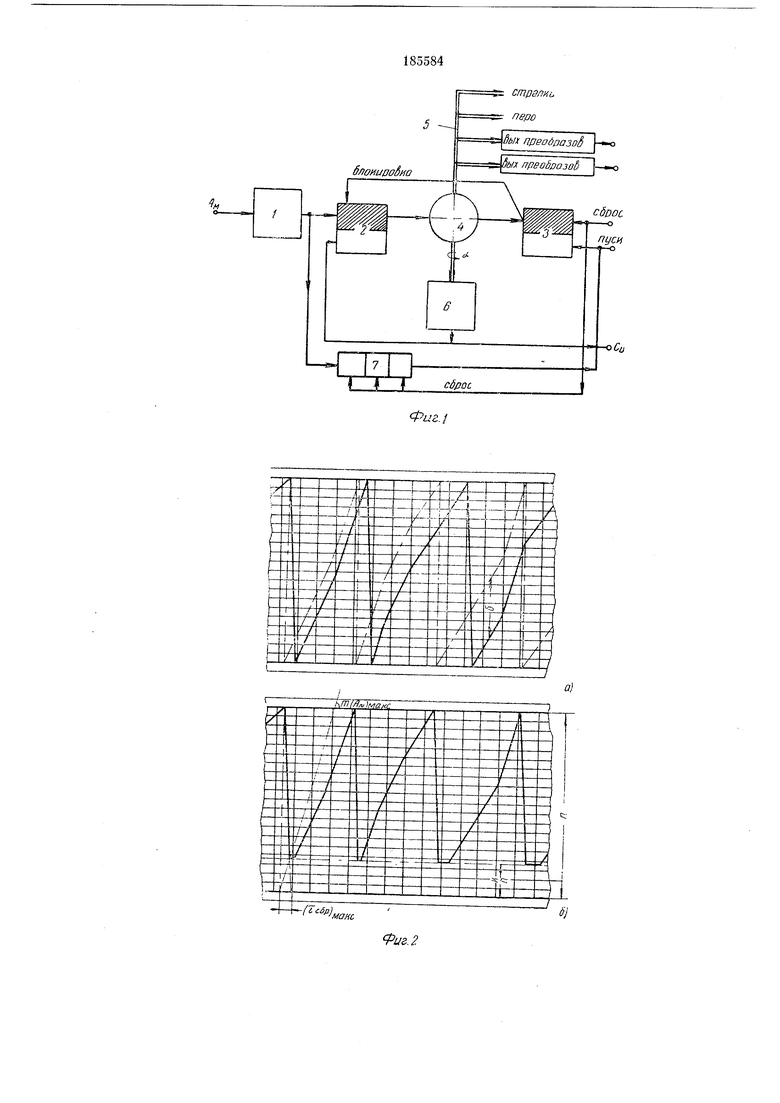
На фиг. I изображена схема интегрирующего устройства; на фиг. 2 - кривые интегрирования входного сигнала.
Устройство содержит преобразователь L блок управления, два триггера 2 к 3, асинхронный двигатель 4, блок регистрации и преобразования выходного сигнала 5, датчик импульсОв обратной связи но положению 6, нересчетный блок 7.
Устройство работает следующим образом. Входной унифицированный сигнал Ам с помощью преобразователя / преобразуется в последовательность импульсов, каждый из которых соответствует фиксированному приращению интеграла. Каждый импульс поступает на один из входов триггера 2, который, в свою очередь, воздействует на реверсивный асинхронный двигатель 4. Двигатель кинематически связан со стрелкой, пером и блоком 5, а
также с датчиком импульсной позиционной обратной связи 6, который выдает электрический импульс каждый раз, когда вал двигателя повернется на некоторый определенный угол. Импульсы с датчика поступают на втоса используется второй триггер 3, включающий двигатель на реверс.
Каждый импульс с выхода преобразователя переводит триггер 2 в такое состояиие, ири котором его выходной триод включает двигатель. Двигатель приводит во вращеиие и перемещает кинематически связанные с ним устройства до тех пор, пока импульс позиционной обратной связи не вернет триггер 2 в исходное состояние, соответствующее торможению двигателя.
Для осуществления сброса (например, при достижении предельной отметки шкалы) подается команда па триггер 3, который переходит при этом в новое устойчивое состояние, так что его выходной триод включает двигатель.
Двигатель реверсируется и возвращает кинематически связанные с ним устройства в начальное положение, фиксируемое нулевым упором. Одновременно с включением двигателя на реверс триггер 3 блокирует выходиой триод триггера 2, запрещая ему воздействовать на двигатель при любом положении этого триггера 2. После реверса двигатель находится на нулевом упоре до тех пор, пока триггер 3 не будет переведен в исходное состояние «пуск.
в непрерывного интегрирования необходимо учитывать приращения интеграла, накопившегося за время сброса. В устройстве режим непрерывного интегрирования осуществляется путем подачи на вход «пуск триггера 3 определенного, заранее выбранного, к-го импульса приращения интеграла, выделяемого пересчетным блоком 7. При этом синхронизация начала пересчета с момента подачи сигнала на сброс осуществляется гашением счетчика по команде «сброс.
Для того чтобы учесть приращение интеграла за время сброса, нулевой упор блока 5 выставляется так, чтобы после окончания сброса стрелка и перо пе доходили до нулевой отметки щкалы (диаграммы) на величину, соответствующую к импульсам приращения интеграла. Коэффициент пересчета К. выбирается таким образом, чтобы пересчетное устройство пе нереполнилось за время сброса при максимальном значении параметра на входе.
Метод непрерывного интегрирования, осуществленный в предлагаемом устройстве, иллюстрируется графиками на фиг. 2. На фиг. 2,а показана интегральная кривая при
0 наличии накапливающейся погрешности б за счет нотери импульсов приращения интеграла при сбросе. Пунктирная линия соответствует фактическому изменению значения интеграла. Фиг. 2,6 дает нредставление о записи на графике предлагаемого прибора, работающего в режиме непрерывного интегрирования, и о выборе величины /С. Время Гсбр. макс соответствует максимальному времени сброса, п - число импульсов приращения интеграла на всю
0 шкалу; угол.тАм.,зк1: определяет максимально возможный наклон интегральной кривой.
Предмет изобретения
5 1. Интегрирующее устройство, содержащее нреобразователь входного сигнала в последовательность импульсов, суммирующий асинхронный двигатель, блок управления и блок регистрации и преобразования выходного сигнала, отличающееся тем, что, с целью повышения точности интегрирования и упрощения сброса показаний, блок управления вынолнен в виде двух триггеров, на выходы которых подключен двигатель, входы одного
из триггеров соединены с преобразователем и датчиком имиульсов позиционной обратной связи, а входы второго триггера связаны с элементами сброса и пуска, нричем выход этого триггера сблокирован со входом первого.
2. Устройство по п. 1, отличающееся тем,
что, с целью устранения ошибки при иенрерывном интегрировании, в нем установлен
пересчетпый -блок, связанный с выходом преобразователя и входами второго триггера.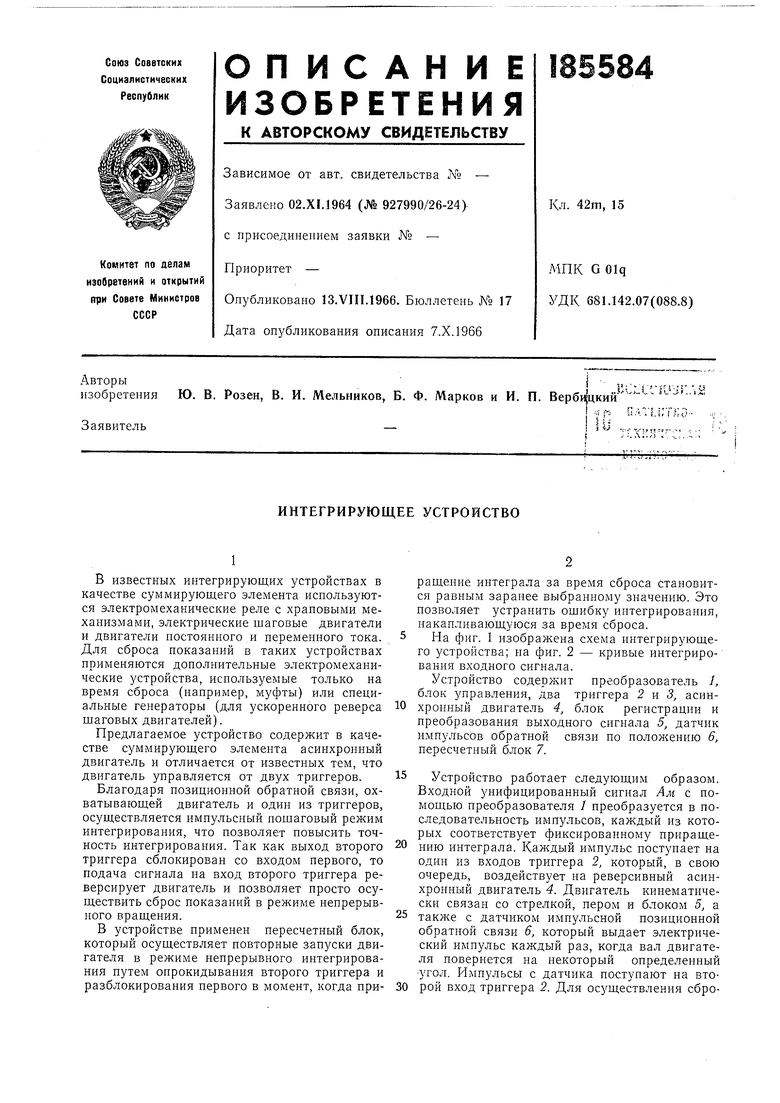
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1972 |
|
SU342209A1 |
| Устройство для интегрирования | 1983 |
|
SU1108470A1 |
| Способ импульсно-фазового управления вентильным преобразователем | 1977 |
|
SU769698A2 |
| ДИСКРЕТНЫЙ ИНТЕГРАТОР НЕПРЕРЫВНЫХ ФУНКЦИЙ | 1972 |
|
SU412602A1 |
| Устройство для измерения веса груза в ковше экскаватора-мехлопаты | 1972 |
|
SU472294A1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 1973 |
|
SU389519A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Устройство для измерения скорости изменения ЭДС статического преобразователя | 1985 |
|
SU1372517A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU370702A1 |
| УСТРОЙСТВО ДЛЯ ДОПУСКОВОГО КОНТРОЛЯ СУММЫ (РАЗНОСТИ) ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1972 |
|
SU421009A1 |