Изобретение относится к области песоиз1мерительной техники.
Известны устройства для определения степени загрузки ковша экскаватора, включающие аналого-дискретный преобразователь, триггеры, счетные, логические и дифференнирующие блоки и пороговые элементы.
Однако известиые устройства и.меют недостаточную точность измерения количества горной массы, перемещаемой в ковше экскаватора, так как не учитывают влияния веся рукояти на результат измерения.
Предлагаемое устройство снабжено блоком коррекции веса рукояти, выполненным в виде реверсивной счетной схемы длины рукояти, узла распознавания направления перемещеиия рукояти, триггеров и элементов задержки «НЕ, «И и связанным входамн с блоком управления и аналого-дискретиым преобразователем, а выходами - с триггером переноса и двумя cxeiMaMK «И, соедппяющими апалого-дискретный преобразователь с реверсивной счетной схемой веса ковша и выходной нересчетной схемой.
Вес груженого н норожнего ковша из.меряется за цикл двукратно с последующи.м вычитанием результатов и вводом поправки па вес выдвигаемой между измерениями части рукояти. Благодаря этому повьпиается точность измерения груза.
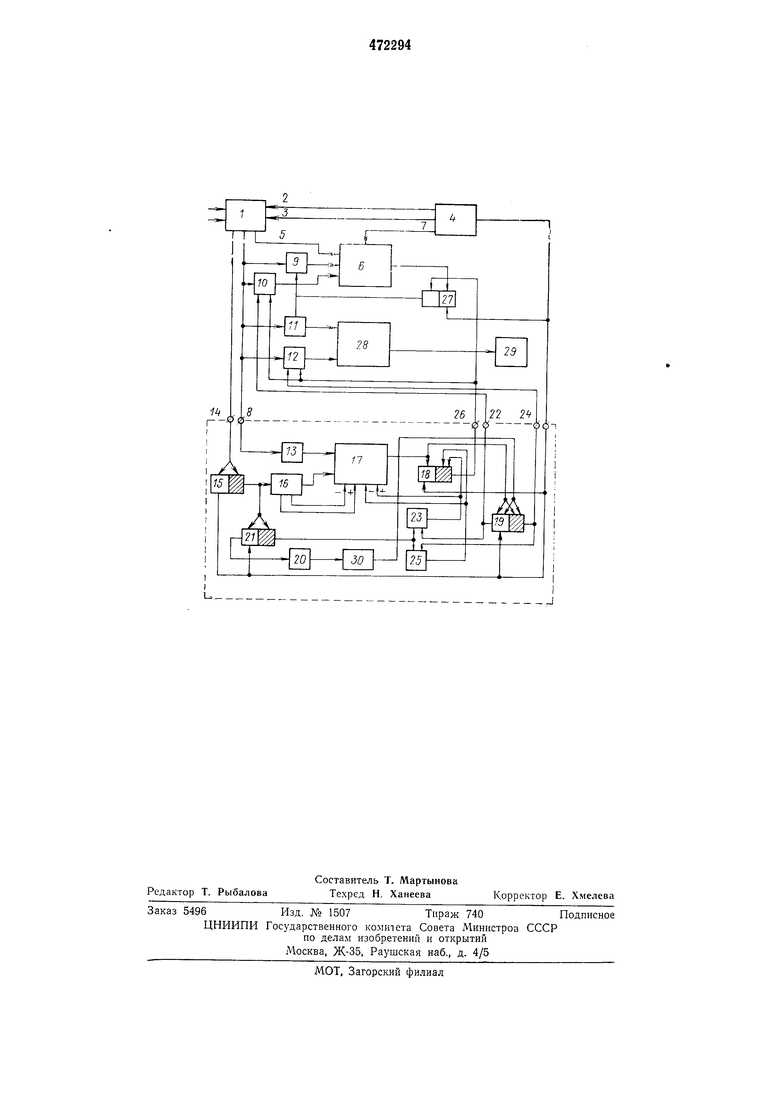
Иа чертеже ноказана функциональная схема устройства.
Аналого-дискретный преобразователь 1 имеет два из.мерптельпых входа, однн из которых пропорционален коэффициенту режима работы двигателя подъема, а другой - току его главной цепи. Стартовые входы 2 н 3 аналого-дискретного преобразователя подключены к выходам блока 4 управления, коптролирующего последовательность операций цикла экскавации.
Измерительны выход 5 аналого-дискретного преобразователя подключен к счетному входу реверсивной счетной схемы веса KOBuia,
которая имеет вход 7 команды «Реверс от блока 4 управления. Выход 8 аналого-дискретпого преобразователя соедпнен с входами элементов «И 9-13, с помощью которых осуществляется перенос и пIyльcoв, а выход
1- - со счетпым входом триггера 15. управляющего узлом распознавания панра лення движення рукояти.
Реверсивиая счетная схема 17 длины рукояти с узлом 16 соединена по счетно.му вхоДУ и по Н1ннам знака, а ее выходы подключены к входу триггера 18 управления переносом импульсов из схемы 17 и к счетному входу триггера 19 управления знаком нереноса импульсов из схемы 17. Счетный вход триггера 19 связан через элемент 20 задержки и
элемент «НЕ с выходом триггера 21 блокировки переноса, счетный вход которого подключен к триггеру 15. Триггер - 19 выходом 22 соединен с входами элементов «И 10 и 23, а выходом 24 - с входами элементов «И 12 и 25. Вторые входы элементов «И 23 и 25 соединены с выходом триггера 21, а их выходы - с входами схемы 17 и вторым входом триггера 18. Триггер 18 своим выходом 26 соединен с входом элеменгов «И 10, 12 и входом триггера 27 нереноса имнульсов из схемы 6 в выходную пересчетную схему 28 с результирующим счетчиком 29. Триггер 27. Выход триггера 27 подключен к входам элементов «И 9 и И. Сигнал 30 с блока управления осуществляет сброс элементов схемы в исходное состояние.
Устройство работает следующим образом.
При повороте экскаватора с груженым ковшом к месту выгрузки от блока 4 управления поступает команда в аналого-дискретный преобразователь 1 для осуществления первого измерения веса ковша. При этом от преобразователя по каналу 5 на счетный вход реверсивной счетной схемы 6 поступает NI импульсов. По окончании процесса первого измерения сигналом с выхода 14 триггер 15 приходит в состояние «1, который включает узел 16 раснознавания направления движения рукоятки. Одновременно на счетный вход реверсивной счетной схемы 17 поступают от узла 16 импульсы.
При разгрузке ковша по сигналу от блока 4 управления реверсируется схема 6, и в ней запоминается число М-Al (Л - емкость схемы 6).
При повороте порожнего ковша к месту черггания по команде от блока управления аналого-дискретный преобразователь осуществляет второе измерение, в результате чего на реверсивную счетную схему веса ковша поступает ;Y2 имнульсов. В схеме 6 запоминается М-N 1 + импульсов.
По окончании второго измерения от преобразователя 1 через выход 14 на триггер 15 поступает сигнал, приводящий триггер в состояние «О. Триггер отключает узел 16, и поступление импульсов в схему 17 прекращается, причем в схеме 17 запоминается +п или -п импульсов. С переходом триггера 15 в состояние «О переводится в состояние «1 триггера 21, который открывает элементы «П 23 и 25 и перебрасывает задержкой времени триггер 19 во время работы схемы 17 ностоянно индицирует знак наконленных в этой схеме импульсов п при поступлении сигнала с триггера 30, опрокидываясь, через один из элементов «П 23 или 25 сигналом через выход 22 или 24 с одного из своих плеч подготавливает схему 17 к переносу импульсов. Одповременно триггер 19 через одни из выходов 22 или 24 подготавливает к работе элемент «П 10 или 12, нри этом на вход триггера 18 поступает сгнал с входа схемы «П 23 или 25, в результате чего триггер 18 переходит в состояние «1 и через выход 26
открывает элементы «П 10, 12 и 13.
Вследствие этого осуществляется параллельный перенос импульсов от аналого-дискретного преобразователя по выходу 8 через элемент «И 13 в схему 17 и через «И 10 или
12 (в зависимости от знака импульсов, накопленных в схеме 17) в схему 6 или выходную схему 28. Если рукоять при втором измерении оказалась короче, чем при первом, то перенос п импульсов осуществляется в схему 6,
в которой запоминается число М-Ai + A2 + 4-an, а если рукоять длиннее, то перенос п импульсов происходит в выходную схему 28. где на an импульсов больше (п - отношение цен одного импульса).
По окончании нереноса схе.ма 17 закрывается сигналом с выходом, приводит триггер 18 в состояние «О, в результате чего сигналом с выхода 26 закрываются элементы «П 10, 12 и 13 и переходит в состояние «1 триггер 27. Триггер сигналом с выхода открывает элементы «И 9 и 11 и осуществляется параллельный перепое импульсов по следующим цепям: аналого-дискретный преобразователь 1 - выход 8 - элемент «И 9 -
счетный вход схемы 6; аиалого-дискретный преобразователь 1 - выход 8 - элемент «П 11 - выходная нересчетная схема 28.
По окончании переноса триггер 27 приходит в состояние «О, а в схему 28 поступает
-Vi-- 2 + п импульсов, пропорциональных весу груза в ковше. При операции черпания следующего цикла экскавации по сигналу сброса от блока управления все устройство приходит в исходное состояние.
Предмет изобретения
Устройство для из.мерения веса груза i ковше экскаватора-мехлопаты, содержащее
аналого-дискретный преобразователь, реверсивную счетную схему веса ковша, вы.ходную пересчетную схему, блок управления, результирующий счетчик, триггер переноса и эле.менты «П, отличающееся тем, что, с целью
повышения точности, оно снабжено блоко.м коррекции веса рукояти, выполненным в виде реверсивной счетной схемы длины рукоятп, узла распознавания направления перемещения рукояти, триггеров и элементов задержки «ПЕ, «И и связанным входами с блоком управления и аналого-дискретным преобразователем, а выходами - с триггеро.м нереноса и двумя схемами «П, соединяющими аналогами - с триггером нереноса
и двумя схемами «П, соединяющими аналого-дискретный преобразователь с реверсивной счетной схемой веса ковша и выходной пересчетпой схемой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения величины загрузки ковша экскаватора | 1973 |
|
SU446599A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ВЕЛИЧИНЫ ЗАГРУЗКИ КОВША ЭКСКАВАТОРА | 1971 |
|
SU309098A1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА ПРОИЗВОДИТЕЛЬНОСТИ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1973 |
|
SU407360A1 |
| Устройство для учета производительности одноковшового экскаватора | 1976 |
|
SU636650A2 |
| УСТРОЙСТВО для КОНТРОЛЯ РАБОТЫ ЭКСКАВАТОРА | 1972 |
|
SU327306A1 |
| Устройство для измерения работы экскаватора-драглайна | 1976 |
|
SU634232A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Устройство для измерения работы экскаватора драглайна | 1976 |
|
SU737575A2 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Способ определения веса ковша экскаватора-драглайна | 1976 |
|
SU662820A1 |