Известные системы автоматического управления буксируемой моделью на крыльях не обладают достаточными динамическими качествами и решают задачу управления частично.
Предлагаемое устройство отличается тем, что обеспечивает устойчивость модели, позволяет замерить ее буксировочное сопротивление на различных скоростях хода и исследовать влияние параметров самой системы управления на динамические качества буксируемых моделей.
Устройство состоит из измерителей параметров движения модели, счетно-решающего прибора и исполнительных следяш,их приводов органов управления модели.
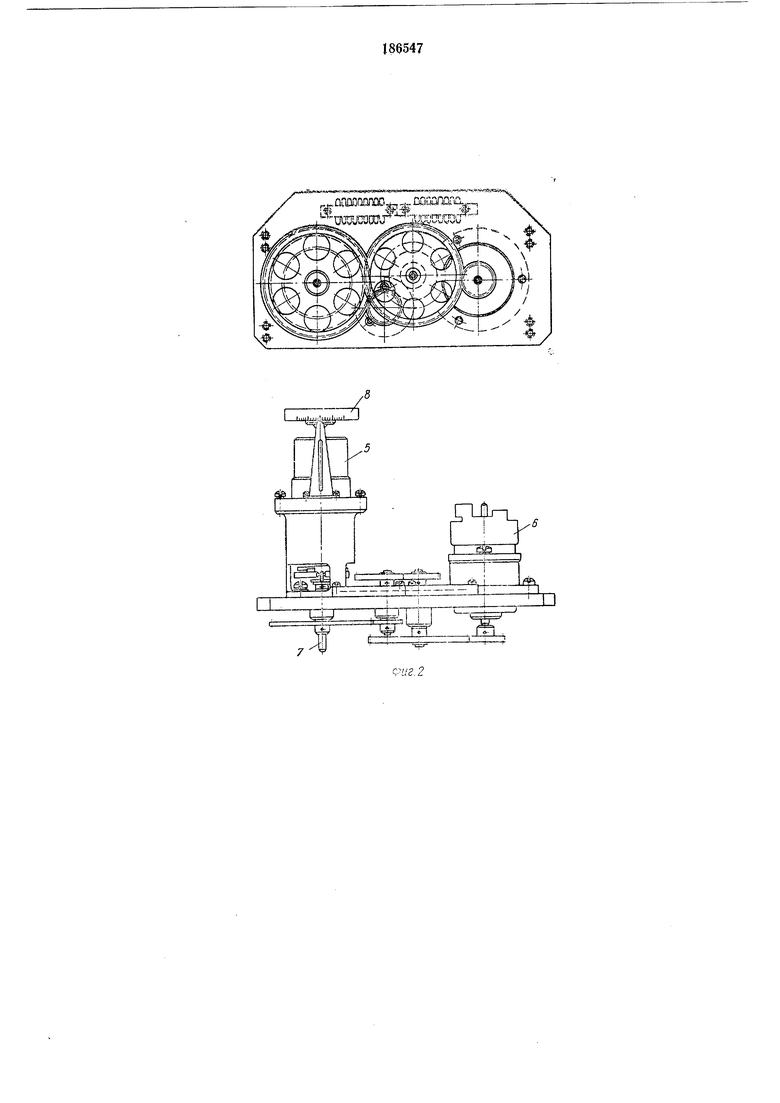
Измерители параметров движения (см. фиг. 1) состоят из блока 1 измерения углов дифферента, крена модели и их производных, блока 2 измерения вертикальных перемещений модели и их производных, блока 3 измерения рыскания и его производной.
Блок 4 измерения угловых перемещений модели включает вращающийся трансформатор 5 (см. фиг. 2) и асинхронный тахогенератор 6, роторы которых кинематически связаны с входным валом 7. На оси трансформатора 5 имеется шкала 8.
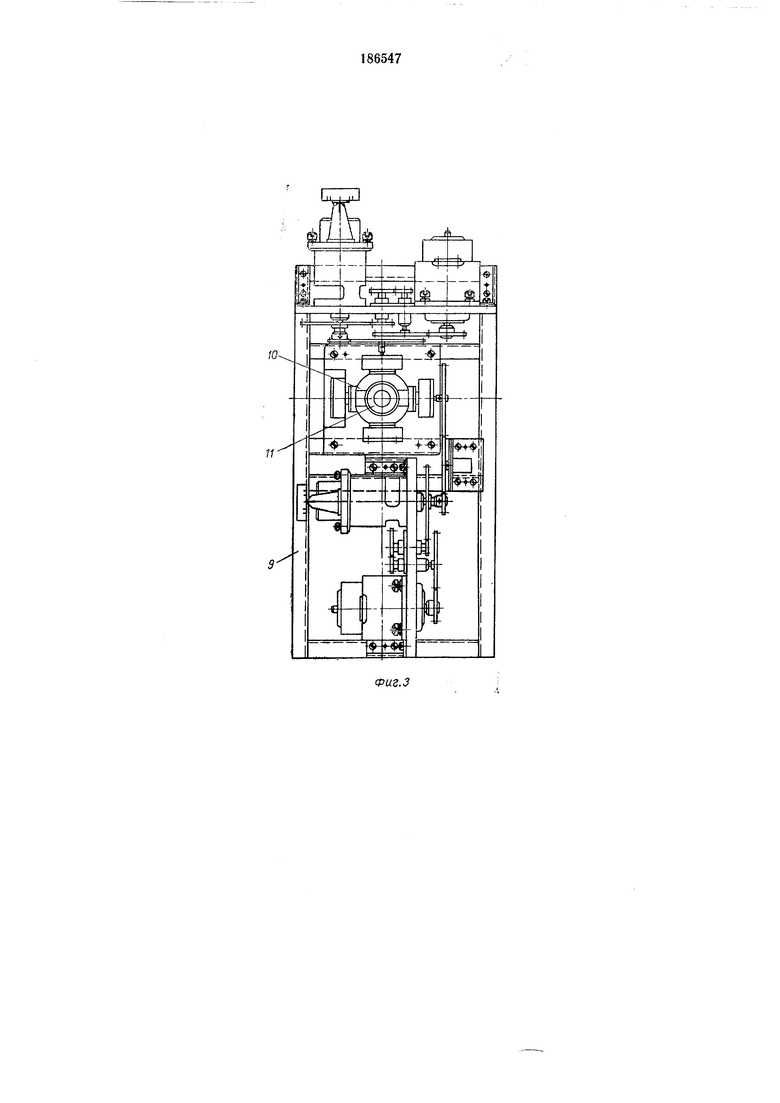
жит раму 9, на которой закреплены кардан 10 и два блока 4, кинематически связанные с двумя горизонтально расположенными осями кардана. Входом блока является кинематичеекая втулка //. Рама блока жестко связана с моделью.
Блок измерения вертикальных перемещений модели и их производных (фиг. 4) содержит вращающийся трансформатор 12 и асинхронный тахогенератор 13, роторы которых кинематически связаны с барабаном 14, со шкалой 15, являющимся входом блока. Постоянный нагяг троса, передающего движение от модели к барабану, создается пружиной 16. Плата блока жестко связана с буксировочным устройством.
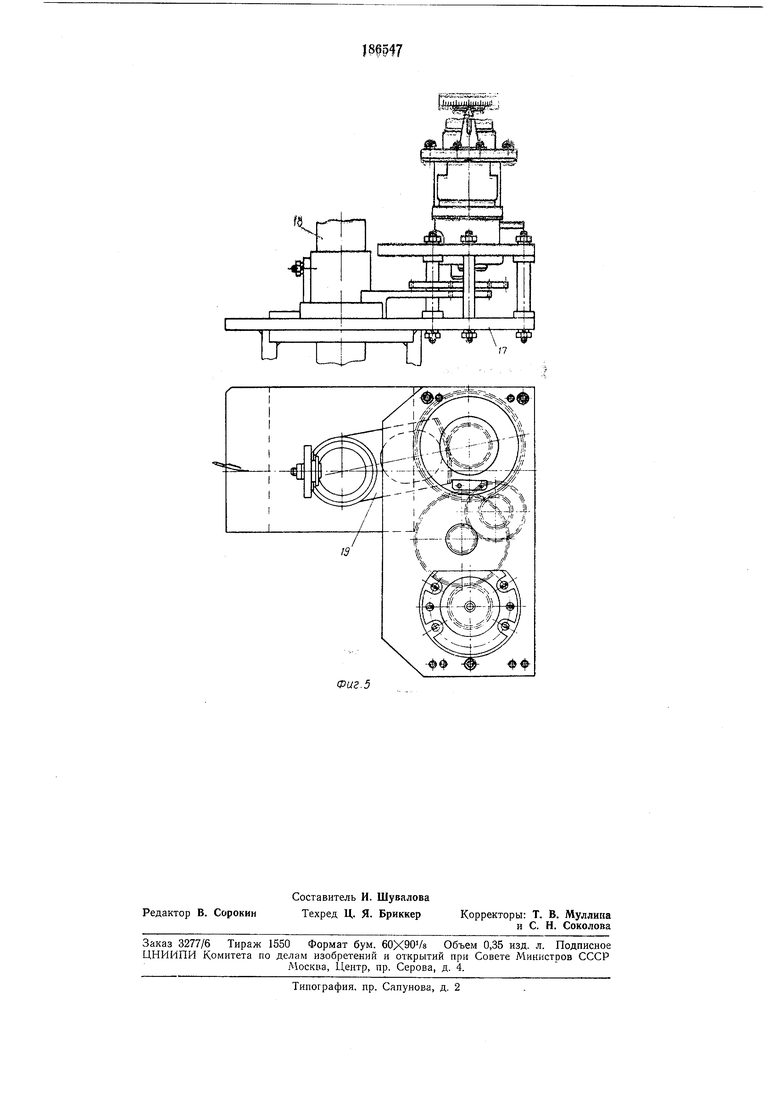
Блок измерения рыскания модели и его производной (см. фиг. 5) содержит кронштейн 17, на котором установлен блок 4, кинематически связанный со штангой 18 через зубчатый сектор 19. Кронщтейн связан с буксировочным устройством шарнирно, и его плоскость всегда сохраняет перпендикулярное положение по отношению к оси измерительной штанги.
пием буксировочного устройства и измерительной штанги, отличающееся тем, что, с целью осуществления программных поворотов модели по углам дифферента, крена и рыскания и возможности измерения текущих значений всех упомянутых углов и величины вертикального перемещения модели, нижний
конец измерительной штанги установлен в шаровой карданов подвес, а верхний конец щтанги помещен в направляющую каретку, являющуюся внутренней рамкой второго карданова подвеса, внещняя рамка которого жестко закреплена на раме буксировочного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАМ№» МОДЕЛИ СУДНА В ОПЫТОВОМ БАССЕЙНЕ | 1971 |
|
SU311805A1 |
| Буксировочное устройство для гидродинамических испытаний моделей судов в открытых водоемах | 1980 |
|
SU933536A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| БУКСИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МОДЕЛЕЙ СУДОВ В ОТКРЫТЫХ ВОДОЕМАХ | 1970 |
|
SU261934A1 |
| Установка для испытаний самоходной модели судна в опытовом бассейне | 1976 |
|
SU553514A1 |
| Установка для буксировочных испытаний модели судна в опытовом бассейне | 1982 |
|
SU1057362A2 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ БУРОВОЙ ПЛАТФОРМЫ В ОПЫТОВОМ БАССЕЙНЕ | 1999 |
|
RU2168438C2 |


|№i I - --ij i
I -. .-- - -
ши
,-i -SB
Pcr :±b3rifcr3
ч:
