Изобретение относится к экспериментальной гидромеханике корабля, в частности к оборудованию для проведения гидродинамических исследований моделей судов в опытовом басгсейне. , По основному авт.св. № 757376 из вестна установка для буксировочных испытаний модели судна в ontJTOBOM бассейне,содержащее перемещающуюся помощью следящего привода по горизо тальным поперечным направляющим вед щую каретку,связанную шарнирной тяг со встроенным упругим элементом .с внутренней кареткой, размещенной в раме,которая через упругие шарниры соединена с внешней ведомой кареткой, установленной с возможностью перемещения по направляющим, проложенным поперек опытового бассейна с помощью другого следящего привода Внутренняя каретка снабжена роликами, в которых находится вертикальный пилон для закрепления исследуем модели. Недостатком известной установки является невысокая точность воспроизведения движения судна, как постоянство.продольной, составляющей скорости движения модели, равной скорости движения буксировочной тележки, накладывает жесткую связь на свободу движения модели вдоль оси опытового бассейна, что может приве ти к ошибкам в оценке рыскливости и остойчивости судна, особенно если объектами исследованная являются модели судов с динамическими прин- ч ципами поддержания. Цель изобретения - повышение точ ности измерений динамических и кине матических параметров и достовернос получаемых результатов. Поставленная цель достигается те что установка для буксировочных испытаний модели судна в опытовом бассейне выполнена с дополнительной рамой, на которой установлены горизонтальные направляющие для ведущей каретки, ориентированные поперек опытового бассейна, при этом вдоль опытового бассейна проложены направ ляющие, которые соединены поперечными траверсами, причем на одной из траверс установлена винтовая пружина кручения с датчиком угла ее закручивания и электродвигателем, сое диненная трособлочной системой с дополнительной рамой, при этом установка снабжена датчиком положения дополнительной рамы. На чертеже представлена предлагаемая установка, общий вид. Установка содержит внешнюю ведомую каретку 1, в которой на упругих шарнирах 2 встроена рама 3. Каретка 1 снабжена роликами 4,установленными на направляющих 5, ориен тированМых поперек опытового бассейна (не показан). Для перемещения каретки 1 по направлякицим 5 служит трособлочная система со следяким приводом (не показан). Каретка 6 установлена на раме 3 с возможностью перемещения по ней на роликах 7 вдоль оси опытового бассейна и снабжена роликами 8, в которых установлен вертикальный пилон 9, соединяемый через трехстепенной шарнир 10 с моделью 11 судна. Установка имеет также ведущую каретку 12 с роликами 13, перемещающуюся с помощью следящего привода (не показан) по горизонтальным направляющим 14 поперек опытового бассейна. Каретка 12 связана шарнирной тягой 15 со встроенным упругим кольцевым элементом 16 с внутренней кареткой 6. Направляющие 5 и 14 смонтированы на дополнительной раме 17, перемещающейся на роликах 18 по направляющим 19,, ориентированным вдоль оси опытового бассейна и соединенным поперечными траверсами 20 и 21. На траверсе 20 установлены винтов.ая пружина 22 кручения, редуктор 23, электродвигатель 24 и датчик 25 угла закручивания пружины. На траверсах 20 и 21 смонтлрована трособлочная система 26, кинематически соединяющая пружину 22 с дополнительной ра мой 17. На оси блока 27 установлен датчик 28 положения дополнительной рамы 17 относительно направляющих 19. Установка, снабжена преобразователем (не показан), электрически соединенным с датчиком 25 угла закручивания пружины, датчиком 28 положения и электродвигателем 24. Установка работает следующим образом. При буксировке модели 11с заданной скоростью включается , например, рулевая машина, в результате чего модель.перемещается в общем случае в поперечном направлении бассейна, меняя осадку, с некоторыми углами рыскания. Боковое отклонение модели 11 вызывает через пилон 9 смещение рамы 3 относительно кареТки 1, что приводит в действие следующий привод системы разгрузки, перемещающий каретку 1 по направлякяцим 5 синхронно с моделью 11. Разворот модели в горизонтальной плоскости приводит в действие другой следящий привод, который перемещает по направля1рщим 14 каретку 12, постоянно совмещая с помощью тяги 15 направление буксировочного усилия с диаметральной плоскостью модели. Одновре-. менно с помощью упругого элемента 16 изменяется величина буксировочного усилия. В процессе маневрирования модели 11 происходит изменение силы сопротивления ее движению. При её увеличении дополнительная рама 17 перемещается на роликах 18 по направляющим 19 в сторону, противоположную направлению движения буксировочной тележки, закручивая пружину 22 через трособлочную систему 26. ; Вследствие ограниченных размеров Направляю|ф1х 19 и малой жесткости .пружины (большая жесткость недопустима) дополнительная рама 17 может дойти до конца направляющих. При этом ограничивается свобода продольного перемещения модели 11, что приводит к изменению режима испытаний (буксировка с постоянной скоростью). Смещение дополнительной рамы 17 от первоначёшьного положения приводит к возникновению электрического сигнала на датчике 28 положения, который поступает на преобразователь, где формируется сигнал для приведения во вращение электродвигателя 24, Последний закручивает пружину 22, увеличивая силу подтягивания дополнительной рамы 17 до такой величины, что положение равновесия средней силы сопротивления движению модели и силы подтягивания наступает, когда допол нительная рама 17 находится вблизи
своего среднего положения и знакопеременные сигналы с датчика 28 положения, вызванные колебательными перемещениями рамы, не проходят через преобразователь из-за наличия в нем зоны «ечувствительности. В этом слу- чае автоматическая система не воздействует на раму 17 и не вызывает искажений при замере силы сопротивления.
0
При изменении среднего значения силы сопротивления (например, из-за изменения скорости буксировки) рама 17 смещается относительно своего среднего положения, автоматическая
5 система вновь приходит в действие,изменяя угол закручивания пружины, и обеспечивает новый устойчивый режим буксировки.
Сопровождающие маневр боковое пе-.
0 ремещение модели, всплытие, изменение углов рыскания, крена и дифферента фиксируются соответствующими датчиками (не показаны).
Применение предлагаемой установки
5 позволяет повысит точность измерений динамических и кинематических Параметров и достоверность получаемых результатов.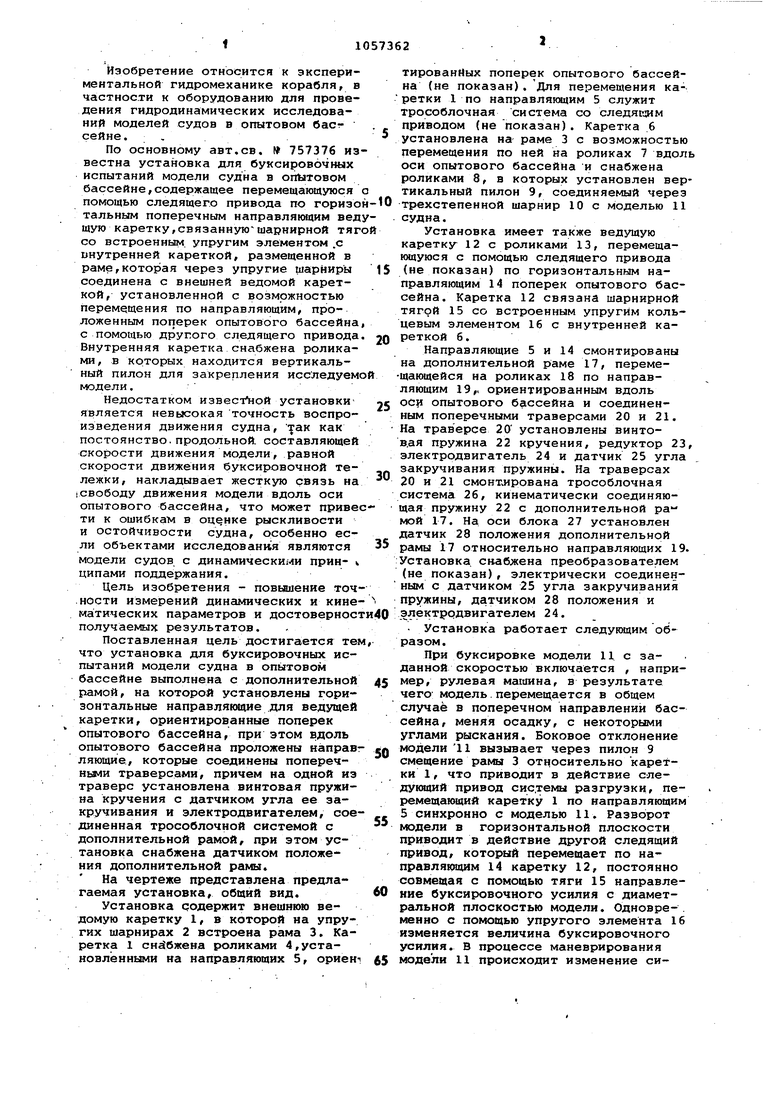
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для буксировочных испытаний модели судна в опытовом бассейне | 1982 |
|
SU1008070A2 |
| УСТАНОВКА ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАМ№» МОДЕЛИ СУДНА В ОПЫТОВОМ БАССЕЙНЕ | 1971 |
|
SU311805A1 |
| Установка для буксировочных испытаний модели судна в опытовом бассейне | 1973 |
|
SU450088A2 |
| Установка для буксировки модели судна | 1987 |
|
SU1440787A1 |
| Устройство для имитации движения судна при испытаниях в опытовом бассейне | 1987 |
|
SU1541109A1 |
| УСТАНОВКА ДЛЯ ПРОВЕДЕНИЯ МОРЕХОДНЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТНОМ БАССЕЙНЕ | 1969 |
|
SU243420A1 |
| Устройство для крепления модели судна на буксировочной тележке опытового бассейна | 1981 |
|
SU988639A1 |
| Установка для буксировочных испытаний моделей судов | 1983 |
|
SU1105369A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТНОМ БАССЕЙНЕ | 1997 |
|
RU2113373C1 |
| Устройство для мореходных испытаний моделей судов | 1974 |
|
SU522097A1 |
УСТАНОВКА ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТО ВОМ БАССЕЙНЕ ПО авт.св. № 757376, отличающаяс я тем, что с целью повышения точности измерений дийамических и кинематических параметров и достоверности получаемых результатов, она выполиена с дополнительной рамой, на которой установлены горизонтальные направляющие для ведущей каретки, ориентигрованные поперек опытового бассейна, при этом вдоль опытового бассейна проложены направляющие, которые соединены поперечными траверсами, причем на одной из траверс установлена винтовая пружина кручения с датчиком угла ее закручивания и электродвигателем, соединенная трособлоч- ной системой с дополнительной рамой, при этом установка снабжена датчиком положения дополнительной рамы.